一、典型的视觉SLAM系统
? ? ? ? ?一个典型的视觉SLAM系统主要包含数据处理、初始化、视觉里程计、地图维护、闭环检测等部分。

?1.1 关键技术解析
1)对极约束
对极约束求相机运动的步骤:
1、提取ORB特征,匹配点对
2、根据匹配点对计算基础矩阵 E
3、分解 E,得到相机位姿 R,t
使用估计的 R,t 可以验证各个特征点对的对极约束误差(理论上误差精确为0)
如果匹配存在误匹配的情况,会倾向于使用随机采样一致性(Random Sample Concensus, RANSAC)来求,而不是最小二乘。RANSAC 是一种通用的做法,适用于很多带错误数据的情况,可以处理带有错误匹配的数据
视觉SLAM实践入门――(11)用对极约束求解相机运动_floatinglong的博客-CSDN博客_对极约束求解相机运动
ORB_SLAM3 算法框架解析_墙头玩飞车的博客-CSDN博客_orbslam3框架
二、ORB-SLAM3结构解析
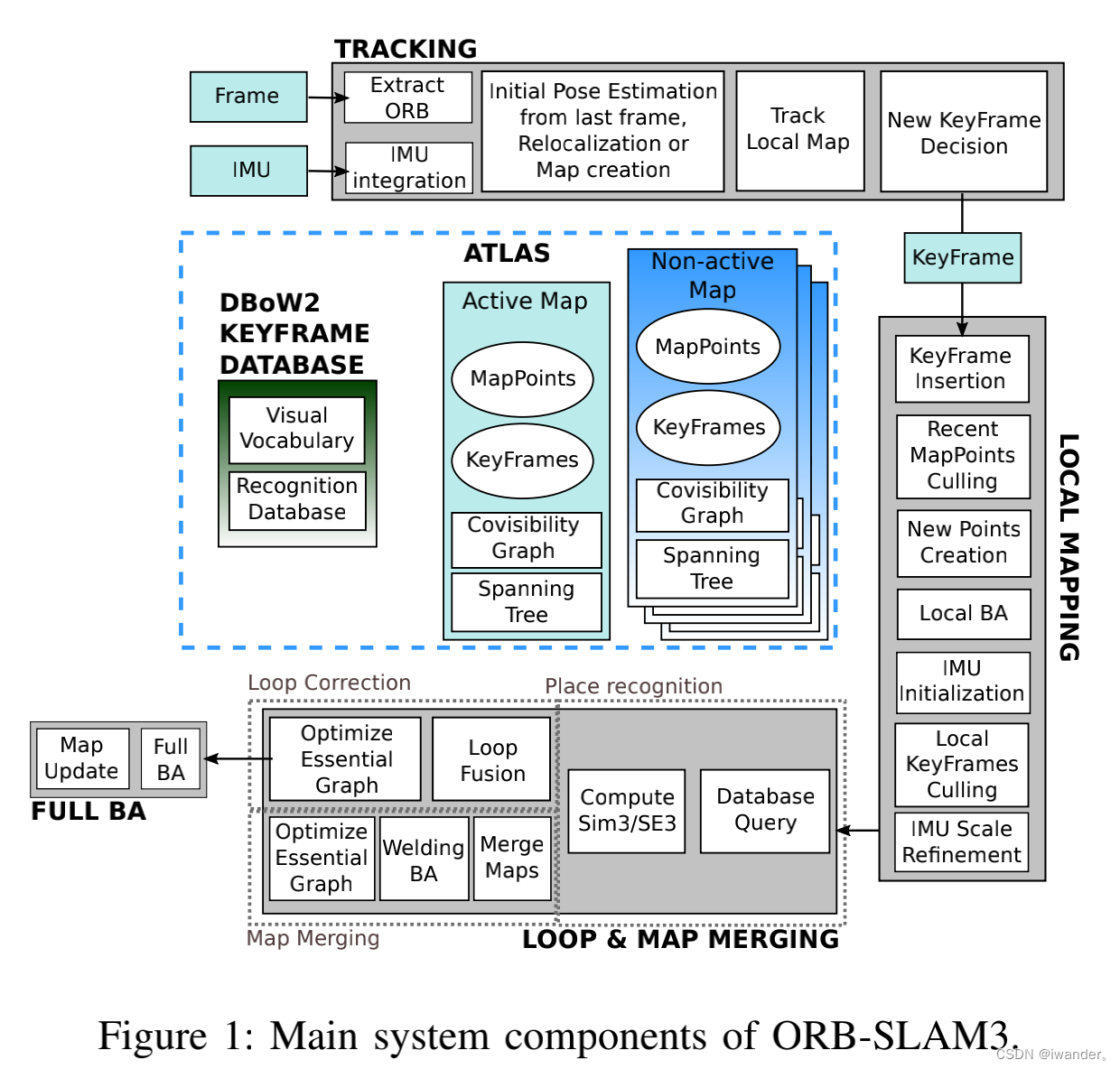
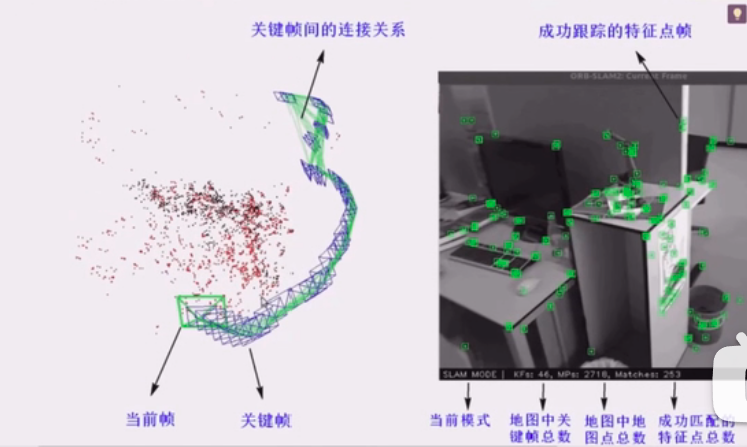
输入【Frame and IMU】:frame可以是单目,双目和RGB-D,外加一个IMU,视觉出来的图像,主要是使用ORB算法进行特征提取,IMU的数据主要是用来做积分。
Tracking :和ORB-SLAM2的第一个区别。在跟踪模块Tracking ,之前是只根据图像视觉的算法做的,在ORB-SLAM3中,计入加入了IMU的作用。
? ? ? ?处理传感器信息并实时计算当前帧在激活地图中的姿态。同时该模块也决定了是否将当前帧作为关键帧。在视觉-惯性模式下,通过在优化中加入惯性残差来估计刚体速度和 IMU 偏差。当追踪丢失时,tracking 线程会尝试在 Atlas 地 图中重定位当前帧。若重定位成功,恢复追踪,并在需要的时候切换激活地图。若一段时间后仍未激活成功,该激活地图会被存储为未激活地图,并重新初始化一个新的激活地图。所以在ORBSLAM3中的地图池中会有激活地图集和非激活地图池。
