《动手学ROS2》9.5为FishBot添加添加激光雷达传感器
本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

9.5为FishBot添加添加激光雷达传感器
本节我们来认识一个新的传感器,该传感器在自动驾驶、室内导航等应用非常多,比如扫地机器人上就是用的它作为感知环境的重要工具,该传感器是激光雷达。
1.激光雷达介绍
激光雷达(Light Detection And Ranging),缩写LiDAR,翻译一下叫――激光探测与测距。
1.1 激光雷达原理介绍
激光雷达的原理也很简单,就像蝙蝠的定位方法一样,蝙蝠定位大家都知道吧,像下面这样子的回声定位。
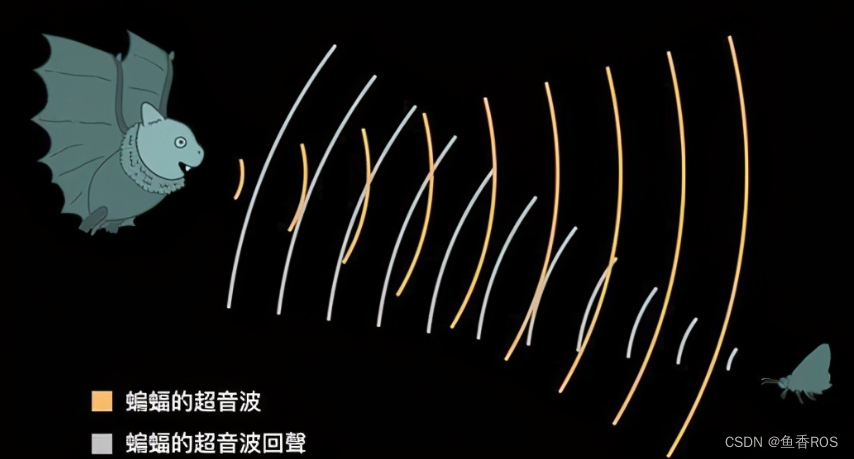
普通的单线激光雷达一般有一个发射器,一个接收器,发射器发出激光射线到前方的目标上,物品会将激光反射回来,然后激光雷达的接受器可以检测到反射的激光。
通过计算发送和反馈之间的时间间隔,乘上激光的速度,就可以计算出激光飞行的距离,该计算方法成为TOF(飞行时间法Time of flight,也称时差法)。
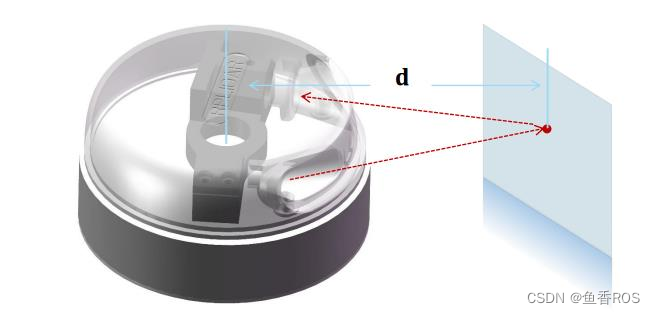
除了TOF之外还有其他方法进行测距,比如三角法,这里就不拓展了放一篇文章,大家自行阅读。
目前市面上的激光雷达,几乎都是采用三角测距,比如思岚的:

需要注意的是虽然只有一个发射器和一个接受器,激光雷达通过电机可以进行旋转,这样就可以达到对周围环境360度测距的目的。
1.2 激光雷达大赏
五位数的长这样
四位数的长这样

