Ŀ¼?
ǰ��
�˴�ʵ�齫�����������̸�궨��������������б궨���������ѱ궨������ָ�����ѽ���1998������ĵ�ƽ�����̸��������궨��������������ķ������ڴ�ͳ�궨�����Ա궨��֮��,���˷��˴�ͳ�궨����Ҫ�ĸ߾��ȱ궨���ȱ�㡣������Ա궨����,����˾���,���ڲ�������������ѱ궨�����㷺Ӧ���ڼ�����Ӿ����档
����
win10,python3.8.5,opencv4.5.3,pycharm,���ڱ궨���ֻ��ͺ�:��ҫ20
һ��ʵ��ԭ��
1.1 ����궨���
��ͼ����������Լ������Ӿ�Ӧ����,Ϊȷ���ռ��������ij�����ά����λ��������ͼ���ж�Ӧ��֮������ϵ,���뽨���������ļ���ģ��,��Щ����ģ�Ͳ�����������������ڴ������������Щ��������ͨ��ʵ���������ܵõ�,����������Ĺ��̾ͳ�֮Ϊ����궨(��������궨)����������ͼ������������Ӿ�Ӧ����,��������ı궨���Ƿdz��ؼ��Ļ���,��궨����ľ��ȼ��㷨���ȶ���ֱ��Ӱ������������������ȷ�ԡ�
1.2 �㷨����
(1)��ӡһ�����̷���ͼ������һ��ƽ����
(2)�Ӳ�ͬ�Ƕ�����������ģ��ͼ��
(3)����ͼ���е�������
(4)�ɼ�������������ÿ��ͼ���е�ƽ��ͶӰ����H
(5)ȷ����������IJ���
1.3?���㵥Ӧ�Ծ���H
��Ӧ��:�ڼ�����Ӿ��б�����Ϊһ��ƽ�浽��һ��ƽ���ͶӰӳ�䡣����ȷ��,ͼ��ƽ����궨�����̸�ƽ��ĵ�Ӧ�ԡ�
����ά��������ĵ�Ϊ ,��ά���ƽ����������Ϊ
,��ά���ƽ����������Ϊ ,���Ա궨�õ����̸�ƽ�浽ͼ��ƽ��ĵ�Ӧ�Թ�ϵΪ:
,���Ա궨�õ����̸�ƽ�浽ͼ��ƽ��ĵ�Ӧ�Թ�ϵΪ:![s0m=**K**[**R**|**T**]**X**](https://img-blog.csdnimg.cn/20190414160948312.png) ?(����,KΪ������ڲξ���,RΪ�ⲿ��������(��ת����),TΪƽ����������:
?(����,KΪ������ڲξ���,RΪ�ⲿ��������(��ת����),TΪƽ����������:
�����̸�λ��Z=0��ƽ��,������ת����R�ĵ�i��Ϊ ri, ����:
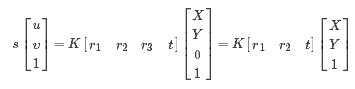
���ǿռ䵽ͼ���ӳ��ɸ�Ϊ:H=��K[r1 r2 t]
����H ������Homographic����,��ͨ����С����,�ӽǵ��������굽ͼ������Ĺ�ϵ��⡣
1.4 �����ڲ�������
���ݲ���1�е�ʽ��,�� H Ϊ?H = [h1 h2 h3],��?[h1 h2 h3]=��K[r1 r2 t],�ٸ���������һ����Լ�����Եõ���ʽ:
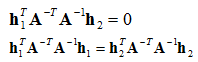
��ÿ����Ӧ�Ծ������ṩ��������,���ڲ����������5������,Ҫ���,������Ҫ3����Ӧ�Ծ���Ϊ�˵õ�������ͬ�ĵ�Ӧ�Ծ���,����ʹ�������������̸�ƽ���ͼƬ���б궨��ͨ���ı������궨��֮������λ�����õ�������ͬ��ͼƬ��Ϊ�˷������,���Ƕ���:

B �е�δ֪���ɱ�ʾΪ6D ���� b,
��H�еĵ�i��Ϊ hi, ,����b�Ķ���,�����Ƶ�����ʽ
,����b�Ķ���,�����Ƶ�����ʽ ,
, ,
,
����Ƶ���:
ͨ����ʽ,���ǿ�֪���۲�ƽ�� n �� 3 ʱ,������3�����̸�ͼ��,���Եõ�b��Ψһ��,�������ڲ�������K��?