Local mapping 模块:加入关键帧和地图点到当前激活地图,删除冗余帧,并通过对当前帧的附近关键帧操作,利用视觉 BA 或视觉-惯性 BA 技术来优化地图。此外,在惯性模式下,mapping 线程会利用最大后验估计(MAP)技术来初始化和优化 IMU 参数。
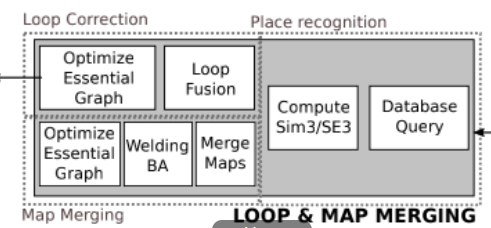
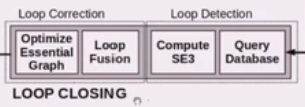
Loop and map merging 模块:每当加入一个新的关键帧,该线程在激活地图和整个 Atlas 地图中检测公共区域。如果该公共区域属于激活地图,它就会执行回环校正;如果该公共区域属 于其他地图,就会把它们融合为一个地图,并把这个融合地图作为新的激活地图。在回环校正以后,一个独立线程就会进行全局 BA,进一步优化地图,同时并不影 响实时性能。ORB-SLAM2该模块结构如下图中的右边的图所示。
? ? ? ? ? ? ? ?
? ? ? ? ? ? ?
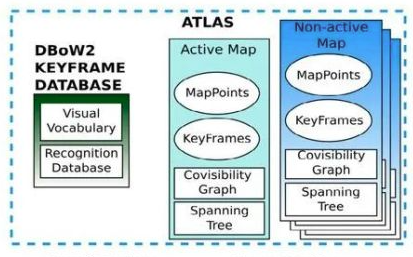
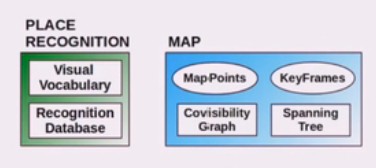
Atlas【地图集】 模块:一个由一系列离散地图组成的多子图系统。分为活跃地图和非活跃地图,当前帧当做活跃地图。如果跟着跟着跟丢了,就将前面的活跃地图转换为非活跃地图。它会维护一个激活地图,用于tracking 线程对当前帧的定位,同时 local mapping 线程会利用新的关键帧信 息持续对该地图优化和更新。在 Atlas 中的其它地图被称为未激活地图。该系统基于词袋模型对关键帧信息建立数据库,用于重定位、闭环检测和地图融合。这里也是一个提升点,ORB-SLAM2该模块如下图中的右边的图所示。
 ? ? ? ??