三位数的长这样

两位数的长这样

不要钱的长这样
仿真的,不要钱
2.Gazebo激光雷达插件
因为激光雷达是属于射线类传感器,该类传感在在Gazebo插件中都被封装成了一个动态库libgazebo_ros_ray_sensor.so。
接着我们来看看LiDAR的话题消息接口sensor_msgs/msg/LaserScan。
ros2 interface show sensor_msgs/msg/LaserScanCopy to clipboardErrorCopied
# Single scan from a planar laser range-finder
#
# If you have another ranging device with different behavior (e.g. a sonar
# array), please find or create a different message, since applications
# will make fairly laser-specific assumptions about this data
std_msgs/Header header # timestamp in the header is the acquisition time of
# the first ray in the scan.
#
# in frame frame_id, angles are measured around
# the positive Z axis (counterclockwise, if Z is up)
# with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position
# of 3d points
float32 scan_time # time between scans [seconds]
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m]
# (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your
# device does not provide intensities, please leave
# the array empty.Copy to clipboardErrorCopied
雷达的数据结构有些复杂,但通过注释和名字相信你可以看的七七八八,看不懂也没关系,一般情况下我们不会直接的对雷达的数据做操作。小鱼这里也就先skip。
3.为FishBot添加雷达插件
有了前面的经验,我们需要在URDF添加以下内容即可
<gazebo reference="laser_link">