1.5 �������������
�ⲿ������ͨ��Homography���,��?H = [h1 h2 h3] = ��A[r1 r2 t],���Ƴ� ?
?
?1.6 �����Ȼ����
�������Ƶ�����ǻ�����������¶���,�����ڿ��ܴ���һЩ��������,����ʹ�������Ȼ���ƽ����Ż�������������n�����̸�ͼ��,ÿ��ͼ����m���ǵ㡣���ջ�õ������Ȼ���ƹ�ʽΪ:
?��������ʵ��
import cv2
import numpy as np
import glob
# �����̸�ǵ�
# ���̸�ģ����(�ڽǵ����,�ڽǵ��Ǻ������������ŵĵ�,��10 X 7)
w = 10
h = 7
# ��������ϵ�е����̸��,����(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),ȥ��Z����,��Ϊ��ά����
objp = np.zeros((w * h, 3), np.float32)
objp[:, :2] = np.mgrid[0:w, 0:h].T.reshape(-1, 2)
# �������̸�ǵ�����������ͼ�������
objpoints = [] # ����������ϵ�е���ά��
imgpoints = [] # ��ͼ��ƽ��Ķ�ά��
# �궨����ͼ��(·������������)
images = glob.glob('D:\\python\\RRJ\\pycharmproject\\img_qipan\\*.jpg')
size = tuple()
for fname in images:
img = cv2.imread(fname)
# ��ͼ��ߴ�,��������Ϊ:���ͼ��,�ߴ�,��x��,y�������ϵ��,INTER_AREA����Сͼ��ʱЧ���Ϻ�
# img = cv2.resize(img, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # ת�Ҷ�
size = gray.shape[::-1] # ����ת��
# �ҵ����̸�ǵ�
# ����ͼ��(8λ�ҶȻ��ɫͼ��) ���̳ߴ� ��Žǵ��λ��
ret, corners = cv2.findChessboardCorners(gray, (w, h), None)
# �ǵ㾫ȷ���
# criteria:�ǵ㾫���������̵���ֹ����(��ֵ)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# ִ�������ؼ��ǵ���
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
objpoints.append(objp)
imgpoints.append(corners2)
# ���ǵ���ͼ������ʾ
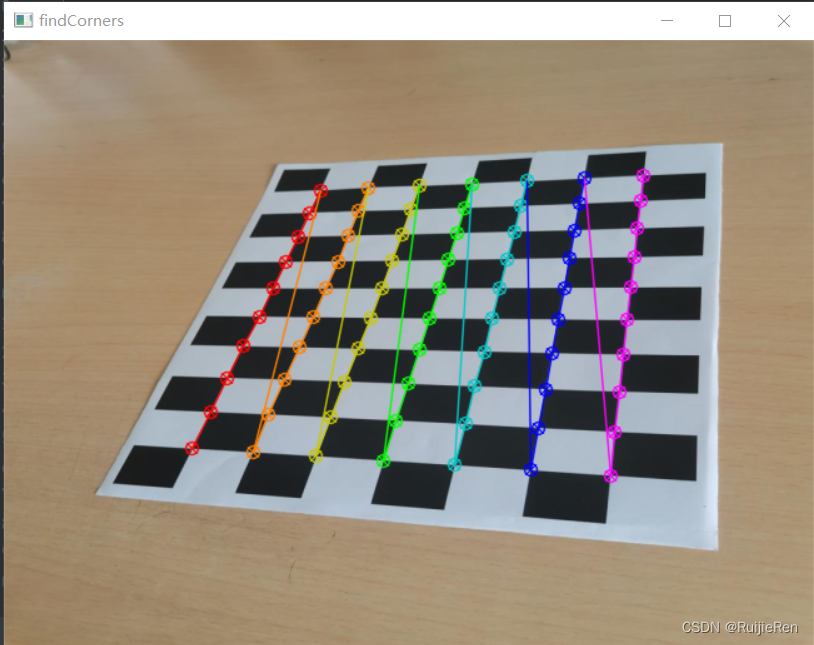
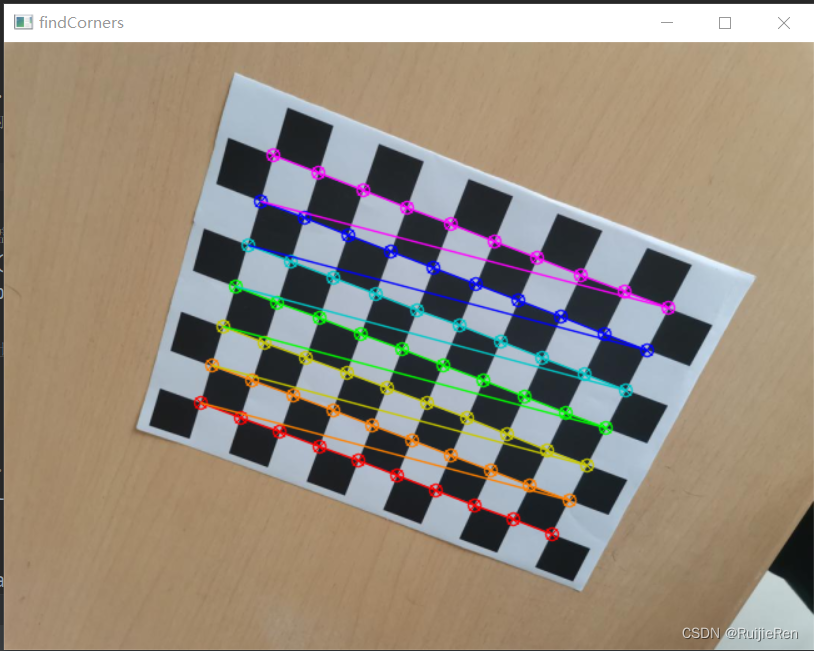
cv2.drawChessboardCorners(img, (w, h), corners2, ret)
cv2.imshow('findCorners', img)
cv2.waitKey(1000)
"""
�궨��ȥ����:
����:��������ϵ���λ�� �������� ͼ������سߴ��С 3*3����,����ڲ������� �������
���:�궨��� ������ڲ������� ����ϵ�� ��ת���� ƽ������
"""
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, size, None, None)
# mtx:�ڲ�������
# dist:����ϵ��
# rvecs:��ת���� (�����)
# tvecs :ƽ������ (�����)
print("ret:", ret)
print("�ڲ�������:\n", mtx,'\n')
print("����ϵ��:\n", dist,'\n')
print("��ת����(�����):\n", rvecs,'\n')
print("ƽ������(�����):\n", tvecs,'\n')
# ȥ����
img2 = cv2.imread('D:\\python\\RRJ\\pycharmproject\\img_qipan\\03.jpg')