? ? ? ??
总结:即使在纯视觉下,ORBSLAM3的性能比ORBSLAM2的性能也是提升了很多
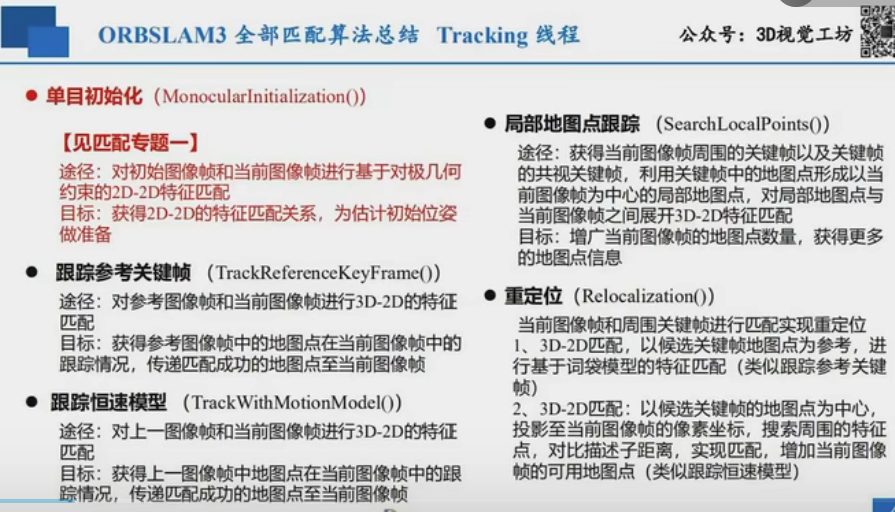
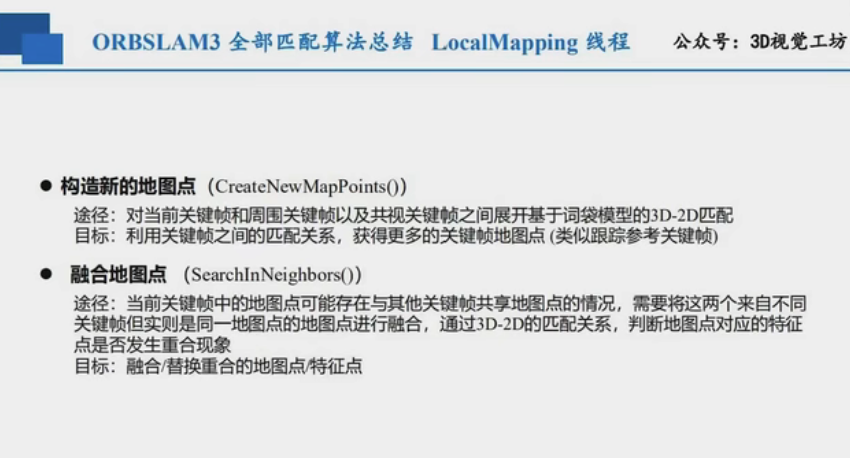
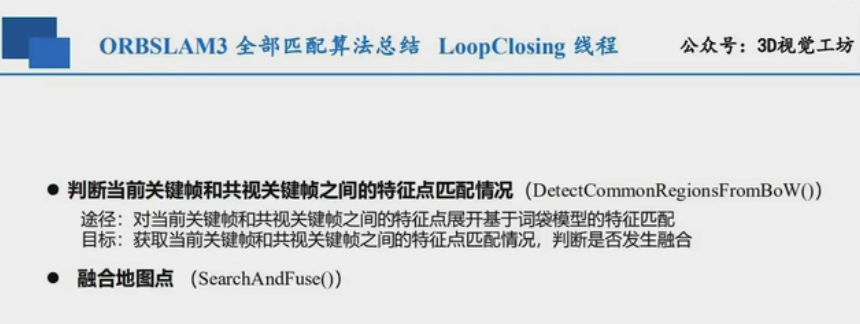
以下是不同的模块,使用的匹配算法的总结:
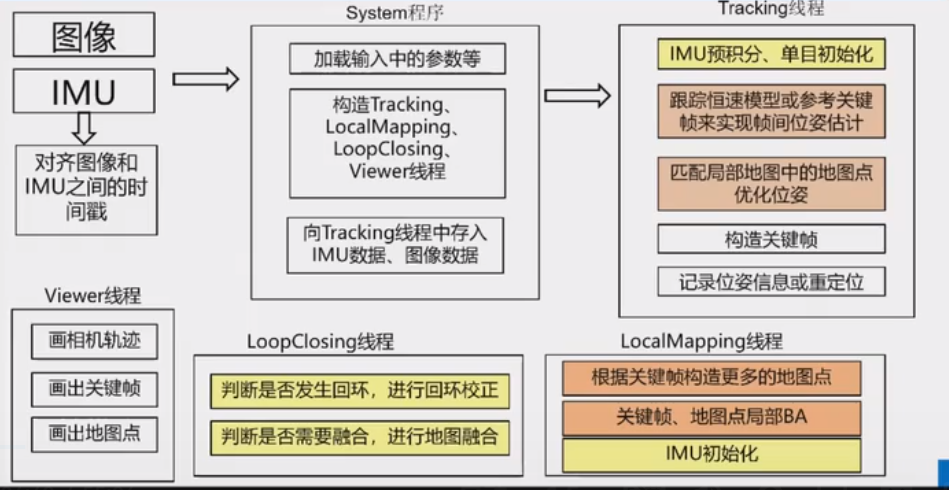
三、代码流程图
三、ORBSLAM3源码解读?
