Ubuntu18.04安装无人驾驶系统Autoware
简介
Autoware 是世界领先的自动驾驶开源软件项目。 Autoware 建立在机器人操作系统 (ROS) 之上,可在各种车辆和应用中实现自动驾驶的商业部署。在 Autoware 基金会的支持下,Autoware 在模块化架构中包含自动驾驶所需的所有功能(即感知、规划、控制),并具有明确定义的接口和 API。 Autoware 开源软件旨在实现广泛的自主应用程序的可扩展性,并采用最佳实践和标准开发,以在现实世界部署中实现高质量和安全性。
Autoware 的未来在于 Autoware Core 和 Autoware Universe。 Autoware Core 包括支持 Autoware 项目所针对的 ODD 所需的所有功能。 Autoware Core 应用一流的软件工程实践,包括拉取请求审查、拉取请求构建、综合文档、100% 代码覆盖率、编码风格指南以及定义的开发和发布流程,所有这些都由开源社区经理管理. Autoware Universe 允许在 Autoware Core 之上构建其他软件包,以扩展 Autoware 的功能。借助 Autoware Universe,可以更轻松地集成功能以进行高级研究和开发,从而可以将功能的早期试验和部署集成到 Autoware Core 的未来版本中。 Autoware Universe 为参与将 Autoware 应用到复杂且具有挑战性的用例打开了大门,例如在密集城市环境中运行的机器人出租车或高速自动驾驶赛车。
一. ROS安装
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
apt update

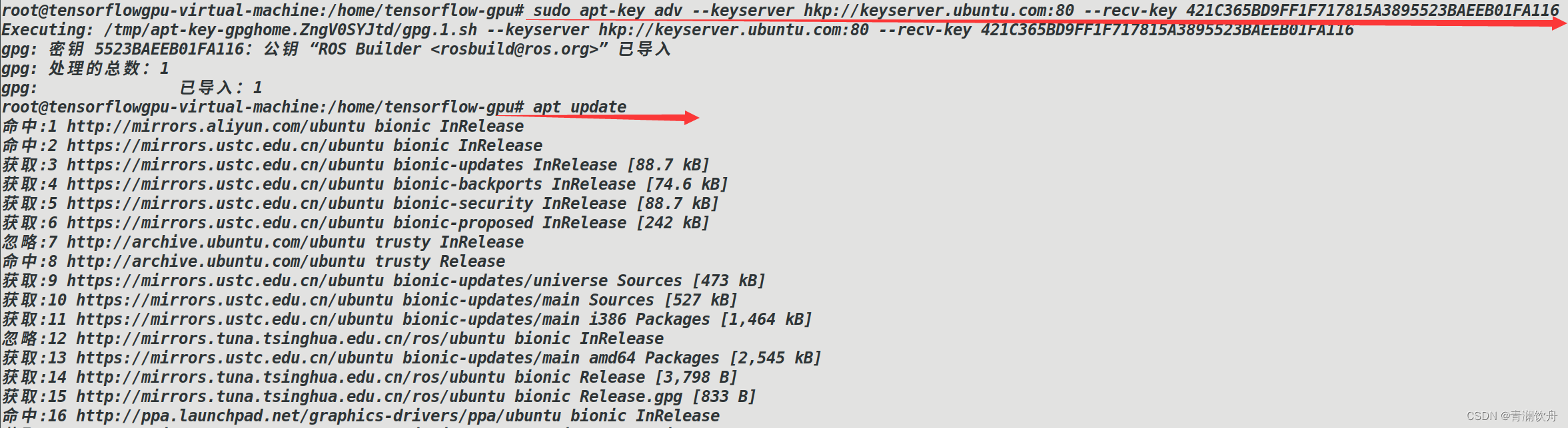
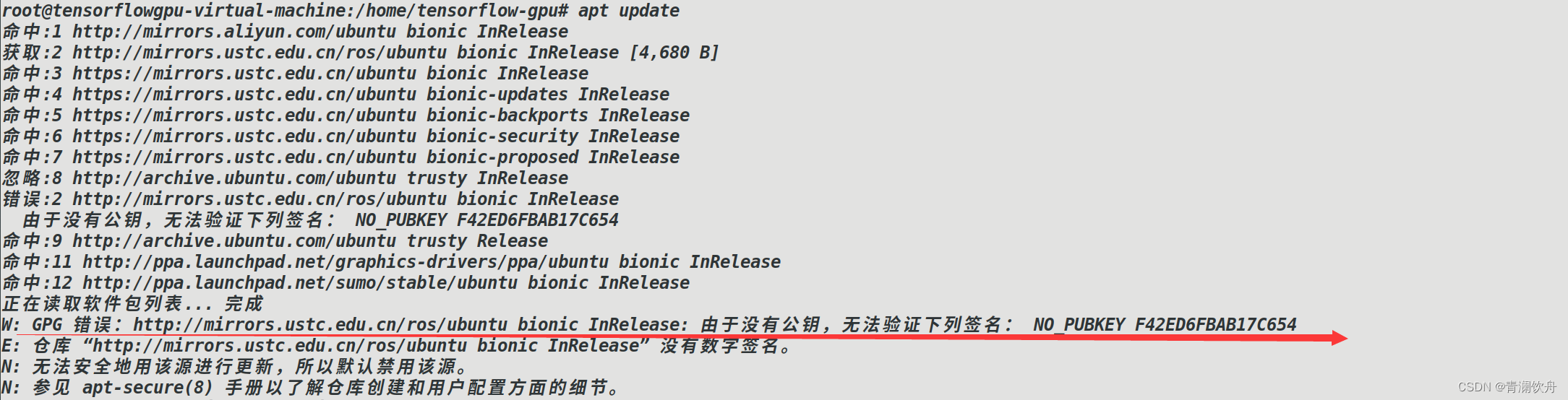
若密钥服务器hkp://ha.pool.sks-keyservers.com:80无法添加成功,则可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.net:80,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
