����:һЩͼƬ�Dz�����ˮӡ��,CSDN��ͼƬ���ӵĸ�ʽ����,��ʱ����֪����ôȥ��,�����!!!
Ŀ¼
д��ǰ��:��ʵ���ϱ궨�õ� kalibr ����ֱ���������궨��IMU�궨�����+IMU���ϱ궨�������̡�����ֻд�����ϱ궨,��������֮ǰ������kalibr ����,����û��kalibr �IJ���,����Ȥ��ͬѧ����ȥ�����Լ��о�
1�� IMU�ı궨
1.1 IMU���ݶ�ȡ
����Ҫ��ȡIMU����,֮ǰд��һƪ,������IMUҲ���ҵ�һ��û�йٷ�ros���̵Ļ�,���Բο�
1.2 IMU�����˲�
����IMU�˲�,��ͬIMUӦ�ò�һ��,���̿��Բο�����
1.3 ¼��rosbag��
���˲����imu��Ϣ¼��Ϊrosbag
�Ȳ鿴 topic �б�
rostopic list

�����в鿴 topic����:
rostopic echo /topic

����IMU,¼��imu���� (һ��Ϊ����Сʱ����)
rosbag record /imu/data -o imu.bag

1.4 kalibr_allan �궨
�ⲿ�ֺ�����1.2������ȫһ��,ע����topic��������Ϊ ��/imu/data�� ���ɡ�
�����ʹ�����沩�͵�1.1���ֵ�imu_utils,��������kalibr_allan ���ȸ���Щ��
2������ı궨
֮ǰд������:
MatLab��˫Ŀ����궨��orbslam˫Ŀ����ƥ��
ROS+Opencv��˫Ŀ����궨��orbslam˫Ŀ����ƥ��
Ҳ������ kalibr ����:
1��������kalibr�ṩ������
2���������Ƶ�ʸ�Ϊ4
rosrun topic_tools throttle messages /camera/left/image_raw 4.0 /stereo/left/image_raw
rosrun topic_tools throttle messages /camera/right/image_raw 4.0 /stereo/right/image_raw
3��¼��ROS bag ��
rosbag record /stereo/left/image_raw /stereo/right/image_raw -O zed_images.bag
4��kalibr �궨:
kalibr_calibrate_cameras --target april_6x6_24x24mm.yaml --bag images.bag --bag-from-to 5 30 --models pinhole-radtan pinhole-equi --topics /stereo/left/image_raw /stereo/right/image_raw
kalibr֧���������ģ��
�������� ROS camera_calibration ��,��¼һ��,û���ù���
3����� - IMU���ϱ궨
3.1 �ⰲװ
��װ����
sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev
sudo apt-get install libopencv-dev ros-melodic-vision-opencv ros-melodic-image-transport-plugins ros-melodic-cmake-modules software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev
��װkalibr
mkdir -p kalibr_ws/src
git clone https://github.com/ethz-asl/Kalibr.git
cd ~/kalibr_ws
catkin build -DCMAKE_BUILD_TYPE=Release -j4
3.2 ��ʼ�궨
����kalibr�ṩ�����������������ļ�
�ٷ�����:
����imu�ķ���Ƶ��,�ٷ��Ƽ�Ϊ200Hz
rosrun topic_tools throttle messages /imu/data 200.0 /imu/data_raw
1�� ��IMU������̶���һ��,¼��ROS bag��
rosbag record /imu/data /camera/left/image_raw /camera/right/image_raw -o images_imu.bag
ע:
1��¼�Ƶ�ʱ��Ҫע�ⰴ�չٷ���˵��-��ּ���IMU- ��3������ת��3�������ƽ��,�����и��ٷ���Ƶ����,���Ļ����˰����ᵽBվ����
2������topic�����Լ�������ġ���������ټ�����(�DZ�Ҫ):/camera/left/camera_info /camera/right/camera_info
2�� ����У����ʼУ
kalibr_calibrate_imu_camera --target april_6x6_55x55mm.yaml --bag images_imu.bag --bag-from-to 5 50 --cam camchain.yaml --imu imu.yaml --imu-models scale-misalignment --timeoffset-padding 0.1
����:
1)�Ctarget april_6x6_55x55mm.yaml: �����궨�����Ϣ
2)�Cbag images_imu.bag: ָ�����ݰ�
3)�Cbag-from-to 5 50: �趨bag����ʼʱ��ͽ���ʱ��,�ܿ�����ͷ���IMU��ʱ����ڵ�����(̫���Ի���!)
4)�Ccam camchain.yaml: ��������ļ�
5)�Cimu xsens_imu.yaml: �趨IMU�궨��Ϣ
6)�Cimu-models scale-misalignment: IMU�IJ���ģ��
������Լ��ϨCshow extraction����,�Կ��ӻ�УĿ����ȡ���̡�����������ڷ���Ŀ�����ú���ȡ�����⡣
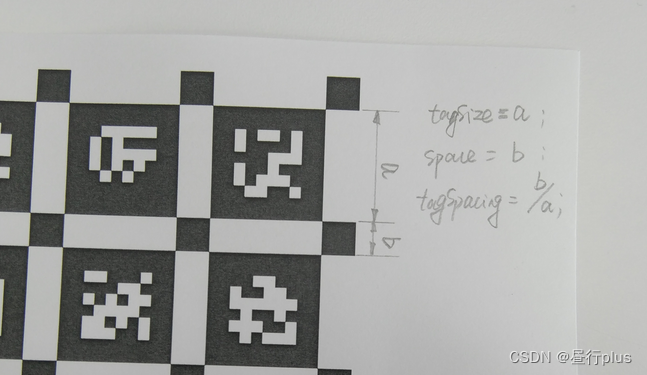
april_6x6_55x55mm.yaml�ļ�����:
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.088 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
codeOffset: 0 #code offset for the first tag in the aprilboard
Ҳ���������̸�!!!
// ���̸������������ڲ�������һ������
#example for checkerboard
