ИДЯА
(1)ЬнЖШ: ЬнЖШЕФБОвтЪЧвЛИіЯђСП(ЪИСП),БэЪОФГвЛКЏЪ§дкИУЕуДІЕФЗНЯђЕМЪ§бизХИУЗНЯђШЁЕУзюДѓжЕ,МДКЏЪ§дкИУЕуДІбизХИУЗНЯђ(ДЫЬнЖШЕФЗНЯђ)БфЛЏзюПь,БфЛЏТЪзюДѓ(ЮЊИУЬнЖШЕФФЃ)
(2)ЯпадТЫВЈ ПЩвдЫЕЪЧ ЭМЯёДІРэ зюЛљБОЕФЗНЗЈ,ЫќПЩвддЪаэЮвУЧЖдЭМЯёНјааДІРэ,ВњЩњКмЖрВЛЭЌЕФаЇЙћЁЃ
вЛЁЂБпдЕЬсШЁ
1ЁЂЪВУДЪЧБпдЕ?
??ЭМЯѓЕФБпдЕЪЧжИЭМЯѓОжВПЧјгђССЖШБфЛЏЯджјЕФВПЗж,ИУЧјгђЕФЛвЖШЦЪУцвЛАуПЩвдПДзїЪЧвЛИіНздО,вЛИіЛвЖШжЕдкКмаЁЕФЛКГхЧјгђФкМБОчБфЛЏЕНСэвЛИіЛвЖШЯрВюНЯДѓЕФЛвЖШжЕЁЃ
??БпдЕгае§ИКжЎЗж,ОЭЯёЕМЪ§гае§жЕвВгаИКжЕвЛбљ:гЩАЕЕНССЮЊе§,гЩССЕНАЕЮЊИК.
??ЧѓБпдЕЗљЖШЕФЫуЗЈ: sobelЁЂ RobertsЁЂ prewittЁЂ LaplacianЁЂ CannyЫузг,CannyЫузгаЇЙћБШЦфЫћЕФЖМвЊКУ,ЕЋЪЧЪЕЯжЦ№РДгаЕуТщЗГ
2ЁЂЪВУДЪЧБпдЕЬсШЁ?
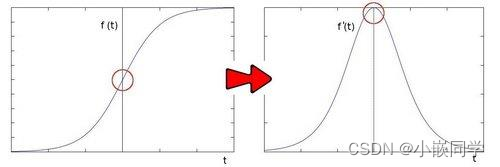
БпдЕЬсШЁ,жИЪ§зжЭМЯёДІРэжа,ЖдгкЭМЦЌТжРЊЕФвЛИіДІРэЁЃЖдгкБпНчДІ,ЛвЖШжЕБфЛЏБШНЯ
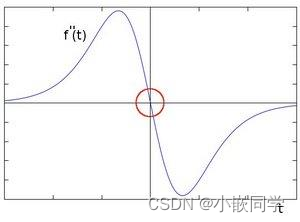
ОчСвЕФЕиЗН,ОЭЖЈвхЮЊБпдЕЁЃвВОЭЪЧЙеЕу,ЙеЕуЪЧжИКЏЪ§ЗЂЩњАМЭЙадБфЛЏЕФЕуЁЃЖўНзЕМЪ§ЮЊСу
ЕФЕиЗНЁЃВЂВЛЪЧвЛНзЕМЪ§,вђЮЊвЛНзЕМЪ§ЮЊСу,БэЪОЪЧМЋжЕЕуЁЃ
БпдЕЬсШЁ:БпдЕМьВтЕФЛљБОЫМЯыЪзЯШЪЧРћгУБпдЕдіЧПЫузг,ЭЛГіЭМЯёжаЕФОжВПБпдЕ,ШЛКѓ
ЖЈвхЯѓЫиЕФЁАБпдЕЧПЖШЁБ,ЭЈЙ§ЩшжУуажЕЕФЗНЗЈЬсШЁБпдЕЕуМЏЁЃгЩгкдыЩљКЭФЃК§ЕФДцдк,МрВтЕН
ЕФБпНчПЩФмЛсБфПэЛђдкФГЕуДІЗЂЩњМфЖЯЁЃвђДЫ,БпНчМьВтАќРЈСНИіЛљБОФкШн:(1)гУБпдЕЫу
згЬсШЁГіЗДгГЛвЖШБфЛЏЕФБпдЕЕуМЏЁЃ (2)дкБпдЕЕуМЏКЯжаЬоГ§ФГаЉБпНчЕуЛђЬюВЙБпНчМфЖЯЕу,
ВЂНЋетаЉБпдЕСЌНгГЩЭъећЕФЯпЁЃ
БпдЕЖЈвх:ЭМЯёЛвЖШБфЛЏТЪзюДѓЕФЕиЗН(ЭМЯёЛвЖШжЕБфЛЏзюОчСвЕФЕиЗН)ЁЃЭМЯёЛвЖШдкБэ
УцЗЈЯђБфЛЏЕФВЛСЌајдьГЩЕФБпдЕЁЃвЛАуШЯЮЊБпдЕЬсШЁЪЧвЊБЃСєЭМЯёЕФЛвЖШБфЛЏОчСвЕФЧјгђ,ет