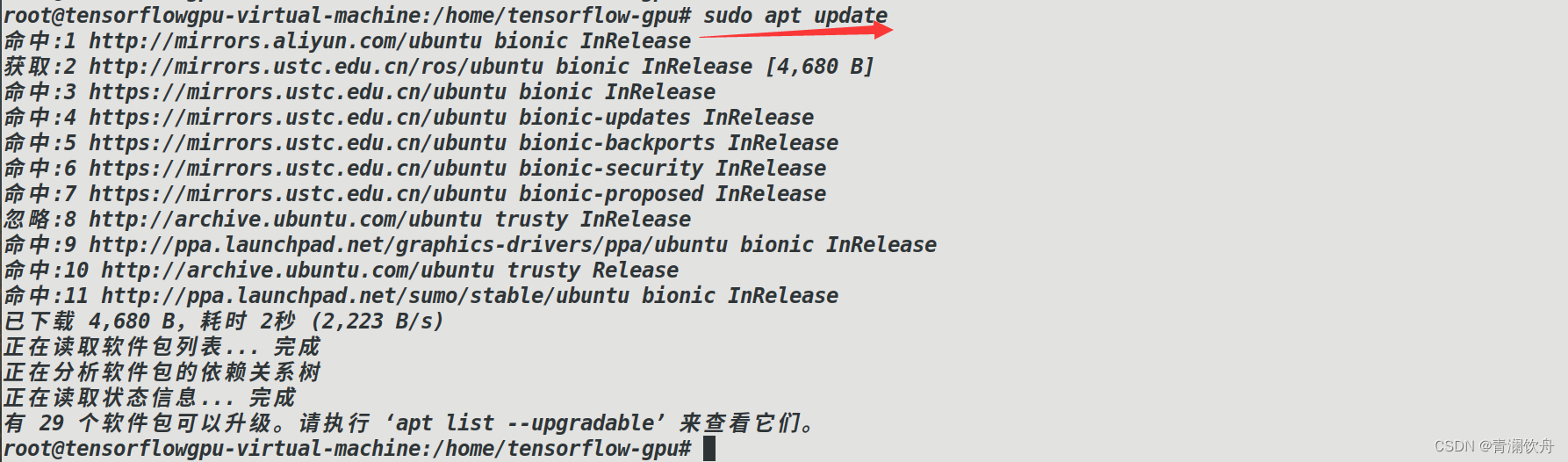
更新源:
sudo apt update
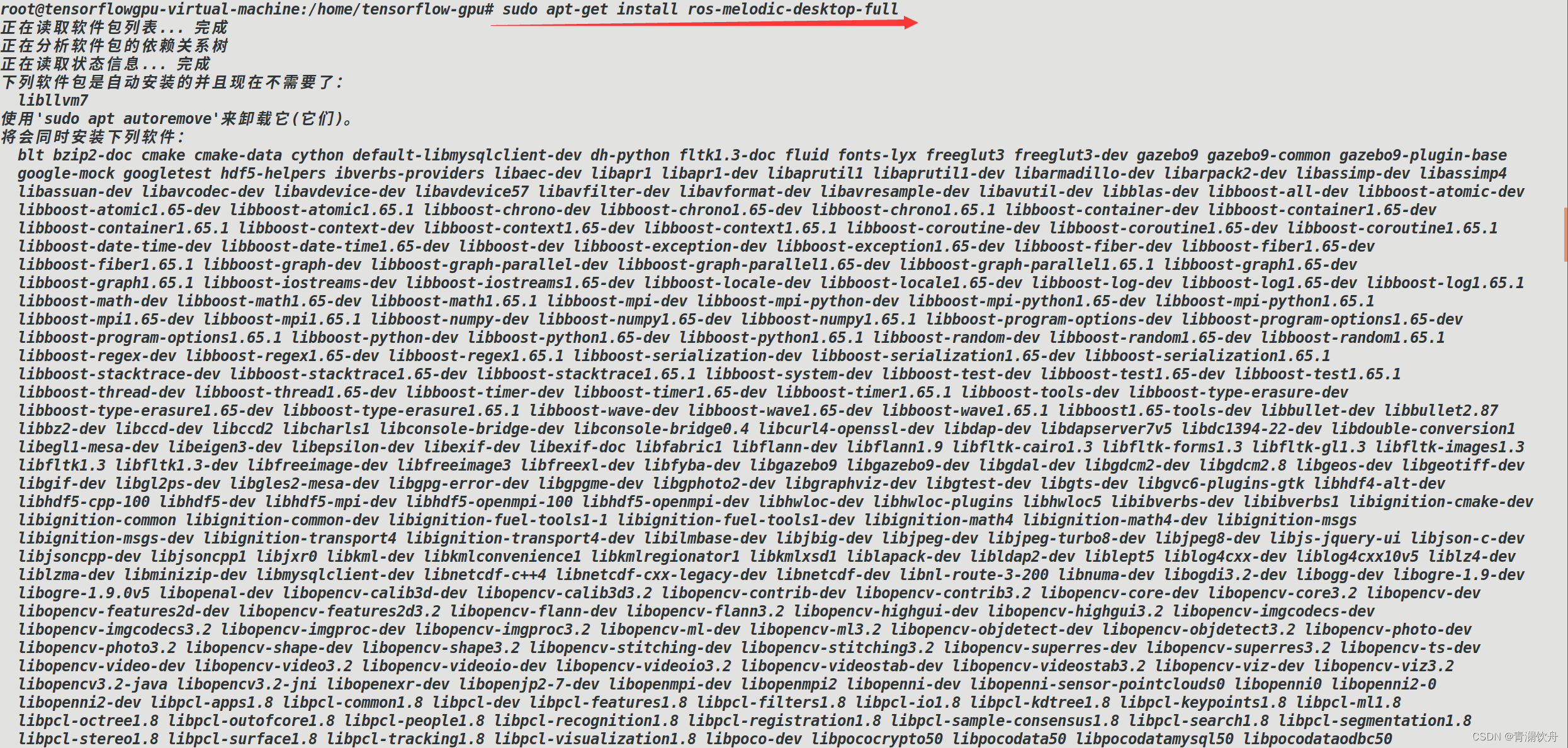
sudo apt-get install ros-melodic-desktop-full
sudo rosdep init
sudo apt install rospack-tools
rosdep update

rosdep update超时失败的解决方法:
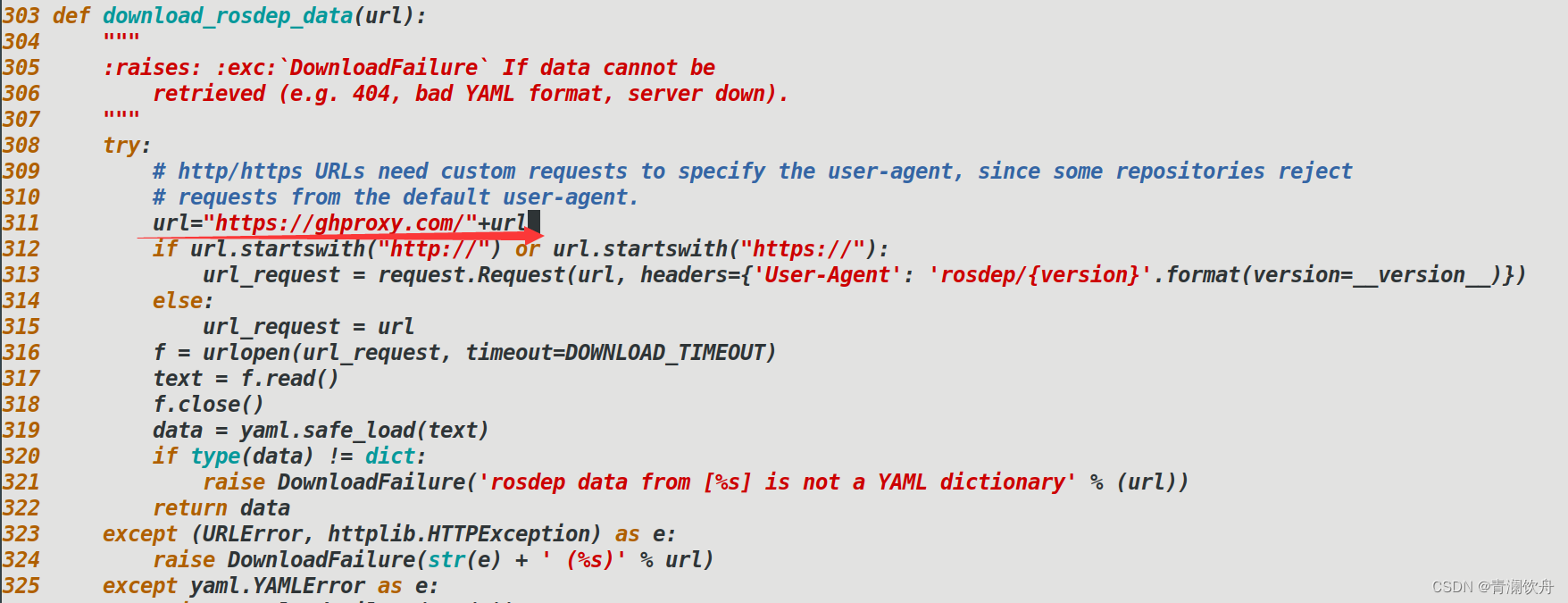
vi /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
311行 加入:url="https://ghproxy.com/"+url
vi /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
68行 加入:https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
vi /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
36行 加入:https://ghproxy.com/
vi /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
72行 加入:https://ghproxy.com/
vi /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
39行 加入:https://ghproxy.com/
vi /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py
68行 119行 加入:https://ghproxy.com/
vi /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