h, w = img2.shape[:2]
# ���ǻ�����ʹ��cv.getOptimalNewCameraMatrix()�Ż��ڲ����ͻ���ϵ��,
# ͨ���趨�������ɱ�������alpha����alpha��Ϊ0��ʱ��,
# ���᷵��һ�����ù��Ľ�ȥ�������Ҫ������ȥ�����ڲ����ͻ���ϵ��;
# ��alpha��Ϊ1��ʱ��,���᷵��һ�����������ɫ���ص���ڲ����ͻ���ϵ��,������һ��ROI���ڽ�����õ�
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 0, (w, h)) # ���ɱ�������
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# ����ǰ��ROI����ü�ͼƬ
x, y, w, h = roi
dst = dst[y:y + h, x:x + w]
cv2.imwrite('calibresult.jpg', dst)
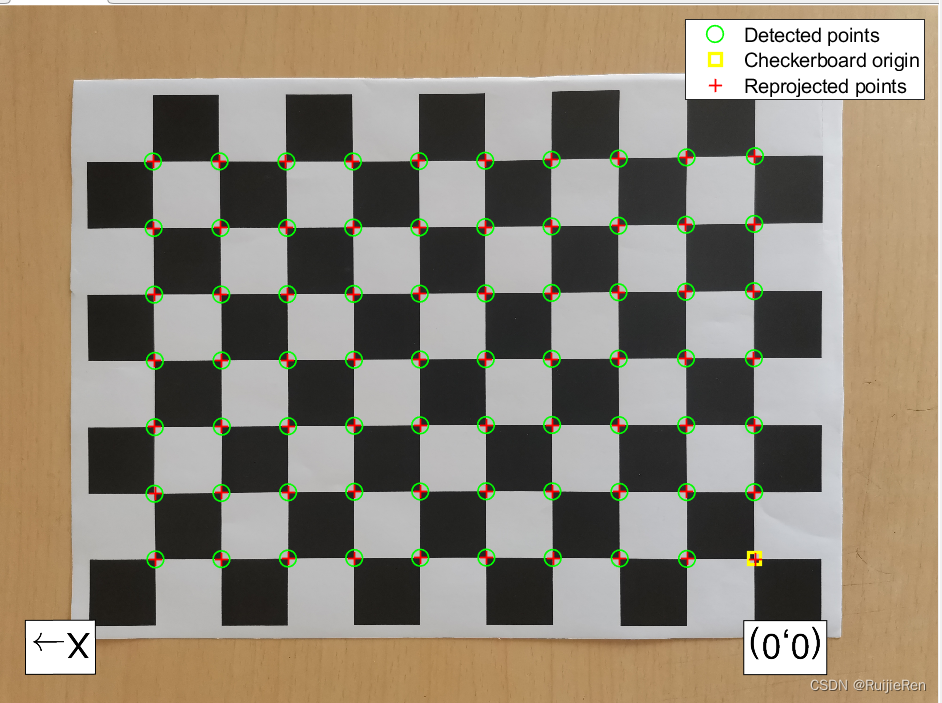
# ��ͶӰ���
# ͨ����ͶӰ���,���ǿ�������������ĺû���Խ�ӽ�0,˵�����Խ���롣
total_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2)
total_error += error
print("total error: ", total_error / len(objpoints))
����ʵ���������
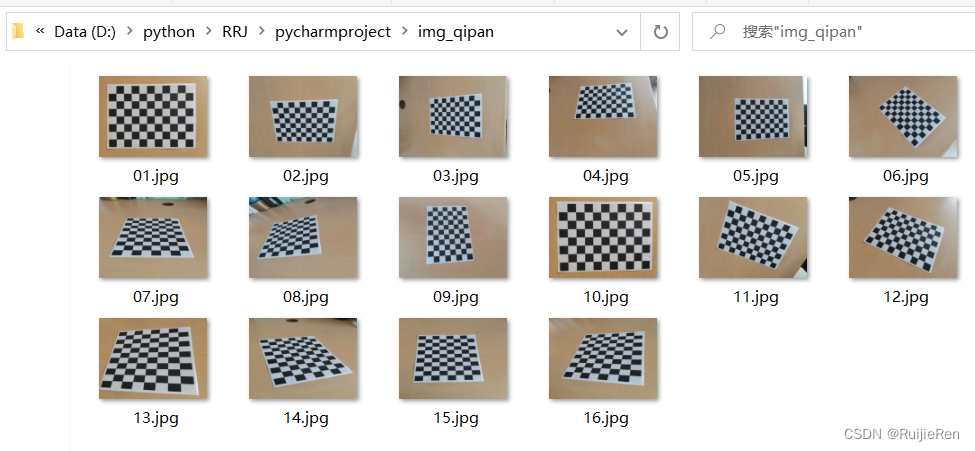
3.1 ���ݼ�
ʹ���ֻ����һ������16�����̸�ͼƬ,ͼƬͳһ�ߴ�Ϊ640 X 480,ֽ�Ŵ�СΪa4,���̸��СΪ11X8������,ÿ�����Ӵ�СΪ20X20mm,ʹ�����ݼ���ʱ��û��ȡ����Ե,��ȡ�ڽǵ�(�ڽǵ��Ǻ������������ŵĵ�)ά��Ϊ10X7��
ע:�����Զ����������̸����վ:Camera Calibration Pattern Generator �C calib.io
3.2 ʵ����
�ǵ�����:
?