ДгЪ§бЇЩЯПД,зюжБЙлЕФЗНЗЈОЭЪЧЮЂЗж(ЖдгкЪ§зжЭМЯёРДЫЕОЭЪЧВюЗж),дкаХКХДІРэЕФНЧЖШРДПД,
вВПЩвдЫЕЪЧгУИпЭЈТЫВЈЦї,МДБЃСєИпЦЕаХКХЁЃ
БпдЕаХЯЂАќКЌСНИіЗНУц:1.ЯёЫиЕФзјБъ2.БпдЕЕФЗНЯђ
(1)БпдЕМьВт
??БпдЕМьВт жївЊ ЪЧЭМЯѓЕФЛвЖШБфЛЏЕФЖШСПЁЂМьВтКЭЖЈЮЛЁЃЯТБпСНЗљЭМеЙЯжГіСЫБпдЕМьВтЕФаЇЙћЁЃ

??БпдЕМьВтЕФгІгУ:гявхЗжИюКЭЪЕР§ЗжИю
гявхЗжИю:

ЪЕР§ЗжИю:

(2)ИпЦЕаХКХ&ЕЭЦЕаХКХ
??ЭМЯёжаЕФЕЭЦЕаХКХКЭИпЦЕаХКХвВНазіЕЭЦЕЗжСПКЭИпЦЕЗжСПЁЃ
??МђЕЅвЛЕуЫЕ,ЭМЯёжаЕФИпЦЕЗжСП,жИЕФЪЧЭМЯёЧПЖШ(ССЖШ/ЛвЖШ)БфЛЏОчСвЕФЕиЗН,вВОЭЪЧБпдЕ(ТжРЊ);
??ЭМЯёжаЕФЕЭЦЕЗжСП,жИЕФЪЧЭМЯёЧПЖШ(ССЖШ/ЛвЖШ)БфЛЛЦНЛКЕФЕиЗН,вВОЭЪЧДѓЦЌЩЋПщЕФЕиЗНЁЃ
??ШЫблЖдЭМЯёжаЕФИпЦЕаХКХИќЮЊУєИаЁЃ
(3)БпдЕМьВтЕФдРэКЭВНжш
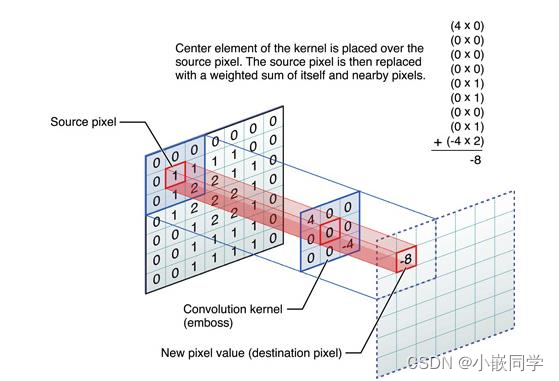
??1)ТЫВЈ:БпдЕМьВтЕФЫуЗЈжївЊЪЧЛљгкЭМЯёЧПЖШЕФвЛНзКЭЖўНзЕМЪ§,ЕЋЕМЪ§ЭЈГЃЖддыЩљКмУєИа,вђДЫБиаыВЩгУТЫВЈЦїРДИФЩЦгыдыЩљгаЙиЕФБпдЕМьВтЦїЕФадФмЁЃГЃМћЕФТЫВЈЗНЗЈжївЊгаИпЫЙТЫВЈЁЃ
??2)діЧП:діЧПБпдЕЕФЛљДЁЪЧШЗЖЈЭМЯёИїЕуСкгђЧПЖШЕФБфЛЏжЕЁЃдіЧПЫуЗЈПЩвдНЋЭМЯёЛвЖШЕуСкгђЧПЖШжЕгаЯджјБфЛЏЕФЕуЭЙЯдГіРДЁЃдкОпЬхБрГЬЪЕЯжЪБ,ПЩЭЈЙ§МЦЫуЬнЖШЗљжЕРДШЗЖЈЁЃ
??3)МьВт:ОЙ§діЧПЕФЭМЯё,ЭљЭљСкгђжагаКмЖрЕуЕФЬнЖШжЕБШНЯДѓ,ЖјдкЬиЖЈЕФгІгУжа,етаЉЕуВЂВЛЪЧЮвУЧвЊевЕФБпдЕЕу,ЫљвдгІИУВЩгУФГжжЗНЗЈРДЖдетаЉЕуНјааШЁЩсЁЃЪЕМЪЙЄГЬжа,ГЃгУЕФЗНЗЈЪЧЭЈЙ§уажЕЛЏЗНЗЈРДМьВтЁЃ
??МьВтдРэ:ЙигкБпдЕМьВтЕФЛљДЁРДздгквЛИіЪТЪЕ, МДдкБпдЕВПЗж,ЯёЫижЕГіЯжЁБЬјдОЁАЛђепНЯДѓЕФБфЛЏЁЃ ШчЙћдкДЫБпдЕВПЗжЧѓШЁвЛНзЕМЪ§,ОЭЛсПДЕНМЋжЕЕФГіЯжЁЃЖјдквЛНзЕМЪ§ЮЊМЋжЕЕФЕиЗН,ЖўНзЕМЪ§ЮЊ0,ЛљгкетИідРэ,ОЭПЩвдНјааБпдЕМьВтЁЃ
??дкБпдЕВПЗжЧѓШЁвЛНзЕМЪ§,ФуЛсПДЕНМЋжЕЕФГіЯж:
??ШчЙћдкБпдЕВПЗжЧѓЖўНзЕМЪ§ЛсГіЯжЪВУДЧщПі?
