PID���ƺ��迹��������ʽ�������Ƶ�,��������ƫ��,��ƫ�����������,������������ģ�ͺ���������
PID���ƺ��迹���Ƶĸ�����ͬ�ǿ�����ģ�͵IJ�ͬ��ģ�͵IJ�ͬ�����������Dz�ͬ�ġ�
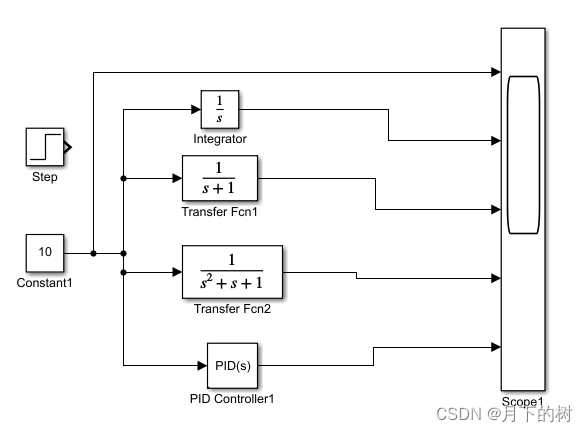
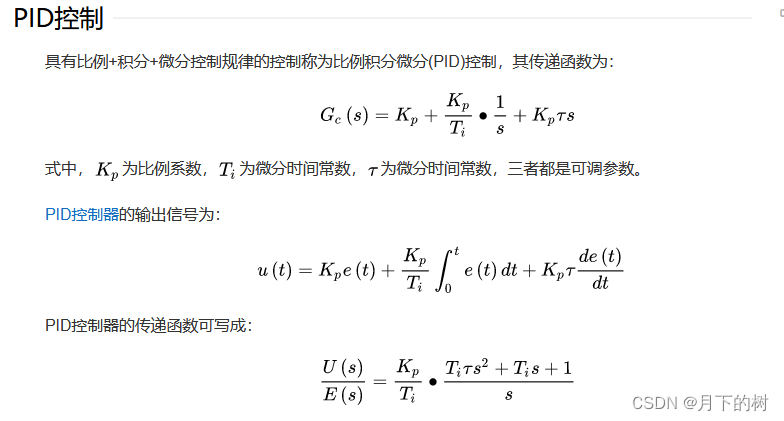
 PID��ģ������:
PID��ģ������:
PID�����ģ�Ͳ��ܸ�����ȷ����������,����˵PID�Ŀ�����û�е����ġ�
ͬʱPID�������ǽ����ž��쵽���趨Ŀ�괦,��Ϊֻ֪�����쵽���趨Ŀ�괦,��������ģ��û����˳��,����͵ľ�������PID��λ�ÿ���
�迹����,��Ȼ����˳�Խ����һ��,˵�迹����ʱ������迹�����ɵ�������ϵͳ,�迹ģ���е�ϵ�������ŵ��Ժ�����Ĵ�С���迹���Ƶ���ʽ�Ƕ���ϵͳ,�ǿ��Ժ͵��������Ӧ�Ķ���ϵͳ,Ҳ�����迹ģ�Ϳ����������������
�迹ģ��,PIDģ�ͺ��迹��������PID��������һ����,�������֡��迹��������ģ�͡�PID��������ģ��,�Ͷ���ѧû�й�ϵ,�Ͷ���ѧģ��û��˿����ϵ,����������ȫ��ͬ�ĸ���,PID��������Ҳ�п��ܽӶ���ѧģ�͡��迹ģ�͵Ķ�����ʽ�Ͷ���ѧģ�͵Ķ�����ʽ�dz�����,��������ʱ���迹ģ�ͺͶ���ѧģ�ͻ�Ϊһ̸���ڻ������迹������,��ȷ��ʱ���õ�����ѧģ��,������ȻҪ��ȷ,�迹ģ�ͺͶ���ѧģ��û�й�ϵ,����ֻ��ͬʱ���������迹���ƻ�·��,����ǡ����ʽһ��
�迹ģ�ͺͶ���ѧ��ô����,����ѧģ�ͺ��迹ģ���и���ͬ������,ͨ��������ؽ��й�����
���ڶ���ѧǰ�����迹����,���ǰ��迹���ƺͶ���ѧ��ϵ�һ�顣
û�ж���ѧ�����������迹����
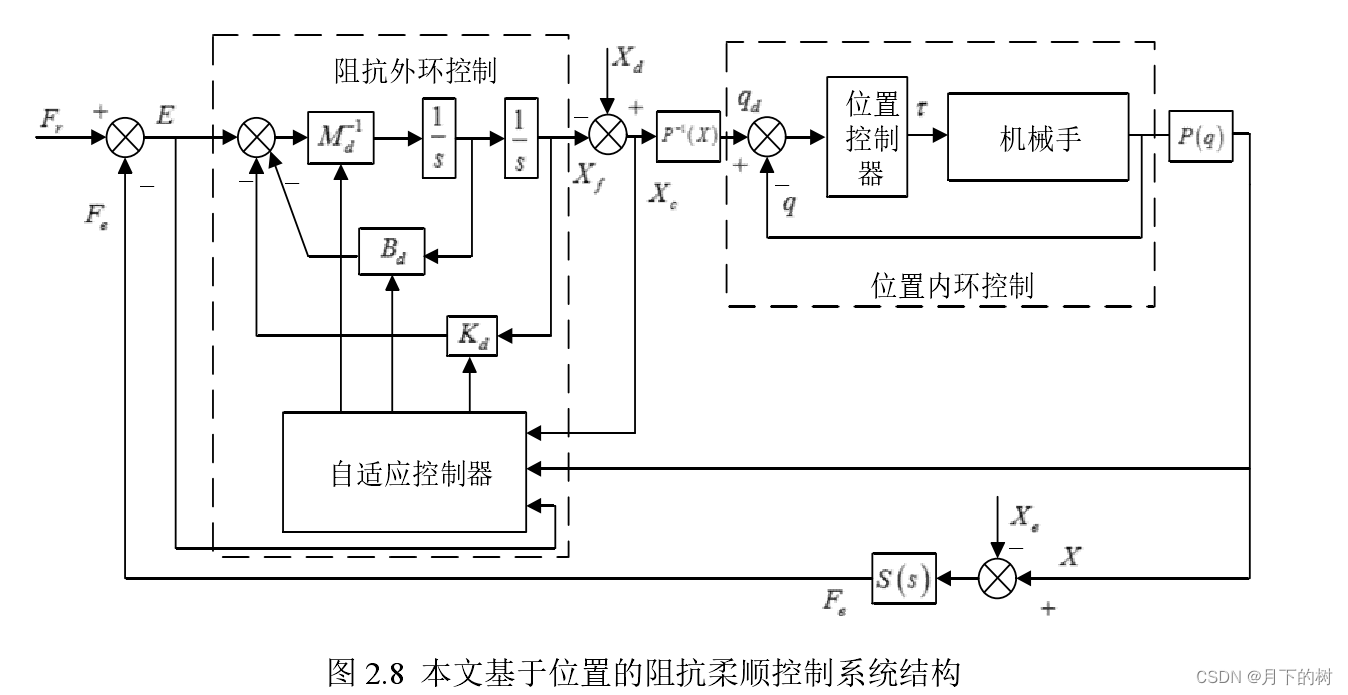
����λ�õ��迹����:
����λ��(����λ�úͽӴ�λ�õIJ�ֵ)�����迹ģ�������,����������������IJ�ֵͨ�������������ƻ����ˡ�����������������Ƕ�����ʽ��
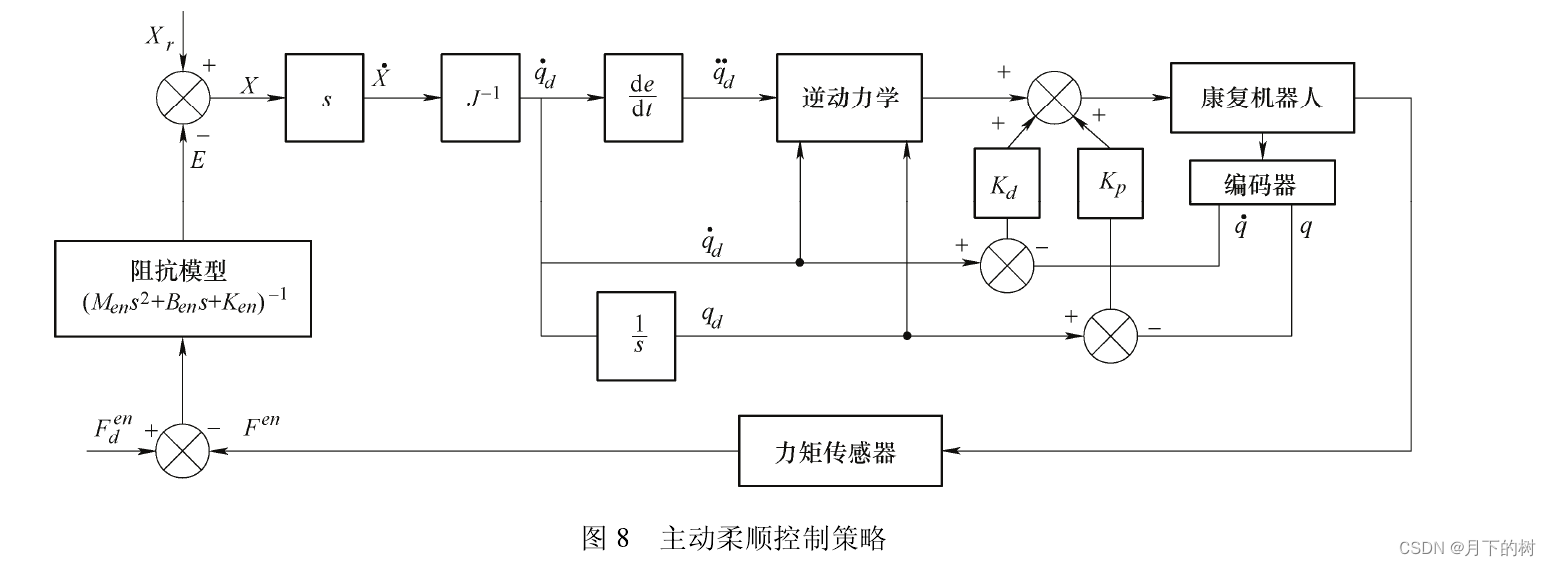
���������迹����:
������(�������ͽӴ����IJ�ֵ)�����迹ģ�����λ��,�����λ�ú�����λ�õIJ�ֵͨ��λ�ÿ��������ƻ����ˡ����λ�ÿ����������Ƕ�����ʽ��
******************************�ָ���
�迹����Ŀ��:ͨ���迹���ƶԻ�����ĩ���뻷��֮��ĽӴ������е���,ʵ�ֻ�����ĩ���뻷���Ӵ�����˳��,��֤�Ӵ���ҵ�İ�ȫ��ɡ�
1.�迹���Ƶ�����
����������ĥ�⡢װ�����Ҫ����绷���Ӵ�����ҵ����,����λ�ÿ������Ա�֤��������İ�ȫ��ɡ�������Ϊλ�ÿ����������˶��켣�������켣�������Ǻ�,�����һ����λ�����,���������ܻᵼ�»�����ĩ����Ӵ�����֮��ĽӴ�������,���صĻ�����ɻ����˻�Ӵ��������
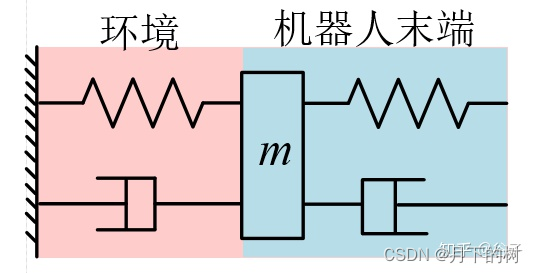
Ϊ�˼���λ��ƫ����ɵĹ���Ӵ���,ֱ�ӵ��뷨�����ǿ����ڻ�����ĩ�˼�һ������(K)��Ϊ�˱��������ٲ���һ��������(B)������������(����+������)��һ�ֹ�������,����(M)�Ƕ�������Դ�С�����ȡ�����������ĩ�˾��൱��������һ������-����-����ϵͳ��
�迹������ʵ���൱���ڻ�����ĩ�����ӵ�һ������-����-����ϵͳ,����ĩ��λ����Ӵ����Ĺ�ϵ�����ݻ�����ĩ�˵�λ�ú�������֮��Ĺ�ϵ,ͨ������λ���������ӿ��ƻ�����ĩ�˵ĽӴ�����
- �迹���ƹ�ʽ
�ϸ����ͼ����ǵ��ɵ�ͼ
�ο�:�����迹���ƵĻ����������Ƽ����о�. ������. ��������ҵ��ѧ
https://www.cnblogs.com/21207-iHome/p/12148726.html
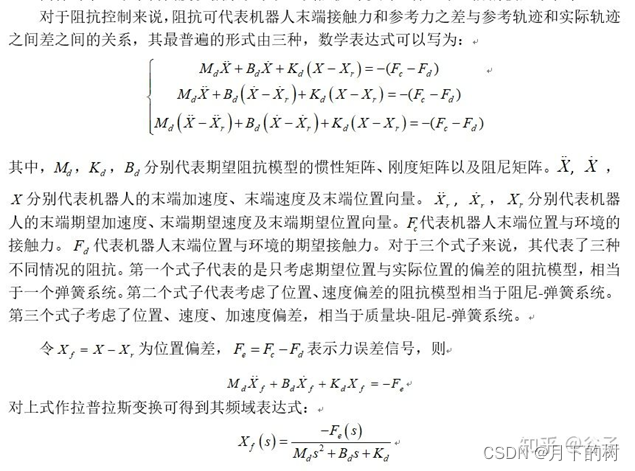
����ѧ����:
ͨ���ɽ����ݶ����ض�����ţ��-ŷ�����Ƶ����ĵ�ʽдΪ������ʽ:
��=M(��)�ȡ�+C(��,�ȨB)+G(��)
�����е�����ɶ�Ϊn,M(��)Ϊn��n�������Գƾ���,M(��)�ȡ������������M(��)�е����Խ���Ԫ�ر�ʾ�����˱�������Ч����,���������ؽ��ϵ�����������ĽǼ��ٶ�֮��Ĺ�ϵ,�ǶԽ���Ԫ�ر�ʾ����֮�����Ϲ���,����ij���˵ļ����˶�����һ�ؽڲ���������������صĶ��� ;C(��,�ȨB)Ϊn��1���������Ϳ�������;G(��)Ϊn��1��������,������˵���λ���йء�
�ڴ�λ�ÿ�����ʩ���ڻ�е��ĩ�˵�����������Ӱ��ĩ�˵��˶�,��Ϊ�������������Ϊ��е������ȫ���Եġ������Ҫʵ��������˳����,��ʹ��е�۱��ֳ�һ�������Ծ���Ҫ�������뻷��֮�������á���ʱ�ؽ��������ؿ�дΪ:
��=M(��)�ȡ�+C(��,�ȨB)+G(��)+JT(��)Ftip