204行 加入:gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url











#设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#安装依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试
roscore #第一个终端
rosrun turtlesim turtlesim_node #第二个终端
rosrun turtlesim turtle_teleop_key #第三个终端
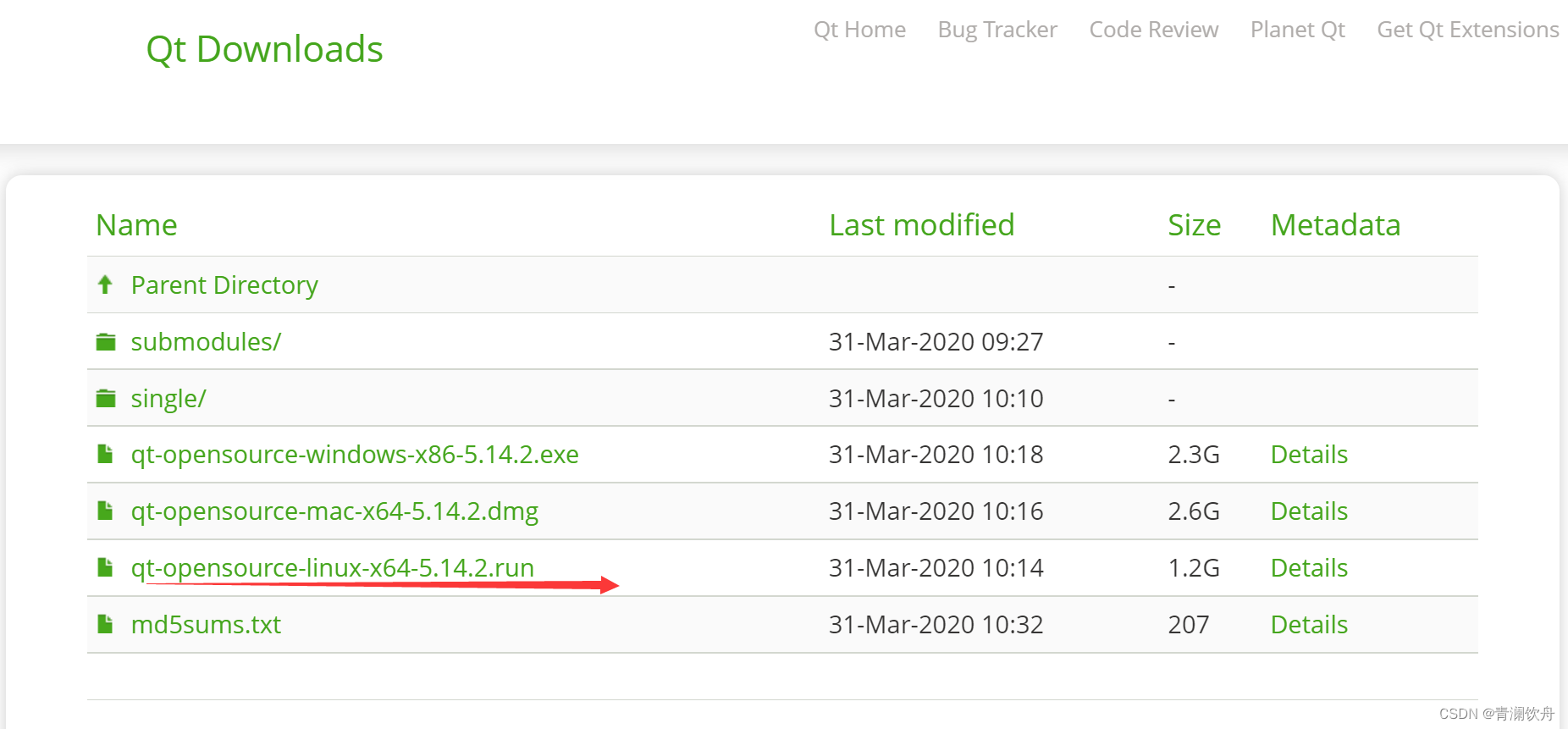
二. Qt安装
Qt下载地址: https://download.qt.io/archive/qt/5.14/5.14.2/
预环境配置:
sudo apt-get install cmake
sudo apt-get install gcc g++
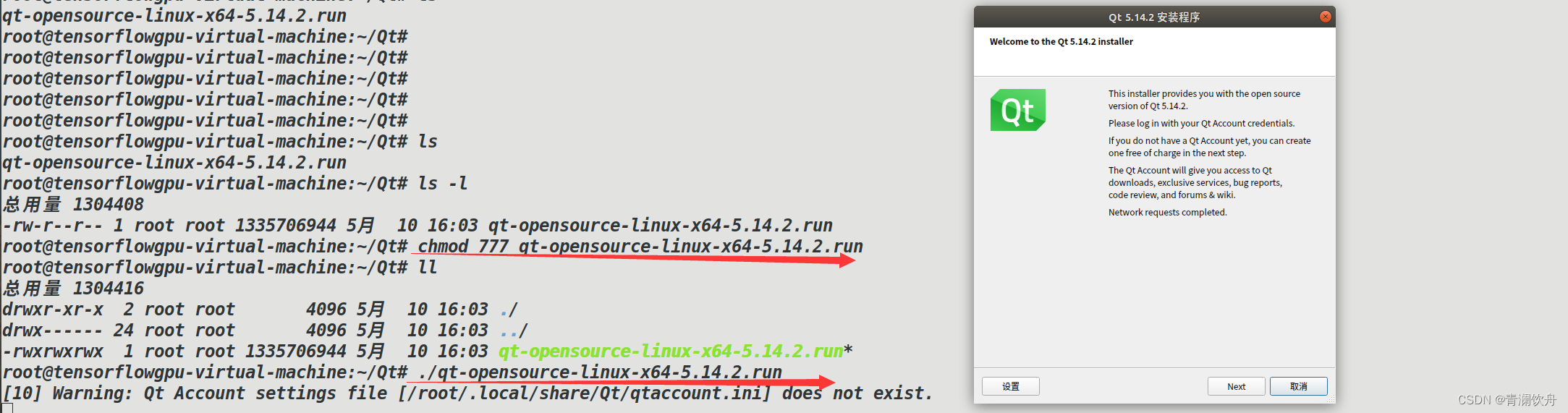
给予执行权限:
chmod 777 qt-opensource-linux-x64-5.14.2.run
运行安装程序:
./qt-opensource-linux-x64-5.14.2.run

三. Autoware安装
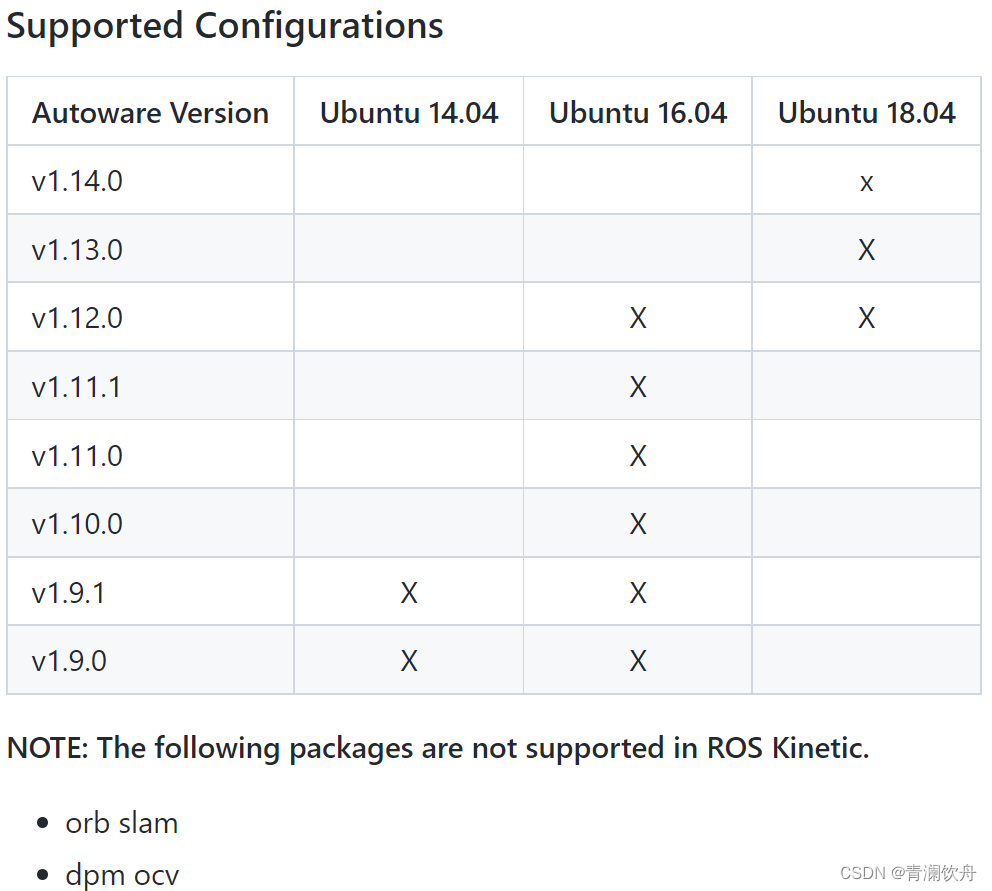
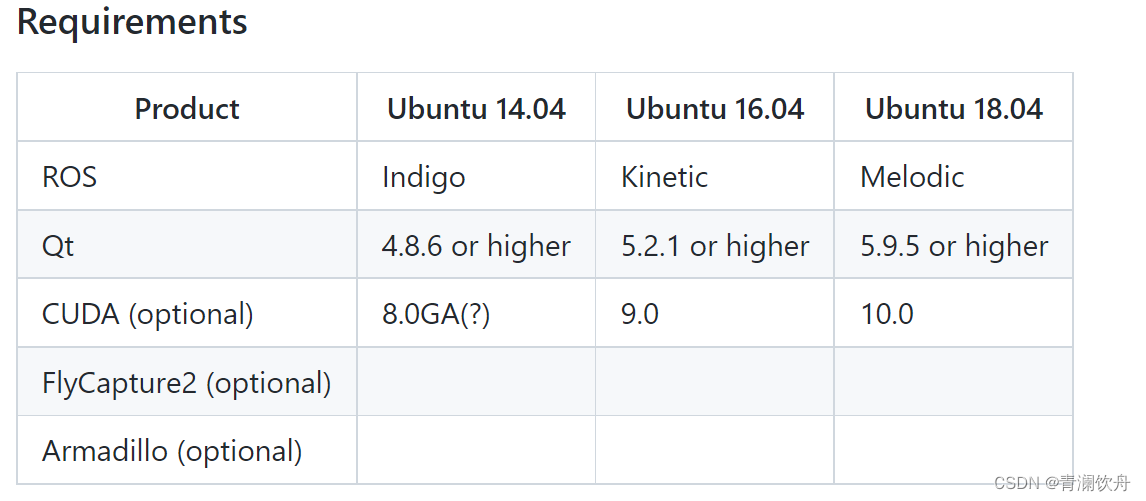
配置环境参考官网,地址如下:
https://github.com/Autoware-AI/autoware.ai/wiki/Source-Build
预环境安装:
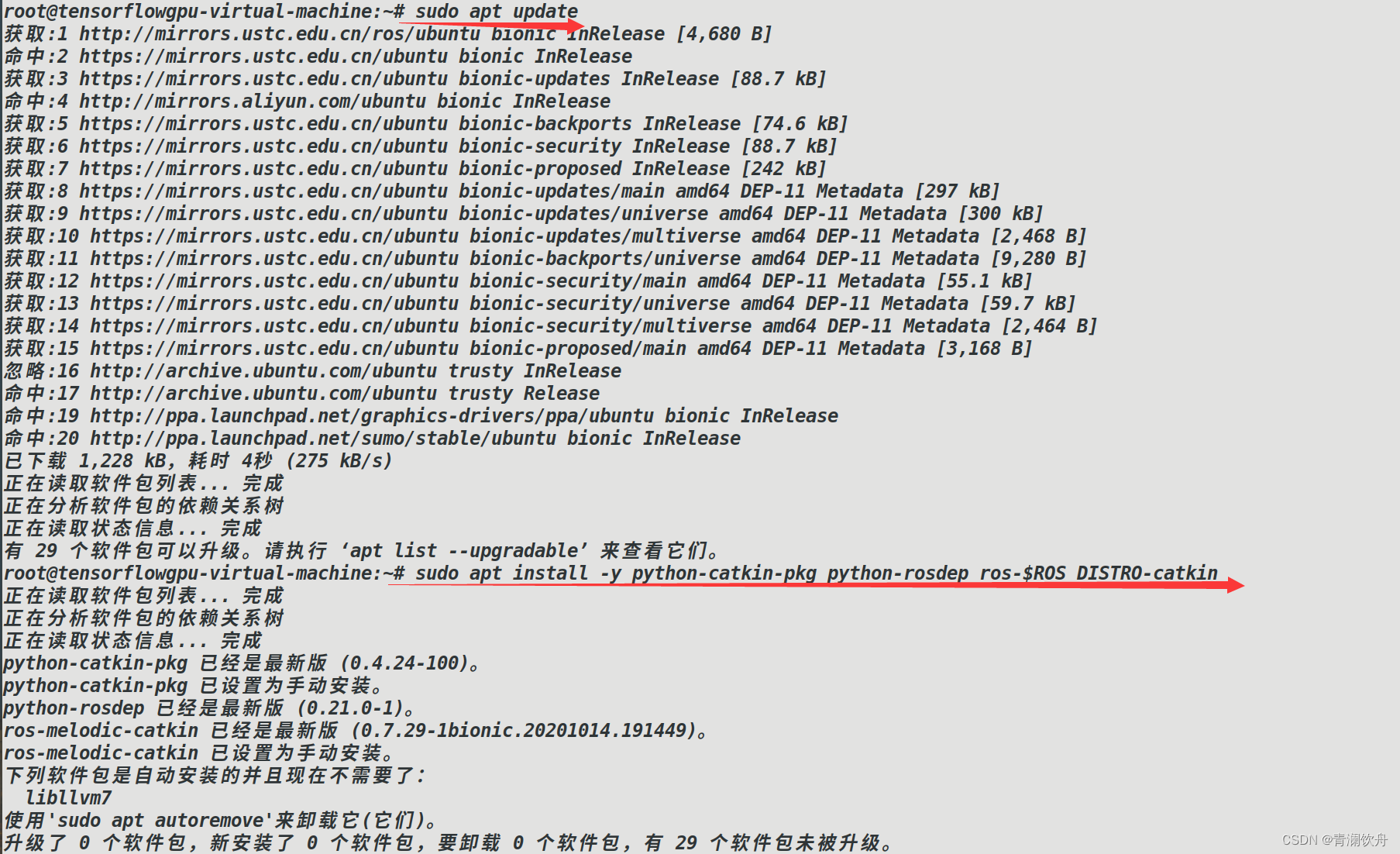
sudo apt update
sudo apt install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin
sudo apt install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