??ДгЩЯР§жаЮвУЧПЩвдЭЦТлМьВтБпдЕПЩвдЭЈЙ§ЖЈЮЛЬнЖШжЕДѓгкСкгђЕФЯрЫиЕФЗНЗЈевЕН(ЛђепЭЦЙуЕНДѓгквЛИіЗЇжЕ).ДгвдЩЯЗжЮіжа,ЮвУЧЭЦТлЖўНзЕМЪ§ПЩвдгУРДМьВтБпдЕ ЁЃвђЮЊЭМЯёЪЧ ЁА2ЮЌЁБ, ЮвУЧашвЊдкСНИіЗНЯђЧѓЕМЁЃ
(4)ЭМЯёШёЛЏ
??ЭМЯёШёЛЏ(image sharpening)ЪЧВЙГЅЭМЯёЕФТжРЊ,діЧПЭМЯёЕФБпдЕМАЛвЖШЬјБфЕФВПЗж,ЪЙЭМЯёБфЕУЧхЮњЁЃ
??ЭМЯёШёЛЏЪЧЮЊСЫЭЛГіЭМЯёЩЯЕФЮяЕФБпдЕЁЂТжРЊ,ЛђФГаЉЯпадФПБъвЊЫиЕФЬиеїЁЃетжжТЫВЈЗНЗЈЬсИпСЫЕиЮяБпдЕгыжмЮЇЯёдЊжЎМфЕФЗДВю,вђДЫвВБЛГЦЮЊБпдЕдіЧПЁЃ
??ЭМЯёШёЛЏГЃЪЙгУЕФЪЧРЦеРЫЙБфЛЛКЫКЏЪ§:
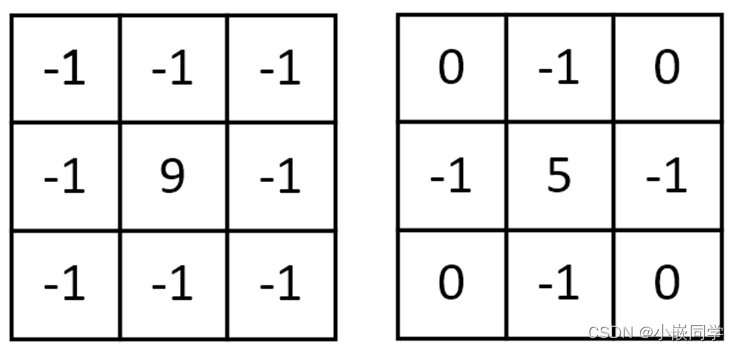
??ЭМжагвБпЕФФЃАхЫќЪЧИљОнЩЯЯТзѓгвЫФИі90ЖШЗНЯђЕФЯёЫижЕРДМЦЫуЖўНзЕМЕФЁЃШчЙћЯывЊМгШыаБЖдНЧЩЯЕФЯёЫиРДМЦЫу,ПЩЪЙгУзѓБпЕФФЃАхЁЃ
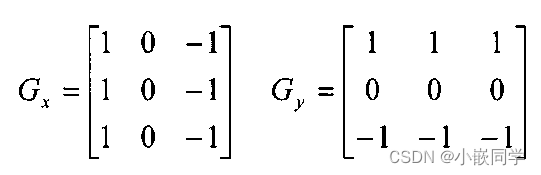
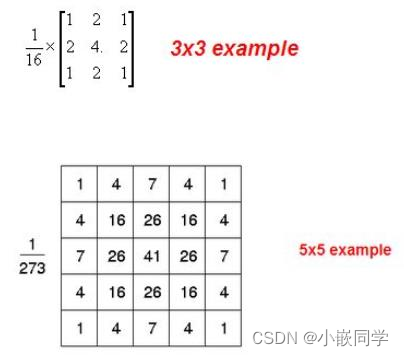
(5)ЭМЯёЦНЛЌ
??ЭМЯёЦНЛЌЪЧжИгУгкЭЛГіЭМЯёЕФПэДѓЧјгђЁЂЕЭЦЕГЩЗжЁЂжїИЩВПЗжЛђвжжЦЭМЯёдыЩљКЭИЩШХИпЦЕГЩЗжЕФЭМЯёДІРэЗНЗЈ,ФПЕФЪЧЪЙЭМЯёССЖШЦНЛКНЅБф,МѕаЁЭЛБфЬнЖШ,ИФЩЦЭМЯёжЪСПЁЃ
??гУGxРДОэЛ§ЯТУцетеХЭМЕФЛА,ОЭЛсдкжаМфКкАзБпНчЛёЕУБШНЯДѓЕФжЕЁЃ
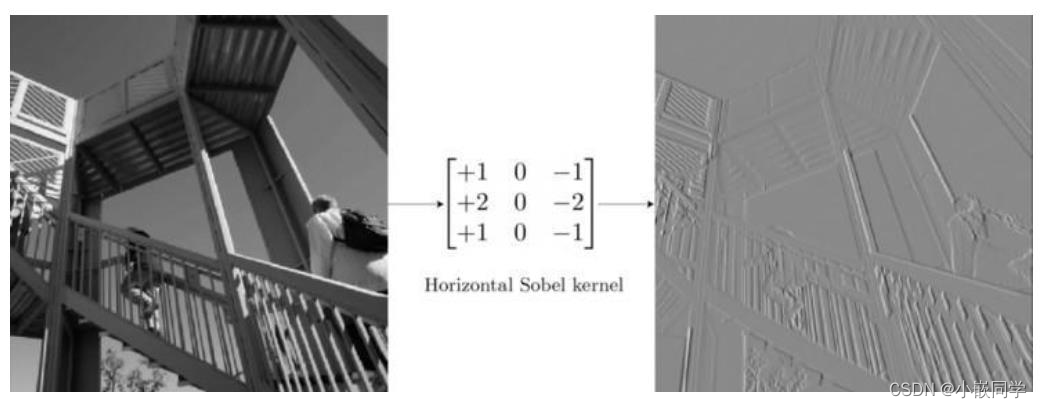
ЖўЁЂSobelЫузг
??SobelЫузгЪЧЕфаЭЕФЛљгквЛНзЕМЪ§ЕФБпдЕМьВтЫузг,гЩгкИУЫузгжав§ШыСЫРрЫЦОжВПЦНОљЕФдЫЫу,вђДЫЖддыЩљОпгаЦНЛЌзїгУ,ФмКмКУЕФЯћГ§дыЩљЕФгАЯьЁЃSobelЫузгЖдгкЯёЫиЕФЮЛжУЕФгАЯьзіСЫМгШЈ,вђДЫгыPrewittЫузгЯрБШаЇЙћИќКУЁЃ
??SobelЫузгАќКЌСНзщ3x3ЕФОиеѓ,ЗжБ№ЮЊКсЯђМАзнЯђФЃАх,НЋжЎгыЭМЯёзїЦНУцОэЛ§,МДПЩЗжБ№ЕУГіКсЯђМАзнЯђЕФССЖШВюЗжНќЫЦжЕЁЃЪЕМЪЪЙгУжа,ГЃгУШчЯТСНИіФЃАхРДМьВтЭМЯёБпдЕ
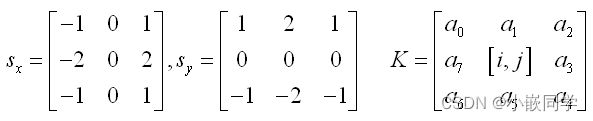
??ШБЕуЪЧSobelЫузгВЂУЛгаНЋЭМЯёЕФжїЬтгыБГОАбЯИёЕиЧјЗжПЊРД,ЛЛбджЎОЭЪЧSobelЫузгВЂУЛгаЛљгкЭМЯёЛвЖШНјааДІРэ,гЩгкSobelЫузгВЂУЛгабЯИёЕиФЃФтШЫЕФЪгОѕЩњРэЬиеї,ЫљвдЬсШЁЕФЭМЯёТжРЊгаЪБВЂВЛФмСюШЫТњвтЁЃ
??дыЩљКЭБпдЕЖМЪЧЛвЖШБфЛЏОчСвЕФЕиЗН,ЫљвдБОжЪЯрЭЌ,ТЫВЈВЛФмЙ§ЖШ,ЗёдђБпдЕОЭМѕЫ№СЫ
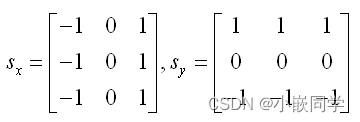
??PrewittЫузгЪЧвЛжжвЛНзЮЂЗжЫузгЕФБпдЕМьВт,РћгУЯёЫиЕуЩЯЯТЁЂзѓгвСкЕуЕФЛвЖШВю,дкБпдЕДІДяЕНМЋжЕМьВтБпдЕ,ШЅЕєВПЗжЮББпдЕ,ЖддыЩљОпгаЦНЛЌзїгУ ЁЃЦфдРэЪЧдкЭМЯёПеМфРћгУСНИіЗНЯђФЃАхгыЭМЯёНјааСкгђОэЛ§РДЭъГЩЕФ,етСНИіЗНЯђФЃАхвЛИіМьВтЫЎЦНБпдЕ,вЛИіМьВтДЙжББпдЕЁЃЦфдРэгыsobelЫузгвЛбљЁЃ
Ш§ЁЂCannyБпдЕМьВтЫуЗЈ