<sensor name="laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>3.5</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_link</frame_name>
</plugin>
</sensor>
</gazebo>Copy to clipboardErrorCopied
可以看到:
- 雷达也可以设置更新频率
update_rate,这里设置为5 - 雷达可以设置分辨率,设置为1,采样数量360个,最终生成的点云数量就是360
- 雷达也有噪声,模型为
gaussian - 雷达有扫描范围
range,这里配置成0.12-3.5,0.015分辨率 - 雷达的
pose就是雷达的joint中位置的设置值
4.编译测试
编译
colcon buildCopy to clipboardErrorCopied
运行
ros2 launch fishbot_description gazebo.launch.pyCopy to clipboardErrorCopied
CLI看话题
ros2 topic list
ros2 topic info /scanCopy to clipboardErrorCopied
ros2 topic echo /scanCopy to clipboardErrorCopied
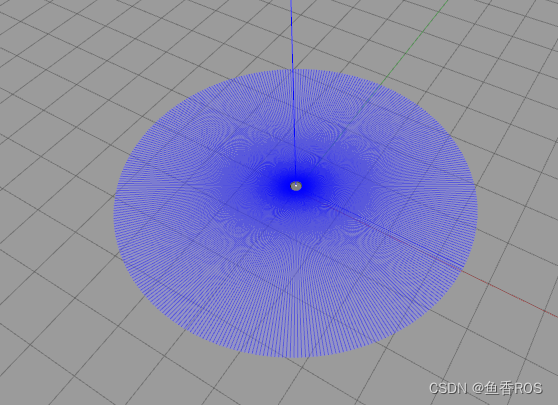
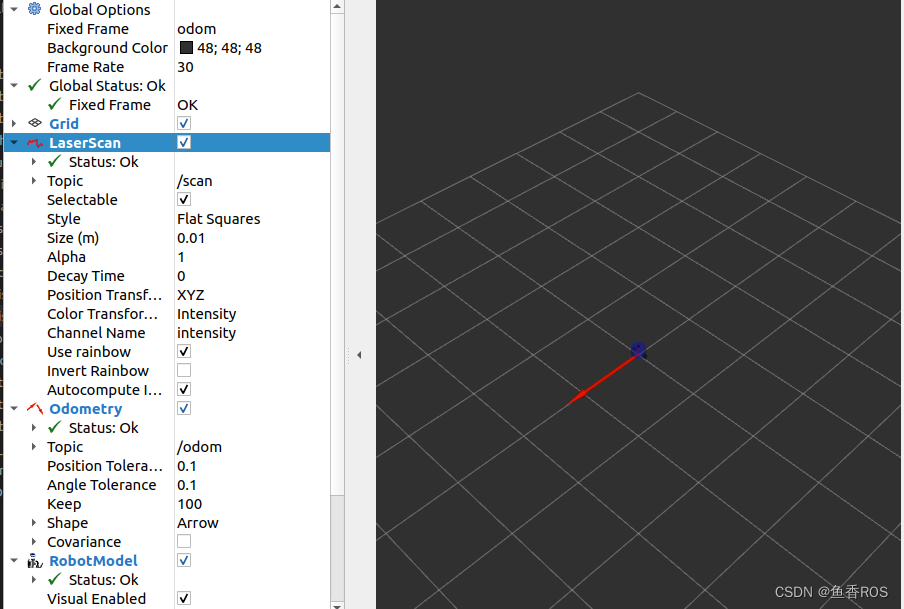
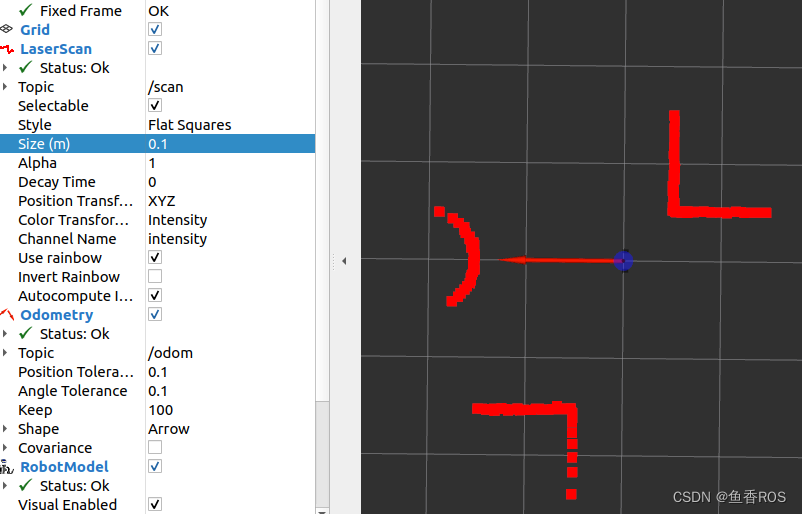
接着我们尝试使用rviz2进行可视化激光雷达数据
添加和修改RVIZ2的如下:(通过LaserScan插件可以看到激光数据)
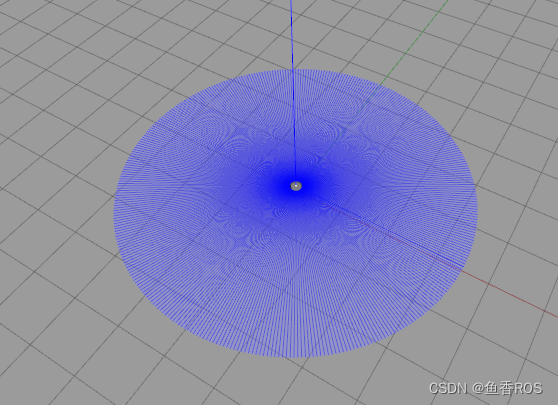
相信你改完之后依然是看不到任何激光雷达的数据的,反看topic的echo出来的数据,不是0就是inf(无限大),再看看gazebo你会发现,激光雷达并没有达到任何一个物体上。
所以我们可以手动的给激光雷达周围添加一下东西,点击Gazebo工具栏的正方体,圆球或者圆柱,随意放置几个到我们激光雷达的最大扫描半径内。

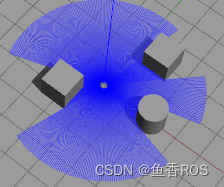
接着我们再看一下RVIZ2,这里小鱼把size改大了10倍0.01->0.1。
5.总结
到这里我们就把fishbot的各个传感器都仿真出来了,第九章的内容也暂且告一段落,迎接我们的是第十章,也就是fishbot的导航仿真,nav2了。
如果你想先本教程一步学习Nav2,可以到nav2中文网哦~
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
- QQ交流群:139707339
- 版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划

