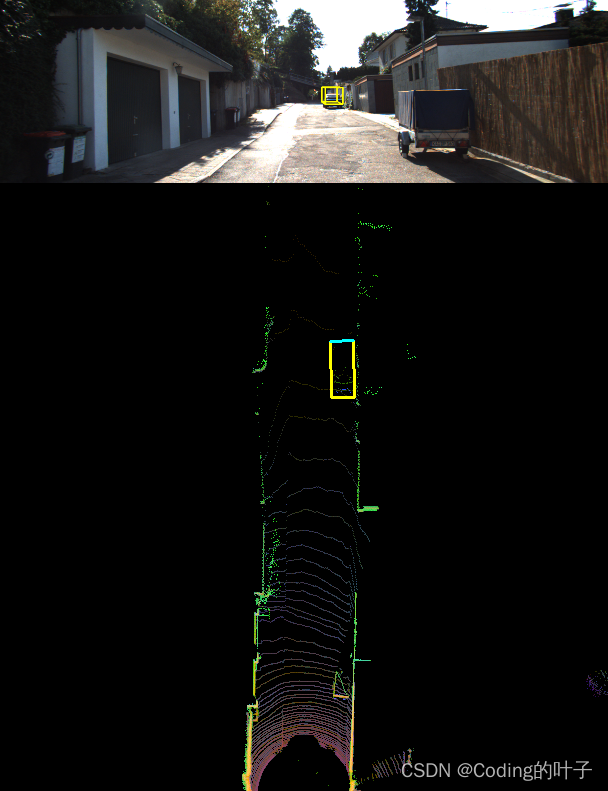
????????ЧАУцЗжБ№НщЩмСЫЛљгкЕудЦЕФШ§ЮЌЩюЖШбЇЯАЫуЗЈPointNetЁЂPointNet++,КЭЛљгкЬхЫиЕФШ§ЮЌЩюЖШбЇЯАЫуЗЈVoxelNetЁЃБОНкНЋПЊЪМНщЩмЛљгкЭЖгАЕФШ§ЮЌЩюЖШбЇЯАЫуЗЈComplex-Yolov4ЁЃШ§ЮЌЭЖгАЫуЗЈжївЊЫМЯыЪЧгУМЄЙтРзДяЕудЦЕФФёюЋЭМ(BEV)КЭЧАЪгЭМ(FV)зїЮЊФЃаЭЪфШы,НЋШ§ЮЌЕудЦзЊЛЛЮЊЖўЮЌЭМЦЌ,дчЦкЙЄзїПЊЪМгк2017ФъЕФMV3DЁЃ
????????МЄЙтРзДяЕудЦЕФФёюЋЭМКЭЧАЪгЭМЕФЯъЯИНщЩмЧыВЮПМ:ЕудЦФёюЋЭМBEVдРэгыПЩЪгЛЏ_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭКЭЯъЯИРэНтРзДяЕудЦЧАЪгЭМ(FV, Front View)_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭЁЃ
????????ЫуЗЈВЮПМРДдДгкGithubЩЯЕФComplex Yolov4,ЕижЗЮЊ:https://github.com/maudzung/Complex-YOLOv4-PytorchЁЃ
1 Ъ§ОнФПТМНсЙЙ
????????Complex-Yolov4ЕФЪ§ОнРДдДгкKITTIЪ§ОнМЏ,ЦфФПТМНсЙЙШчЯТЭМЫљЪОЁЃЮЊСЫПьЫйНјааЫуЗЈЕїЪдЁЂбЕСЗЁЂЦРЙРКЭбщжЄ,вдМАПьЫйЯТди,ЮвжЦзїСЫвЛИіmini kittiЪ§ОнМЏ,Ъ§ОнМЏЕФЮФМўФПТМНсЙЙгыЭъећKITTIЪ§ОнМЏБЃГжвЛжТЁЃЦфжа,аЁаЭЕФKITTIЪ§ОнМЏ,МД mini kittiБЃДцСЫ20ИібЕСЗбљБОКЭ5ИіВтЪдбљБОЁЃЯТдиЕижЗЮЊ:minikittiЪ§ОнМЏ-ЩюЖШбЇЯАЮФЕЕРрзЪдД-CSDNЯТди,ЯъЯИНщЩмЧыВЮПМ:KITTIЪ§ОнМЏМђНщ ЁЊ Mini KITTI_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭhttps://blog.csdn.net/suiyingy/article/details/124820161ЁЃЯТдиЕФЪ§ОнАќКЌ4ИіВПЗж,МДМЄЙтРзДяЪ§ОнvelodyneЁЂЭМЯёЪ§Онimage_2ЁЂаЃзМЪ§ОнcalibКЭБъзЂЪ§Онlabel_2ЁЃ
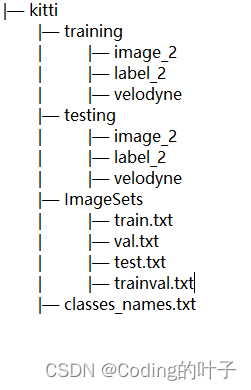
