0.�����
Kalibr����IMU+����ı궨 : �������д�ķdz���,Ӧ����Ŀǰ����������ϵIJ����ˡ�
1.����
-
�궨����ڲ�
������ֿ���ʹ�õĹ��ߺܶ�,kalibr���ܺ�ȫ,���Ե����궨����ڲΡ�IMU��ƫ�Լ������IMU���,���Կ���ʹ��kalibr���궨����ڲΡ�
Ҳ����ʹ�������������궨����ڲ�,����ROS�Դ�������궨���߰�,�����Լ��ɼ�ͼ��ʹ��MATLAB���б궨�� -
�궨IMU��ƫ���������
ͬ���궨IMUҲ����ʹ��kalibr���б궨,������������,�Ƚ�����ʹ�õľ��Ǹۿƴ��imu_utils�� -
ʹ��1��2�Ľ��,���ϱ궨�����IMU���
�����ֻ��ʹ��kalibr��,Ҳ���Ǻ�����Ҫ�IJ���
2.��װ
������װ�̳�:https://github.com/ethz-asl/kalibr/wiki/installation
ע������İ�װ�̳̲�����catkin_make,����ʹ��catkin build(ע���м�û��_),catkin buildӦ����catkin_make��һ���Ľ��汾,�����Ƕ����ж��ROS���ܰ��Ĺ��̽��б��뻥��Ӱ��,��catkin_make����һ�����,����Ⱦ�����ռ䡣(��һ����,��������ٲ�һ��)
��������İ�װ������ϸ��չ�����װ����������,�ҳ��Թ�ʹ��catkin_make����ֱ�ӱ���,Ҳ���Ա���ɹ�,���������б궨��ʱ�����������Ż�һֱ���ڵ�һ���Ż��ĵط�����,��֪��ʲôԭ��,������û��ǰ��չ����IJ�������װ�ɡ�
������Ubuntu 18.04��:
- ȷ���������Ѿ���װ��ROS-melodic
- �ڵ�ǰ���ڵ���ROS�汾��������,���Ұ�װ
catkin-tools,����װ�����û��catkin build�����
export ROS1_DISTRO=melodic
sudo apt-get install python-catkin-tools
- ��װ���������������(ע������
\����ɾ��,�ն˻��Զ�ʶ��)
sudo apt-get install -y \
git wget autoconf automake nano \
libeigen3-dev libboost-all-dev libsuitesparse-dev \
doxygen libopencv-dev \
libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev
���Ҫ��װ��ͬ�汾��Python����
sudo apt-get install -y python3-dev python-pip python-scipy \
python-matplotlib ipython python-wxgtk4.0 python-tk python-igraph
- ���������ռ�,ע������ط�����Ҫ,�����̳�д��,����ط�һ��Ҫ���ó�
Releaseģʽ,�����Ż�����������Կ���֮ǰ�Լ����Ե���catkin_make�����Ż���ס���ܾ���û�����ó�Releaseģʽ��
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
export ROS1_DISTRO=melodic
source /opt/ros/$ROS1_DISTRO/setup.bash
catkin init
catkin config --extend /opt/ros/$ROS1_DISTRO
catkin config --merge-devel # Necessary for catkin_tools >= 0.4.
