面向优化科学研究领域的软件包

项目介绍
??optimtool采用了北京大学出版的《最优化:建模、算法与理论》这本书中的部分理论方法框架,运用了 Numpy 包高效处理数组间运算等的特性,巧妙地应用了 Sympy 内部支持的 .jacobian 等方法,并结合 Python 内置函数 dict 与 zip 实现了 Sympy 矩阵到 Numpy 矩阵的转换,最终设计了一个用于最优化科学研究领域的Python工具包。 研究人员可以通过简单的 pip 指令进行下载与使用。 项目内无约束优化与约束优化板块的算法仍然需要不断更新、维护与扩充,并且应用于混合约束优化板块的算法将在日后上线。 我们非常欢迎广大热爱数学、编程的各界人士加入开发与更新最优化计算方法的队伍中,提出新的框架或算法,成为里程碑中的一员。
项目结构
|- optimtool
|-- constrain
|-- __init__.py
|-- equal.py
|-- mixequal.py
|-- unequal.py
|-- example
|-- __init__.py
|-- Lasso.py
|-- WanYuan.py
|-- functions
|-- __init__.py
|-- linear_search.py
|-- tools.py
|-- hybrid
|-- __init__.py
|-- approximate_point_gradient.py
|-- unconstrain
|-- __init__.py
|-- gradient_descent.py
|-- newton.py
|-- newton_quasi.py
|-- nonlinear_least_square.py
|-- trust_region.py
|-- __init__.py
??因为在求解不同的目标函数的全局或局部收敛点时,不同的求取收敛点的方法会有不同的收敛效率以及不同的适用范围,而且在研究过程中不同领域的研究方法被不断地提出、修改、完善、扩充,所以这些方法成了现在人们口中的最优化方法。 此项目中的所有内部支持的算法,都是在范数、导数、凸集、凸函数、共轭函数、次梯度和最优化理论等基础方法论的基础上进行设计与完善的。
??optimtool内置了诸如Barzilar Borwein非单调梯度下降法、修正牛顿法、有限内存BFGS方法、截断共轭梯度法-信赖域方法、高斯-牛顿法等无约束优化领域收敛效率与性质较好的算法,以及用于解决约束优化问题的二次罚函数法、增广拉格朗日法等算法。
Github源码:linjing-lab/optimtool
开始使用
无约束优化算法(unconstrain)
import optimtool.unconstrain as ou
ou.[方法名].[函数名]([目标函数], [参数表], [初始迭代点])
梯度下降法(gradient_descent)
ou.gradient_descent.[函数名]([目标函数], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| solve(funcs, args, x_0, draw=True, output_f=False, epsilon=1e-10, k=0) | 通过解方程的方式来求解精确步长 | | steepest(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, epsilon=1e-10, k=0) | 使用线搜索方法求解非精确步长(默认使用wolfe线搜索) | | barzilar_borwein(funcs, args, x_0, draw=True, output_f=False, method=“grippo”, M=20, c1=0.6, beta=0.6, alpha=1, epsilon=1e-10, k=0) | 使用Grippo与Zhang hanger提出的非单调线搜索方法更新步长 |
牛顿法(newton)
ou.newton.[函数名]([目标函数], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| classic(funcs, args, x_0, draw=True, output_f=False, epsilon=1e-10, k=0) | 通过直接对目标函数二阶导矩阵(海瑟矩阵)进行求逆来获取下一步的步长 | | modified(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, m=20, epsilon=1e-10, k=0) | 修正当前海瑟矩阵保证其正定性(目前只接入了一种修正方法) | | CG(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, epsilon=1e-6, k=0) | 采用牛顿-共轭梯度法求解梯度(非精确牛顿法的一种) |
拟牛顿法(newton_quasi)
ou.newton_quasi.[函数名]([目标函数], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| bfgs(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, m=20, epsilon=1e-10, k=0) | BFGS方法更新海瑟矩阵 | | dfp(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, m=20, epsilon=1e-4, k=0) | DFP方法更新海瑟矩阵 | | L_BFGS(funcs, args, x_0, draw=True, output_f=False, method=“wolfe”, m=6, epsilon=1e-10, k=0) | 双循环方法更新BFGS海瑟矩阵 |
非线性最小二乘法(nonlinear_least_square)