??CannyЪЧФПЧАзюгХауЕФБпдЕМьВтЫуЗЈ( дкДЋЭГЕФШЫЙЄжЧФмжаВЛАќРЈЩюЖШбЇЯА ),ЦфФПБъЮЊевЕНвЛИізюгХЕФБпдЕ,ЦфзюгХБпдЕЕФЖЈвхЮЊ:
1ЁЂКУЕФМьВт:ЫуЗЈФмЙЛОЁПЩФмЕФБъГіЭМЯёжаЕФЪЕМЪБпдЕ
2ЁЂКУЕФЖЈЮЛ:БъЪЖГіЕФБпдЕвЊгыЪЕМЪЭМЯёжаЕФБпдЕОЁПЩФмНгНќ
3ЁЂзюаЁЯьгІ:ЭМЯёжаЕФБпдЕжЛФмБъМЧвЛДЮ
1ЁЂЫуЗЈВНжш
1. ЖдЭМЯёНјааЛвЖШЛЏ
2. ЖдЭМЯёНјааИпЫЙТЫВЈ:
ИљОнД§ТЫВЈЕФЯёЫиЕуМАЦфСкгђЕуЕФЛвЖШжЕАДеевЛЖЈЕФВЮЪ§ЙцдђНјааМгШЈЦНОљЁЃетбљ
ПЩвдгааЇТЫШЅРэЯыЭМЯёжаЕўМгЕФИпЦЕдыЩљЁЃ
3. МьВтЭМЯёжаЕФЫЎЦНЁЂДЙжБКЭЖдНЧБпдЕ(ШчPrewitt, SobelЫузгЕШ)ЁЃ
4. ЖдЬнЖШЗљжЕНјааЗЧМЋДѓжЕвжжЦ
5. гУЫЋуажЕЫуЗЈМьВтКЭСЌНгБпдЕ
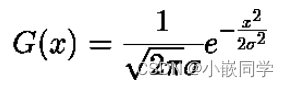
2ЁЂИпЫЙЦНЛЌ
??ИпЫЙЦНЛЌЫЎЦНКЭДЙжБЗНЯђГЪЯжИпЫЙЗжВМ,ИќЭЛГіСЫжааФЕудкЯёЫиЦНЛЌКѓЕФШЈжи,ЯрБШгкОљжЕТЫВЈЖјбд,газХИќКУЕФЦНЛЌаЇЙћЁЃ
??живЊЕФЪЧашвЊРэНт, ИпЫЙОэЛ§КЫДѓаЁЕФбЁдёНЋгАЯьCannyМьВтЦїЕФадФм:ГпДчдНДѓ,МьВтЦїЖддыЩљЕФУєИаЖШдНЕЭ,ЕЋЪЧБпдЕМьВтЕФЖЈЮЛЮѓВювВНЋТдгадіМгЁЃ вЛАу5x5ЪЧвЛИіБШНЯВЛДэЕФtrade offЁЃ
3ЁЂЗЧМЋДѓжЕвжжЦ
??ЗЧМЋДѓжЕвжжЦ,МђГЦЮЊNMSЫуЗЈ,гЂЮФЮЊNon-Maximum SuppressionЁЃЦфЫМЯыЪЧЫбЫиОжВПзюДѓжЕ,вжжЦЗЧМЋДѓжЕЁЃNMSЫуЗЈдкВЛЭЌгІгУжаЕФОпЬхЪЕЯжВЛЬЋвЛбљ,ЕЋЫМЯыЪЧвЛбљЕФЁЃ
??ЮЊЪВУДвЊВЩгУЗЧМЋДѓжЕвжжЦ?вдФПБъМьВтЮЊР§:ФПБъМьВтЕФЙ§ГЬжадкЭЌвЛФПБъЕФЮЛжУЩЯЛсВњЩњДѓСПЕФКђбЁПђ,етаЉКђбЁПђЯрЛЅжЎМфПЩФмЛсгажиЕў,ДЫЪБЮвУЧашвЊРћгУЗЧМЋДѓжЕвжжЦевЕНзюМбЕФФПБъБпНчПђ,ЯћГ§ШпгрЕФБпНчПђЁЃ
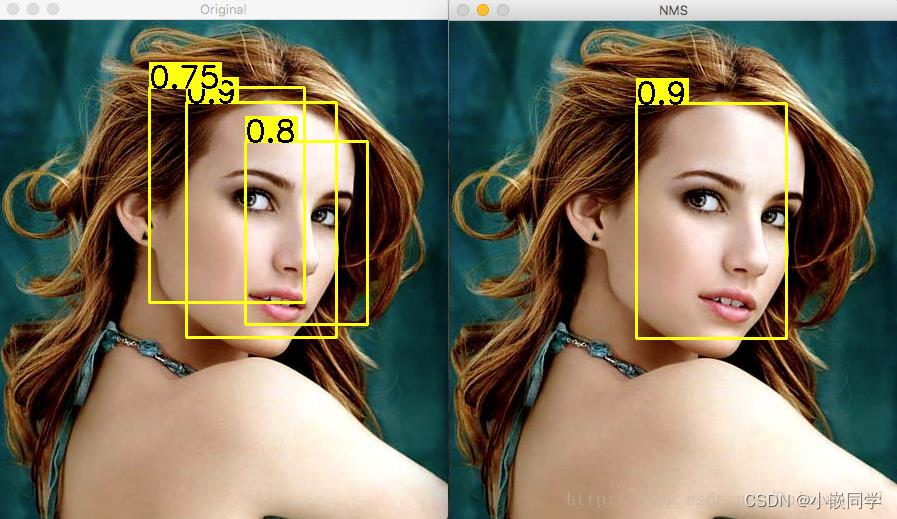
??ЖдгкжиЕўЕФКђбЁПђ,МЦЫуЫћУЧЕФжиЕўВПЗж,ШєДѓгкЙцЖЈуажЕ,дђЩОГ§;ЕЭгкуажЕдђБЃСєЁЃЖдгкЮожиЕўЕФКђбЁПђ,ЖМБЃСєЁЃ
??ЗЧМЋДѓжЕвжжЦ:ЭЈЫзвтвхЩЯЪЧжИбАевЯёЫиЕуОжВПзюДѓжЕ,НЋЗЧМЋДѓжЕЕуЫљЖдгІЕФЛвЖШжЕжУЮЊ0,етбљПЩвдЬоГ§ЕєвЛДѓВПЗжЗЧБпдЕЕФЕуЁЃ
1) НЋЕБЧАЯёЫиЕФЬнЖШЧПЖШгыбие§ИКЬнЖШЗНЯђЩЯЕФСНИіЯёЫиНјааБШНЯЁЃ
2) ШчЙћЕБЧАЯёЫиЕФЬнЖШЧПЖШгыСэЭтСНИіЯёЫиЯрБШзюДѓ,дђИУЯёЫиЕуБЃСєЮЊБпдЕЕу,Зёдђ
ИУЯёЫиЕуНЋБЛвжжЦ(ЛвЖШжЕжУЮЊ0)ЁЃ
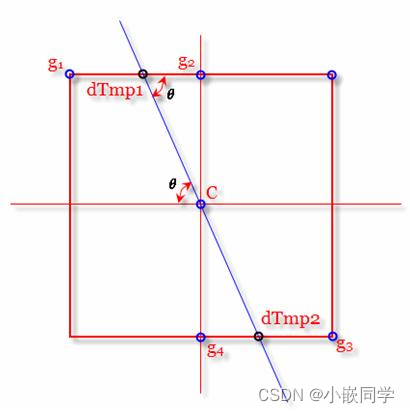
??dTmp1КЭdTmp2ЪЧСНИіащФтЯёЫи,вВгаГЦбЧЯёЫиЕу,ЦфгЩЯёЫиЕуЭЈЙ§ЫЋЯпадВхжЕЫуЗЈЧѓЕУЕФЁЃ
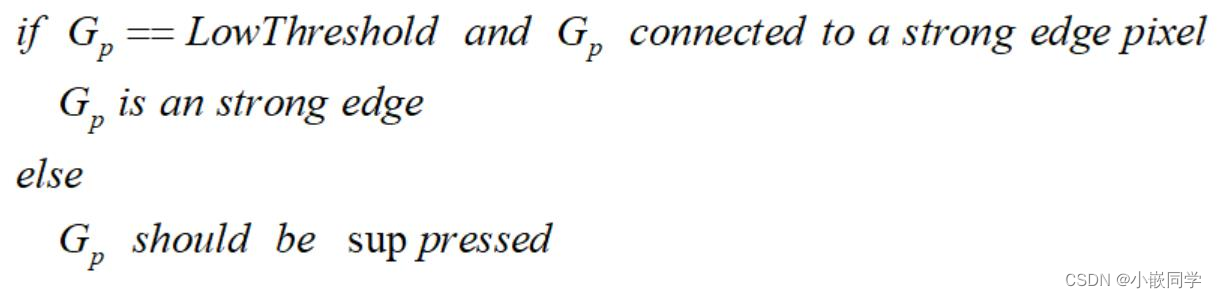
4ЁЂЫЋуажЕМьВт
??гУЫЋуажЕЫуЗЈМьВт(жЭКѓуажЕ):ЭъГЩЗЧМЋДѓжЕвжжЦКѓ,ЛсЕУЕНвЛИіЖўжЕЭМЯё,ЗЧБпдЕЕФЕуЛвЖШжЕОљЮЊ0,ПЩФмЮЊБпдЕЕФОжВПЛвЖШМЋДѓжЕЕуПЩЩшжУЦфЛвЖШЮЊ128(ЛђЦфЫћ)ЁЃетбљвЛИіМьВтНсЙћЛЙЪЧАќКЌСЫКмЖргЩдыЩљМАЦфЫћдвђдьГЩЕФМйБпдЕЁЃвђДЫЛЙашвЊНјвЛВНЕФДІРэЁЃ
