���Զ���ʻ��չ��������,�Ӿ��㷨��Ӧ���Ѿ���Ϊ���ɻ�ȱ��һ���֡�����ǰ���Ӿ��㷨��Ȼ������һЩ������:һ����,��������ܵ���������ͻ�䡢����Ӱ��;��һ����,���������ʱ,�������������dz���,�����������Ҫ���ر�ߡ�
���,�г��ϳ���һ���������������,�������Ч���������Щʹ��,�Ǿ����¼�������¼�����߱��������Ӧ�ٶȡ�������Ч��Ϣ�������������ġ��߶�̬��Χ������,�������Զ���ʻ����������Ϣ�����ĸ��Ӷȡ���߳�������ʻ��ȫ,���ܹ��ڼ�������������������������
���Ľ���3�����������¼����,����ʲô���¼��������ҵģʽ�뾺����֡���ҵ��ǰ����
һ��ʲô���¼����
1.1 ����
�¼��������ļ�������������,�ֱ���Ϊ�����Ӿ�������,��һ���������������Ӿ�������,����Ӧ�������˻��������ˡ����պ���ȡ���ͬ����һ��,�¼�������˶�����ĸ�֪�dz�����,�ܹ���Ч�ش�����̬�;�̬��Ϣ��
�¼����������ڴ�ͳ��֡������Ե�:֡������Թ̶�֡�����һ֡һ֡��ͼƬ,�����������Ƶ��;���¼����ֻ��¼���ȱ仯�����ص㡣
���˻����ɻ�,�Ǻ�ν���¼���?����ġ��¼������������������ϵ��¼�,���ǰ��¼��������¼�µ�һ�������ص�Ĺ�ǿ�仯��֮Ϊ���¼�����
1.2 ����
�¼��������ڴ�ͳ֡�������,��Ҫ������Ӧ�ٶȿ졢������Ч��Ϣ�������������ġ��߶�̬��Χ�����ơ�
(1)��Ӧ�ٶȽϿ�
֡���ʼ���������һ���ŵ�֡ͼ��,���ͻȻ�ᴩ������ʱ,����Ӧ�ٶȲ�һ���ἰʱ,�����һ֡ͼ����ʾ���������,�ڶ�֡ͼ����ʾ���м�,����֡ͼ����ʾ���ұ�,�������ͼ������жϳ�һ�����˺ᴩ�ij���;���¼������ʶ��Ƶ�ʷdz���,�൱�ڴﵽ��1000֡��֡���Ч��,�ܹ������Ԥ�е����˺ᴩ��
(2)������Ч��Ϣ
֡����������������Ч��Ϣ;���¼�����Ǹ����������Ĺ�ǿ�仯�������¼�����
ij��������˾ר�ҽ��͵�:���¼������ʾ����Ҫ��ǰ���˶��������߿�,���ڱ仯�IJ�����Ҫ��������߿�,�����ڲ�������������û�б仯�ġ��൱�ڸ�ͼ������һ��ѹ��,��������Ч��Ϣ,ֻ�����̬��Ϣ,������һ���ʹ�������·����һ������������Ϣ����
(3)������������
֡�����Ҫ��ÿһ֡ͼ����д���,����30֡�����,��10���ڿ��Բ���300��ͼ��,����Ӵ����������оƬ������Ҫ��Ҳ����,�����Ĺ���Ҳ��������Զ���ʻ����,��Ȼ֡���Ҳ����ͨ��һ�ֽ�ע�������Ƶķ���,���Ӿ���Ϣ������һЩ����Ȥ������,��ǰ������Ҫ�����е�ͼ�������Ƚ���һ��Ԥ������
�¼�����ڶ�ά�ṹ����ʾ��һ����ϡ����(����һ��Ŀ����ֻ��t0ʱ�̶���,��֮��һֱ�����ž�ֹ,�Ǿ�ֻ����t0ʱ����ʾһ���¼�,֮����û�����ݲ���),Ҳ����˵,��ֻ��Ա仯�IJ��ֲ��������ź�,����10����ֻ�м�ʮKB������,������Ҫ������������������¼�����������������ֻ�д�ͳCISоƬ��1%,��������,��Ӧ�Ĺ���Ҳ��ϵ͡�
(4)�߶�̬��Χ
ͨ��˵,�߶�̬��Χָ��������ڼ��˹�ǿ�仯��Ҳ�ܱ���ͼ��������ȡ�
֡����Ķ�̬��Χͨ��ֻ�ܴﵽ60dB,���¼�����Ķ�̬��Χ�ܴﵽ120dB,��������ߡ��߶�̬��Χ�������¼�����ڹ��������ع���ȡ�����ͻ��������,��Ȼ�ܹ�������Ч�Ĺ���,Ϊ�Զ���ʻ������һ�ݰ�ȫ���ࡣ
ij��������˾ר��ͨ��һ�����������,˵:������һ�����Ӻڰ�������ʻ��ʱ,��ͨ�������ֹ����ع�,��Ҫһ��ʱ����ָܻ�,��ȻҲ����ͨ���㷨ȥ�˷��������,�����¼�������ⷽ�����ֵø��á���
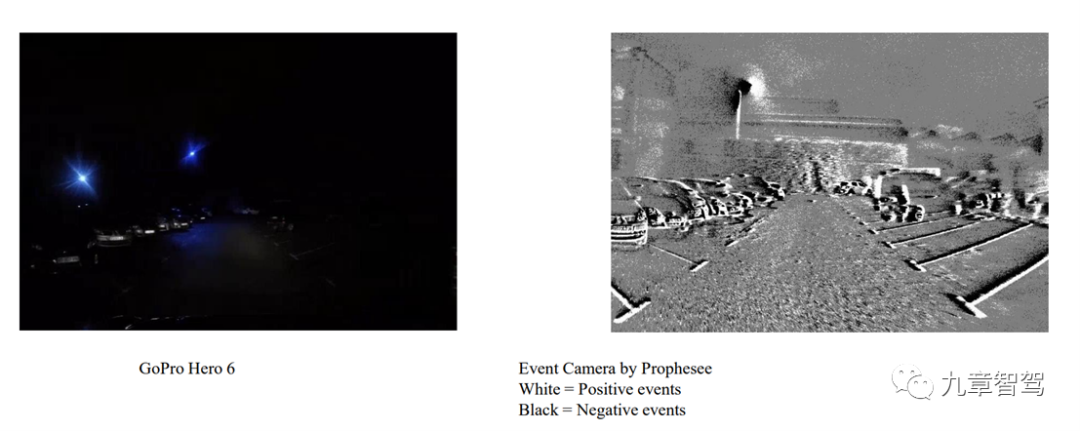
ͼ:�¼�����ڼ���������Ч��ͼ
(��Դ:��Ƽ��ṩ)
1.3 ����ԭ��
���¼��������ι�������?������˵,����Ӧ���������Ĺ�ǿ�仯��������Ԥ���趨����ֵʱ,�¼�����ͻ����뼶�ֱ��ʱ��ʱ���,������첽�¼�����
����ͨ����ͼ��С��ʵ����Ը�ֱ�۵ط���:ֻҪС��仯��ʱ��,�ͻ�����¼���,��С��ֹ��ʱ��,�Ͳ�������¼�����
ͼ:�¼������֡���������źŶԱ�
(��Դ:������Ϣ)
1.4 �봫ͳ֡����IJ���
(1)�й���Ʋ�ͬ
֡�����ͨ���趨�㶨���ʵķ�ʽ,�Ӷ���ȡ��������Ϣ,��ֻ��¼��ÿһ֡�ڸ����ص��ϵĹ�ǿ��Ϣ,������¼��һ���������һ��ʱ���������Ĺ�ǿ�仯��
���¼������¼�����ǹ�ǿ�IJ�ֵ�仯,�Լ����嵽ij����������λ�õı仯,�Ӷ�����һ���¼����IJ�������Ҫע�����,������Ծ�ֹ������,�¼������û���źŷ��ص�;����������˶�������,������������߿�,��������Ӧ�Ĺ�ǿ�仯��
(2)�������Ʋ�ͬ
֡���ʼ���������һ֡һ֡��ͼ��,����ÿһ֡��ͼ����ֳ��dz��ȶ��Ҿ��ȵ���������һ��30֡�������˵,����������һ������ij���ʱ,���������ʱ��Ȼ��ÿ������30���ظ���ͼ������29�������˷ѡ�
��������,�¼��������һ�����¼����,������֡���һ��,���һ��ͼ����Ƶ,����ֻ��¼ij�����ص��Ϸ�����������߸���Ĺ�ǿ�仯,�������ǿ�仯���ź�,�����¼�����������������Ǿ����ȶ��ġ�
��Ƽ��������˽������͵�:��֡����Ķ�����·������ɨ��ķ�ʽ,��һ�־������������������ʽ,�������������ϼ�¼���ص��RGB��Ϣ;���¼������ͨ��AER�ı��뷽ʽ,�����¼���ʱ����������������ʽ,�����¼��������Ⱥ�˳���첽��������
(3)��·��Ʋ�ͬ
�¼�����봫ͳ��֡������,�����ڵ�·���������ȫ��ͬ��,��������������ͼ�������֡�
�ڷ�չ����,�����¼�������������ʹ���,�����¼��������Ϊ���ܹ����¼���������ʵ�ֲ�Ʒ��,��Ӧ���ڸ���ij���,�������¼������pixel�ṹ����ϼ���һ��APS��·��
���APS������,ij��������˾ר�ҽ��͵�:����ν��APSʵ���Ͼ���ij�̶ֳ��ϵ�CIS pixel,�����ṩ�����ο������á���
1.5 ��Ʒ����
��ǰ,�г����������¼������Ʒ��ҪΪ����:DVS��ATIS�Լ�DAVIS,���Ƕ������˲�����Ӿ�����ģ�͡�����,Ҳ��һЩ�������͵��¼����,����CeleX��Vidar,������ҵ���Ľ�������,���������¼��������ҵ����չ�Ͽ�,���Դ˴����ؽ��������ࡣ
��:���ֲ�Ʒ���͵Ļ������
| ��Ʒ���� | DVS (��̬�Ӿ�������) | ATIS (�����첽ʱ���ͼ����) | DAVIS (��̬����Դ�����Ӿ�������) |
| ��� | ���ڵ��¼����,������¼��� | ����DVS�ĸ���,ֻ������¼�����ͬʱ,����Ҷ���Ϣ | ����DVS�ĸ���,��ͬʱ����¼����ͻҶ���Ϣ |
| ��·�ṹ | �ɶ��������������ֵ�·�������Ƚ���(��ֵ�Ƚ������ڲ����ֵ�·)��� | �������������,ӵ�������й��� | ��DVS�����APS�����,������һ���й����� |
| ���� | ��·��Ƽ�,�������С | ���ṩ�Ҷ���Ϣ,�������DAVIS�ϵ� | ���ṩ�Ҷ���Ϣ,����������ATIS��С�� |
| ��ս | ���¼����ݵĿ��ӻ��̶Ƚϵ�,���ṩ��ϸ����ͼ�� | �������ڻ������ȱ仯��Ƶ���ij��� | APS��������DVS������ͬ�� |
(1)DVS(��̬�Ӿ�������)
DVS�����ȷ�չ������һ���¼����,������AER�첽���䷽ʽ�IJ�����Ӿ�����ģ��,���첽ʱ�������źű�ʾ������ǿ�仯,���й�ǿ�仯�IJ���������Ӧ,������ǿ�仯�IJ�����������Ӧ��DVS����Щ�˶��仯��Ϣת��Ϊ�ռ�ϡ�衢ʱ���ܼ����¼�����
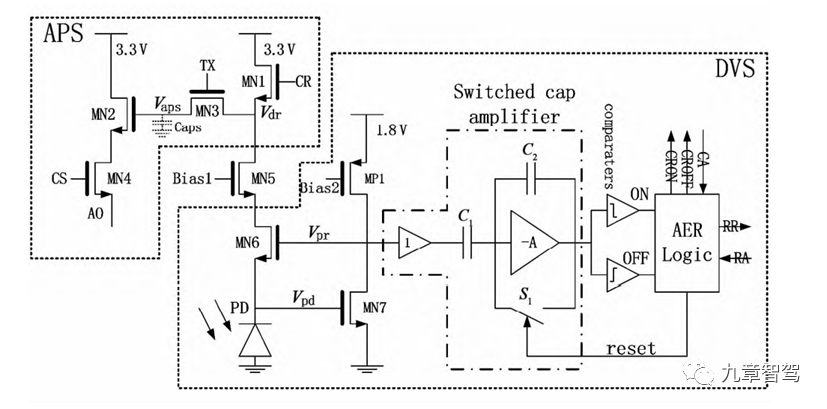
��·�ṹ:DVS���ص�·�ɶ��������������ֵ�·�������Ƚ���(��ֵ�Ƚ������ڲ����ֵ�·)��ɡ�����,������������ܸ�֪��ǿ�仯����ʱ������Ӧ;��ֵ�·���Խ��й��·������źŽ��зŴ�;�����Ƚ�����Ҫ�DZȽϵ�ѹ�ı仯ʵ��ON/OFF�¼�����������
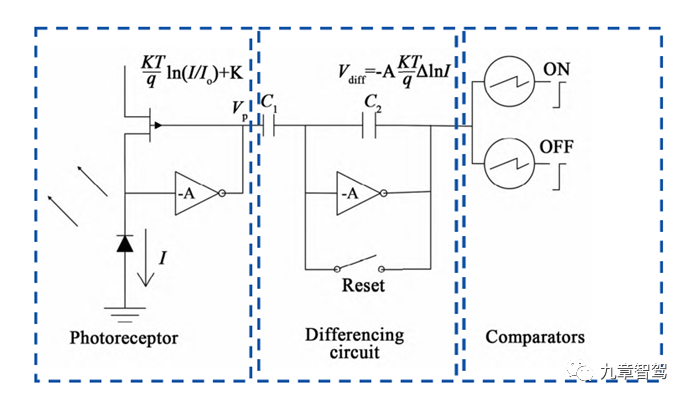
ͼ:DVS���ص�·�ṹͼ