pip3 install -U setuptools

安装编译autoware:
mkdir -p autoware.ai/src
cd autoware.ai
wget -O autoware.ai.repos "https://raw.githubusercontent.com/Autoware-AI/autoware.ai/1.14.0/autoware.ai.repos"
vcs import src < autoware.ai.repos
rosdep update
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
#Without CUDA Support
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
确保154个包文件全部通过,有问题重新执行命令即可



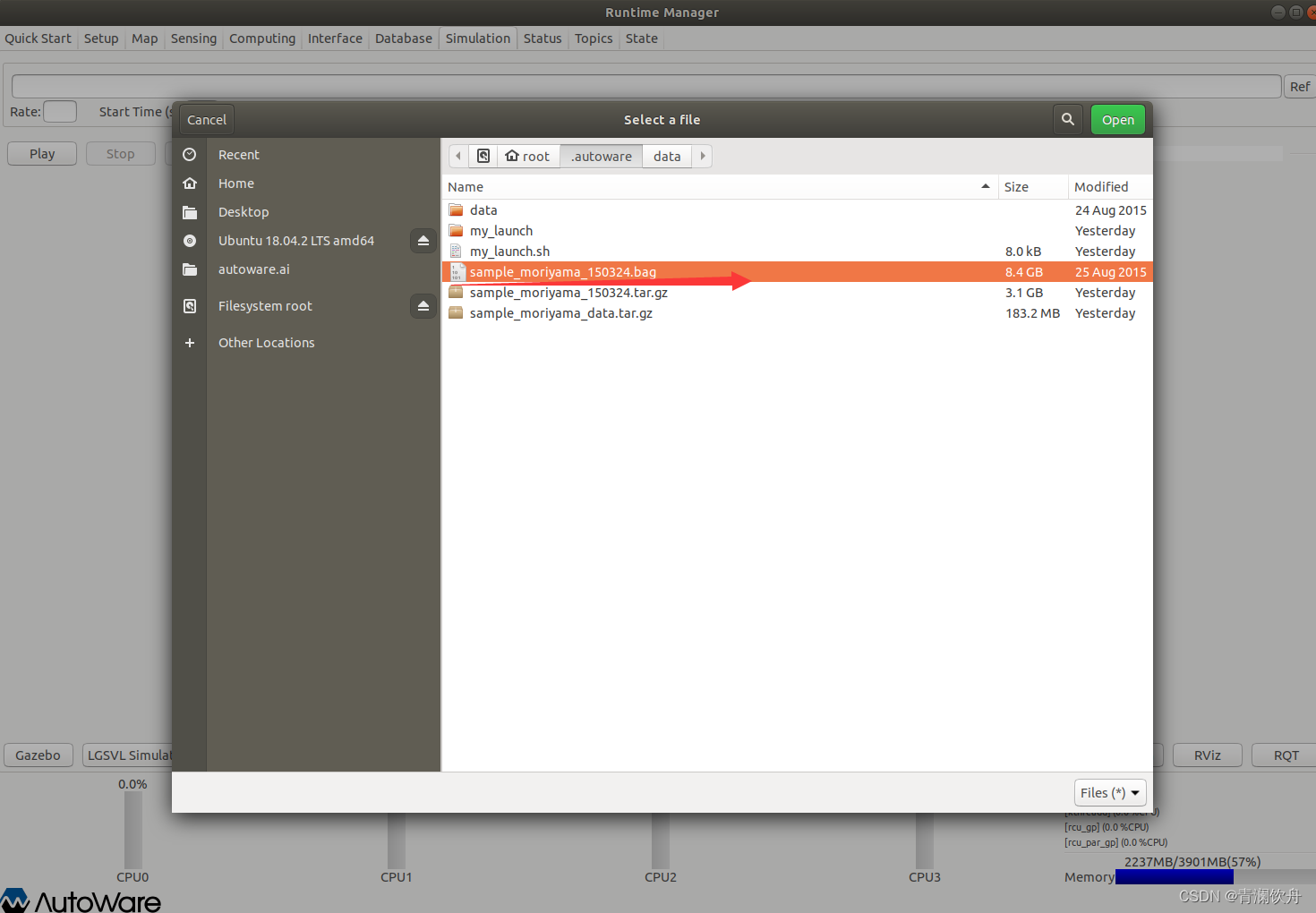
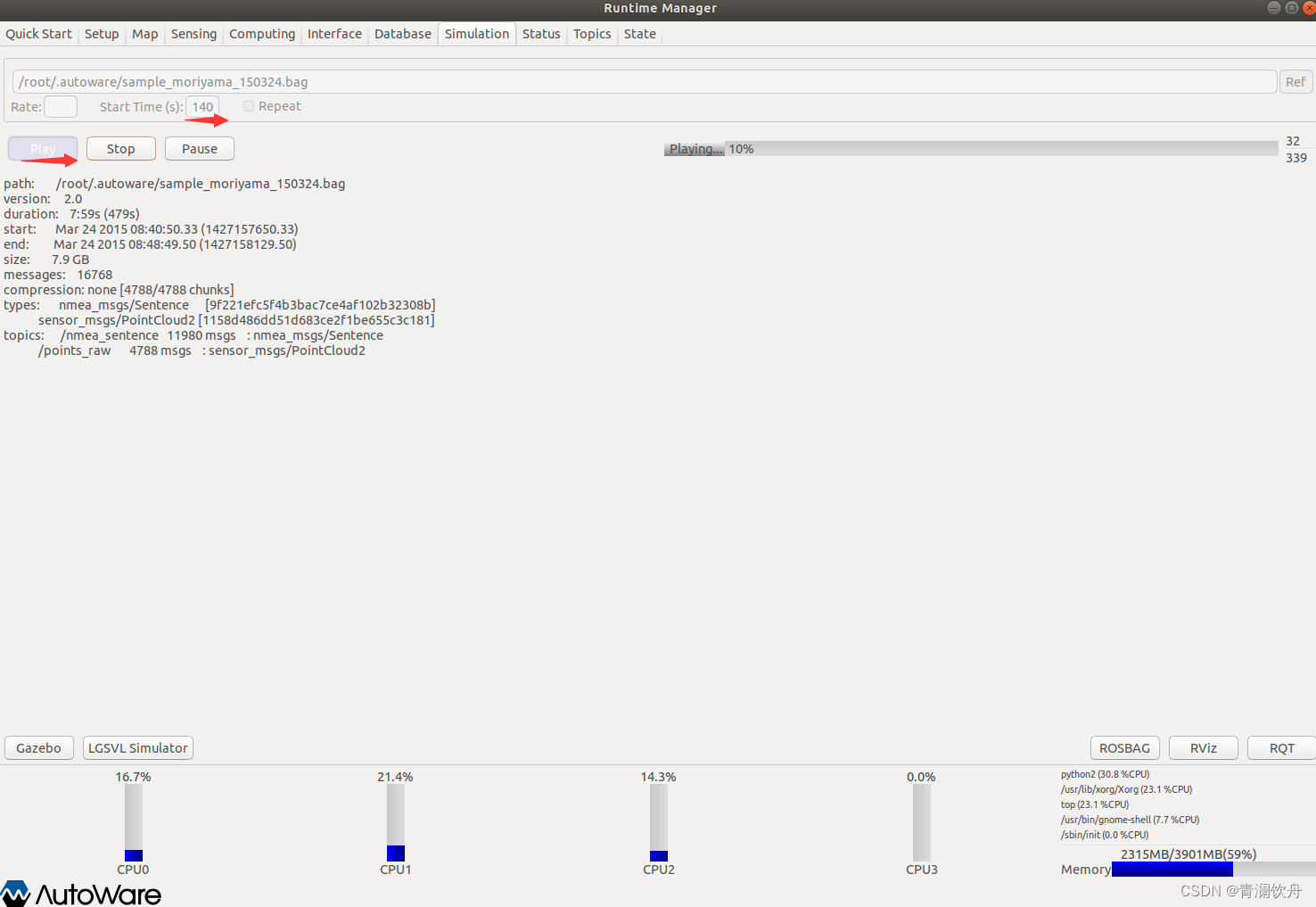
ROSBAG示例:
mkdir -p ~/autoware_demo
cd ~/autoware_demo
#下载3D pointcloud/vector map data
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz
#下载ROSBAG data
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz
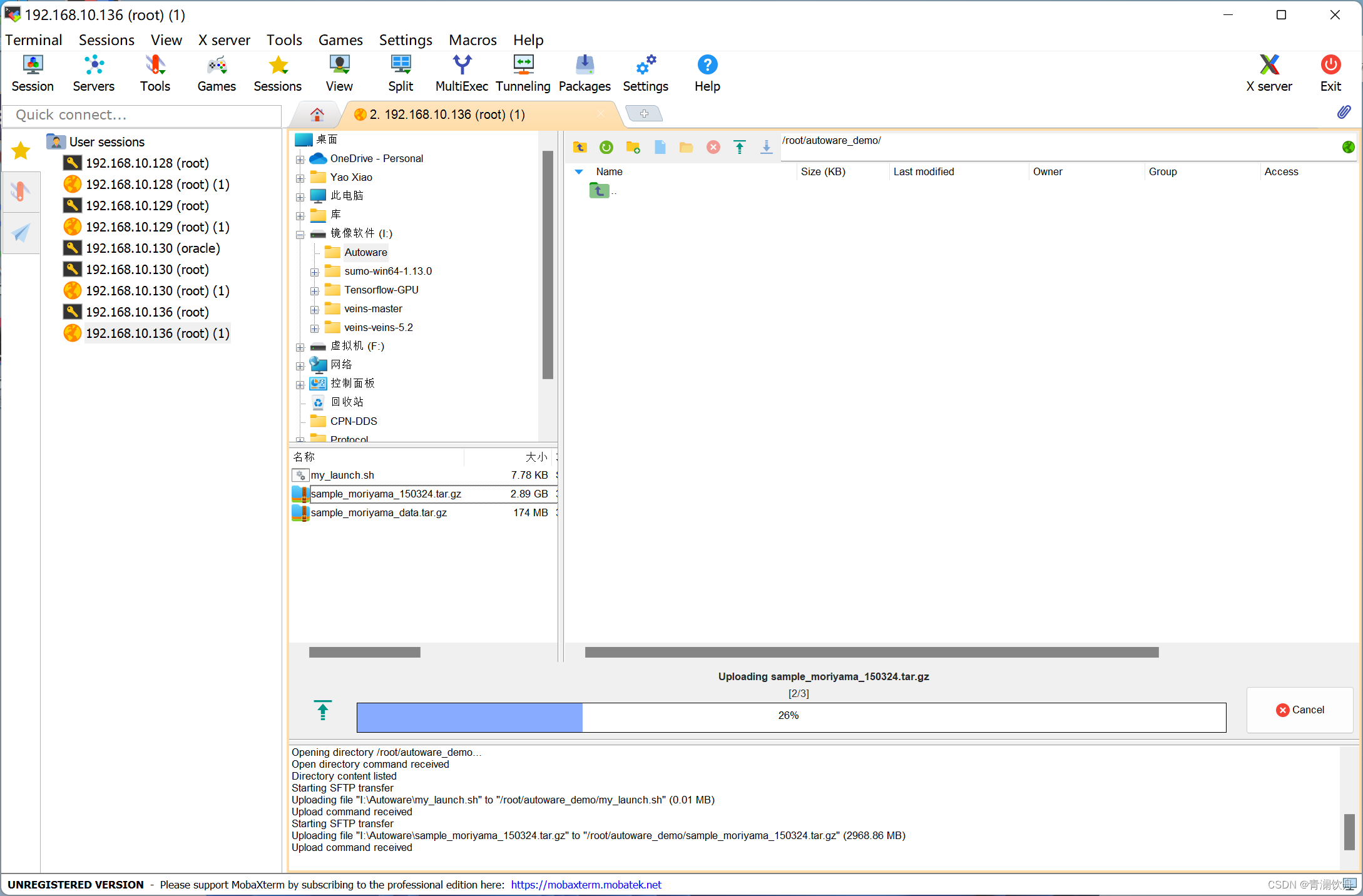
这两个包比较大,下载速度很慢,可以先下载到本机,然后通过xsehll传到虚拟机中

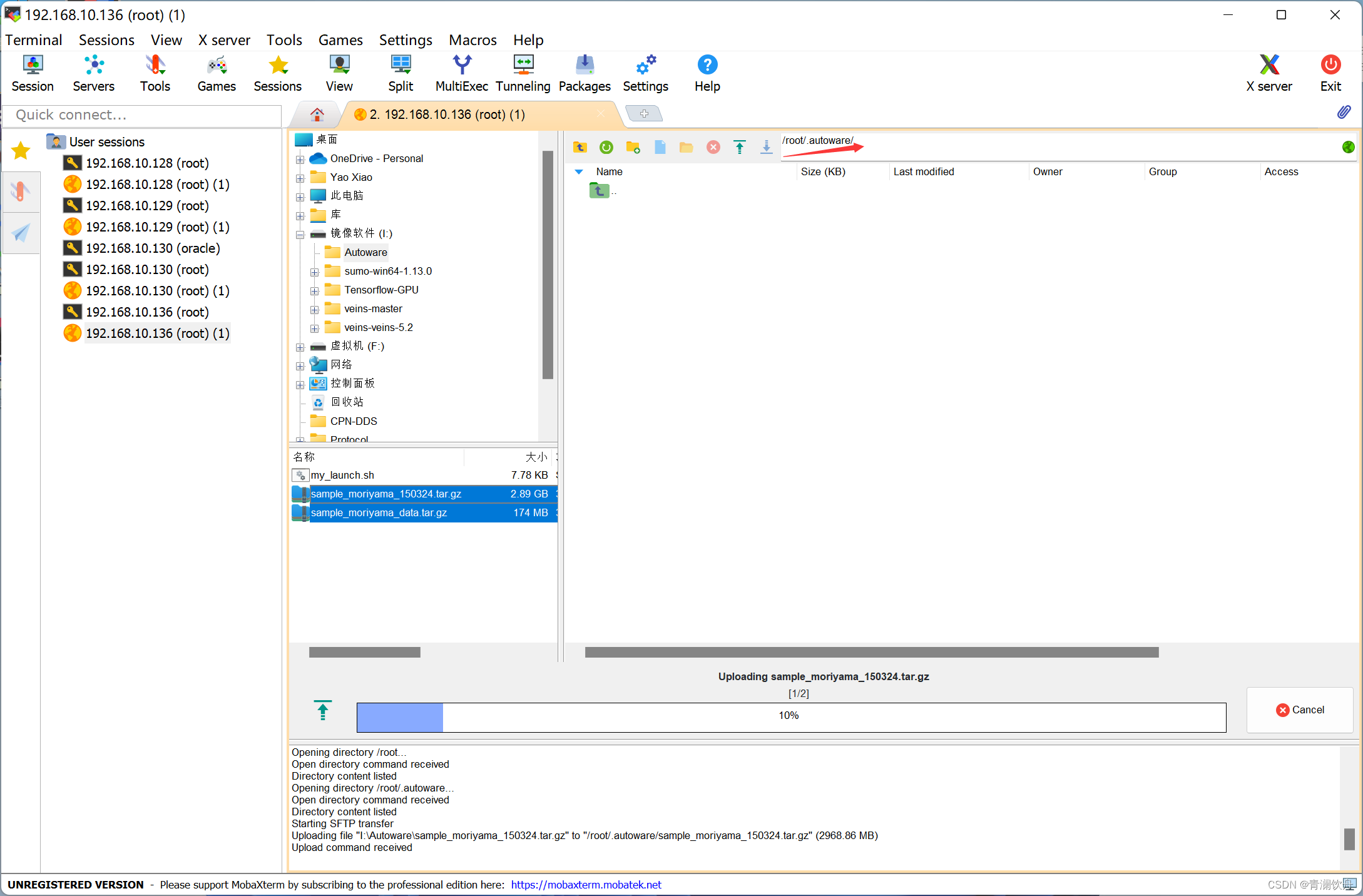
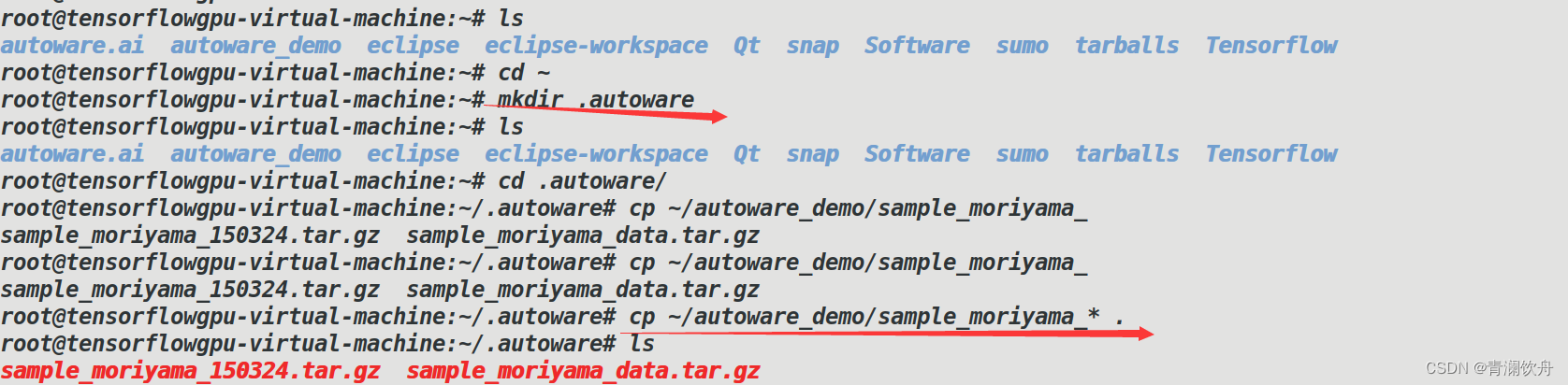
创建.autoware:
mkdir .autoware
cd .autoware
cp ~/autoware_demo/sample_moriyama_* .
