船载导航雷达可以测量海上物标及运动目标的距离和方位,并可以精确地预测和判断出运动目标下一步的运动动态,对本船与周围运动目标会遇态势下可能发生的碰撞危险进行判断和评估,辅助拟定本船的最佳避让策略,从而增强避碰辅助决策能力。
电子海图系统可显示来自系统电子导航海图的选定信息和导航传感器的导航信息,以辅助驾驶员进行航线设计和航线监视,保证船舶航行安全。以电子海图为航行信息核心,实现与雷达、GPS、计程仪、测深仪、AIS等各种设备的信息融合,是电子海图信息系统的发展趋势。
通过雷达图像与电子海图图像叠加,海图背景、本船船位以及本船周围目标的组合显示构成了安全航行所需的全部组合信息,使得浅滩或海底障碍物所引起的危险以及来自海上的危险目标都清晰可见。雷达图像与电子海图的组合,实现了雷达视频数据的共享以及综合航行态势图的实时生成和显示,允许操作人员在同一个显示器上观察本船周围的全部态势,能集中精力判断并采取适当的行动,可以提高船舶避碰能力,这对船舶的航行,特别是大雾天气中的近海航行具有重要的意义。
目前国外部分产品已经实现了雷达和电子海图图像叠加的功能,而国内在这方面的研究比较少。本文根据电子海图和雷达图像的显示特点,提出了一种雷达和电子海图图像叠加方法。
1.雷达和电子海图图像叠加
通过视频采集卡对雷达的视频图像进行采集,获取雷达图像,作为与电子海图叠加显示的图库。以本船位置为参考点,正北向为参考线,对电子海图和采集到的雷达图像进行处理。根据雷达的扫描半径,通过墨卡托投影变换,获取电子海图的显示范围和比例尺;通过对雷达图像和电子海图的几何变换实现雷达和电子海图的匹配。
根据雷达图像的显示方式,对视频图像区的颜色值进行判断。按顺序提取图像中每一个像素点的颜色值,并判断获取的像素颜色值是否跟雷达目标图像的颜色系一致,一致则表明该像素点为目标回波。在雷达图像和海图图像匹配的前提下,将电子海图相应位置的像素颜色值转换为雷达图像该像素点的颜色值。重复以上操作直至将整个雷达视频图像扫描完成。
雷达和电子海图的视频图像都是实时更新的,所以系统必须不断的进行重绘。为了达到平滑且无明显闪烁的系统效果,采用了双帧显示方法,使用前缓存和后缓存两个缓存进行图像的显示,前缓存用于显示,后缓存用于绘制,前缓存可见,后缓存不可见,在后缓存绘制完成之后,实现前后缓存的切换,达到平滑无闪烁的目的。
雷达和电子海图图像叠加,需要的条件是:
1)GPS提供本船的经纬度坐标,作为雷达和电子海图图像叠加的参考点。
2)雷达图像存在船艏向上、真北向上和航向向上三种显示方式,电子海图一般为北向上的显示方式。因此需要罗经提供正北信息,作为雷达和电子海图图像叠加的参考线,及雷达图像角度调整的依据。
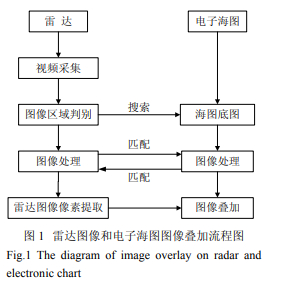
雷达图像和电子海图图像叠加可以分为雷达图像采集、区域判别、图像匹配、视频图像的处理和图像的叠加等部分,整个流程如图1所示。
2.雷达和电子海图图像匹配模型
2.1.海图显示区域的确定
地球是一个椭球体,将一个椭球体放到直角坐标系中显示,必须进行投影变换。一般使用的投影变换包括墨卡托投影变换,高斯投影变换等。墨卡托投影变换的计算复杂程度较低,在较小的范围内具有较高的精度值。雷达的扫描范围一般在96nmile以内,相对较小,因此这里采用的是墨卡托投影变换。
大地坐标转换为墨卡托投影的变换公式:
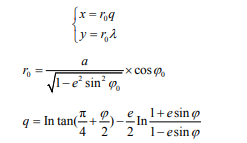
式中,x、y为墨卡托直角坐标(单位:m),λ和?为地球坐标系的经度和纬度,a为地球椭球长半径,e为地球的第一偏心率,?0为基准纬度,q为等量纬度,0r为基准纬度圈的半径(单位:m)。
根据海图要素的投影变换可以得到雷达扫描的经纬度范围:式中,λ00、?为雷达中心的经度和纬度,minmin(,)λ?、maxmax(,)λ?为雷达扫描的经纬度范围,
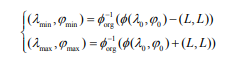
00φ(,)λ?为雷达的中心经纬度的直角坐标,φ()i为海图投影映射的墨卡托转换方程,1φ()?i为海图投影映射的墨卡托转换方程的逆,L为雷达量程。根据计算出的经纬度范围搜索满足显示需要的海图。