�����ʽ��,FtipΪ��е��ĩ������绷��֮��Ľ�����,JΪ��е�۵��ſɱȾ���,���ڽ��ؽڿռ��ٶ�ӳ�䵽�����ռ�:v=J�ȨB,�ſɱȾ����ת��Ҳ�ɽ������ռ��е���ӳ�䵽�ؽڿռ���:��=JTF�����ڱ���,�������ſɱȾ������MATLAB�еĺ���jacobian������,J=jacobian(rae,[��1,��2])��JT(��)Ftip���������ڻ����˹ؽ��ϵ���绷������,��ʽ��ߵĦ�Ϊ�����˹ؽ���������,����������غ�Ϳ������������������ϵͳ,ʵ���������˶���
��е���뻷���������������ؿ�дΪ��ext=JT(��)Ftip=JT(��)[M(xd��?x��)+D(xd�B?x�B)+K(xd?x)],xd��x�ֱ����Ŀ��λ�ú�ʵ��λ��,xd�B��x�B�ֱ����Ŀ���ٶȺ�ʵ���ٶȡ�ע�������M D K�Ͷ���ѧ�е�M C G����һ����,����Ϊ������,���������ĸ��ʾ:
��ext=JT(��)Ftip=JT(��)[Md(xd��?x��)+Dd(xd�B?x�B)+Kd(xd?x)]