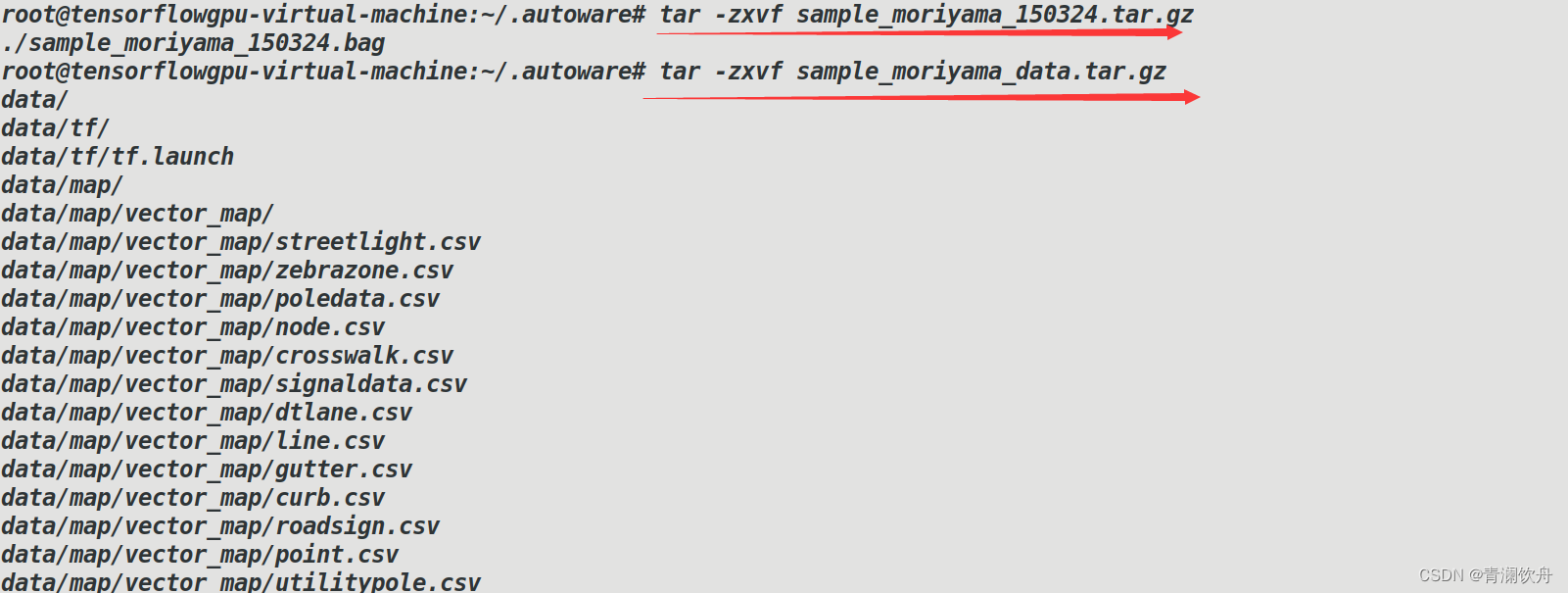
tar -zxfv sample_moriyama_150324.tar.gz
tar -zxfv sample_moriyama_data.tar.gz
运行autoware:
cd autoware.ai
sh my_launch.sh
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch (可能会报错,如下)