??? ШчЙћБпдЕЯёЫиЕФЬнЖШжЕИпгкИпуажЕ,дђНЋЦфБъМЧЮЊЧПБпдЕЯёЫи;
??? ШчЙћБпдЕЯёЫиЕФЬнЖШжЕаЁгкИпуажЕВЂЧвДѓгкЕЭуажЕ,дђНЋЦфБъМЧЮЊШѕБпдЕЯёЫи;
??? ШчЙћБпдЕЯёЫиЕФЬнЖШжЕаЁгкЕЭуажЕ,дђЛсБЛвжжЦЁЃ
??ДѓгкИпуажЕЮЊЧПБпдЕ,аЁгкЕЭуажЕВЛЪЧБпдЕЁЃНщгкжаМфЪЧШѕБпдЕЁЃуажЕЕФбЁдёШЁОігкИјЖЈЪфШыЭМЯёЕФФкШн,вВЮоЗЈжИЖЈШЗЖЈЕФжЕ,жЛФмШЅЕїЪдЕУЕНаЇЙћБШНЯКУЕФуажЕЁЃ
??вжжЦЙТСЂЕЭуажЕЕу:ЕНФПЧАЮЊжЙ,БЛЛЎЗжЮЊЧПБпдЕЕФЯёЫиЕувбОБЛШЗЖЈЮЊБпдЕ,вђЮЊЫќУЧЪЧДгЭМЯёжаЕФецЪЕБпдЕжаЬсШЁГіРДЕФЁЃШЛЖј,ЖдгкШѕБпдЕЯёЫи,НЋЛсгавЛаЉељТл,вђЮЊетаЉЯёЫиПЩвдДгецЪЕБпдЕЬсШЁвВПЩвдЪЧвђдыЩљЛђбеЩЋБфЛЏв§Ц№ЕФЁЃ
??ЮЊСЫЛёЕУзМШЗЕФНсЙћ,гІИУвжжЦгЩКѓепв§Ц№ЕФШѕБпдЕ:
? ЭЈГЃ,гЩецЪЕБпдЕв§Ц№ЕФШѕБпдЕЯёЫиНЋСЌНгЕНЧПБпдЕЯёЫи,ЖјдыЩљЯьгІЮДСЌНгЁЃ
? ЮЊСЫИњзйБпдЕСЌНг,ЭЈЙ§ВщПДШѕБпдЕЯёЫиМАЦф8ИіСкгђЯёЫи,жЛвЊЦфжавЛИіЮЊЧПБпдЕЯёЫи,
дђИУШѕБпдЕЕуОЭПЩвдБЃСєЮЊецЪЕЕФБпдЕЁЃ
ЫФЁЂЯрЙиДњТы
1ЁЂcanny_detail.py
import numpy as np
import matplotlib.pyplot as plt
import math
if __name__ == '__main__':
pic_path = 'lenna.png'
img = plt.imread(pic_path)
if pic_path[-4:] == '.png': # .pngЭМЦЌдкетРяЕФДцДЂИёЪНЪЧ0ЕН1ЕФИЁЕуЪ§,ЫљвдвЊРЉеЙЕН255дйМЦЫу
img = img * 255 # ЛЙЪЧИЁЕуЪ§РраЭ
img = img.mean(axis=-1) # ШЁОљжЕОЭЪЧЛвЖШЛЏСЫ
# 1ЁЂИпЫЙЦНЛЌ
#sigma = 1.52 # ИпЫЙЦНЛЌЪБЕФИпЫЙКЫВЮЪ§,БъзМВю,ПЩЕї
sigma = 0.5 # ИпЫЙЦНЛЌЪБЕФИпЫЙКЫВЮЪ§,БъзМВю,ПЩЕї
dim = int(np.round(6 * sigma + 1)) # roundЪЧЫФЩсЮхШыКЏЪ§,ИљОнБъзМВюЧѓИпЫЙКЫЪЧМИГЫМИЕФ,вВОЭЪЧЮЌЖШ
if dim % 2 == 0: # зюКУЪЧЦцЪ§,ВЛЪЧЕФЛАМгвЛ
dim += 1
Gaussian_filter = np.zeros([dim, dim]) # ДцДЂИпЫЙКЫ,етЪЧЪ§зщВЛЪЧСаБэСЫ
tmp = [i-dim//2 for i in range(dim)] # ЩњГЩвЛИіађСа
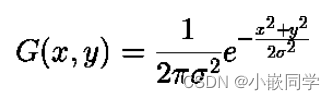
n1 = 1/(2*math.pi*sigma**2) # МЦЫуИпЫЙКЫ
n2 = -1/(2*sigma**2)
for i in range(dim):
for j in range(dim):
Gaussian_filter[i, j] = n1*math.exp(n2*(tmp[i]**2+tmp[j]**2))
Gaussian_filter = Gaussian_filter / Gaussian_filter.sum()
dx, dy = img.shape
img_new = np.zeros(img.shape) # ДцДЂЦНЛЌжЎКѓЕФЭМЯё,zerosКЏЪ§ЕУЕНЕФЪЧИЁЕуаЭЪ§Он
tmp = dim//2
img_pad = np.pad(img, ((tmp, tmp), (tmp, tmp)), 'constant') # БпдЕЬюВЙ