2.2.电子海图显示比例尺
雷达和电子海图实现叠加,它们的比例尺必须一致。雷达图像的比例尺变化是通过雷达几个量程的变化实现,而电子海图基本上具有任意缩放的特点,因此,可以通过对电子海图的缩放得到合理的比例尺,实现雷达和电子海图图像的比例尺匹配。
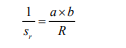
雷达的探测半径为R,半径的扫描像素为a,点距为b,则雷达图像的比例尺1rs可以简单的表示为:
电子海图的原始比例尺为01s,则其缩放比参数z为[5
2.3.图像的处理
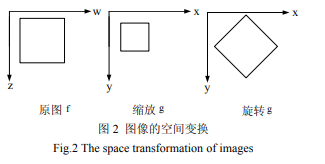
以本船的正北向为参考,根据雷达的显示方式适当的对雷达图像进行几何变换,与电子海图实现匹配。电子海图的缩放,通过仿射变换来完成,按比例缩放、旋转、平移或者剪切一些点等。一幅定义在直角坐标系(w,z)的图像f经过几何变形后产生了定义在直角坐标系(x,y)上的图像g,如图2所示,通过仿射变换矩阵进行坐标转换:
3.仿真及结果分析
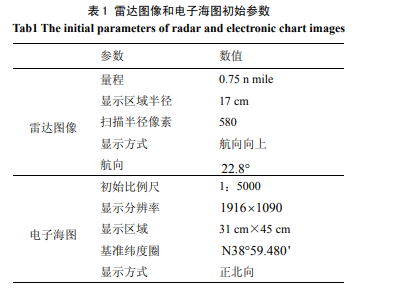
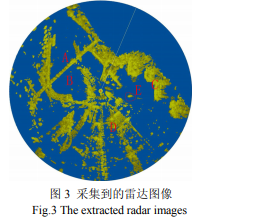
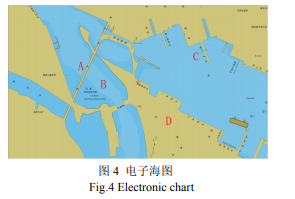
仿真数据来源是2008年12月份在塘沽进行的试验的结果。试验地点为:交通部北海救助局天津基地。经度和纬度分别为N3859.2807'°、E11742.8741'°。试验目的是录取雷达数据资料,为实验室试验提供数据资源。试验所用雷达收发机为美国SPERRY公司的RACAL-DECCA雷达,后端的信息处理为挪威Vissim公司后端雷达信号处理设备。采集雷达视频图像,采集到的雷达图像如图3所示。试验中使用的电子海图如图4所示。雷达图像和电子海图的主要参数见表1。图4中A代表海河大桥;B代表海河大桥附近的海岸线及轮廓;C代表的是海河入海口处的海岸线,为停靠码头;D代表的是海河入海口处的陆地区域;E为雷达扫描到的动态目标。
通过式(4)对表1参数的解算求得所需要电子海图的显示区域为以N3858.5307'°、E11742.1241'°和N390.0307'°、E11743.6241'°为对角线的矩形区域内;通过式(5)和式(6)求得电子海图的缩放比为1.79,从而得出电子海图的显示比例尺为1:9000时,可以基本实现雷达图像和电子海图的大小匹配;通过式(7)对雷达图像进行角度调整,实现雷达图像和电子海图在方位上的匹配。根据图像的RGB显示原理,确定黄色系为雷达目标色系,对雷达图像的逐个像素进行分析处理,并将目标色系像素点叠加到电子海图上,叠加完成后,将结果进行显示,仿真过程所用时间为0.125s。仿真结果如图5所示。
从图5可以看出,雷达扫描到的海河大桥和电子海图相应区域(A区域)基本吻合,海河大桥附近的海岸线及轮廓和电子海图相应区域(B区域)也是匹配的;在图像的右侧可以明显看出岸边(C区域)具有较多的目标存在,这是由于试验地点是码头,有很多的船舶停靠;由于航海雷达对于陆地目标的探测能力较差,杂波比较多,这从D区域中可以明显显现出来;雷达捕捉到的动态目标E在叠加图像上能够实时显示。结果表明,雷达和电子海图图像是匹配的,雷达扫描图像和电子海图海岸轮廓融合程度较好,雷达捕捉到的目标能够在叠加图像上实时显示,使操作人员对于船舶周围的环境状态一目了然,提高船舶避碰能力。
4.结论
本文提出了一种雷达和电子海图图像叠加的方法。根据雷达和电子海图的显示特点,通过墨卡托投影变换,获取电子海图的显示范围和比例尺;通过对雷达图像和电子海图的几何变换实现雷达和电子海图的匹配,以电子海图为底图,实现了雷达和电子海图图像的叠加。仿真结果表明,该方法能够较好地实现雷达和电子海图的匹配,通过雷达和电子海图信息的融合,提高了操作人员对船舶周围环境的监控能力。本文提出的雷达和电子海图图像叠加方法是可行的,推导的雷达和电子海图图像匹配模型满足工程应用的需要,但应按照工程标准,进一步进行改进.? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?参考文章:电子海图、AIS、雷达