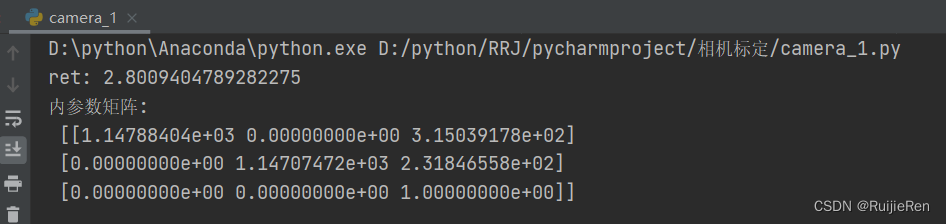
�ڲξ���:
?�������ϵ��:

?����:
��ת����(�����):
(array([[-0.13574861],
[ 0.05697355],
[ 3.13350596]]), array([[ 0.09763508],
[-0.58204812],
[ 3.06407074]]), array([[ 0.6371049 ],
[-0.03960999],
[ 3.06533588]]), array([[-0.18596374],
[-0.84234494],
[-3.02464722]]), array([[-0.41352155],
[ 0.04807884],
[ 3.09358438]]), array([[-0.2764872 ],
[-0.50110721],
[-2.28204581]]), array([[-0.87573537],
[-0.87595743],
[-1.37465394]]), array([[-0.99317253],
[-0.65794883],
[-1.45562632]]), array([[-0.34444459],
[ 0.21117631],
[ 1.49004618]]), array([[-0.23725349],
[-0.01588308],
[ 3.12446843]]), array([[ 0.01333567],
[ 0.4444543 ],
[-2.73788549]]), array([[-0.09230451],
[-0.67340521],
[-2.62675435]]), array([[-0.83846876],
[-0.70618338],
[-1.39987785]]), array([[-0.70346773],
[-1.0445802 ],
[-1.66009963]]), array([[-0.76233494],
[-0.79819236],
[-1.46212885]]), array([[-0.92014765],
[-0.6573154 ],
[-1.30348693]]))
ƽ������(�����):
(array([[ 4.33992147],
[ 3.20461266],