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
- ���ع��̲�����
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/kalibr.git
cd ~/kalibr_workspace/
catkin build -DCMAKE_BUILD_TYPE=Release -j4
������ɹ���ͼ����,���Կ���catkin build����������ɫ���ḻ,��ԭ����catkin_make ���ÿ�,�Ƽ��ڽ�����!
3.����IMU��camera��α궨
3.1.�궨����
�����̳�:https://github.com/ethz-asl/kalibr/wiki/camera-imu-calibration
The tool must be provided with the following input:
- �Cbag filename.bag
ROS bag containing the image and IMU data - �Ccam camchain.yaml
intrinsic and extrinsic calibration parameters of the camera system. The output of the multiple-camera-calibration tool can be used here. (see YAML formats) - �Cimu imu.yaml
contains the IMU statistics and the IMU��s topic (see YAML formats) - �Ctarget target.yaml
the calibration target configuration (see Cailbration targets)
The calibration can be run using:
kalibr_calibrate_imu_camera --bag [filename.bag] --cam [camchain.yaml] --imu [imu.yaml] --target [target.yaml]
�ܽ�������б궨�ij���,��Ҫ�ṩ�ĸ��ļ�,�ֱ���ros bag��������ڲ��ļ���IMU��ƫ����������ļ����궨��IJ����ļ���
ע��:����������һ�����Ⲣ����ֱ������kalibr_calibrate_imu_camera�����ִ���ļ�,��������devel��Ҳû���ҵ�binĿ¼�������������rosrun��������������ڵ��,����Ҳ�Ƚ����,ˢ���˻�������֮��,���Dz�����tab�����в�ȫ,ֻ���Լ�ȫ������,��������ṩ�����IMU��camera�궨��ʵ��:
rosrun kalibr kalibr_calibrate_imu_camera --bag imu_april.bag --cam cam_april-camchain.yaml --imu imu_adis16448.yaml --target april_6x6_80x80cm.yaml
3.2.�궨�������
-
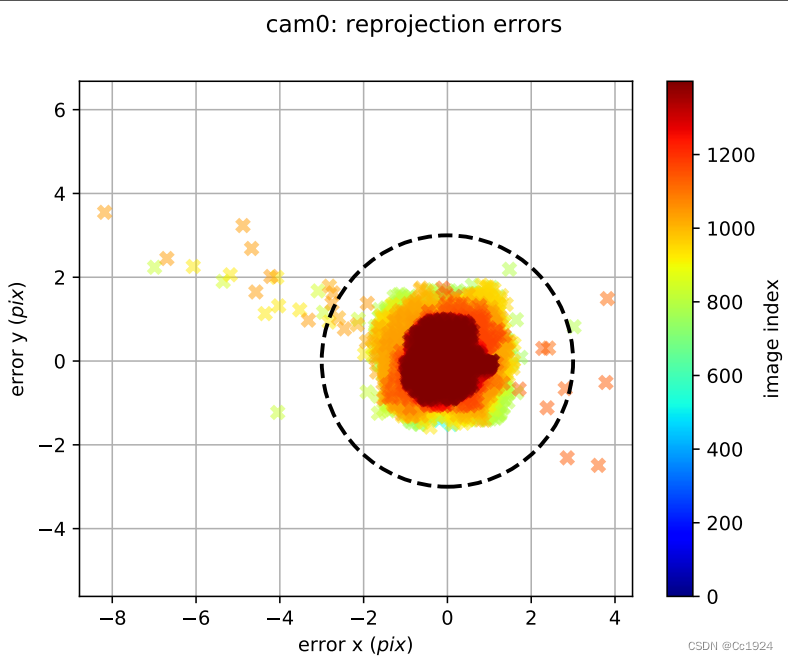
�����ͶӰ�������,���Կ���xy���������ͶӰ����1������(1 pixel)���ҡ�����:����궨����ڶ��ٷ�Χ�ڲ������ȽϺ�?
-
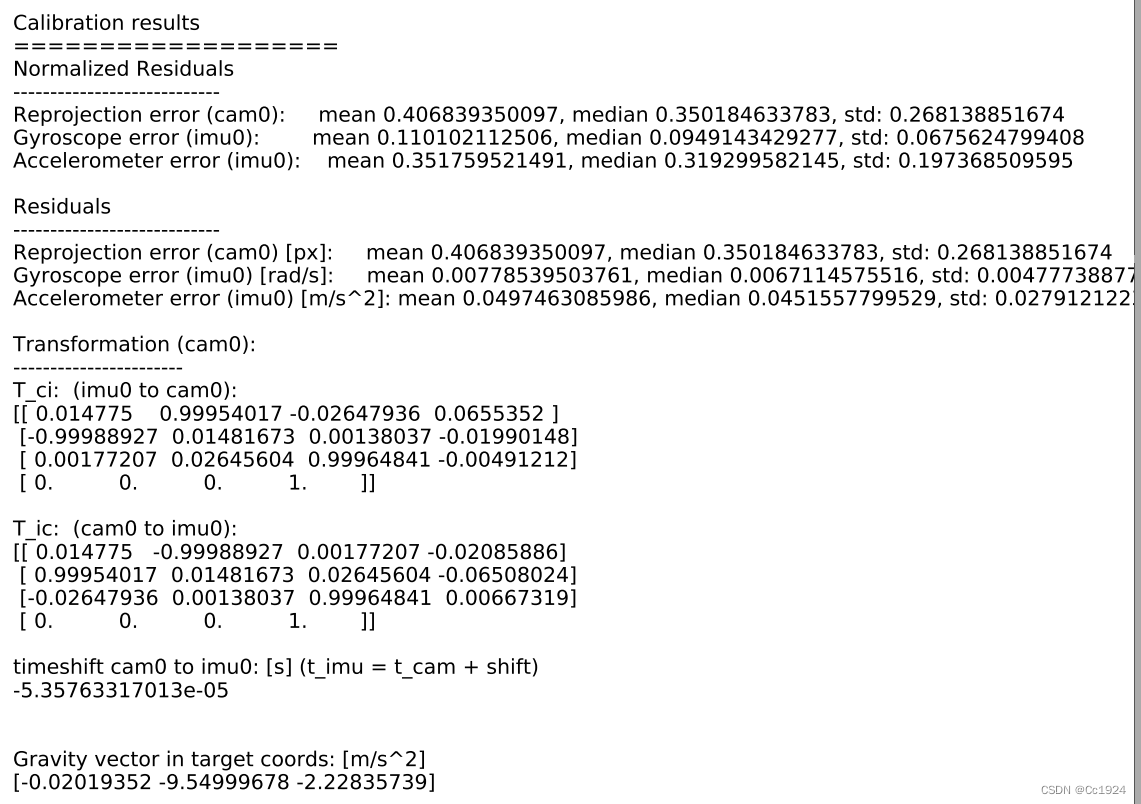
����ϸ����ֵ������Կ������pdf�����е�����,������ʾ���������ǹٷ��ı궨ʵ�����,�������Ҫ�궨�Լ����豸,�����Լ��ı궨�����������бȽ�,�궨�����̫���˵���궨�����Ϊȷ��
https://codeantenna.com/a/45xdYtWupm
https://blog.csdn.net/sinat_36502563/article/details/103053292