(��Դ:���¼��Ӿ���������չ��״������)
����:��·��Ƽ�,�������С��
��ս:���¼����ݵĿ��ӻ��̶Ƚϵ�,���ṩ��ϸ����ͼ��
(2)ATIS(�����첽ʱ���ͼ����)
ATIS��DVS�Ļ����Ͻ��иĽ������ݵĿ��ӻ�,����ֻ�ڵ�·�����¼��źŵ�ͬʱ,������ǿ������·,�Ӷ����¼��ṩһ���ĻҶ���Ϣ��
��·�ṹ:ATIS���ؽṹ��Ϊ��������(A��B),�����������й���������,A���ְ���������DVS���ؽṹ,���Լ���ǿ�ı仯�������¼�;B���ְ����ĸй���������������ǿ�ȵı仯�������ع⡣
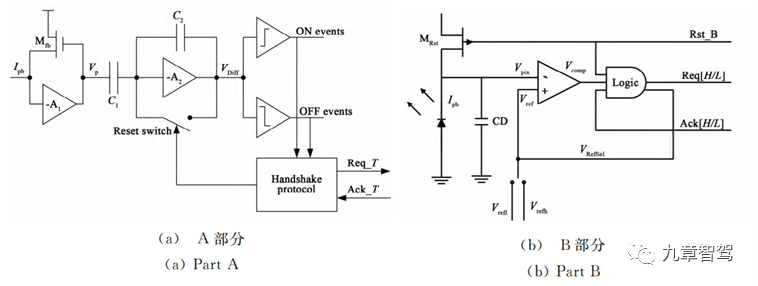
ͼ:ATIS���ص�·�ṹͼ
(��Դ:���¼��Ӿ���������չ��״������)
����:���ṩ�Ҷ���Ϣ,�������DAVIS�ϵ͡���������,����ֱ�ӷ�����һ������,����ֱ�ӻ�ȡ�����ǰ�������лҶ���Ϣ,Ȼ������˶�������,���ڲ����������ź��ϲ��ϸ�����Ӧ�Ҷ���Ϣ��
��ս:�������ڻ������ȱ仯��Ƶ���ij����������ڸ����˶�������,���ڹ�ǿ����������������źŲ������һ��ʱ���ڵ�ƽ����ǿ,���Դ����¼���Ҷ���Ϣ�ع����²�ƥ��������
(3)DAVIS(��̬����Դ�����Ӿ�������)
DAVISҲ����DVS�����ϸ�������,��ͬʱ����¼���Ϣ�ͻҶ���Ϣ,��ATIS����������ֻ��һ���й�����
��·�ṹ:DAVIS��DVS�����APS���϶���,���߹���һ���й�����
ͼ:DAVIS���ص�·�ṹͼ
(��Դ:���¼��Ӿ���������չ��״������)
����:DAVIS��ATISһ��,Ҳ�����ṩ�Ҷ���Ϣ;ͬʱ,DAVIS���ڹ���һ���й���,����������ATIS��С��
��ս:APS��·�IJ����ٶ�Զ����DVS��·,���¶�����������ͬ��������,APS��·�ڸ��ٳ����´�����Ӱ����
������ҵģʽ�뾺�����
2.1 ��ҵ�������θſ�
�¼������ҵ��������봫ͳ֡�����������ͬ��,��Ҫ�����������㲿����Ӧ��(��ͷ���㲿�������ϲ��ϡ�ͼ����оƬ��)��������ģ�鹩Ӧ����ϵͳ�����̵ȡ���������������
��ҵ���еIJ�֮ͬ����Ҫ����ͼ����оƬ���㷨����,������ʺ��¼������оƬ������оƬ�����ʺϵ��㷨�������������硣
2.2 ��ҵģʽ
��ǰ�¼��������ҵģʽ��û����ȫ����,��ҵ���ĸ�����Ҷ���̽���ʺ��Լ���ҵ��֮·,�����ͿƼ���ҵ�ʹ���Tier 1��ҵ����������ʵ�����,���в�ͬ����ҵģʽ��
(1)�����ͿƼ���ҵ���������ṩһ���������Ϊ��,���г��ڷ����רע��������ҵ��
�Ӷ���������,�������¼������ҵ��δ����ǰ, �����ͿƼ���ҵ���ҵ����ʵĹ�Ӧ��,��������ͨ���Ḳ��������ҵ������,����оƬ���㷨��������ģ�顣����һ��оƬ��˾,���������ģ��������ĺ������,������Լ���оƬ,�����տͻ���ͬ�������ض�Ӧ�ó����µ�Ӧ�á�
һ����,�ͻ���û���ҵ��¼�������ʵ���س���ǰ,���Dz���Ͷ�������������������������㷨�Ŀ�����;��һ����,�¼�����㷨���ż��ϸ�,��Ӧ�������㷨����Ҳ��Ҫһ���ľ�������ݵĻ��ۡ�
���г�������,��Щ�¼�����ij�����ҵ���ǻ�������Ӳ�������ģʽȥ��չ,������ֻ���Լ��ó��IJ���,������������ҵ�Ĺ�ҵ�������Խ��Խ�ߺ�,��ҵ�ֹ���Խ��Խ��ȷ��
(2)����Tier 1��ҵ,��������,ֻ���ṩоƬ,�����㷨��������ģ����������������
һ����,���г�����������������,�ṩ���������ʹ����ijɱ����,�������г��ƹ�;��һ����,���ڲ�ҵ��δʵ�ֱ���,��������˾Ҳû�������ṩ��оƬ���ȫ������
2.3 ����̵�
���ļ�Ҫ�������˹�����ļ��ҵ����¼������Ҽ����ֵ����¼������Ʒ����Ҫ������Ϣ����������:
��:��������̵�
| ������� | ���� | ���� | Prophesee | iniVation |
| ���� | �ձ� | ���� | ���� | ��ʿ |
| ����ʱ�� | 1946 | 1969 | 2014 | 2015�� |
| ��ҵģʽ | �ṩоƬ | �ṩоƬ | �ṩ��� | �ṩ��� |
| ��Ҫ��Ʒ | IMX636��IMX637(оƬ) | Gen1~Gen4(оƬ) | Metavision��������EVK������ | DAVIS346��DVXplorer ?Lite |
| ���ʽ� | ��IPO���� | ��IPO���� | C�� | - |
| Ͷ�ʷ� | - | - | С�ס�Ӣ�ض��������� | ���� |
| Ӧ������ | ��ҵ�������ˡ����������С���Ϸ | ���ڶ�λ��ADASϵͳ | ���ܼ�ʻ��ҽ�ơ���ҵ�Զ����� | ���������Զ���ʻ�������ˡ���ҵ�Ӿ� |
| ������Դ:��ع�˾�ṩ��������Ϣ���� | ||||
��:��������̵�?
| ������� | ��˼��о | ��Ƽ� | о�ؿƼ� |
| ���� | ���� | �Ϻ� | �Ϻ� |
| ����ʱ�� | 2019 | 2021 | 2017 |
| ��ҵģʽ | �ṩоƬ��һ��������� | �ṩоƬ | �ṩоƬ |
| ��Ʒ | ALPIX(оƬ)��ALPIX-Titlis�������� | YK-D-RH02(оƬ) | CeleX-V |
| ���ʽ� | Pre-A�� | ��ʹ�� | �ѱ��չ� |
| Ͷ�ʷ� | �пƴ��ǡ����봴Ͷ������ | - | �ٶȡ�Τ���ɷ� |
| Ӧ������ | ���������������ѵ��ӵ� | ��������Ӧ�� | ���ڼ�ʻԱ���(DMS)�ͼ�ʻ����ϵͳ(ADAS) |
| ������Դ:��ع�˾�ṩ��������Ϣ���� | |||
��:�����¼������Ʒ����?
