ROS����������ģ��
����Ŀ¼
�����Ҳμ��˵�ʮ�߽�ȫ����ѧ��������������Ѷ��-��ͥ�����������ս��,Ŀǰ���Ƕ��Ѿ�����˳��ش����������,���������Ĺ���Ҳ����֤���,�����������Ӿ������д�Լ�ROS��ع���ʵ��,���оͰ�����������������,����,������+�����Ļ�����Ҳ��Ҫʵ���������ܡ����,ʵ��ROS�������������ܵ�������������ҵļ��ϡ�
Ŀǰ,���ҵ�������ģ������ĵ�����������˷����п������ĵ���,���ĵ����������ƴ�Ѷ�ɻ�������˷����е�ʹ�÷���,�����������ѡ���Դ��λ��������ȡ������ʶ���Ӧ�õ�ʵ�ַ�ʽ���ϻ�����˵,ֱ�ӿ��ɿ�!
�� �������Գ۳���,���������·
��˷����м��:

-
��˷���������һ����Ŀ����ѧ������(һ��Ϊ��˷�)���, �������Ŀռ����Խ��в�����������ϵͳ������Ҫ��������Դ��λ,���Ʊ������������š����졢����,�ź���ȡ����롣����,��Դ��λ��ָ������˷����м�����Դ���еĽǶȺ;���,����TDOA(Time Difference Of Arrival,����ʱ���)ʵ�ֶ�Ŀ����Դ�ĸ���;�źŵ���ȡ�������ָ��������������Ч���γ�һ������,��ʰȡ�����ڵ��ź�,�Ӷ��ﵽͬʱ��ȡ��Դ������������Ŀ�ġ�
-
��˷��һ��ʹ������:�� ��˷����������빤��״̬ �� ������˷��������,�ɻ��ѻ��ֶ����� �� ��ȡ������Ƶ����ʶ���������ʶ��ʹ���
��ע:����˷�������,һ��ָ��һ��������ʵ��ָ������������ǿ,�����������Ƶ�Ŀ��,�ҽ�����Ƶ�Ļ�ȡҲ���ڸ���������δ������������,���������,���ȡ���Ľ�����Ƶ��һ������˵������,��ʱ���ɵĽ�����Ƶ���ܲ������ŵġ�
Ҽ ·��������Զ��,�Ὣ���¶�����
Linux-SDK:
- �������ܳ�����������˷����а���ϵͳΪLinux,�û�����ʹ����һ����Linuxϵͳ����������ͨ��,��������˷�����֮���ͨ�ŷ�ʽΪ����USB���Զ���ͨ��Э�顣������ЩЭ��,�û������������˽���������˷�忪������ȡ��Ƶ������������ȡ���ѽǶȵȲ�����Ϊ����ʹ��,���α���������˷������䱸SDK,��Ҫ��һЩЭ�������API��װ
[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-mBRPthll-1652716821228)(https://gitlab.com/Muscularmonk/project_01/uploads/aa51e6b68a79d573dab694dcb9a8f353/2.png)]
- ��sdk������ϵͳ��һĿ¼,�л�����Ŀ¼,���Կ���
sdk-vvui�Լ� ros �ж�Ӧ�Ĺ��ܰ���vvui_ros-master������ʹ����δ���ñ���˷��udev����,����������²���:(ע:xf_mic.rulesλ�ڸ�Ŀ¼)
sudo cp xf_mic.rules /etc/udev/rules.d # ��
sudo service udev restart # ������udev����
# �������豸������˷��豸
-
��SDK�ļ���
config��������ļ�,����call.bnf���û��Զ���������������ļ�,�ɸ��ݳ������и���,����Ҫ����bnf�����������ؼ�����,��Ҫ�ȹ����,��ָ��ʹ�õ�� -
SDK���ɷ�ʽ:
���Ƚ�������(����linuxϵͳ��PC��ARM��),��SDK�������Զ����Ŀ¼��,�л�����Ŀ¼,ִ����������,
tar xvf vvui.tar.gz
sudo apt-get install libasound2-dev # ��װ��Ҫ��������
sudo apt-get install sox # ��װ��Ҫ����Ƶ���ſ�
sudo apt-get install mplayer # ��װ��Ҫ����Ƶ���ſ�
# ����˷�����ͨ��USB�ڲ嵽������,Ȼ����ն�,ִ����������
lsusb # �鿴�Ƿ���豸,����VID:PIDΪ10d6:b003���豸,���ȡ�ɹ�
�� ���������Ŋ�����Ҫ��,���������
�������ܲ���:
- ��̬������:
cd ./vvui/lib
��������X64����ϵͳ,��ִ��:
cd x64 && sudo cp lib* /usr/lib
��������arm64����ϵͳ,��ִ��:
cd arm64 && sudo cp lib* /usr/lib
��������arm32����ϵͳ,��ִ��:
cd arm32 && sudo cp lib* /usr/lib
- ���ɿ�ִ���ļ�:
cd vvui/sample/mic_demo_sample
��������X64����ϵͳ,��ִ��:
sh ./x64bit_make.sh
��������arm64����ϵͳ,��ִ��:
sh ./arm64_make.sh
��������arm32����ϵͳ,��ִ��:
sh ./arm32_make.sh
- ����:
cd ../../bin
sudo ./mic_demo_sample
���������,����ʾ���ɹ�����˷��豸��,���渽��1-11����
��ע:����ʱ���ƪ������,���������ʶ�����������˻������������ڴ˴���¼,����Ҫ��uu������������ĵ�,���в鿴��
�� ����֪��������,���������ŷ�
��˷����ROS�ӿ�ʹ�ò���:
- ���������:
�� vvui_ros-master ���ŵ���һROS�����ռ��srcĿ¼��,��������ƽ̨�Ĺ��ܰ���CmakeLists.txt�ļ�,��ַΪ /�����ռ���/src/vvui_ros-master,����������,��ΪNvidia Jetsonƽ̨,����Ϊ lib/arm64
link_directories(
lix/x64
)
Ȼ���л����ù����ռ�,ֱ�� catkin_make,������ɺ�,ִ����������ʹ�����ռ���Ч:
echo "source ~/�����ռ���/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
���ر������ն�
- udev rules ���:
sudo service udev restart # ����udev����
����ٲ����˷缴��
�� ���������δ����,������֮�ɳ�
������[Ѷ�ɿ���ƽ̨](Ѷ�ɿ���ƽ̨-����������Ϊ���ĵ��˹����ܿ���ƽ̨ (xfyun.cn))ע���˺�

Ȼ�������Ͻǡ�����̨��

�������̨��,����ǵ�һ��ʹ��,�����̨�ǿյ�,���������Ӧ��
[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-shBspENP-1652716821230)(https://gitlab.com/Muscularmonk/project_01/uploads/02b0e8f91058eb7ca45a1142ab87b5fb/5.png)]
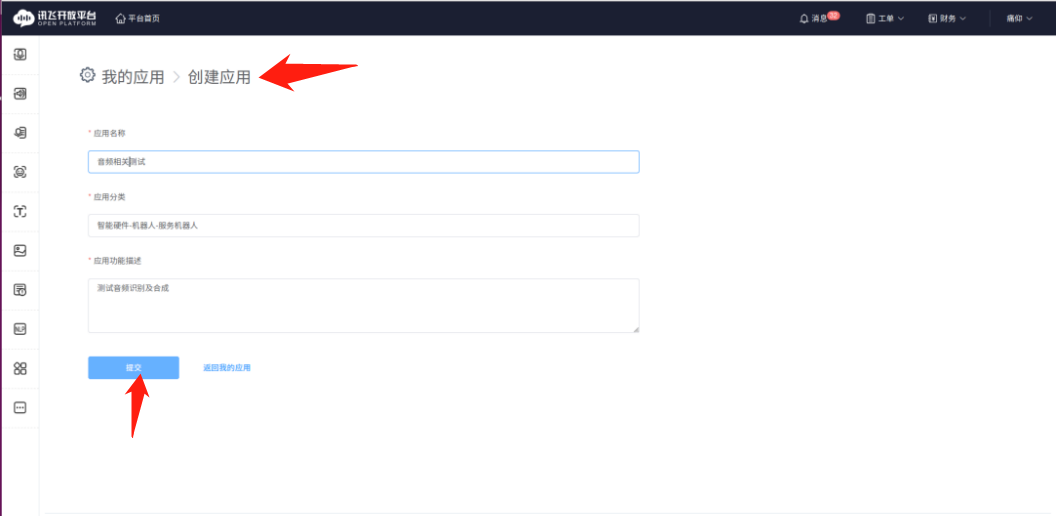
�ύ����Կ����û�Ӧ���б�,ѡ��մ�����Ӧ��,����Ӧ�����ý��档���žͿ�������sdk���ˡ�
��ע:����ʱ���ƪ������,���������ʶ��ͼ���AIUI���ڴ˴���¼,����Ҫ��uu������������ĵ�,���в鿴��
ĩ ������֮������,���������δ��
| �������� | ������������ |
|---|---|
| �Ҳ�����˷��豸 | ϵͳδ����˷� |
| ��������ֱ����segment fault���� | ����Ƿ�������˷�udev���� |
| ���������libcjson.so.1������ | ��Ҫ��װ cjson,�ҽ�/usr/local/lib�е�libcjson.so.1�ƶ���/usr/lib�� |
| 23300��bnf_recognise_error | ���������ʶ��ʱ bnf �����,�������š��۶�����Ƿ����� |
| 10407��unfit_appid_and_lib_error | appid�붯̬�� libmsc.so ��ƥ�� |
| 10102��build_grammer_error | ���������ʶ�������,common.jet ��Դ�ļ�·������,������Ϊ����·�� |
| 11210 | appid��������Դ common.jet ��ƥ�� |
| 11201 | ����ҵ������������Դװ�������� |
| �ļ����� | ȷ����Ƶ�ļ��Ƿ��ж�дȨ�� |
| ��������ʱһֱ��ʾ��˷�δ���� | ����Ƿ��п���¼����δֹͣ¼���IJ���������,�����ֶ�ֹͣ¼����Ͽ�����˷������ |