ou.nonlinear_least_square.[函数名]([目标函数], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| gauss_newton(funcr, args, x_0, draw=True, output_f=False, method=“wolfe”, epsilon=1e-10, k=0) | 高斯-牛顿提出的方法框架,包括OR分解等操作 | | levenberg_marquardt(funcr, args, x_0, draw=True, output_f=False, m=100, lamk=1, eta=0.2, p1=0.4, p2=0.9, gamma1=0.7, gamma2=1.3, epsilon=1e-10, k=0) | Levenberg Marquardt提出的方法框架 |
信赖域方法(trust_region)
ou.trust_region.[函数名]([目标函数], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| steihaug_CG(funcs, args, x_0, draw=True, output_f=False, m=100, r0=1, rmax=2, eta=0.2, p1=0.4, p2=0.6, gamma1=0.5, gamma2=1.5, epsilon=1e-6, k=0) | 截断共轭梯度法在此方法中被用于搜索步长 |
约束优化算法(constrain)
import optimtool.constrain as oc
oc.[方法名].[函数名]([目标函数], [参数表], [等式约束表], [不等式约数表], [初始迭代点])
等式约束(equal)
oc.equal.[函数名]([目标函数], [参数表], [等式约束表], [初始迭代点])
| 方法头 | 解释 |
|---|
| penalty_quadratic(funcs, args, cons, x_0, draw=True, output_f=False, method=“gradient_descent”, sigma=10, p=2, epsilon=1e-4, k=0) | 增加二次罚项 | | lagrange_augmented(funcs, args, cons, x_0, draw=True, output_f=False, method=“gradient_descent”, lamk=6, sigma=10, p=2, etak=1e-4, epsilon=1e-6, k=0) | 增广拉格朗日乘子法 |
不等式约束(unequal)
oc.unequal.[函数名]([目标函数], [参数表], [不等式约束表], [初始迭代点])
| 方法头 | 解释 |
|---|
| penalty_quadratic(funcs, args, cons, x_0, draw=True, output_f=False, method=“gradient_descent”, sigma=10, p=0.4, epsilon=1e-10, k=0) | 增加二次罚项 | | penalty_interior_fraction(funcs, args, cons, x_0, draw=True, output_f=False, method=“gradient_descent”, sigma=12, p=0.6, epsilon=1e-6, k=0) | 增加分式函数罚项 | | penalty_interior_log(funcs, args, cons, x_0, draw=True, output_f=False, sigma=12, p=0.6, epsilon=1e-10, k=0) | 增加近似点梯度法解决了迭代点溢出的问题 | | lagrange_augmented(funcs, args, cons, x_0, draw=True, output_f=False, method=“gradient_descent”, muk=10, sigma=8, alpha=0.2, beta=0.7, p=2, eta=1e-1, epsilon=1e-4, k=0) | 增广拉格朗日乘子法 |
混合等式约束(mixequal)
oc.mixequal.[函数名]([目标函数], [参数表], [等式约束表], [不等式约束表], [初始迭代点])
| 方法头 | 解释 |
|---|
| penalty_quadratic(funcs, args, cons_equal, cons_unequal, x_0, draw=True, output_f=False, method=“gradient_descent”, sigma=10, p=0.6, epsilon=1e-10, k=0) | 增加二次罚项 | | penalty_L1(funcs, args, cons_equal, cons_unequal, x_0, draw=True, output_f=False, method=“gradient_descent”, sigma=1, p=0.6, epsilon=1e-10, k=0) | L1精确罚函数法 | | lagrange_augmented(funcs, args, cons_equal, cons_unequal, x_0, draw=True, output_f=False, method=“gradient_descent”, lamk=6, muk=10, sigma=8, alpha=0.5, beta=0.7, p=2, eta=1e-3, epsilon=1e-4, k=0) | 增广拉格朗日乘子法 |
混合优化算法(hybrid)
import optimtool.hybrid as oh
近似点梯度下降法(approximate_point_gradient)
oh.approximate_point_gradient.[邻近算子名]([可微函数], [系数], [函数2], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| L1(funcs, mu, gfun, args, x_0, draw=True, output_f=False, t=0.01, epsilon=1e-6, k=0) | L1范数邻近算子 | | neg_log(funcs, mu, gfun, args, x_0, draw=True, output_f=False, t=0.01, epsilon=1e-6, k=0) | 负对数邻近算子 |
方法的应用(example)
import optimtool.example as oe
Lasso问题(Lasso)