target_type: 'checkerboard' #gridtype
targetRows: 12 #number of internal chessboard corners
targetCols: 8 #number of internal chessboard corners
rowSpacingMeters: 0.41 #size of one chessboard square [m]
colSpacingMeters: 0.41 #size of one chessboard square [m]
camchain.yaml �ļ�����:
cam0:
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [-0.1734857772863602, 0.026545178121976657, 0.0004291887376674085,
-3.4873170616746686e-05]
distortion_model: pinhole
intrinsics: [693.131838769146, 692.5498277671763, 616.3486206381017, 379.6677572220899]
resolution: [1280, 720]
rostopic: /stereo/left/image_raw
cam1:
T_cn_cnm1:
- [0.9999658061828064, 0.0005632950824424241, 0.0082504038578218, -0.11947602055948268]
- [-0.0006621128372211408, 0.9999280240823567, 0.011979493367486592, 0.0004870068672051519]
- [-0.008243062037729159, -0.011984546441186855, 0.9998942056912012, -0.0028910358303400464]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [-0.17456713089475154, 0.027410444232267236, 0.0006360696559962682,
-0.0002450168896166665]
distortion_model: radtan
intrinsics: [694.2107729740508, 693.480347118504, 617.3114354961933, 380.800130116761]
resolution: [1280, 720]
rostopic: /stereo/right/image_raw
imu.yaml �ļ�����:
#Accelerometers
accelerometer_noise_density: 5.43036e-03 #Noise density (continuous-time)
accelerometer_random_walk: 1.44598e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 4.9700e-03 #Noise density (continuous-time)
gyroscope_random_walk: 6.8522e-05 #Bias random walk
rostopic: /imu/data_raw #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)
�궨���:
.txt�ļ��еIJ��ֽ��,����Ҫ���������imu֮��ı任����
Calibration results
===================
Normalized Residuals
----------------------------
Reprojection error (cam0): mean 0.126389437034, median 0.117608381877, std: 0.0673478862055
Reprojection error (cam1): mean 0.132576172002, median 0.12130080264, std: 0.0739372479366
Gyroscope error (imu0): mean 0.000146638755352, median 3.16696236165e-07, std: 0.0014737840839
Accelerometer error (imu0): mean 1.14000452874e-06, median 1.02723705118e-08, std: 6.0143590628e-06
Residuals
----------------------------
Reprojection error (cam0) [px]: mean 0.126389437034, median 0.117608381877, std: 0.0673478862055
Reprojection error (cam1) [px]: mean 0.132576172002, median 0.12130080264, std: 0.0739372479366
Gyroscope error (imu0) [rad/s]: mean 5.18446291471e-06, median 1.11969028084e-08, std: 5.21061359864e-05
Accelerometer error (imu0) [m/s^2]: mean 8.06104932854e-08, median 7.26366284774e-10, std: 4.2527940778e-07
Transformation (cam0):
-----------------------
T_ci: (imu0 to cam0):
[[-0.02093225 -0.99971259 0.01168657 -0.00021865]
[ 0.13518962 -0.01441203 -0.99071492 -0.00086208]
[ 0.99059861 -0.01915798 0.13545244 0.00014753]
[ 0. 0. 0. 1. ]]
T_ic: (cam0 to imu0):
[[-0.02093225 0.13518962 0.99059861 -0.00003417]
[-0.99971259 -0.01441203 -0.01915798 -0.00022818]
[ 0.01168657 -0.99071492 0.13545244 -0.00087151]
[ 0. 0. 0. 1. ]]
timeshift cam0 to imu0: [s] (t_imu = t_cam + shift)
0.000336885304337
�����Լ�����ͷ����,��������ʱ�ղ������,���յ�������ͷ���ٸ��¡�
�ο�
ros���ݼ�¼��:rosbag record
ROS��IMU����
�����IMU���ϱ궨
camera-imu�궨 ���ϱ궨