[25.50518027]]), array([[ 4.83495684],
[ 4.30085856],
[36.95686148]]), array([[ 4.38643528],
[ 3.32200755],
[38.92063105]]), array([[ 4.80858473],
[-0.59025077],
[38.33614799]]), array([[ 6.58349275],
[ 3.80278574],
[41.33467124]]), array([[ 2.40987231],
[ 4.346225 ],
[38.21224958]]), array([[-3.09262496],
[ 1.53775077],
[21.28916175]]), array([[-5.01874752],
[ 2.42168125],
[26.88383921]]), array([[ 2.0347435 ],
[-5.05948588],
[38.91132325]]), array([[ 4.86833702],
[ 3.1391252 ],
[24.09973994]]), array([[ 3.53867938],
[ 4.7001667 ],
[34.05130555]]), array([[ 3.45738916],
[ 3.96954972],
[31.61499944]]), array([[-3.64065316],
[ 2.26176972],
[16.30708336]]), array([[-1.80330323],
[ 2.0031509 ],
[19.49963915]]), array([[-3.50827638],
[ 2.30841025],
[22.32331089]]), array([[-3.1779834 ],
[ 1.74494483],
[20.73884832]])) total error:

?��ʵ��������,,��һ������fx=1.14788404e+03(e+03��ʾ10��3�η�.),fy=1.14707472e+03,������(����)������cx=3.15039178e+02,cy=2.31846558e+02,����궨�������0.31,�������Խ���,�����һ���Ľ�;�ӽǵ�ļ��������,��ȷ�ʻ��Ǻܸߵ�,���Ժܺõ�ʶ����ڰ����̸��ϵĽǵ�,����û�д���
����ͨ��MATLAB�Դ��Ĺ������������궨�õ�������������ж���,��Ӧ�ó������ҵ�Camera Calibrator,Ȼ��Add Images����ͼƬ�ļ�,�ڵ��������Լ������̸�ߴ�(ͼƬ�ߴ��СҪͳһ),Calibrate�궨�Ϳ����ˡ��������ָ�ϼ�:(1����Ϣ) ����궨(Camera calibration)ԭ��������_AI�˹����ܿ�ѧ�IJ���-CSDN����_cmos����궨
�ǵ���:
�������:
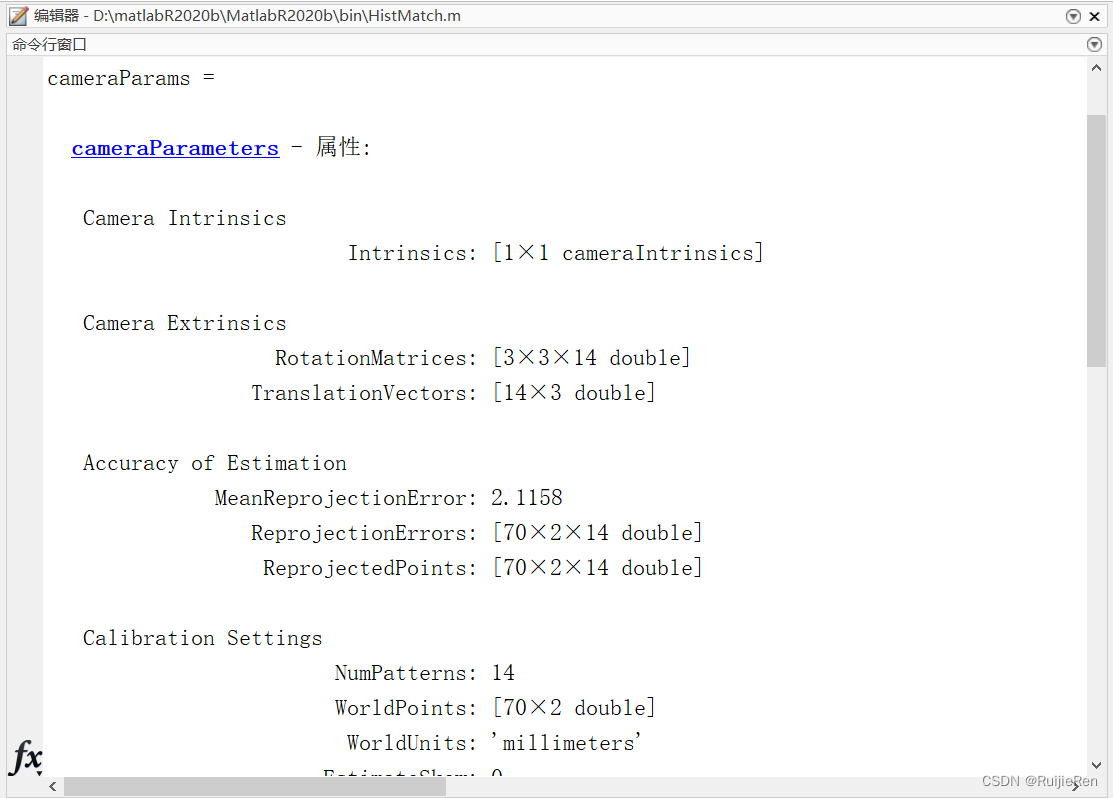
�������������������ɻ���ڲξ���;������:
�ڲξ�������:cameraParams.IntrinsicMatrix
�����������:cameraParams.RadialDistortion
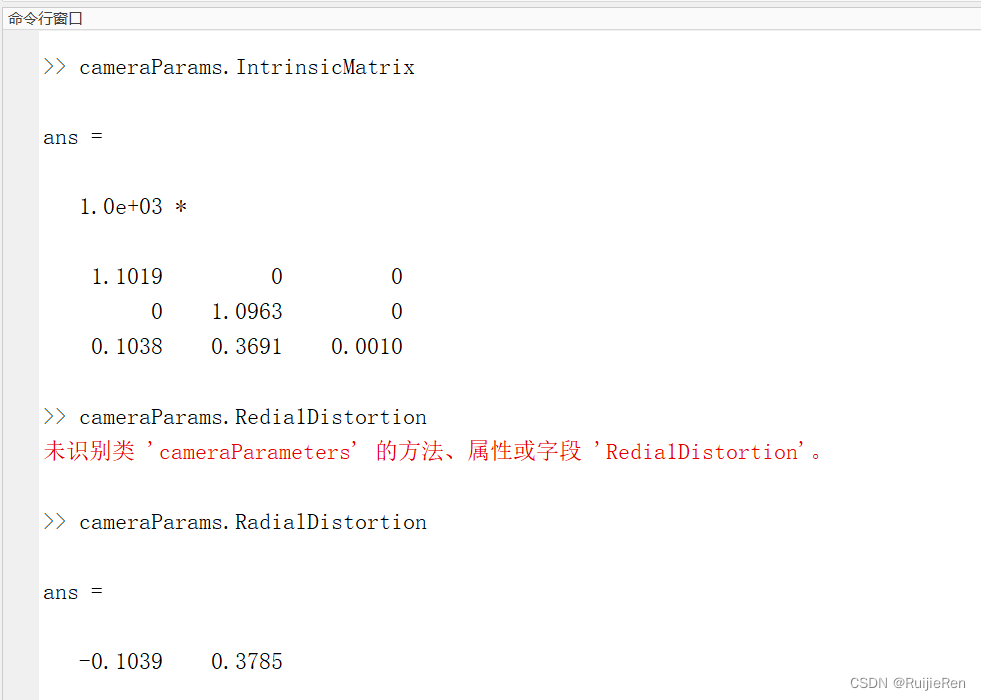
?Matlab�õ������ڲξ����ת�þ���,��һ������fx=1.1019e+03,fy=1.0963e+03��
���Կ�������ͦ���,�ձ���ΪMatlab�õ������ڲξ����Ϊ�ɿ���
��ͼƬ��СΪ(1080 X 810)�ٴβ���:
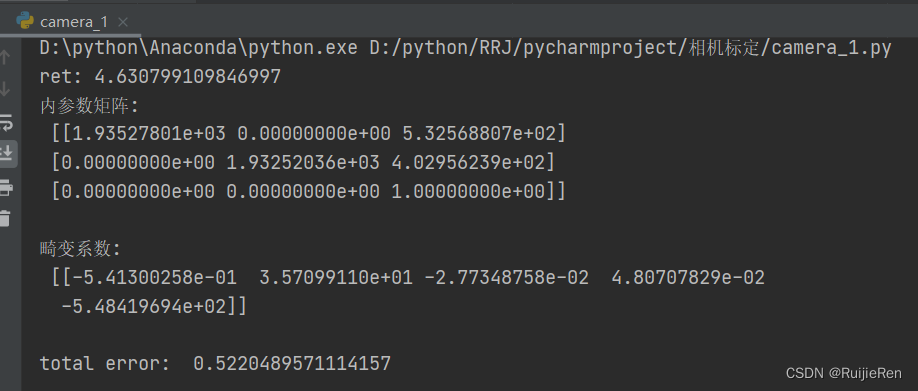
?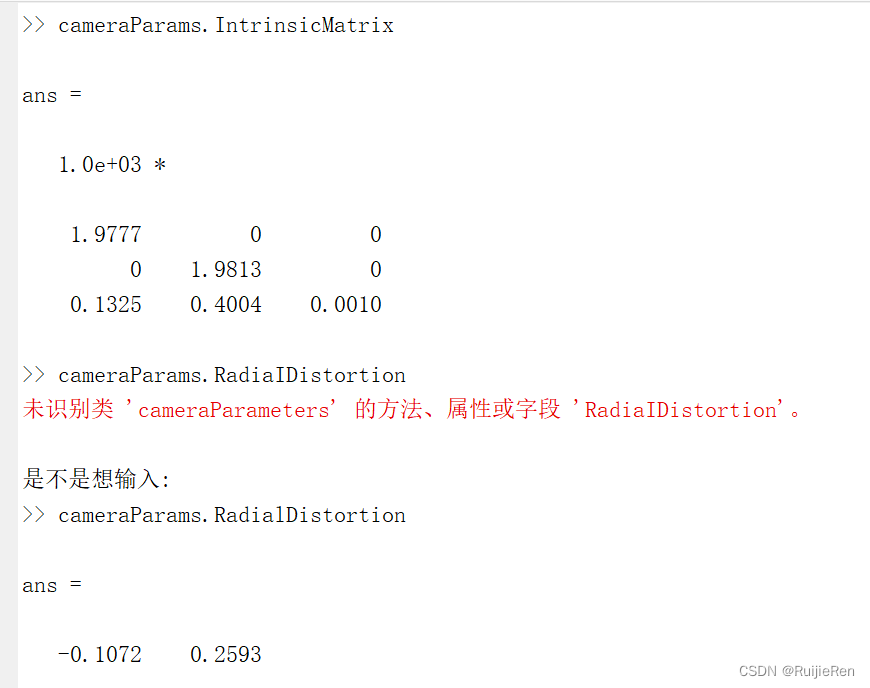
?���Կ���ͼ��ѹ��������� fx ֮��������������,���Ƿ�ͶӰ���ȴ��������˾�������ͼ��ѹ����С������»�õ��ȽϺõĽ����
�ܽ�
�����
(1)(1����Ϣ) python������Ӿ�-ͼ��������֮����궨_�ҳ���Debug�IJ���-CSDN����_python����궨
(2)(1����Ϣ) ��������Ӿ������������̸�궨��_Rolla_�IJ���-CSDN����_���̸�궨