for i in range(dx):
for j in range(dy):
img_new[i, j] = np.sum(img_pad[i:i+dim, j:j+dim]*Gaussian_filter)
plt.figure(1)
plt.imshow(img_new.astype(np.uint8), cmap='gray') # ДЫЪБЕФimg_newЪЧ255ЕФИЁЕуаЭЪ§Он,ЧПжЦРраЭзЊЛЛВХПЩвд,grayЛвНз
plt.axis('off')
# 2ЁЂЧѓЬнЖШЁЃвдЯТСНИіЪЧТЫВЈЧѓЬнЖШгУЕФsobelОиеѓ(МьВтЭМЯёжаЕФЫЎЦНЁЂДЙжБКЭЖдНЧБпдЕ)
sobel_kernel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
sobel_kernel_y = np.array([[1, 2, 1], [0, 0, 0], [-1, -2, -1]])
img_tidu_x = np.zeros(img_new.shape) # ДцДЂЬнЖШЭМЯё
img_tidu_y = np.zeros([dx, dy])
img_tidu = np.zeros(img_new.shape)
img_pad = np.pad(img_new, ((1, 1), (1, 1)), 'constant') # БпдЕЬюВЙ,ИљОнЩЯУцОиеѓНсЙЙЫљвдаД1
for i in range(dx):
for j in range(dy):
img_tidu_x[i, j] = np.sum(img_pad[i:i+3, j:j+3]*sobel_kernel_x) # xЗНЯђ
img_tidu_y[i, j] = np.sum(img_pad[i:i+3, j:j+3]*sobel_kernel_y) # yЗНЯђ
img_tidu[i, j] = np.sqrt(img_tidu_x[i, j]**2 + img_tidu_y[i, j]**2)
img_tidu_x[img_tidu_x == 0] = 0.00000001
angle = img_tidu_y/img_tidu_x
plt.figure(2)
plt.imshow(img_tidu.astype(np.uint8), cmap='gray')
plt.axis('off')
# 3ЁЂЗЧМЋДѓжЕвжжЦ
img_yizhi = np.zeros(img_tidu.shape)
for i in range(1, dx-1):
for j in range(1, dy-1):
flag = True # дк8СкгђФкЪЧЗёвЊФЈШЅзіИіБъМЧ
temp = img_tidu[i-1:i+2, j-1:j+2] # ЬнЖШЗљжЕЕФ8СкгђОиеѓ
if angle[i, j] <= -1: # ЪЙгУЯпадВхжЕЗЈХаЖЯвжжЦгыЗё
num_1 = (temp[0, 1] - temp[0, 0]) / angle[i, j] + temp[0, 1]
num_2 = (temp[2, 1] - temp[2, 2]) / angle[i, j] + temp[2, 1]
if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):
flag = False
elif angle[i, j] >= 1:
num_1 = (temp[0, 2] - temp[0, 1]) / angle[i, j] + temp[0, 1]
num_2 = (temp[2, 0] - temp[2, 1]) / angle[i, j] + temp[2, 1]
if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):
flag = False
elif angle[i, j] > 0:
num_1 = (temp[0, 2] - temp[1, 2]) * angle[i, j] + temp[1, 2]
num_2 = (temp[2, 0] - temp[1, 0]) * angle[i, j] + temp[1, 0]
if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):
flag = False
elif angle[i, j] < 0:
num_1 = (temp[1, 0] - temp[0, 0]) * angle[i, j] + temp[1, 0]
num_2 = (temp[1, 2] - temp[2, 2]) * angle[i, j] + temp[1, 2]
if not (img_tidu[i, j] > num_1 and img_tidu[i, j] > num_2):
flag = False
if flag:
img_yizhi[i, j] = img_tidu[i, j]
plt.figure(3)
plt.imshow(img_yizhi.astype(np.uint8), cmap='gray')
plt.axis('off')
# 4ЁЂЫЋуажЕМьВт,СЌНгБпдЕЁЃБщРњЫљгавЛЖЈЪЧБпЕФЕу,ВщПД8СкгђЪЧЗёДцдкгаПЩФмЪЧБпЕФЕу,НјеЛ
lower_boundary = img_tidu.mean() * 0.5
high_boundary = lower_boundary * 3 # етРяЮвЩшжУИпуажЕЪЧЕЭуажЕЕФШ§БЖ
zhan = []
for i in range(1, img_yizhi.shape[0]-1): # ЭтШІВЛПМТЧСЫ
for j in range(1, img_yizhi.shape[1]-1):
if img_yizhi[i, j] >= high_boundary: # ШЁ,вЛЖЈЪЧБпЕФЕу
img_yizhi[i, j] = 255
zhan.append([i, j])
elif img_yizhi[i, j] <= lower_boundary: # Щс
img_yizhi[i, j] = 0
while not len(zhan) == 0:
temp_1, temp_2 = zhan.pop() # ГіеЛ
a = img_yizhi[temp_1-1:temp_1+2, temp_2-1:temp_2+2]
if (a[0, 0] < high_boundary) and (a[0, 0] > lower_boundary):
img_yizhi[temp_1-1, temp_2-1] = 255 # етИіЯёЫиЕуБъМЧЮЊБпдЕ
zhan.append([temp_1-1, temp_2-1]) # НјеЛ
if (a[0, 1] < high_boundary) and (a[0, 1] > lower_boundary):
img_yizhi[temp_1 - 1, temp_2] = 255
zhan.append([temp_1 - 1, temp_2])
if (a[0, 2] < high_boundary) and (a[0, 2] > lower_boundary):
img_yizhi[temp_1 - 1, temp_2 + 1] = 255
zhan.append([temp_1 - 1, temp_2 + 1])
if (a[1, 0] < high_boundary) and (a[1, 0] > lower_boundary):
img_yizhi[temp_1, temp_2 - 1] = 255
zhan.append([temp_1, temp_2 - 1])
if (a[1, 2] < high_boundary) and (a[1, 2] > lower_boundary):
img_yizhi[temp_1, temp_2 + 1] = 255
zhan.append([temp_1, temp_2 + 1])
if (a[2, 0] < high_boundary) and (a[2, 0] > lower_boundary):
img_yizhi[temp_1 + 1, temp_2 - 1] = 255
zhan.append([temp_1 + 1, temp_2 - 1])
if (a[2, 1] < high_boundary) and (a[2, 1] > lower_boundary):
img_yizhi[temp_1 + 1, temp_2] = 255
zhan.append([temp_1 + 1, temp_2])
if (a[2, 2] < high_boundary) and (a[2, 2] > lower_boundary):
img_yizhi[temp_1 + 1, temp_2 + 1] = 255
zhan.append([temp_1 + 1, temp_2 + 1])
for i in range(img_yizhi.shape[0]):