????????Г§СЫMini KittiЪ§ОнжЎЭтЛЙашImageSetsКЭclasses_names.txtЁЃImageSetsЮФМўМажаЖЈвхСЫбЕСЗЁЂбщжЄКЭВтЪдбљБОЕФШЋВПУћГЦЁЃImageSetsПЩвдВЮПМComplex-Yolov4здДјЕФФкШнНјааЖЈвх,ашвЊгыMini KittiБЃГжвЛжТ,вВПЩвджБНгЯТди,ЯТдиЕижЗЮЊ:train_val_testforminikitti-ЩюЖШбЇЯАЮФЕЕРрзЪдД-CSDNЯТдиЁЃЯТдиКѓНЋЮФМўМажиУћЮЊImageSetsМДПЩЁЃ
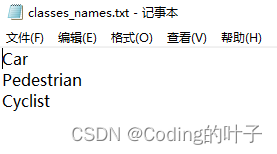
????????classes_names.txtДцДЂСЫашвЊМьВтЕФФПБъРрБ№,ЦфФЌШЯФкШнШчЯТЭМЫљЪО:
2 Ъ§ОнДІРэ
????????(1)ЖСШЁМЄЙтРзДяЪ§ОнNx4ЁЂБъЧЉЪ§ОнКЭаЃзМЪ§ОнЁЃ
????????(2)ДгБъЧЉжаЩИбЁГіЙизЂЕФБъЧЉ,ШчCar,УПИіБъЧЉlabelГЄЖШЮЊ8,ЗжБ№ЪЧxЁЂyЁЂzЁЂhЁЂwЁЂlЁЂry,ЦфжаxЁЂyЁЂzКЭryЪЧЯрЛњзјБъЯЕжаЕФШЁжЕЁЃРћгУаЃзМЪ§ОнCalib,ЯрЛњзјБъЯЕЯТЕФxЁЂyЁЂzКЭryзЊЛЛЮЊРзДязјБъЯЕЯТЕФxЁЂyЁЂzКЭrz,ОпЬхдРэКЭЙ§ГЬПЩвдВЮПМKITTIЪ§ОнМЏМђНщ(ЫФ) ЁЊ БъЖЈаЃзМЪ§Онcalib_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭКЭШ§ЮЌЕудЦФПБъМьВт ЁЊ VoxelNetЯъНтжЎЪ§ОнДІРэ (Жў)_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭСНЦЊВЉПЭЁЃзЂвтЕН,VoxelNetДњТыКЭComplex-YoloДњТыжаЙигкзјБъДгЯрЛњзјБъЯЕБфЛЛЕНРзДязјБъЯЕЕФДњТыЪЧВЛЭЌЕФ,VoxelNetВЮПМДњТыжаЩйСЫR0_rectЕФФцОиеѓЁЃНЋВЙГфКѓЕФДњТыШчЯТЫљЪО:
def camera_to_lidar(x, y, z, V2C=None, R0=None, P2=None):
????p = np.array([x, y, z, 1])
????if V2C is None or R0 is None:
????????p = np.matmul(cnf.R0_inv, p)
????????p = np.matmul(cnf.Tr_velo_to_cam_inv, p)
????else:
????????R0_i = np.zeros((4, 4))
????????R0_i[:3, :3] = R0
????????R0_i[3, 3] = 1
????????p = np.matmul(np.linalg.inv(R0_i), p)
????????p = np.matmul(inverse_rigid_trans(V2C), p)
????p = p[0:3]
