之前出了这一篇文章,Apollo规划代码ros移植-路径规划可跑工程代码编译版本分享1。框架可以实现基于Lanelet高精度地图的路径规划,可以直接编译运行,跟其他模块结合后,可应用于实际车辆。今天,先介绍一下EM_Planner的Ros移植。当然,后面还会出变道和超车的算法移植,这次的EM_Planner,我们从最简单的情况,暂时考虑单车道规划和避障,对于代码更新,我都会第一时间在交流群分享,所以想进群学习的人,可以私信我。代码有详细注释,而且有群,大伙志同道合,一起学习交流。工程不易,自我感觉比规划模块比较难移植的代码,比那些在simulink上搞控制等难多啦。
工程功能
1. Lattcie规划(单车道)
2. EM_planner规划(单车道)
3. frenet采样规划(s/t,d/t采样)
4. 倒车规划(根据地图特点解决掉头的麻烦)
5. 避开静态障碍物(动态效果也还可以)
6. Apollo的参考线平滑(ipopt和osqp二次平滑)
7. 简单的stanly控制算法
EM规划器
首先,规划的方法是先独立对所有参考线进行单独规划,每条参考线可以得到一个最优的行进路线;最后综合所有参考线的最优行进路线,选择"全局"最优的路线。EM规划器在最新的Apollo6.0里面在PublicRoadPlanner里面,也就是名字全改了,但是问题不大,我们就把核心代码提取出来用。现在分析单个车道的规划过程:
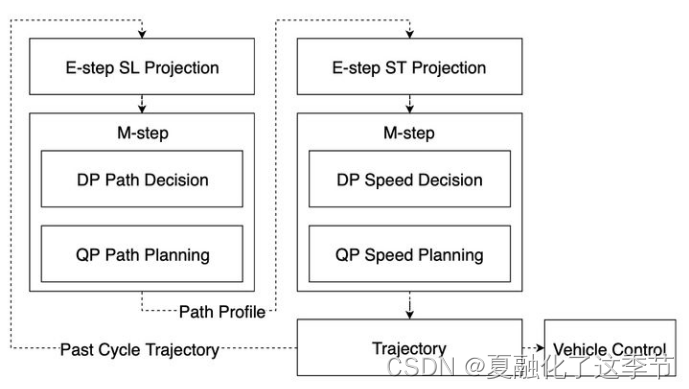
首先,要明白SL和ST:
SL投影:障碍物投影到Frenet坐标。
静态障碍物:直接通过Cartesian-Frenet 转换(笛卡尔坐标到F坐标)。
动态障碍物:在Apollo中通过障碍物移动轨迹描述,结合上一个cycle计算得到的轨迹,可以评估动态障碍物和ego car之间的在不同时间点的位置关系。其中两者重叠的部分会被标记在F坐标中。(由于动态障碍物往往会导致闪避nudge,所以SL投影里只会考虑低速和靠近中的障碍物)
ST投影:
根据生成的path,将所有障碍物(包含高速的)投影到station-time frame,这个ST图是基于参考线做的,但无论是障碍物的轨迹,还是自车的轨迹,都是基于每条path来存储及对比是否重叠的以及何时重叠的。如果障碍物轨迹与规划轨迹重叠,便标记出这个区域。
1.EM模块输入:
(1).感知模块Perception和预测模块Prediction得到的障碍物以及未来时间(e.g. 5s内)的运动轨迹
(2).当前路况,禁停区、减速带、停车标志、人行横道等等