for j in range(img_yizhi.shape[1]):
if img_yizhi[i, j] != 0 and img_yizhi[i, j] != 255:
img_yizhi[i, j] = 0
# ЛцЭМ
plt.figure(4)
plt.imshow(img_yizhi.astype(np.uint8), cmap='gray')
plt.axis('off') # ЙиБезјБъПЬЖШжЕ
plt.show()
2ЁЂНшжњopencvПтЪЕЯжЕФ:canny.py
#!/usr/bin/env python
# encoding=gbk
import cv2
import numpy as np
'''
cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
БивЊВЮЪ§:
ЕквЛИіВЮЪ§ЪЧашвЊДІРэЕФдЭМЯё,ИУЭМЯёБиаыЮЊЕЅЭЈЕРЕФЛвЖШЭМ;
ЕкЖўИіВЮЪ§ЪЧжЭКѓуажЕ1;
ЕкШ§ИіВЮЪ§ЪЧжЭКѓуажЕ2ЁЃ
'''
img = cv2.imread("lenna.png", 1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("canny", cv2.Canny(gray, 200, 300))
cv2.waitKey()
cv2.destroyAllWindows()
3ЁЂгХЛЏКѓЕФГЬађ:canny_track.py
#!/usr/bin/env python
# encoding=gbk
'''
CannyБпдЕМьВт:гХЛЏЕФГЬађ
'''
import cv2
import numpy as np
def CannyThreshold(lowThreshold):
detected_edges = cv2.GaussianBlur(gray,(3,3),0) #ИпЫЙТЫВЈ
detected_edges = cv2.Canny(detected_edges,
lowThreshold,
lowThreshold*ratio,
apertureSize = kernel_size) #БпдЕМьВт
# just add some colours to edges from original image.
dst = cv2.bitwise_and(img,img,mask = detected_edges) #гУдЪМбеЩЋЬэМгЕНМьВтЕФБпдЕЩЯ
cv2.imshow('canny demo',dst)
lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3
img = cv2.imread('lenna.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #зЊЛЛВЪЩЋЭМЯёЮЊЛвЖШЭМ
cv2.namedWindow('canny demo')
#ЩшжУЕїНкИм,
'''
ЯТУцЪЧЕкЖўИіКЏЪ§,cv2.createTrackbar()
ЙВга5ИіВЮЪ§,ЦфЪЕетЮхИіВЮЪ§ПДБфСПУћОЭДѓИХФмжЊЕРЪЧЪВУДвтЫМСЫ
ЕквЛИіВЮЪ§,ЪЧетИіtrackbarЖдЯѓЕФУћзж
ЕкЖўИіВЮЪ§,ЪЧетИіtrackbarЖдЯѓЫљдкУцАхЕФУћзж
ЕкШ§ИіВЮЪ§,ЪЧетИіtrackbarЕФФЌШЯжЕ,вВЪЧЕїНкЕФЖдЯѓ
ЕкЫФИіВЮЪ§,ЪЧетИіtrackbarЩЯЕїНкЕФЗЖЮЇ(0~count)
ЕкЮхИіВЮЪ§,ЪЧЕїНкtrackbarЪБЕїгУЕФЛиЕїКЏЪ§Ућ
'''
cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold)
CannyThreshold(0) # initialization
if cv2.waitKey(0) == 27: #wait for ESC key to exit cv2
cv2.destroyAllWindows()
зЂ:БОЮФеТВЮПМСЫАйЖШАйПЦЁЂЫћШЫММЪѕВЉПЭЁЂАЫЖЗбЇдКНЬГЬзЪСЯЁЂМЦЫуЛњЪгОѕЪщМЎЕШзлКЯећРэЖјРД,ШчгаЧжШЈ,СЊЯЕЩОГ§!ЫЎЦНгаЯо,ЛЖгИїЮЛжИЕМНЛСї!