return tuple(p)????????(3)НЋБъзЂВЮЪ§ЭЖгАЕНЭМЯёжа,ЛёЕУЭЖгАКѓЕФxЁЂyЁЂwЁЂl,ЯъЯИНщЩмЭЌVoxelnetВПЗж:Ш§ЮЌЕудЦФПБъМьВт ЁЊ VoxelNetЯъНтжЎЪ§ОнДІРэ (Жў)_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭЁЃ
????????(4)НЋxЁЂyЁЂwЁЂlЁЂrzзЊЛЛГЩyoloИёЪН,ЦфжаrzгУХЗРЙЋЪНзЊЛЛЮЊащВП(im)КЭЪЕВП(re)ЁЃетбљзюжеецЪЕБъЧЉtargetгЩ8ИіЮЌЖШзщГЩ,МДbatch_idЁЂclass_idЁЂxЁЂyЁЂwЁЂlЁЂimЁЂreЁЃ
????????(5)ЩОГ§жИЖЈЗЖЮЇжЎЭтЕФМЄЙтРзДяЪ§Он:kitti_bev_utils.removePoints(lidarData, cnf.boundary)ЁЃ
????????(6)ЛёШЁФёюЋЭМ(BEV)rgb_map:гЩЧПЖШЭМintensityMap(608x608)ЁЂИпЖШЭМheightMap(608x608)КЭУмЖШЭМdensityMap(608x608)ЙВЭЌзщГЩ3x608x608ЮЌЖШЕФФёюЋЭМ,РрЫЦгк3ЭЈЕРЕФRGBЭМЦЌЁЃетвВЪЧИУЫуЗЈКЫаФЫМЯыЕФЬхЯжЁЃФёюЋЭМЯъЯИНщЩмЧыВЮПМ:ЕудЦФёюЋЭМBEVдРэгыПЩЪгЛЏ_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭЁЃБОГЬађжаxoyЦНУцФкЕФЭјИёГпДчгЩDiscretizationВЮЪ§ОіЖЈ,ШЁжЕЮЊ(boundary["maxX"] - boundary["minX"]) / BEV_HEIGHT
????????(7)ЖСШЁЕНЕФЪ§ОнашвЊОЙ§ЫцЛњЫЎЦНЗзЊЛђCutoutдіЧПЁЃ
????????ОЙ§ЩЯЪі7ИіВНжш,ПЩвдЕУЕНФЃаЭЪфГіЕФЪ§ОнАќКЌimg_fileЁЂrgb_mapЁЂtargetsЁЃМйЩшBatch SizeДѓаЁЮЊBЁЃimg_fileДцДЂСЫimage_2жаЖдгІЭМЦЌЕФТЗОЖСаБэ,ГЄЖШЮЊBЁЃRgb_mapЮЊВНжш(6)жаЕФФёюЋЭМ,ЮЌЖШЮЊBx3X608x608ЁЃtargetsЮЊецЪЕБъЧЉ,ИљОн(4)жаЖЈвхПЩвджЊЕРЦфЮЌЖШЮЊMx8,MЮЊФПБъзмЪ§СПЁЃ
3 Ъ§ОнПЩЪгЛЏ
????????дЫааsrc/data_processФПТМЯТЕФkitti_dataloader.pyЮФМў,ПЩвдЕУЕНВПЗжПЩЪгЛЏНсЙћ,ШчЯТЭМЫљЪОЁЃ
4?pythonШ§ЮЌЕудЦДгЛљДЁЕНЩюЖШбЇЯА_CodingЕФвЖзгЕФВЉПЭ-CSDNВЉПЭ_pythonШ§ЮЌЕудЦжиНЈ
ИќЖрШ§ЮЌЁЂЖўЮЌИажЊЫуЗЈКЭН№ШкСПЛЏЗжЮіЫуЗЈЧыЙизЂЁАРжРжИажЊбЇЬУЁБЮЂаХЙЋжкКХ,ВЂНЋГжајНјааИќаТЁЃ
