�����ֻ������õ�MEMS�����ǡ����ٶȼơ���ǿ�ƺ���ѹ�Ƶȴ�����ΪPDR��VDR�ṩ������,�����������ֻ���PDR��VDR�㷨������Ȼ�����Žϴ���ս�����������ж����������һ��˼��,�ش˼�¼������
1. �ִ���ս
- ��ͬ�ֻ��Ĵ�����������Դ��ڲ��졣������ͬ�ͺ��ֻ�,ͬ�ͺŵĴ�����֮������Ҳ���ܴ��ڲ��졣�ֻ�����ʱ��̫����ÿ���������Ϊϸ�µı궨����,�Ͼ������Ѽ�оƬ,�ɱ��ϵͳ��̲�̫��Ͷ��϶����Դ������������,�����з��ָ�ͨ���ֻ�ʹ��ʱ�����˾�̬�ж�ȥ����ƫ�IJ���,��Ȼ�������ֻ������вŻᴥ����
- ����C�ֻ����ڲ�����ǡ����彲��Ϊ�˨C�ֻ��Լ����C�ֻ�֮�������ϵ���Զ���(ת����ϵ����ȷ�õ�),����֮���������ں����ϵ�ƫ���,�˽Ƕ���Ҫ�ڵ���ǰ�ڻ����й��Ƴ�����
- ����ʹ��ϰ�����ء�����PDR,��ͬ���䡢���ߡ��Ա�������ֳ����ƺͲ�̬�����ϴ��ڲ���,��Ҫ���ǵ����ؽ϶ࡣ����VDR,�ֻ��ڷ��ڳ����ĵ�λ���Լ��ܷ����㷨������������������Ҫ���ǵ����⡣
- �����������ϴ�ʱ�ᵼ�µ��ι������ϴ�������,���Ҫ�����ֻ�PDR/VDR,��Ҫǰ�ڲɼ��ϴ�����������Ը����㹻�ij���,��˱�Ȼ�����ϴ��������,�������Ӵ��������,��ͳ�����ĵ���ѹ���ϴ�
2.����
ע����������о��߽������ߵ��Ļ�е��������PDR,��EKF�ںϲ�̬���������ٶȡ��ش�ʸ���ȹ۲���Ϣ,�������PDR��³���Ժ;��ȡ�Ҳ���о��߽�������������뵽�ֻ�PDR/VDR��,�Խ�������ĸ��ֲ�ȷ�����غʹ������������⡣����������������Ҫ������/������ǰ���ٶ�,����PDR����ֱ�ӵõ����˵�λ��,��������������Ϊ�۲������ٶȽ���Լ����
2.1 ����PDR
2.1.1.��̬+��������緽��
�ɲο�������,RoNIN: Robust Neural Inertial Navigation in the Wild: Benchmark, Evaluations, & New Methods
��Ŀ��ַ
�÷�����������ҪΪ�ֻ��ļ��ٶȼ����ݡ���ǿ�������Լ���̬��Ϣ,������̬�����ٶ����ݺ����������ݴ�bϵת��nϵ,Ȼ���������������ģ��(ResNet��LSTM��TCN),Ȼ��Ԥ��������ǰ���ٶ�,������л��ּ��ɵõ�λ�á��˷�������ֵ�ɼ���ʽҲ�Ƚ�����˼,��Ҫ���ù�ѧ����ϵͳ,���ڶ������ܲ����ij���Ҳ��Ƶķ����������
������֮ǰҲ�ɲο�RIDI��OXIOD�����ַ���,����Ҳ�Ա��˾��ȡ�
�˷�����Ȼ�Ƚ������ֻ���̬�ľ���,�ر��Ǻ������,�������ڴŸ��ŵ��ж��ʹ����㷨������Ҫ��

2.1.2 ��Ϸ���
1)�����������Ϣ