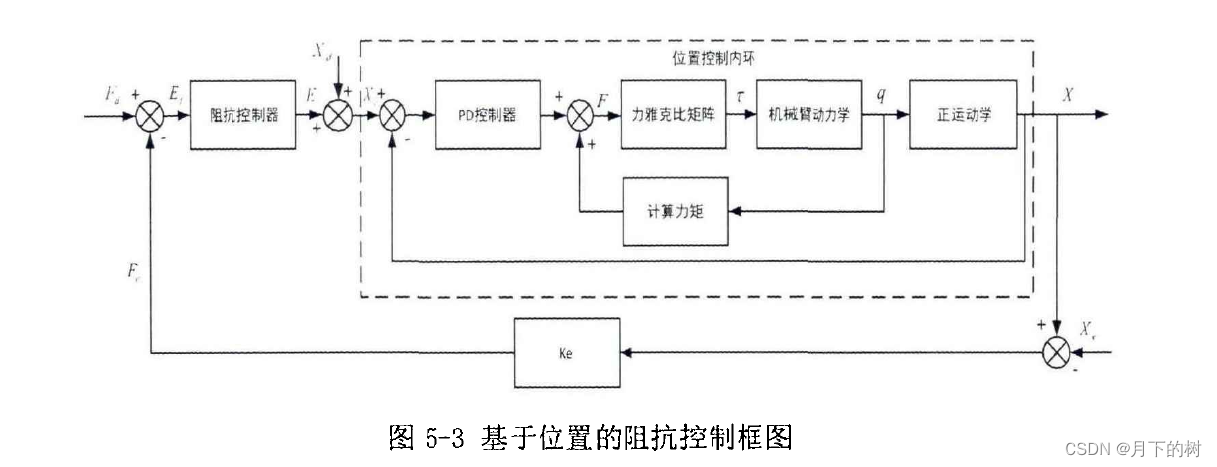
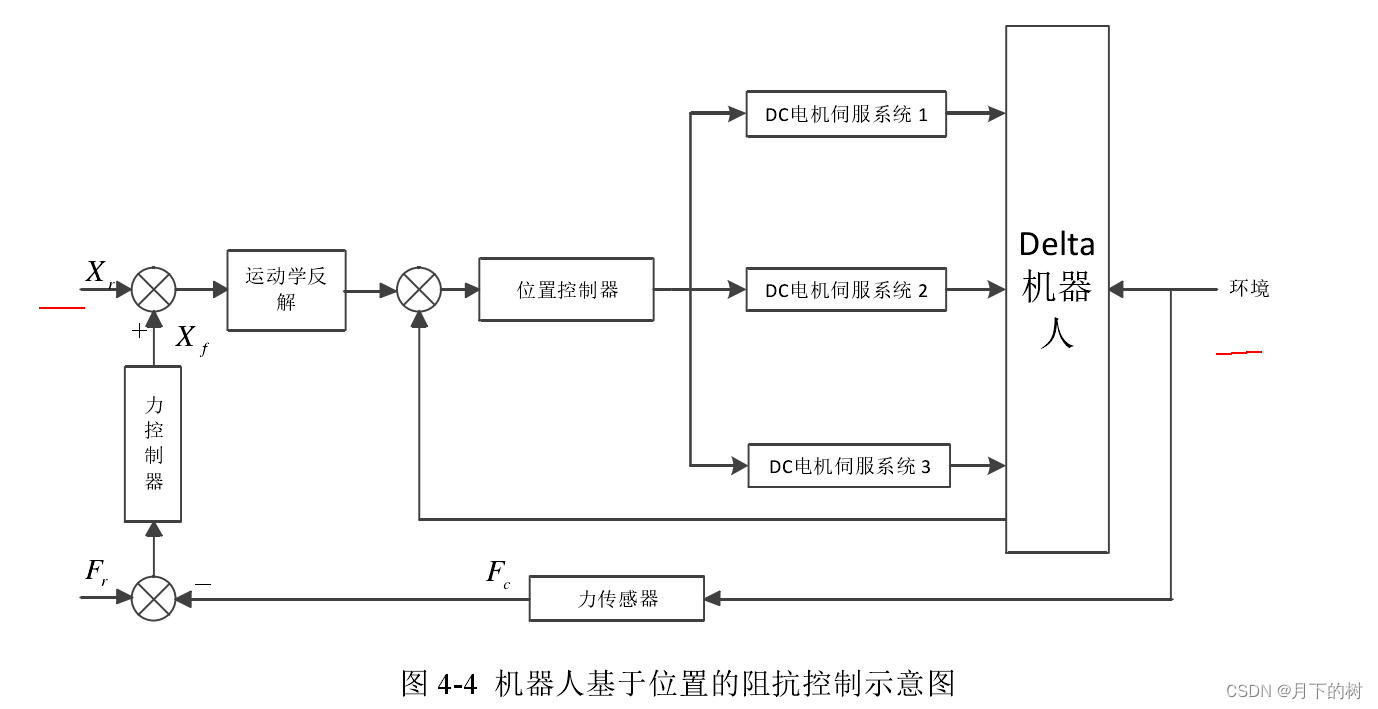
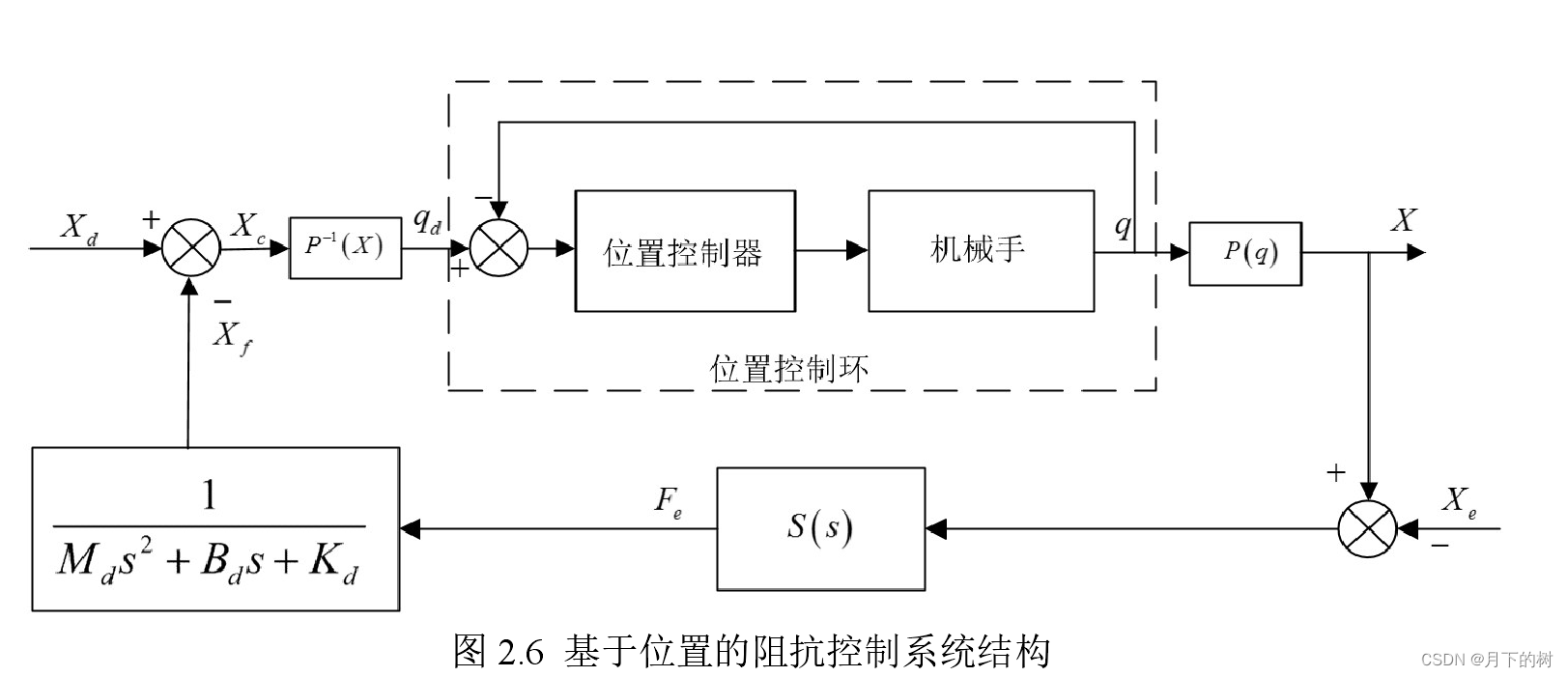
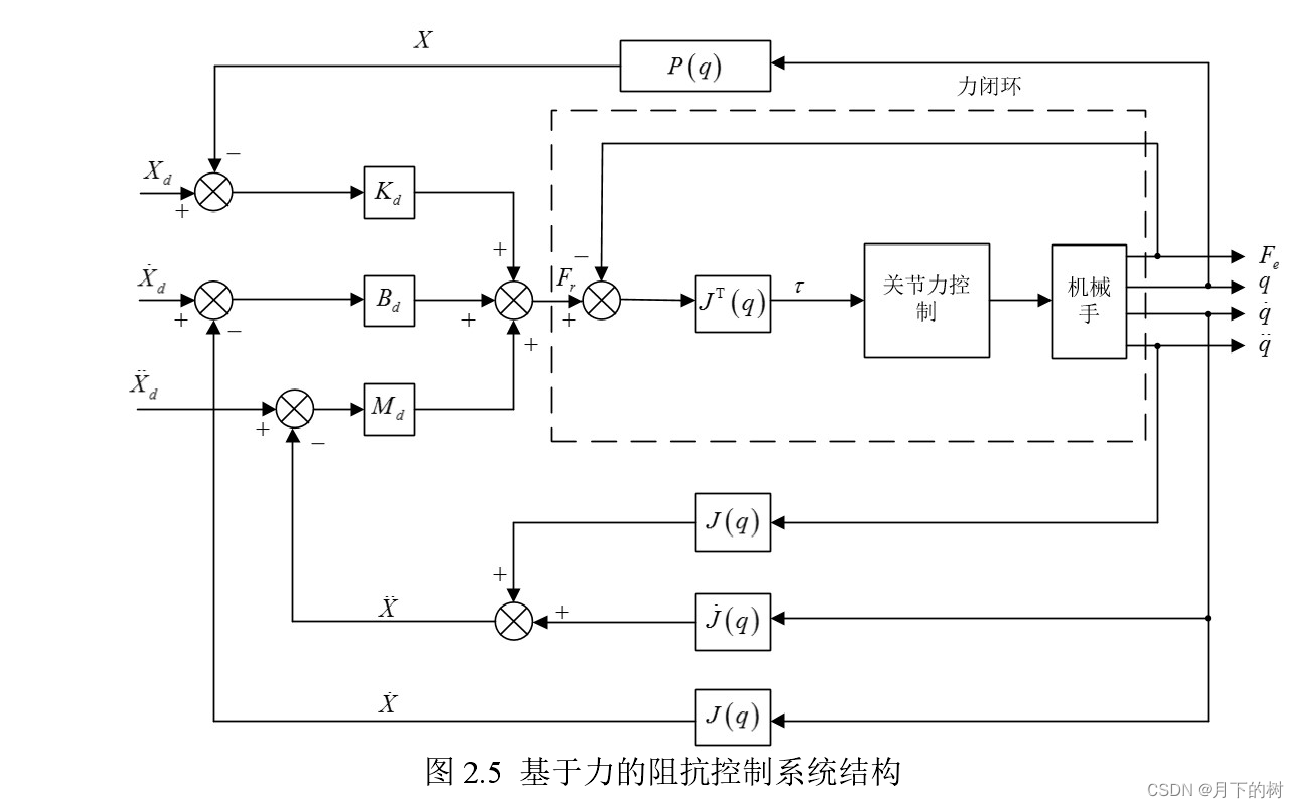
����λ�õ��迹����
ͼ1 ���ͼ����������Ӵ���Fd(���ͼ��ʵ���˶���ѧǰ��)
���ͼ�Ƚ�����,���������˶���ѧ
ͼ2 ���ͼ����Ҳ������Ӵ���Fr
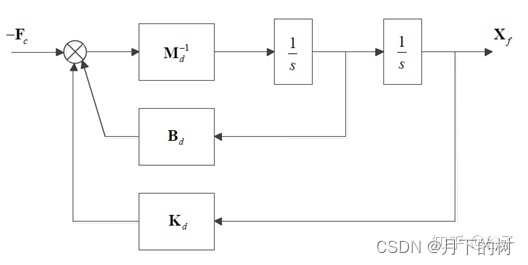
ͼ3 ���ͼ����û������Ӵ��� ��λ��ƫ��ת��������Fe
ͼ4 ����Ӧ�迹������(�ϸ���˵,ͼ1-ͼ4�е��迹���������ǵ��ɿ���)
ͼ5 ����ѧǰ��
����ѧǰ��:
����ѧ����:��=M(��)�ȡ�+C(��,�ȨB)+G(��)
�迹����(�����Ӵ���):Ftip =Md(xd��?x��)+Dd(xd�B?x�B)+Kd(xd?x)
����ѧ�����п����迹(���ڶ���ѧǰ�����迹����):
��=M(��)�ȡ�+C(��,�ȨB)+G(��)+JT(��)Ftip
���ڶ���ѧǰ�����迹����,���ǰ��迹���ƺͶ���ѧ��ϵ�һ�顣
û�ж���ѧ�����������迹����
ͼ6 ���������迹����ϵͳ
ͼ6 û���ö���ѧ,���Ǹ�ģ�����迹���ơ�
����λ�õ��迹����:
����λ��(����λ�úͽӴ�λ�õIJ�ֵ)�����迹ģ�������,����������������IJ�ֵͨ�������������ƻ����ˡ�����������������Ƕ�����ʽ��
���������迹����:
������(�������ͽӴ����IJ�ֵ)�����迹ģ�����λ��,�����λ�ú�����λ�õIJ�ֵͨ��λ�ÿ��������ƻ����ˡ����λ�ÿ����������Ƕ�����ʽ��
�迹�͵��ɿɲο�:
https://blog.csdn.net/xiaohejiaoyiya/article/details/105057619
https://zhuanlan.zhihu.com/p/165587437
������λ���ǵ���,��λ�õ������迹