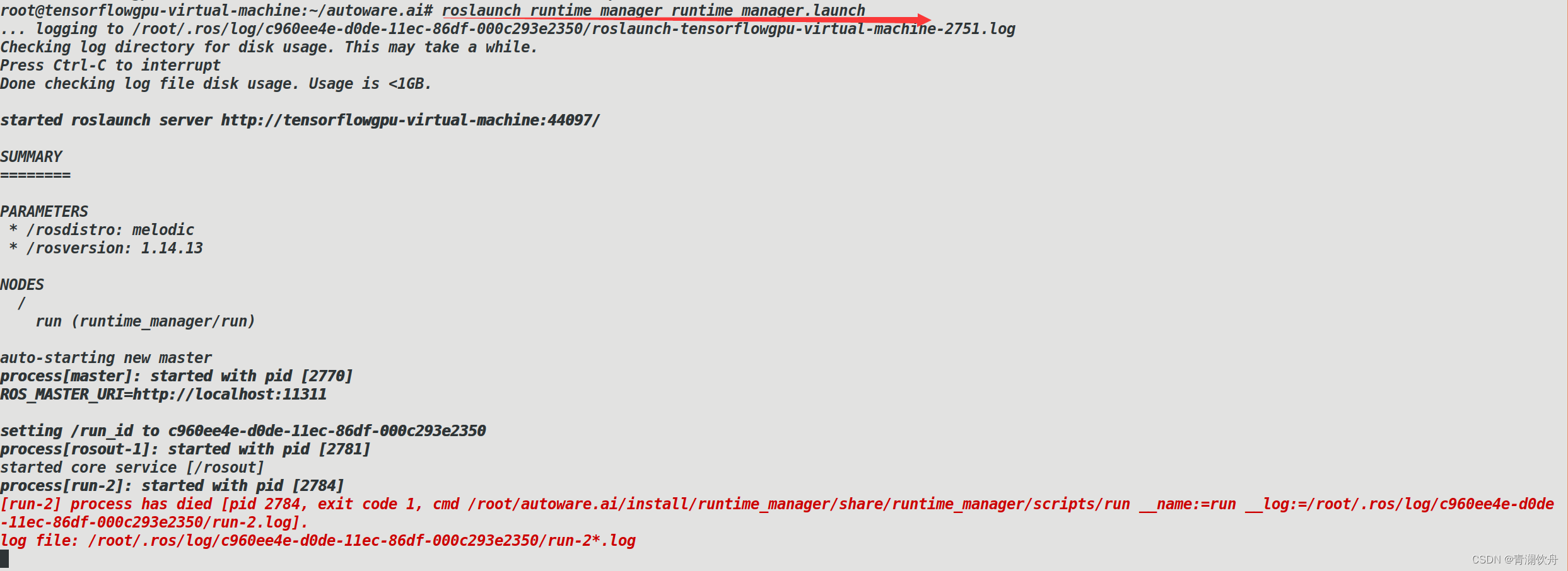
解决方案:
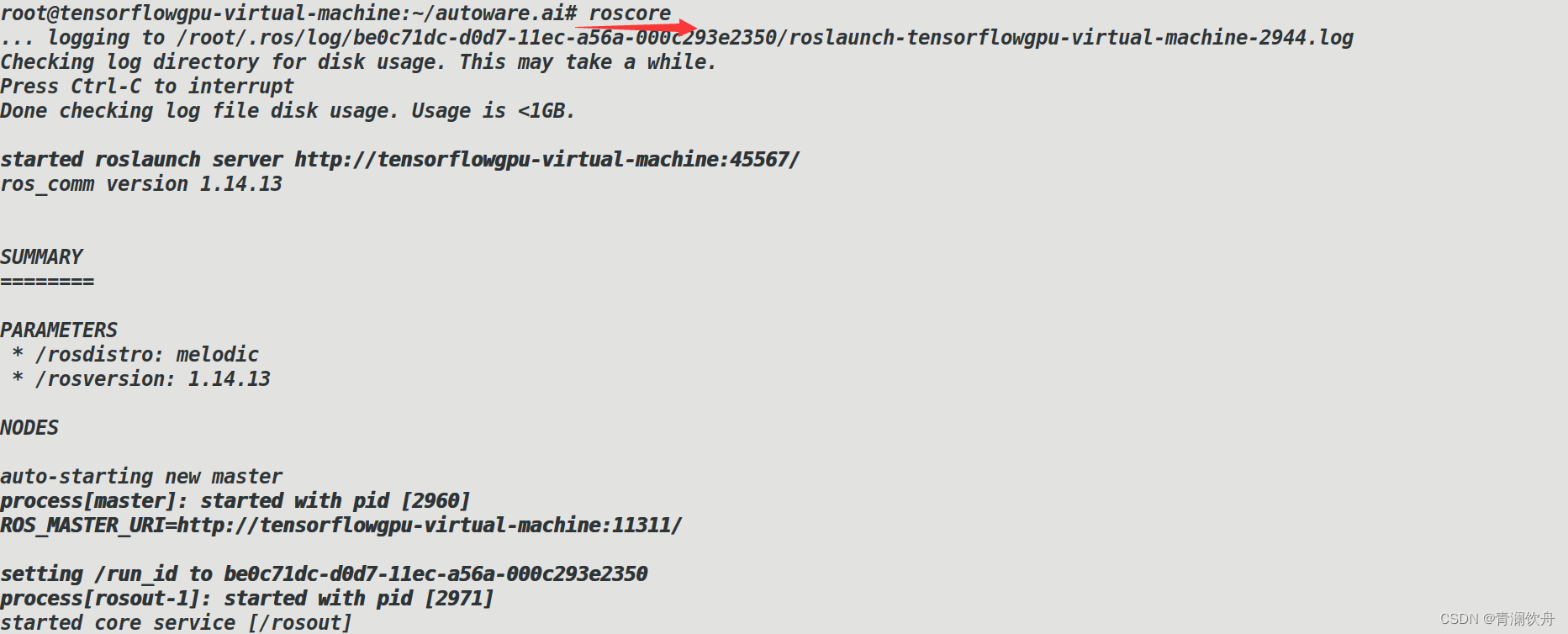
roscore #第一个终端
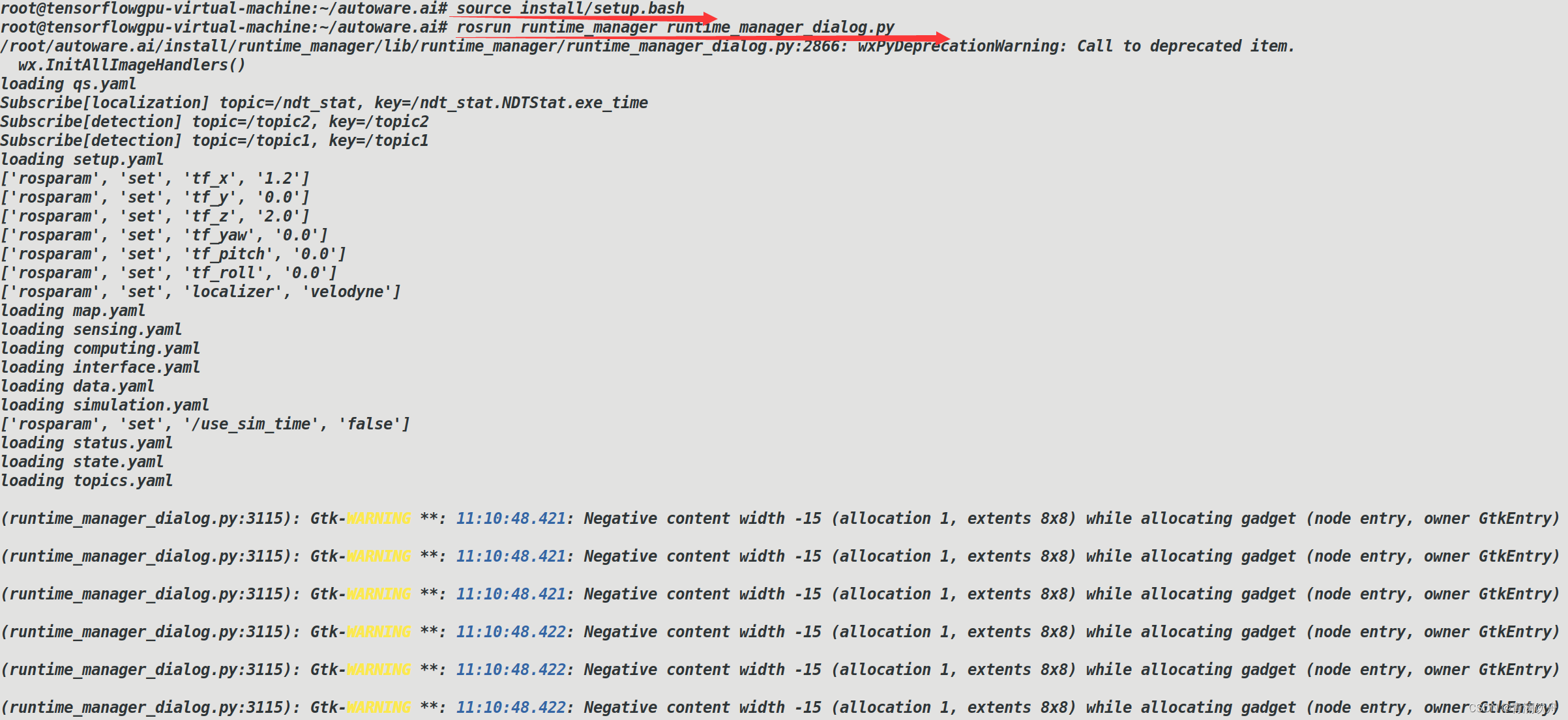
cd autoware.ai #第二个终端
source install/setup.bash #第二个终端