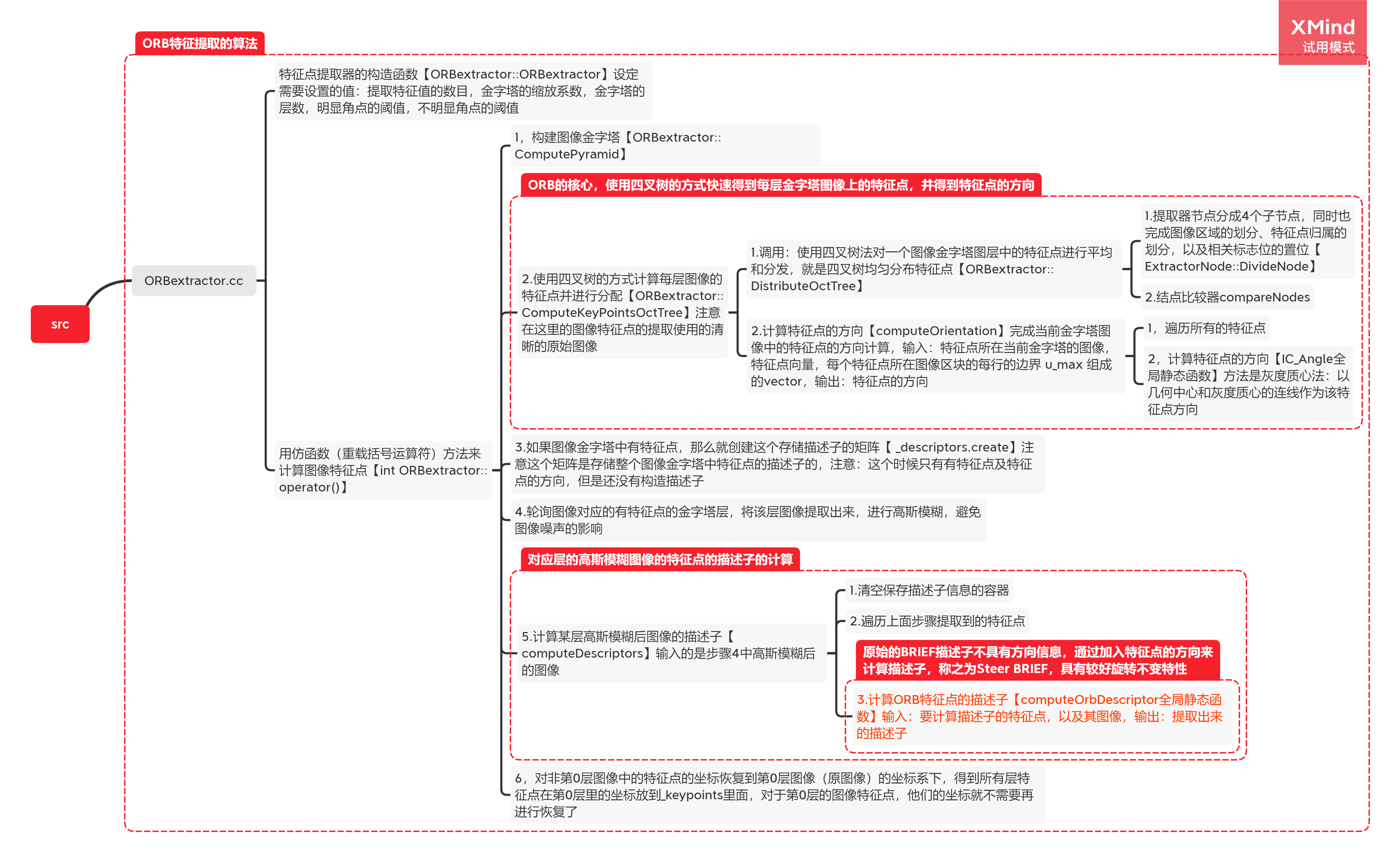
3.1?ORB特征提取