oe.Lasso.[函数名]([矩阵A], [矩阵b], [因子mu], [参数表], [初始迭代点])
| 方法头 | 解释 |
|---|
| gradient_descent(A, b, mu, args, x_0, draw=True, output_f=False, delta=10, alp=1e-3, epsilon=1e-2, k=0) | 光滑化Lasso函数法 | | subgradient(A, b, mu, args, x_0, draw=True, output_f=False, alphak=2e-2, epsilon=1e-3, k=0) | 次梯度法Lasso避免一阶不可导 | | penalty(A, b, mu, args, x_0, draw=True, output_f=False, gamma=0.1, epsilon=1e-6, k=0) | 罚函数法 | | approximate_point_gradient(A, b, mu, args, x_0, draw=True, output_f=False, epsilon=1e-6, k=0) | 邻近算子更新 |
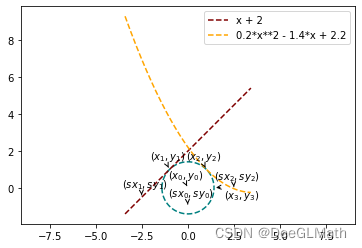
曲线相切问题(WanYuan)
oe.WanYuan.[函数名]([直线的斜率], [直线的截距], [二次项系数], [一次项系数], [常数项], [圆心横坐标], [圆心纵坐标], [初始迭代点])
问题描述:
给定直线的斜率和截距,给定一个抛物线函数的二次项系数,一次项系数与常数项。 要求解一个给定圆心的圆,该圆同时与抛物线、直线相切,若存在可行方案,请给出切点的坐标。
| 方法头 | 解释 |
|---|
| gauss_newton(m, n, a, b, c, x3, y3, x_0, draw=False, eps=1e-10) | 使用高斯-牛顿方法求解构造的7个残差函数 |
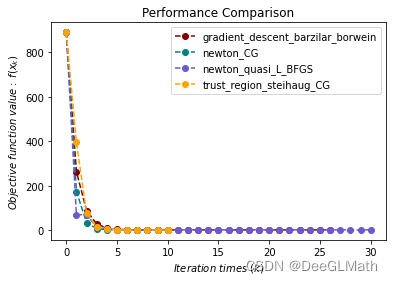
测试案例
无约束优化问题测试
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
f, x1, x2, x3, x4 = sp.symbols("f x1 x2 x3 x4")
f = (x1 - 1)**2 + (x2 - 1)**2 + (x3 - 1)**2 + (x1**2 + x2**2 + x3**2 + x4**2 - 0.25)**2
funcs = f
args = [x1, x2, x3, x4]
x_0 = (1, 2, 3, 4)
f_list = []
title = ["gradient_descent_barzilar_borwein", "newton_CG", "newton_quasi_L_BFGS", "trust_region_steihaug_CG"]
colorlist = ["maroon", "teal", "slateblue", "orange"]
_, _, f = oo.unconstrain.gradient_descent.barzilar_borwein(funcs, args, x_0, False, True)
f_list.append(f)
_, _, f = oo.unconstrain.newton.CG(funcs, args, x_0, False, True)
f_list.append(f)
_, _, f = oo.unconstrain.newton_quasi.L_BFGS(funcs, args, x_0, False, True)
f_list.append(f)
_, _, f = oo.unconstrain.trust_region.steihaug_CG(funcs, args, x_0, False, True)
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
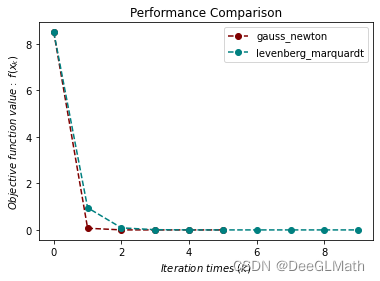
非线性最小二乘问题测试
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
r1, r2, x1, x2 = sp.symbols("r1 r2 x1 x2")
r1 = x1**3 - 2*x2**2 - 1
r2 = 2*x1 + x2 - 2
funcr = [r1, r2]
args = [x1, x2]
x_0 = (2, 2)
f_list = []
title = ["gauss_newton", "levenberg_marquardt"]
colorlist = ["maroon", "teal"]
_, _, f = oo.unconstrain.nonlinear_least_square.gauss_newton(funcr, args, x_0, False, True)
f_list.append(f)
_, _, f = oo.unconstrain.nonlinear_least_square.levenberg_marquardt(funcr, args, x_0, False, True)
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
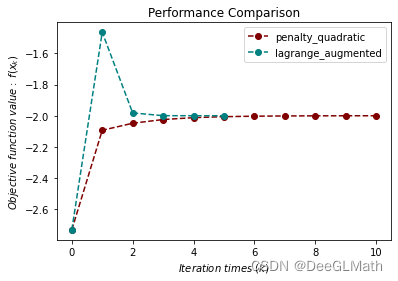
等式约束优化问题测试
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
f, x1, x2 = sp.symbols("f x1 x2")
f = x1 + np.sqrt(3) * x2
c1 = x1**2 + x2**2 - 1
funcs = f
cons = [c1]
args = [x1, x2]
x_0 = (-1, -1)
f_list = []
title = ["penalty_quadratic", "lagrange_augmented"]
colorlist = ["maroon", "teal"]
_, _, f = oo.constrain.equal.penalty_quadratic(funcs, args, cons, x_0, False, True)
f_list.append(f)