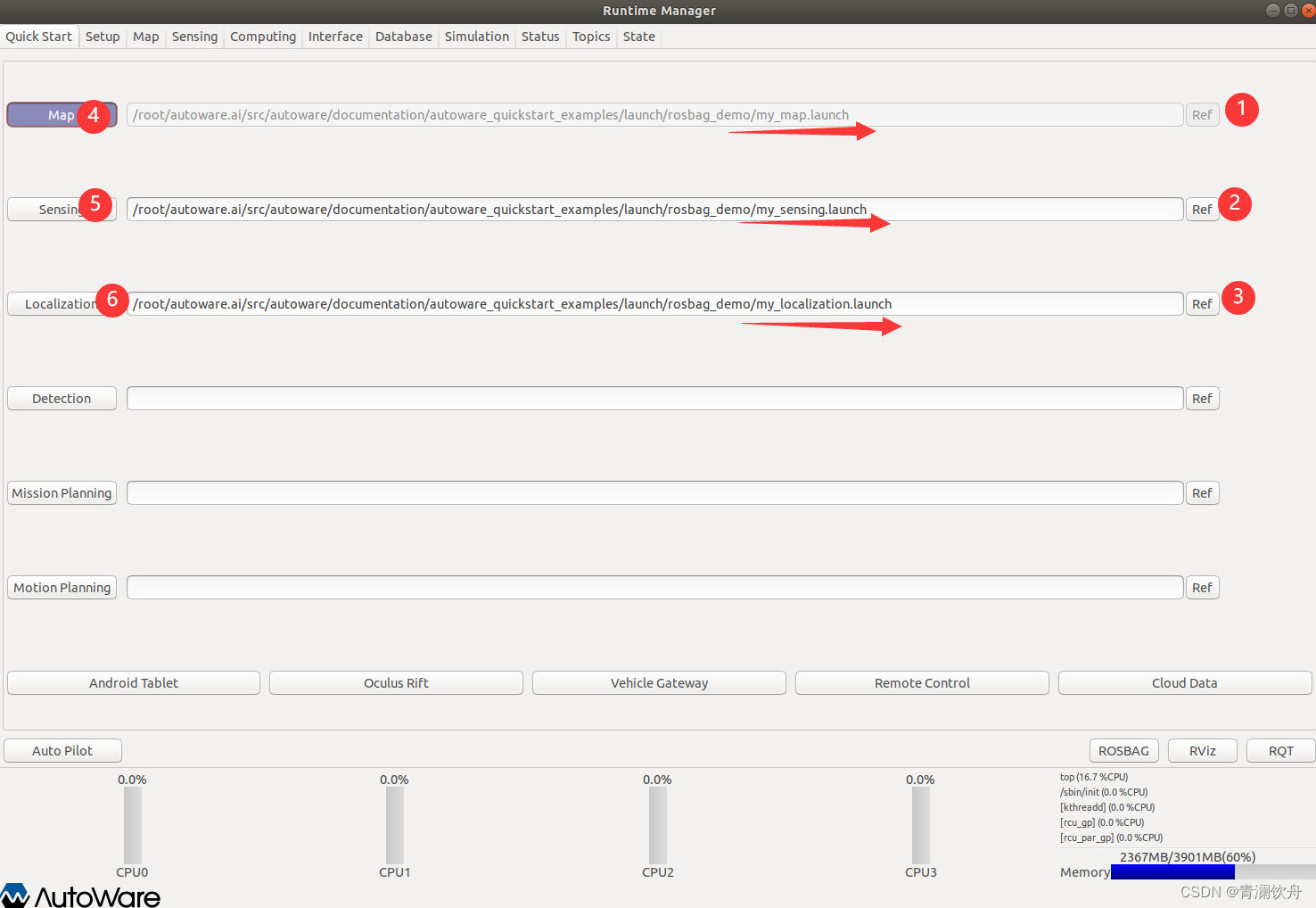
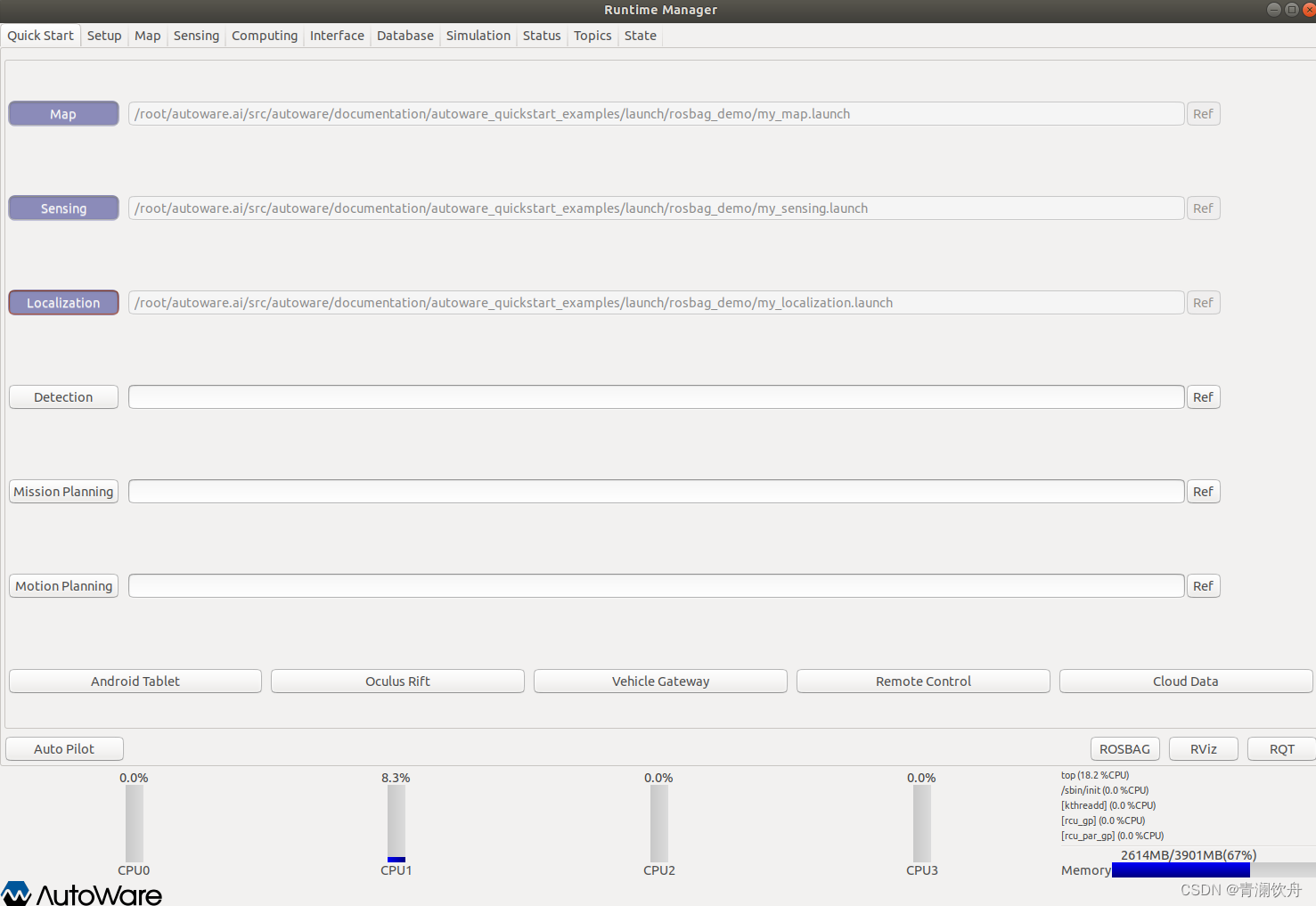
rosrun runtime_manager runtime_manager_dialog.py #第二个终端
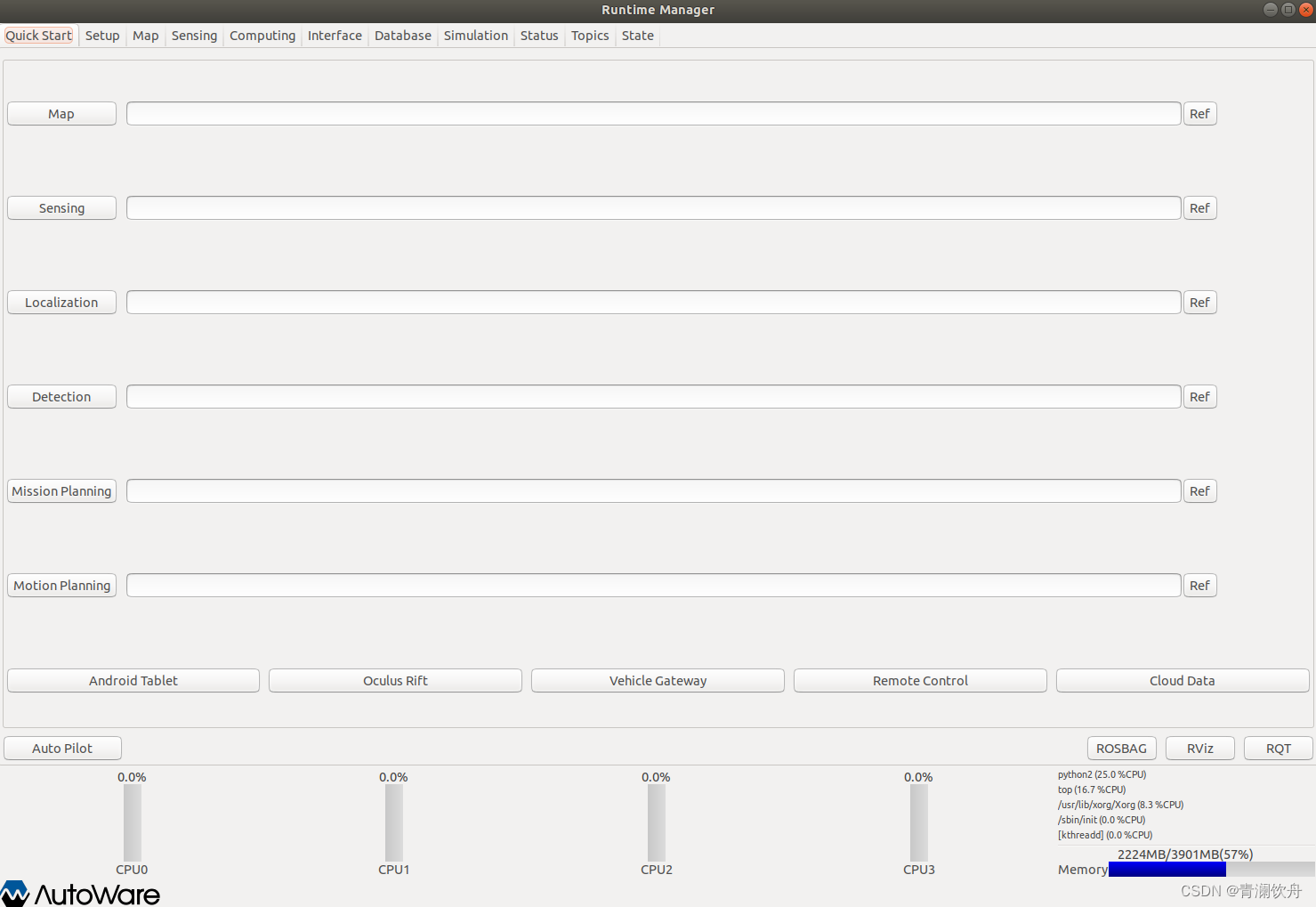
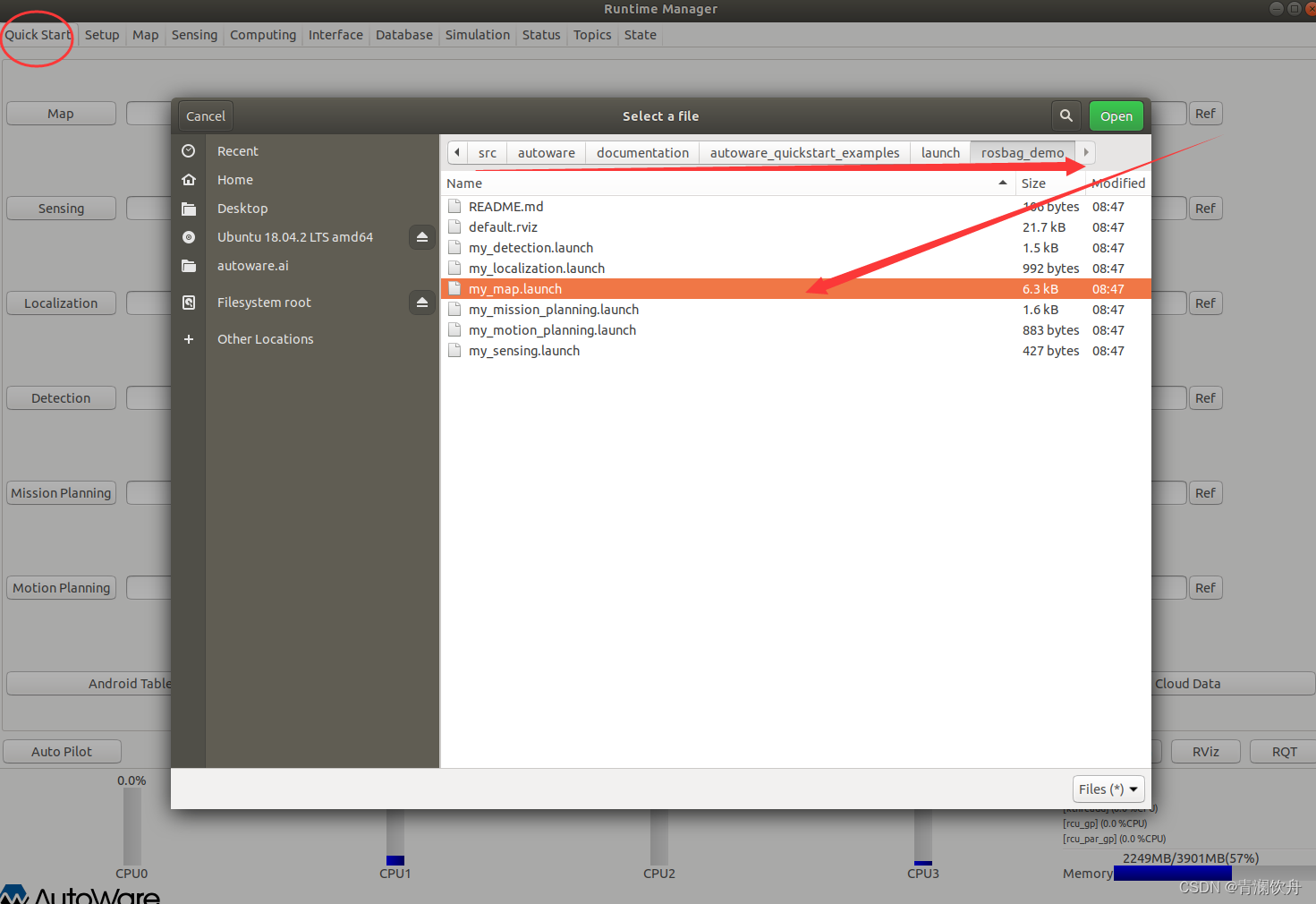
加载launch文件