(3).本车状态
(4).参考线 ReferenceLine
从参考线提供器ReferenceLineProvider可以看到,当无人车面临变道时,就会存在多条参考线(变道时间可随机扰动,变道早可能进入车道1,变道晚就可能进入车道2)。那么EM规划器就需要计算每条参考线上的最优行驶路径,最后进行综合,得到开销(也就是cost)最小的一条路径。这里,我们从最简单的单车道避障开始学起。
2.EM模块步骤:
(1)路径规划的DP:
EM planner中,路径的选择是基于S-L坐标系进行的,主要分为以下几个步骤:
a.道路撒点
撒点规则主要由以下几个方面确定:车辆的宽度,车辆的位置,车道宽度,车辆速度,撒点的最大步长(S和L方向),撒点的最小步长(S和L方向),撒点的最小长度,撒点的最大长度等。如下图,定义level数量和间隔,再定义每层level的采样数量。
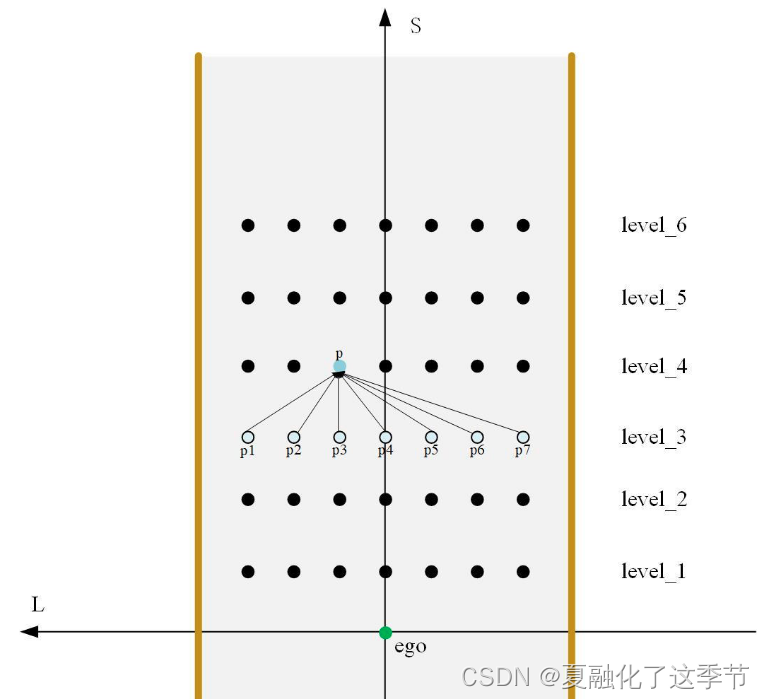
b.利用DP生成Cost最小的路径。
总结就是:撒点,会得到图中一列列黑色的点。forward过程,相邻两列之间的采样点通过五次多项式进行连接,并计算cost、更新父节点。backword过程,顺藤摸瓜,找到cost最小的路径。
(2)路径规划的QP:
S-L域路径规划的QP过程主要进行曲线的平滑,这个曲线平滑的思路,很巧妙的将离散点转换为连续的多项式曲线表达式,速度的非线性优化NLP过程中,就用这个思路把路标点中离散的曲率kappa拟合成了一个关于路程S的连续形式的函数,以便计算向心加速度时使用,速度的上下界也是用这个思路从离散转连续的。通过DP过程可以得到采样点中最优的一串点,虽然DP过程是用五次多项式连接这些点,但是还不够平滑,这时候就需要对这串离散的点平滑一下。
这里遇到了太多坑,虽然说关于二次规划qp的原理有很多,甚至官网也有,自行百度。简单来说,就是建立优化目标函数,和建立边界约束等各种约束,我代码里有学习注释。
第一个坑就是,使用的求解器是qpoases,而不是Lattice二次规划的osqp,虽然都是二次优化库,但是写法不一样。第二个坑就是,在Apollo6.0版本里面一开始找不到路径规划DP输出的路径是怎么样输入给QP的,后面发现6.0的DP弃用了,直接使用了类似Lattice的二次规划进行求解。接着,在3.5里面看到使用了分段sqp优化。先上图给大家看看:
路径DP为绿色,QP为红色:
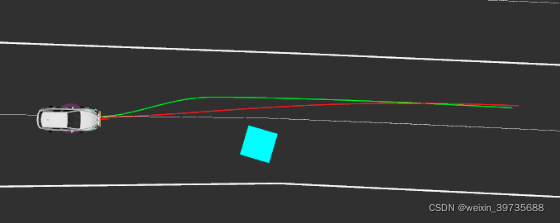
当然,这里有很多参数可以调节,来设置轨迹的样子,具体可以下载我的代码自己学习调参。
个人见解(非正确):
Apollo6.0的路径QP是直接跟lattice的二次规划一样,这么说来,DP好像没什么必要。
(3)速度规划的DP:
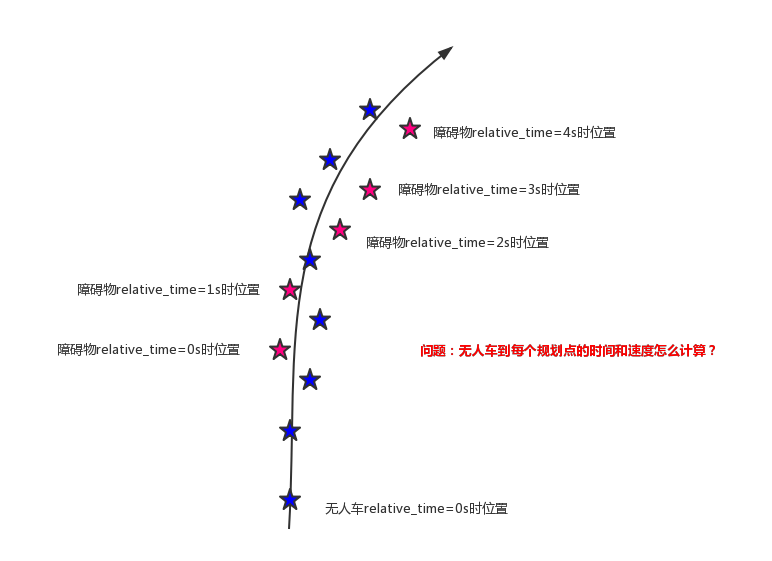
在路径规划中,已经给出了一条从规划起始点到规划终点开销cost最小的路径,如下图的蓝色星星组成的路径,每个蓝色的路径点都有相对于参考线的累计距离s和侧方相对距离l。那么剩下最后一个问题:每个规划点的速度怎么设定?换句话说无人车应该在什么时间点到达轨迹点?这就需要考虑障碍物在每个时间间隔的位置。
与路径DP过程的区别:
a.多了剪枝操作。
b.不用五次多项式连接两点计算EdgeCost。
c.回溯终点的选择,遍历每一列找到best_end_point,因为可能在最大采样时刻前就已经到达终点。
与3.5版的代码相比,新版代码在对s采样稍微复杂一些,不再是均匀采样,而是分为密集和稀疏两种采样。在应用过程中,为方便起见,可以采用老版代码中均匀的采样方法。
6.0版本的采样:
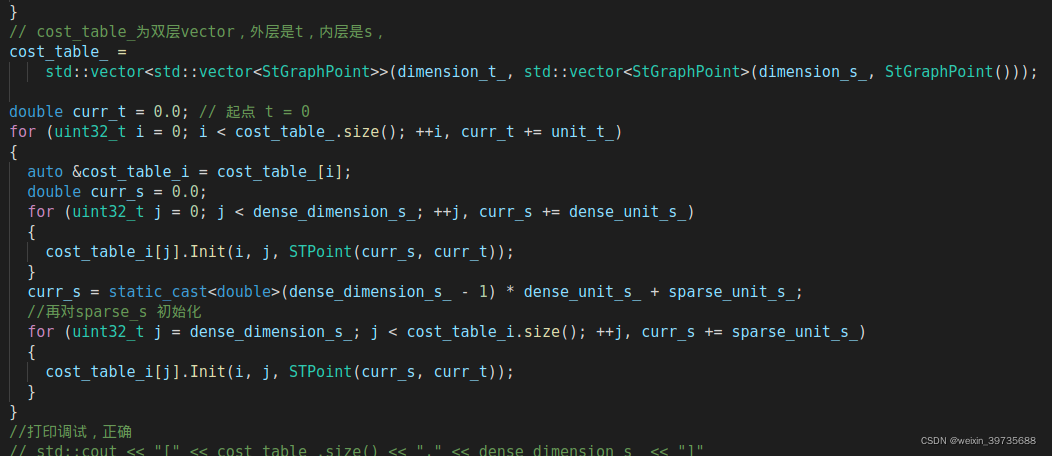
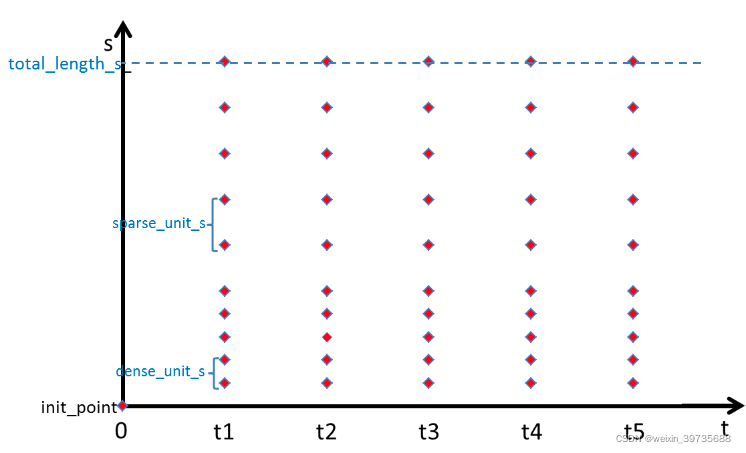
采样的时候横坐标是t,纵坐标是s,可以想象一个图,在每一t时刻(从0开始),采样很多个离散的s值。采样函数如图,其中,密集采样点的个数dense_dimension_s_、密集采样点的单位距离dense_unit_s_、稀疏采样点的单位距离sparse_unit_s_是事先设置好的。total_length_s_是DP Path中规划出的路径的长度,因此,稀疏采样的长度sparse_length_s就是总的路径长度total_length_s_减去密集采样点的距离。
采样示意图:
3.5版本的均匀采样:
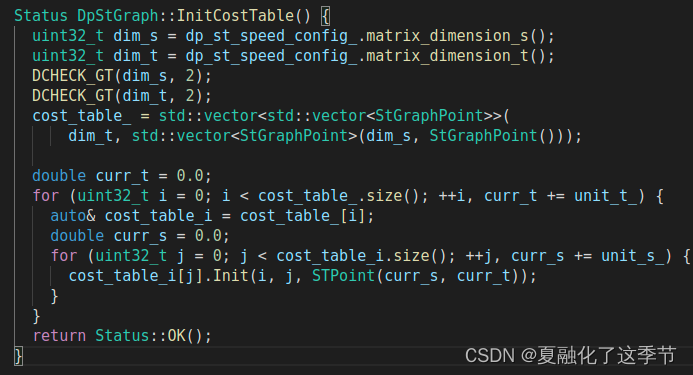
一看代码,我选择老的版本哈哈哈。工程代码里面两个版本的采样都有,3.5/5.0在dp_st_graph.cpp,6.0在gridded_path_time_graph.cpp。
(4)速度规划的QP:
动态规划版本的速度规划器对无人车的速度v、加速度a以及方向theta等信息处理能力较弱,只能通过临近几个st节点来估测,存在偏差。而基于二次规划QP的速度规划器,实用多项式拟合st点,得到多项式函数,这时候就可以根据导数求速度,二阶导求加速度等信息。
移植的时候碰到大问题,速度的DP规划感觉没问题,但是呢,使用3.5版本的sqp优化之后的速度,居然是减速的,搞不明白为什么,还在研究。
然后我先使用了6.0的qp优化。
总的框架
1.路径规划DP,Apollo6.0的采样,参考文章:
Apollo 6.0的EM Planner (1):路径规划的动态规划DP过程.
2.路径规划QP,Apollo3.5的SQP优化,参考文章:
Baidu Apollo代码解析之EM Planner中的QP Path Optimizer 2
3.速度规划DP,Apollo6.0的采样,参考文章:
Apollo 6.0的EM Planner (3):速度规划的动态规划DP过程
4.速度规划QP,Apollo6.0QP优化,参考文章:
Apollo 6.0的EM Planner (4):速度规划的二次规划QP过程
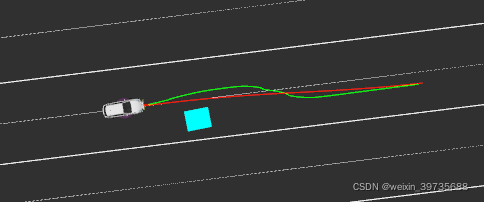
单车道的EM规划器+静态障碍物的Ros移植效果
多车道即需要考虑换道场景,这时候需要从起点开始,沿着多条参考线进行轨迹规划,选择最优的,这里暂不考虑。动态障碍物会比静态复杂一些,也暂不考虑,让我跟大家先一起入门。
感谢
我还参考了这些大佬的文章,感谢这些博客的博主对我移植的帮助,非常感激!大家原理上面可以看这些大佬的博客代码解析。
链接:
【最新版】Baidu Apollo代码详细解析――EM Planner中的DP Speed Optimizer.
Baidu Apollo代码解析之EM Planner中的QP Speed Optimizer 2.
Lattice与EM_planner的区别
摘自:Baidu Apollo代码解析之轨迹规划中的轨迹评估代价函数.
从公式来看,Lattice是在已知轨迹的情况下评估,考虑的因素更为具体和全面。而EM是在轨迹未知的情况下求轨迹,考虑的因素更单纯,公式形式更简单。总体来说,二者的代价函数均是用来解决同一问题的,因此考虑的因素大体一致,轨迹的平滑、避免碰撞、与参考方程(参考线、前步输出、目标速度等guidance)吻合等因素均纳入了考虑。但是,二者的代价函数没有必然联系。评估轨迹cost 时,可以结合局部的cost 和全局route 层面的cost,这样规划和决策会有一定程度的结合
未来计划
有空的话,按时间优化代码和添加功能:
1.移植Apollo的混合A星。
2.优化动态障碍物的避障。
3.carla与我的工程联合仿真。(如果carla跑不起来就换成commonroad)
4.换道与超车。