_, _, f = oo.constrain.equal.lagrange_augmented(funcs, args, cons, x_0, False, True)
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
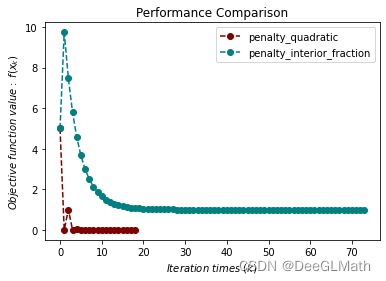
不等式约束优化问题测试
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
f, x1, x2 = sp.symbols("f x1 x2")
f = x1**2 + (x2 - 2)**2
c1 = 1 - x1
c2 = 2 - x2
funcs = f
cons = [c1, c2]
args = [x1, x2]
x_0 = (2, 3)
f_list = []
title = ["penalty_quadratic", "penalty_interior_fraction"]
colorlist = ["maroon", "teal"]
_, _, f = oo.constrain.unequal.penalty_quadratic(funcs, args, cons, x_0, False, True, method="newton", sigma=10, epsilon=1e-6)
f_list.append(f)
_, _, f = oo.constrain.unequal.penalty_interior_fraction(funcs, args, cons, x_0, False, True, method="newton")
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
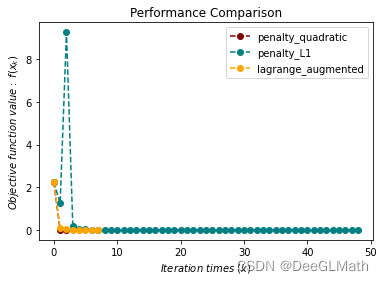
混合等式约束优化问题测试
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
f, x1, x2 = sp.symbols("f x1 x2")
f = (x1 - 2)**2 + (x2 - 1)**2
c1 = x1 - 2*x2
c2 = 0.25*x1**2 - x2**2 - 1
funcs = f
cons_equal = c1
cons_unequal = c2
args = [x1, x2]
x_0 = (0.5, 1)
f_list = []
title = ["penalty_quadratic", "penalty_L1", "lagrange_augmented"]
colorlist = ["maroon", "teal", "orange"]
_, _, f = oo.constrain.mixequal.penalty_quadratic(funcs, args, cons_equal, cons_unequal, x_0, False, True)
f_list.append(f)
_, _, f = oo.constrain.mixequal.penalty_L1(funcs, args, cons_equal, cons_unequal, x_0, False, True)
f_list.append(f)
_, _, f = oo.constrain.mixequal.lagrange_augmented(funcs, args, cons_equal, cons_unequal, x_0, False, True)
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
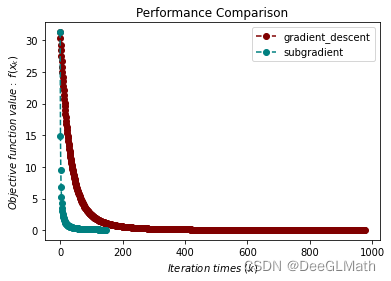
Lasso问题测试
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
import scipy.sparse as ss
f, A, b, mu = sp.symbols("f A b mu")
x = sp.symbols('x1:9')
m = 4
n = 8
u = (ss.rand(n, 1, 0.1)).toarray()
A = np.random.randn(m, n)
b = A.dot(u)
mu = 1e-2
args = x
x_0 = tuple([1 for i in range(8)])
f_list = []
title = ["gradient_descent", "subgradient"]
colorlist = ["maroon", "teal"]
_, _, f = oo.example.Lasso.gradient_descent(A, b, mu, args, x_0, False, True, epsilon=1e-4)
f_list.append(f)
_, _, f = oo.example.Lasso.subgradient(A, b, mu, args, x_0, False, True)
f_list.append(f)
handle = []
for j, z in zip(colorlist, f_list):
ln, = plt.plot([i for i in range(len(z))], z, c=j, marker='o', linestyle='dashed')
handle.append(ln)
plt.xlabel("$Iteration \ times \ (k)$")
plt.ylabel("$Objective \ function \ value: \ f(x_k)$")
plt.legend(handle, title)
plt.title("Performance Comparison")
plt.show()
曲线切点问题测试
import sympy as sp
import matplotlib.pyplot as plt
import optimtool as oo
m = 1
n = 2
a = 0.2
b = -1.4
c = 2.2
x3 = 2*(1/2)
y3 = 0
x_0 = (0, -1, -2.5, -0.5, 2.5, -0.05)
oo.example.WanYuan.gauss_newton(1, 2, 0.2, -1.4, 2.2, 2**(1/2), 0, (0, -1, -2.5, -0.5, 2.5, -0.05), draw=True)
|