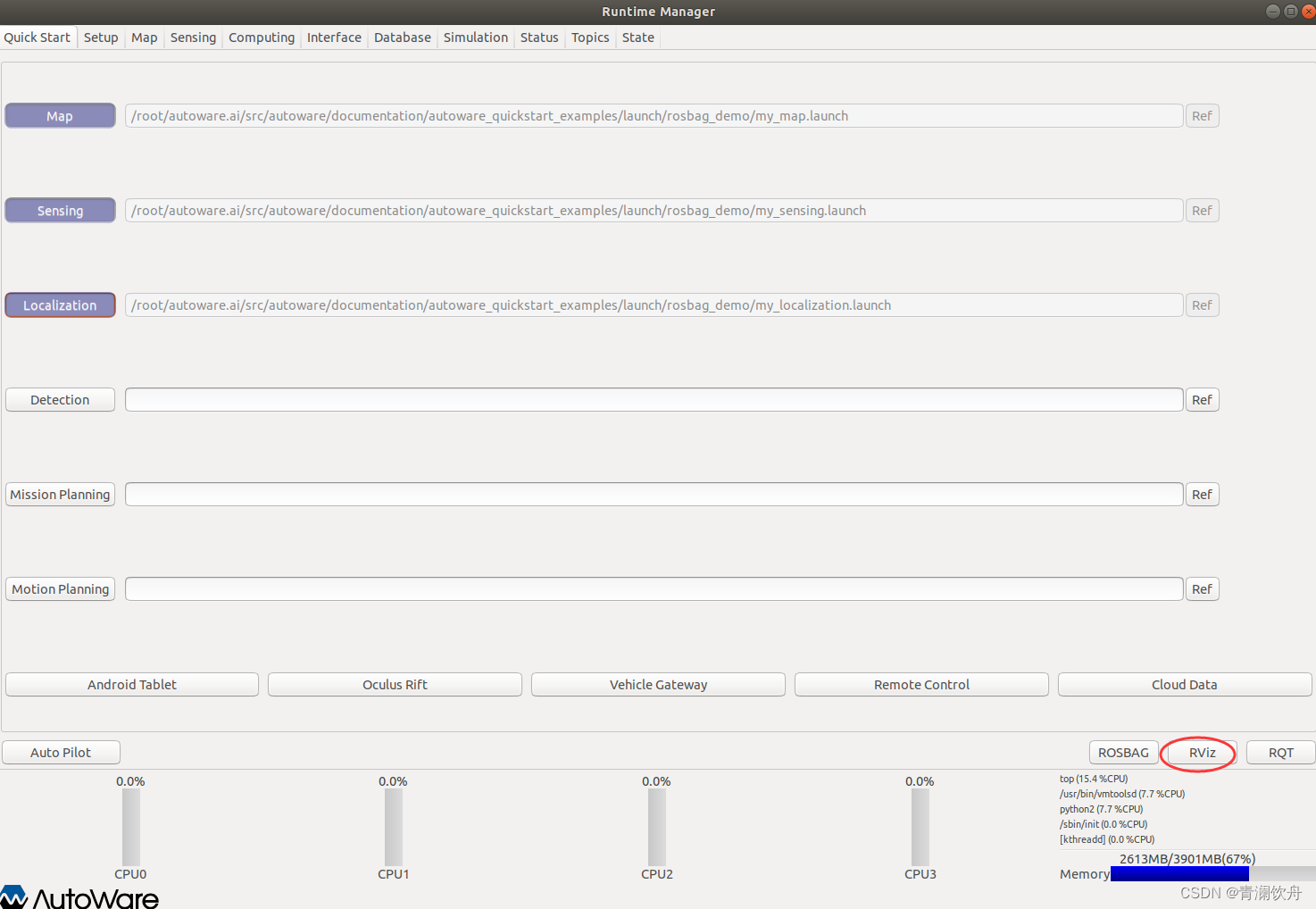
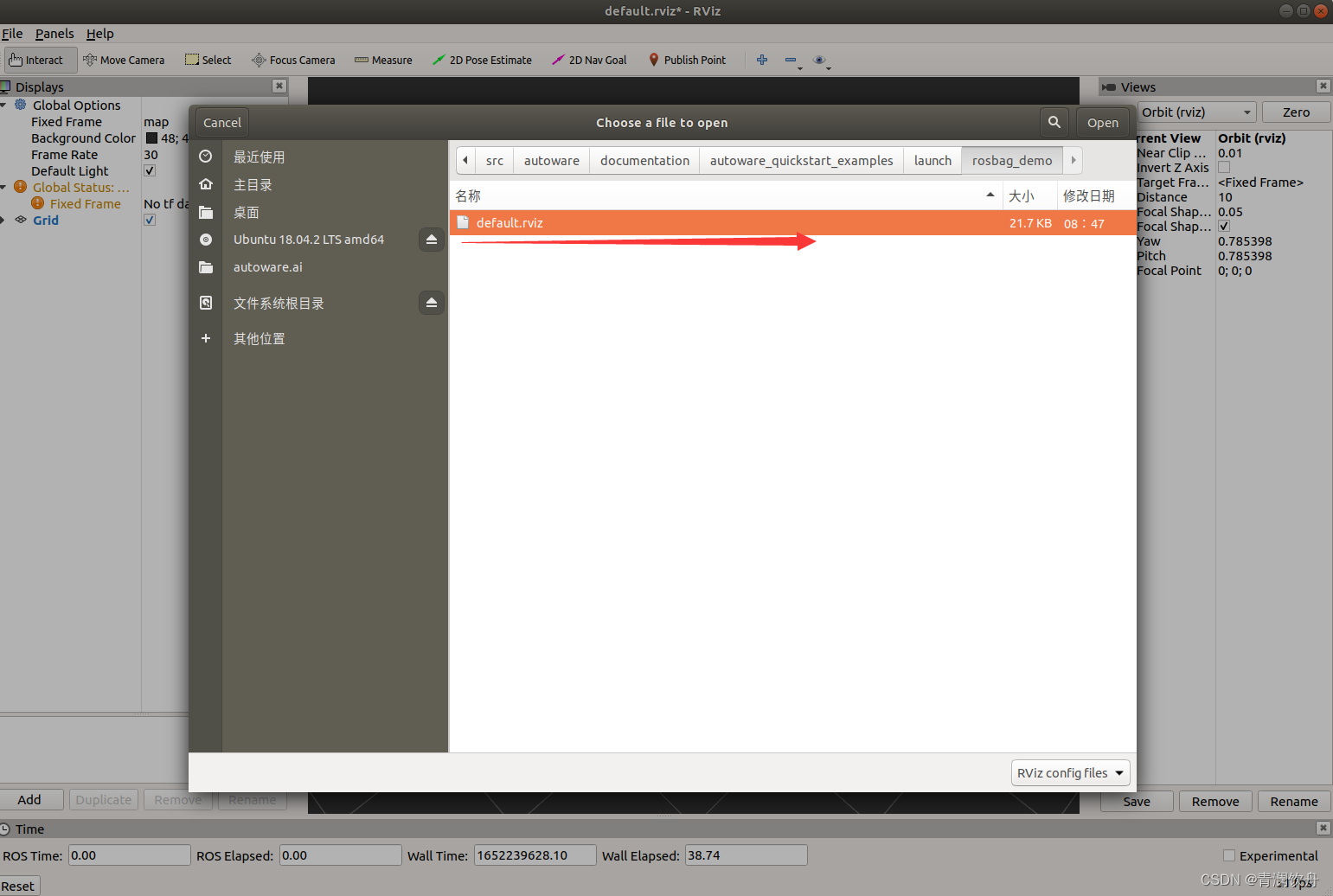
启动Rviz可视化界面

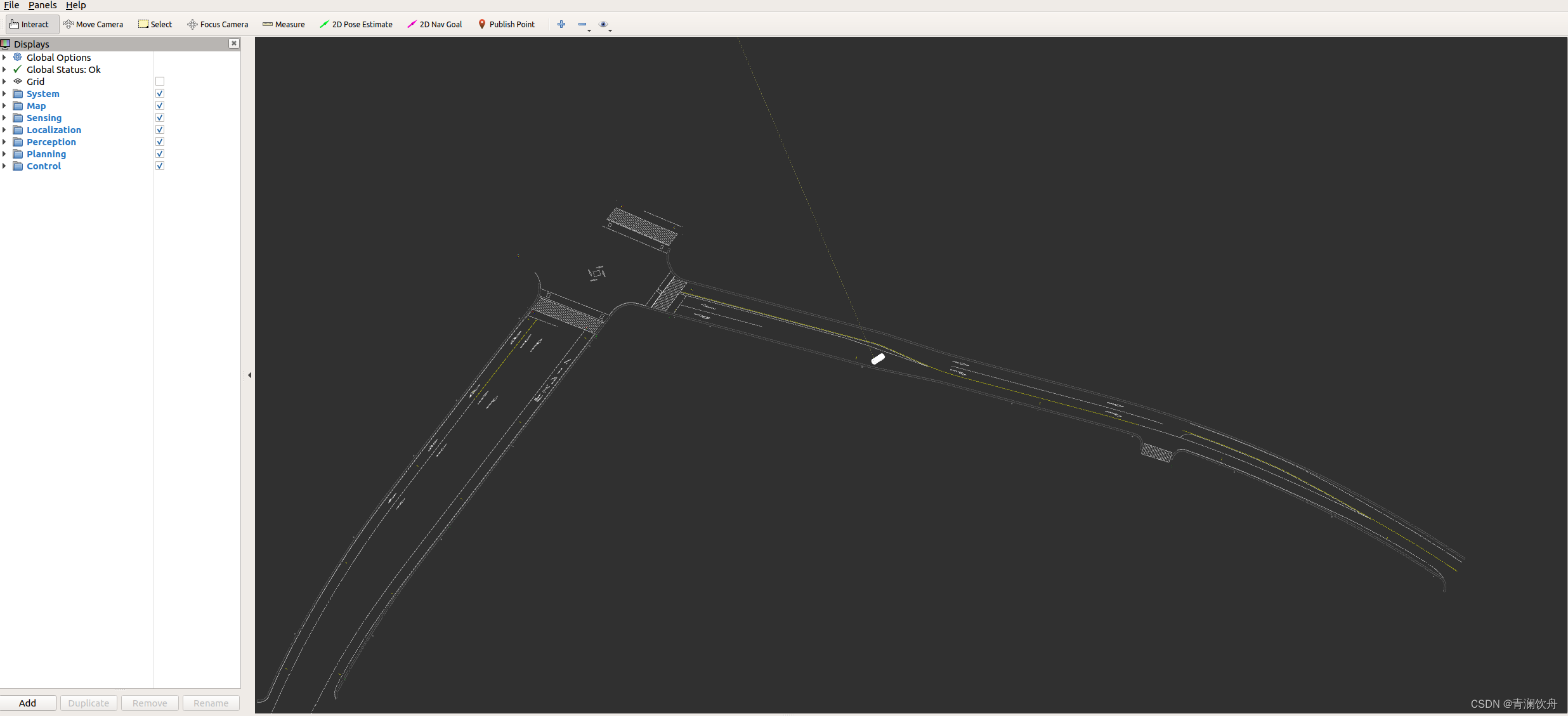
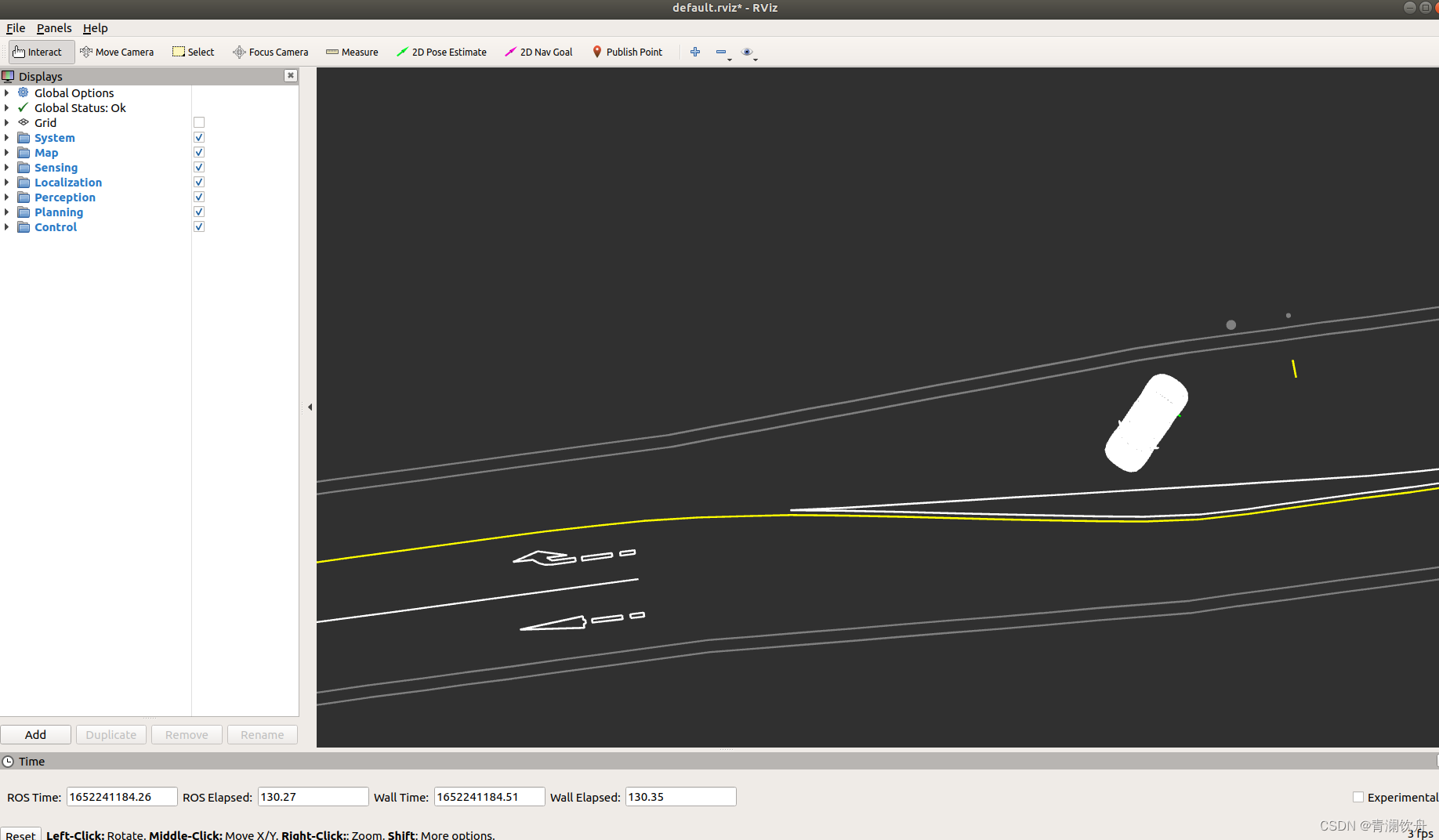
喜欢的小伙伴可以尝试一下哦
这是小编公众号,请动动您可爱的小手手,关注一下💓😘