�ο����ţ��ʦ�Ŷӵ�����Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones
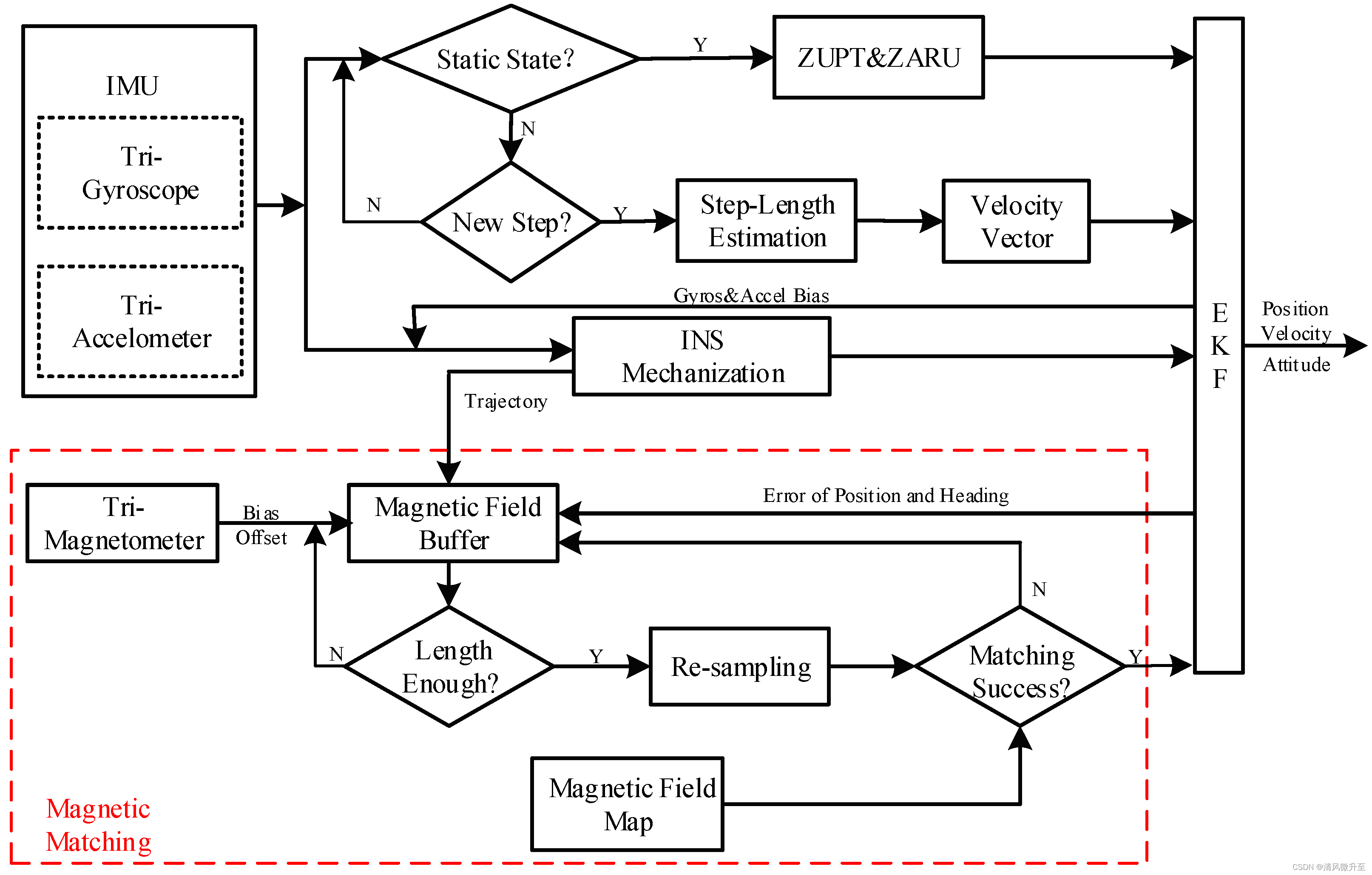
�˷�����,�Ƚ�����˼�����ں���INS,ZUPT&ZARU(Լ���ٶȼ������),��̬̽���µ��ٶȹ۲�(Լ���ٶ�),�ش�ʸ���۲�(Լ�������)��
ʵ������������,���ֻ��DZȽ�������̬̽�ⷽ����ȷ�ԡ�
2)���������Ϣ
�˷����ο�
Magnetometer bias insensitive magnetic field matching based on pedestrian dead reckoning for smartphone indoor positioning
���ţ��ʦ�Ŷӵĵش�ƥ�䷽��,�������������е�����,�ں�INS,ZUPT����ϢԴ����ȵ����ش�ƥ��������С,�Ƚ����Ρ���
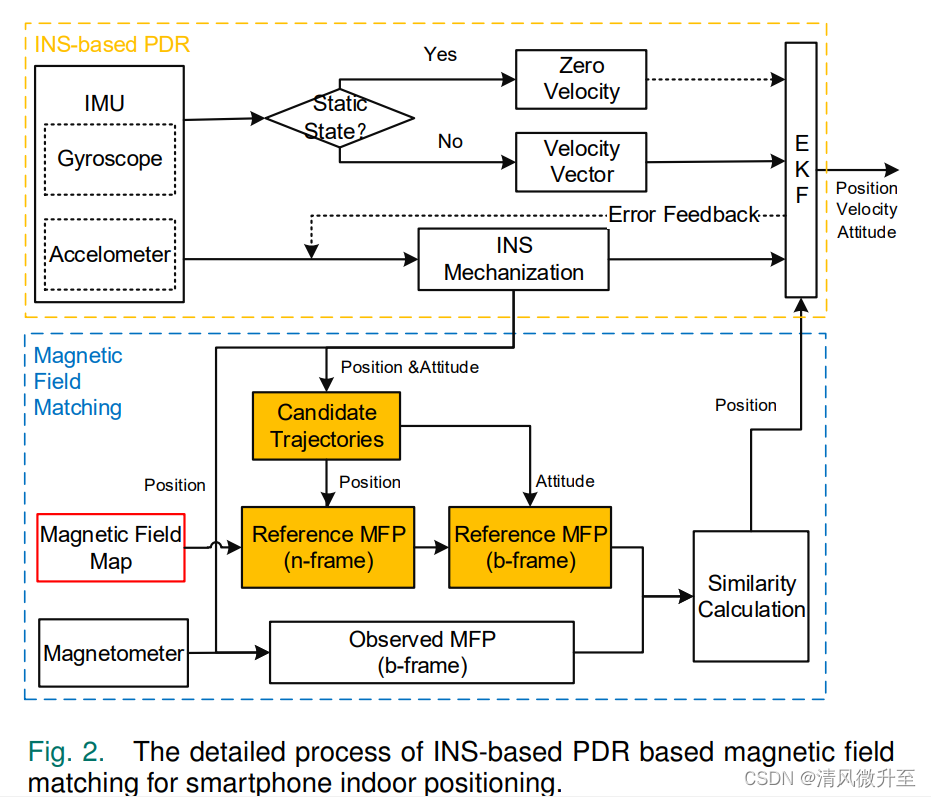
�������ַ���ò�ƶ�������ƽ���ֻ�ΪĬ���ֳ����ơ�
2.2 VDR
�ɲο����ţ��ʦ�Ŷӵ����� �����ֻ����ô������ij�����϶�λ����
�ŶӱȽ���˽,���Ŀ��Թ�������,����!

ֵ��ע�����:
- �������ֻ�������֮������겻������Ϊ��װ���Dz�����״̬���н��й���
- �����кų�0.5m/s��ǰ���ٶȵ�Ԥ��ģ��,�൱�����˽Ϻõ�ǰ���ٶȹ۲�
- �к���DZ仯���Ĺ۲�,�����ƺ���ǵķ�ɢ