| ��Ʒ�ͺ� | EVS-IMX636 | EVS-IMX637 | DVS-Gen4 | DAVIS 346 | CeleX-V |
| ������ | ���� | ���� | ���� | iniVation | о�ؿƼ� |
| ������� | 2021 | 2021 | - | 2020 | 2018 |
| �ֱ��� (pixels) | 1280��720 | 640��512 | 1280��960 | 346��260 | 1280��800 |
| ��̬��Χ(dB) | ����86 | ����86 | 90 | 120 | 120 |
| ����(mW) | - | - | 140 | - | - |
| ����оƬ�ߴ� (��m����m) | 4.86 | 4.86 | 4.95 | 18.8 | 9.8 |
| ������Դ:��ع�˾�ṩ��������Ϣ���� | |||||
������ҵ��ǰ��
3.1 ����:�Զ���ʻ�е���س���
3.1.1 �ʺ���صij���
�¼����������������Ӧ�ٶȿ졢�߶�̬��Χ��,����Ӧ�����³���:
��һ,���������еĹ�̽ͷ����ͳ֡�������Ժ���Ĺ�̽ͷ����ʱ,������������Ӧ,���¼�������Ը���ĸ�֪��Σ���źš�
�ڶ�,���ٳ����µı��ϡ����糵���ڸ���·�Ͽ�����ʻʱ,����ǰ��·����һ����̥,֡������ܼ�ʱ������Ӧ,���¼���������������ĵ�ʱ��������,����ʶ���ǰ������̥,����ʱ�������϶�����
����,���߹������߹����ij�������������ҹ�Ļ�����,֡���������Χ�����Ĺ��߶���ʶ����Χ����,���¼������Ȼ������Ч��ʶ����Χ���
����,��ǿͻ���Ϊ���Եij��������糵��������������,��Ը��ع�ij���,֡������ܵ��߱����Ӱ��,�Ӷ�����ʧЧ�Ĺ���,���¼���������ܵ�Ӱ�졣
3.1.2 ���ʺ���صij���
�¼�������ʺ���صij���,��Ҫ���ڳ���������ijЩ������,���糵��ǰ�������������ڴ������·���ٻ���һЩ��������������,������ꡢ��ѩ��ɳ���ȡ�
�������ֳ�����,ǰ����Ŀ���ﶼ�����������������˶����ص�,�����¼���������ܶ���Ч����㡣
����һЩ�Զ���ʻ��ҵ�߽���ʱ,������Ҳ�ʵ�:���dz����ڵ�·����ʻʱ,��Χ�����忴��ȥ�����ƶ�,�Ƿ�˵���¼�������ʺ�Ӧ�����Զ���ʻ?��
�Դ�,ij�¼���������ר��˵:��������Ե��ƶ����й��ɿ�ѭ��,��Χ�����嶼������Գ�����һ���ٶ��ں���,������ٶȾ��dz�����������ʻ�ٶ�,�����ں�̨��������ʱ,ͨ��ijЩ�㷨�������������ٶ���Ϊһ������,�Ӷ����˵�һЩԭ����ֹ�����塣��
3.2 ��ҵ���д��ڵ�����
3.2.1 �����������ս
(1)��ʶ�����Ŀ����
֡����������֡ͼ��,������ӵ���˳����Ӧ�úͱ궨���ݿ�;���¼����ֻ�ܸ����Ƚ�ԭʼ��������Ϣ,����Ŀ������ⲿ����,����Ҳû��һ���Լ����������ݿ���ƥ����Щ������Ϣ��
����Ҫ�õ������ε���Ϣ,����Ҫ֡�����Ϊ����,�����ȴ��¼����ʶ���ǰ��ѩ��Ͳ����״,�����ھ����������㷨��ѵ����,���ָ���״��֮ǰ��ѩ��Ͳ����,�Ӷ��жϳ�ǰ�����������ʲô��
(2)ȱ���ʺϵ�оƬ���㷨
��ǰ�¼����ʹ�õ���ԭ��֡�����һ���ܹ���ϵ(������ʹ�õ�оƬ���͡��㷨ģ�͵�),������֡ͼ��ļܹ���������ȫ�������¼���,�����еĴ��¼������Ʒֻ�����˼ļܹ�ƽ�ơ������ߵĹ���ԭ����ȫ��ͬ,��ֻ�Ǽļܹ�ƽ��,����ͬ��һ̨��ͨ�Ľγ�����װ��һ�������ϡ�
��һ,���ʺ��¼������оƬ����������оƬ��
Ŀǰ�¼�����õ���Ҫ�Ǵ�ͳ��CIS��ͼ����оƬ,��Ҫ�Դ���֡ͼ��ķ�ʽ�������¼���,���ߵ����϶Ƚϵ͡�
������оƬһ��ָ����̬оƬ,����һ�ֲο�������Ԫ�ṹ�����Ը�֪��֪��ʽ����Ƶ�оƬ,ּ��ͻ�ơ���Bŵ����ƿ����,��ʵ���������Եij����ĺͲ�����Ϣ��������,����һ������,�dz�ƥ���¼���������ܡ�
��ǰ���Լ�����Ȼ����̽����,��δ���ģ��ҵ������Թ��ڵĽ�����˵,���������оƬ�������ߵø���һ��,����Ӣ�ض���ʱʶ�Ƽ���,��Ŀǰ���ڵ�����оƬ��������Ҫ����ѧ���Ρ�
�ڶ�,���ʺ��¼�������㷨Ϊ���������硣
�첨˵��:���¼�������㷨��һЩ�����������,���ǵ�ǰ���ͨ�õĻ��ǻ���frame������,���ݵ�ϡ���Ի�Դ�ͳ�������㷨����Ӱ��,������Ҳ��Ŀǰ�¼����ݱȽ��Ѵ����ĵط�����
����������������¼��������첽���㡢�����ĵ��ص�,���������źŵIJ������¼��������ʱ������¼��������ʽ�dz����ϡ�����,Ŀǰ������������Ȼ����ѧ����,��ȻҲ�в�����ҵ�ڳ��Ըü���,���������һ��������Ŀ,��û���ҵ��ܹ����ģӦ�õij�����
3.2.2 ���̲������ս
(1)��ֵ�趨�Ѷȸ�
��ֵ�Ǻ����¼�����ı�,��Ŀ����Ĺ�ǿ�仯��(�����ɵ͵������ɸߵ���)����Ԥ�����ֵ�ͻ�����¼����������ԭ����:ͨ��������ֵ���Ըı�������������ж�,����ֵԽ��ʱ,��������Խ������,�ܲ������¼�Ҳ��Խ��;����ֵԽСʱ,�ܲ������¼�Ҳ��Խ�ࡣ
������ε�����ֵ��С,ɭ������CEO�첨˵��:���������������ֵ��Ҫ�����峡������,���糵�ڳ������߸��ٵȲ�ͬ������,ÿ��ʱ�̵���ֵ�趨���Dz�ͬ�ġ�����ֵ�Ķ���,ȡ�������뿴����Щ����,�뿴��һЩ,�����뿴��һЩ����
һ����,�ڲ�ͬ�ij���������,��ֵ�ij�ʼ״̬�趨Ҳ��ͬ,����������ֵ��Ƚϸ�,�����ϵ���ֵ��Ƚϵ͡�
��һ����,�¼������ʹ�ù�����,������ֵͨ���㷨��϶�̬����,�γ�һ������Ӧ�ع��̡�
�����Զ���ʻ����,��������趨��ֵҲ��һ������:һ����,������ʻ������,����Χ������ʼ�ձ���������˶�,������������ǿ���ȵı仯�ͻ�һֱ���¼�����,��ʱ��ֵӦ��Խ��,�Ӷ��������;��һ����,�¼����ݵ��ص��Ǿ���ϡ����(����һ����ֹ������,�¼����ֻ����t0ʱ�̲����¼�,֮��Ͳ������µ��¼�����),�����లȫ�ĽǶ�����,Ϊ�˽������ݹ��ٵķ���,��ֵӦ��ԽС��
�ܵ���˵,��ֵ��С���趨�Ǿ����¼�����Ƿ������Զ���ʻ���úõĹؼ�һ��,����Ҫ�����������ݵĻ��ۡ��㷨���Ż����豸����ʱ��̬�ص�����ֵ��
(2)���ݴ���Ч�ʵ�
֡����������ݵ�ԭ��,���ڵ�����ͼ�������˺������������;���¼���������ݴ���ԭ���dz���һ���¼��ʹ�����һ���¼�,Ȼ����ٵ��������ߡ�
����ǰ����ҵӦ����,�г��ϻ�û������¼����ݴ����ij��췽��,�������е��¼������Ʒ���Dz���֡��������ݴ�����ʽ�������¼����ݡ�
������˵,��һ���¼������60����,ֻ���ڵ�60��Ų���һ���¼�����ʱ,���ǰ���30֡��֡��ȥ�����¼�����,����Ҫ��60��������и��ÿ30��һ������,Ȼ���ڴ�ͳ���������㷨ģ���½�������,���Է���,ǰһ��30�����ݲ�û���¼�����,���ڴ�ͳ����ģ����ǰһ������Ҳ����Ҫ��������,���Υ�����¼�����Ĵ�������ԭ��,����ɥʧ�˵�ʱ�ӵ����ơ�

ͼ:�¼������֡��������ݶԱ�Ч��
(��Դ:��Ƽ��ṩ)
(3) �������������ںϵ���ս
�����¼�����������ṩ���ε�����,�����ࡢ���١����������ɫ��,ֻ�ܻ�ȡ�����������,���Ե�����ʹ��һ���¼�������������Զ���ʻ�����㹻�����లȫ,���������������ںϲ��Ǹ��õĸ�֪������
���������������ں�ʱ,��Ҫ���¼������������������źŽ���ͬ��ƥ�䡣
���¼�����뼤���״���ں�Ϊ��,�¼�����뼤���״ﶼ��֡�ĸ���,�����״�Ҳ����ijһ�㶨֡�ʷ�����ơ�����Ҫ��������������ͬ������,����Ҫ������������:һ����,ʱ�����һһ��Ӧ;��һ����,��Ҫ�����ñ궨�Ļ�����,���¼���������ص���ӳ�䵽�����״�ĵ����ϡ�
3.2.3 ��ҵ�������ս
����ҵӦ�ò���,�¼������Ҫ����Ӧ�ó������ٺ�Ӧ����ϵ����������⡣
һ����,Ӧ�õij����Խ��١������������ϵԽ��Խ�����������,��ǰ�¼�����ܸ��Զ���ʻ�ܴ�����������ֵ��С,������ֻ��ͨ���������������ں�ʹ�ò��ܷ��Ӹ���ļ�ֵ,����Ϊ���ʹ������ڽ����г�ǰ,�¼������Ҫ���������ij������ܿ���,�Ӷ������ھ��һЩ����DZ�ڼ�ֵ��
��һ����,��Ӧ����ϵ�����졣�¼�����������ڷ�չ��,��Ʒ�ı����̶Ƚϵ�,���ƹ�����в��ò��ṩһ���������,���²�Ʒ�ijɱ��ϸߡ����¼�������㷨������Ӧ��Ϊ��,ij�Զ���ʻ��˾������ר���ᵽ,���е��¼������ص��㷨������,��Ҫ����demoΪ��,û������ض�����ȥ�������㷨�Ŀ�����
����
�ܵ���˵,�¼�����������Ͼ߱�һ��������,����ijһ���ܳ�Ϊ�Զ���ʻ������һ��ȫ�µĴ�����ѡ��,���ֽμ�����������ҵ���������Ҫʱ��ȥ������ĥ��
ij�¼���������г�������˵��:����ͬӦ�������ڵ�DZ�ڿͻ�����ʶ���¼�����Ķ�������,������Ϊһ���¼���,�����εķ�չ��������Ҫһ��ʱ��,��Ҷ����ڴ������ĸ������졢�۸�Ľ�һ���½�,�����ܹ��зḻ�����졢�ɿ��������㷨��Ԥ��2023��2024���,�����¼�������̻Ὺʼ��һЩ�����ͺ�ȥ���һЩӦ��,���¼��������Ҫ�ڲ�Ʒ�Ŀɿ��Է���õ���һ������֤����
�����
��1���Զ���ʻ��֪����ĸ���:����֡���¼��������������AIоƬ���ش��
https://mp.weixin.qq.com/s/iEBPf4VZYUv-hYLnYdJcYg
��2���¼����,�Զ���ʻ��֪�ĸ���?
https://mp.weixin.qq.com/s/sF4eHls3FMNbktXXCcV_zw
��3�������¼����Ӿ�����������Ӧ������,����,����
��4������̬�Ӿ����������о���չ��Ӧ������,�����,������
��5���¼��Ӿ���������չ��״����,��Ӧ��

