????????本节详细介绍雷达点云前视图(FV, Front View)的基本原理和计算过程,含原理介绍、代码、数据和可视化效果。
1 前视图基本原理
????????雷达在工作时通常是围绕一个轴进行旋转扫描。对于单线激光雷达来说,旋转扫描数据可以得到一个圆形投影;而对于多线激光雷达来说,旋转扫描数据可以得到一个圆柱形投影。
????????雷达点云中点的距离有远有近,那么如何投影成一个圆柱面呢?答案是按照方向上来投影。每次采集一个点的方向都是不同的,也不会出现远近重叠。因此,圆柱面投影是按照方向进行投影,方向由雷达的照射角度来进行表征。
2 圆柱投影几何解释
????????以KITTI激光雷达点云为例,x表示车辆行驶方向,y表示车身方向,z表示高度方向。定义xy平面的方向角为θ,z方向上的方向角为φ。如下图所示,θ由反正切arctan(y, x)得到。在numpy中,arctan2将反正切函数的值域从(-pi/2, pi/2)变换到(-pi, pi)。
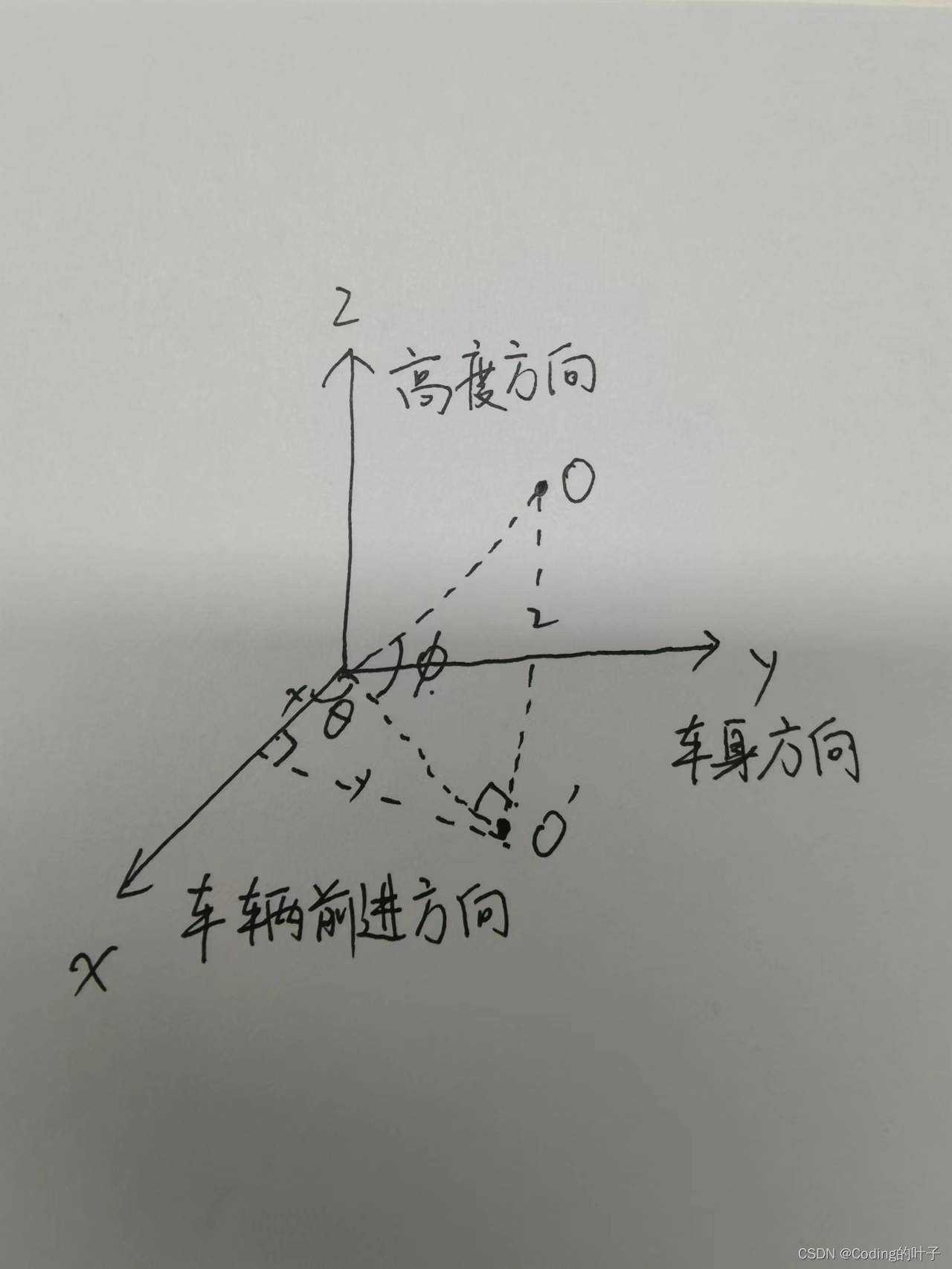
?????????从图中可以看到,车正前方(x轴方向)角度为0,正后方右侧角度为-pi,正后方左侧角度为pi。那么水平扫描方向认为是从车身正后方逆时针开始旋转一周,起始位置为投影后图像水平零点,终止位置为投影后图像的宽度。将圆柱投影面展开矩形图像平面的方法,相当于从正后方将圆柱面剪开得到。
????????同样道理,垂直方向上的角度φ由反正切arctan(z, sqrt(x^2+y^2))得到。

?????????KITTI用到的激光雷达水平方向上的角度分辨率为0.09度,总视角为360度。垂直方向上的视角为26.8度,共64线,分辨率约等于0.42度。(分辨率取值的描述可能有误,欢迎指正。)那么,投影后FV图像的坐标img_x等于θ除以水平角度分辨率;img_y等于φ除以垂直角度分辨率。雷达参数如下:
1 × Velodyne HDL-64E rotating 3D laser scanner,
10 Hz, 64 beams, 0.09 degree angular resolution,
2 cm distance accuracy, collecting ~ 1.3 million points/second,
field of view: 360? horizontal, 26.8? vertical, range: 120 m3 前视图获取步骤
? ? ? (1)读取雷达数据,Nx4,x、y、z、r。
? ? ? (2)计算每个点的方向角,θ、φ。
? ? ? (3)根据方向角和角度分辨率计算前视图图像坐标,img_x、img_y。
? ? ? (4)用雷达反射强度r作为前视图的灰度值。
? ? ? (5)结果可视化。
4 参考代码
? ? ? ? 数据采用的是Mini Kitti数据集,详细介绍和下载地址请参考:KITTI数据集简介 ― Mini KITTI_Coding的叶子的博客-CSDN博客。
# -*- coding: utf-8 -*-
"""
乐乐感知学堂公众号
@author: https://blog.csdn.net/suiyingy
"""
import os
import cv2
import numpy as np
def test():
lidar_path = os.path.join('./data/KITTI/training', "velodyne/")
lidar_file = lidar_path + '/' + '000016' + '.bin'
#加载雷达数据
print("Processing: ", lidar_file)
lidar = np.fromfile(lidar_file, dtype=np.float32)
lidar = lidar.reshape((-1, 4))
v_res = 26.8/64
h_res = 0.09
# 转换为弧度
v_res_rad = v_res * (np.pi/180)
h_res_rad = h_res * (np.pi/180)
angels = np.zeros((lidar.shape[0], 2))
angels[:, 0] = np.arctan2(lidar[:, 1], lidar[:, 0])
angels[:, 1] = np.arctan2(lidar[:, 2], np.sqrt(lidar[:, 0]**2+lidar[:, 1]**2))
img_x = angels[:, 0]/h_res_rad
img_x = img_x.astype(np.int)
img_x = img_x - min(img_x)
img_y = angels[:, 1]/v_res_rad
img_y = img_y.astype(np.int)
print(min(img_y), max(img_y))
img_y = img_y - min(img_y)
img_y = max(img_y) - img_y
print(min(img_x), max(img_x))
print(min(img_y), max(img_y))
fv_img = np.zeros((max(img_y)+1, max(img_x)+1))
fv_img[img_y, img_x] = lidar[:, -1]
cv2.namedWindow('FV', 0)
cv2.imshow('FV', fv_img)
cv2.waitKey(0)
if __name__ == '__main__':
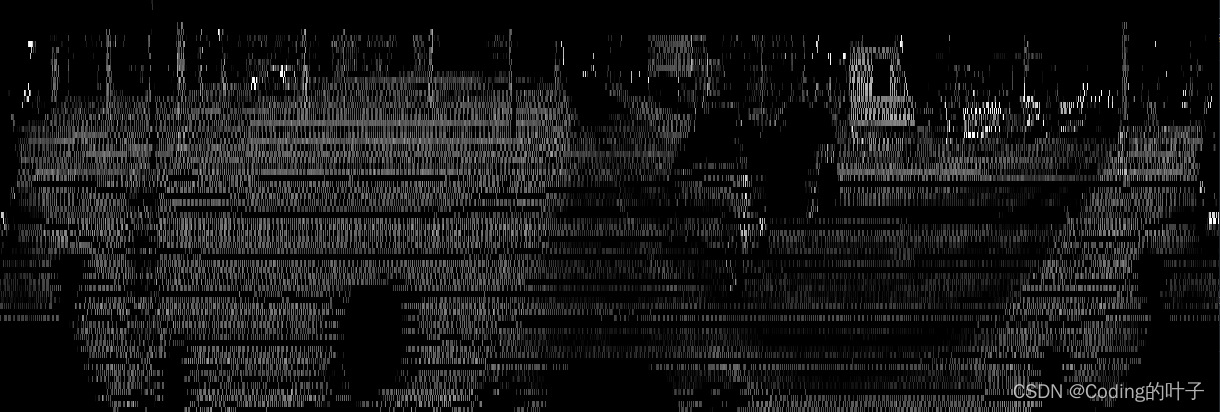
test()5 前视图效果
6?python三维点云从基础到深度学习_Coding的叶子的博客-CSDN博客_python三维点云重建从三维基础知识到深度学习,将按照以下目录持续进行更新。更新完成的部分可以在三维点云专栏中查看。https://blog.csdn.net/suiyingy/category_11740467.htmlhttps://blog.csdn.net/suiyingy/category_11740467.html1、点云格式介绍(已完成)常见点云存储方式有pcd、ply、bin、txt文件。open3d读写pcd和pl https://blog.csdn.net/suiyingy/article/details/124017716
https://blog.csdn.net/suiyingy/article/details/124017716
文中介绍如有问题,欢迎指正,谢谢!
更多三维、二维感知算法和金融量化分析算法请关注“乐乐感知学堂”微信公众号,并将持续进行更新。

