Ŀǰ�Ѿ���Դ��~����Ҫ��С��������ȡȥ�о�
GitHub - Leeable/far-planner-with-yolo: A FAR Planner version with yolo to detect object
 ?
?
?
���콲���������noetic����dnnģ����ʹ��yolov4
yolov4 ros noetic
ROSϵͳ�д��㿪ʼ����YoloV4Ŀ�����㷨(3�ַ�ʽ)_���µIJ���-CSDN����_ros Ŀ����
��ƪ���¸��˺ܴ������,�����ڴ���opencv��������,���������������Dz�ȥ��noetic�ﱾ����cv_bridge��,������pkg�����һ��opencv��bridge����
1.����opencv
������֪,noetic�������3.2�汾��cv,̫����,û�а취��dnnģ��(dnn����Ҫ3.3���ϵ�opencv�Ż���)������,��ȥopencv�Ĺ�������source�������ص���OpenCV �C 4.5.4
��ѹopencvȻ��
cd opencv-4.5.4
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=RELEASE -DCMAKE_INSTALL_PREFIX=/usr/local -DWITH_TBB=ON -DBUILD_NEW_PYTHON_SUPPORT=ON -DWITH_V4L=ON -DINSTALL_C_EXAMPLES=ON -DINSTALL_PYTHON_EXAMPLES=ON -DBUILD_EXAMPLES=ON -DWITH_QT=ON -DWITH_GTK=ON -DWITH_OPENGL=ON ..
make -j12
sudo make install2.����ros���ܰ�
cd ~
mkdir -p ros_ws/src
cd ros_ws
catkin_make
cd src
catkin_create_pkg detection_pkg roscpp rospy std_msgs cv_bridge
cd ..
catkin_make
3.����vision_opencv
cd ros_ws/src
git clone https://gitcode.net/mirrors/ros-perception/vision_opencvĿǰ��srcĿ¼Ӧ���������ӵ�:
src
������ CMakeLists.txt -> /opt/ros/noetic/share/catkin/cmake/toplevel.cmake
������ detection_pkg
������ vision_opencv
Ȼ�����detection_pkg����һ��data�ļ��д�yolov4��Ȩ�ص�����
cd detection_pkg
mkdir data4.��дdetection_pkg�µ��ļ�
�ļ���Ҫ������,�ֱ���Detection.cpp?Detection.h?main.cpp
main.cpp
#include "Detection.h"
#include <ros/ros.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include "std_msgs/Int8.h"
#include "std_msgs/String.h"
using namespace std;
using namespace cv;
using namespace dnn;
ros::Publisher pub;
Detection detection = Detection();
void imageCallback(const sensor_msgs::ImageConstPtr &msg)
{
Mat img;
cv_bridge::CvImageConstPtr cv_ptr;
cv_ptr = cv_bridge::toCvShare(msg, "bgr8");
img = cv_ptr->image;
detection.Initalize(img.cols, img.rows);
detection.Detecting(img);
imshow("Show RGBImage", detection.GetFrame());
char ch = waitKey(10);
string output = detection.GetResult();
std_msgs::String out_msg;
std::stringstream ss;
ss << output;
out_msg.data = ss.str();
pub.publish(out_msg);
}
int main(int argc, char **argv){
ROS_INFO("Opencv version: %s\n", CV_VERSION);
ros::init(argc, argv,"yolo4");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("/camera/color/image_raw",1,imageCallback);
pub = nh.advertise<std_msgs::String>("yolo4_result",1);
ros::spin();
return 0;
}Detection.h
#pragma once
#ifndef __DETECTION_H__
#define __DETECTION_H__
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <string.h>
#include <vector>
#include <fstream>
using namespace std;
using namespace cv;
using namespace dnn;
class Detection {
public:
Detection();
~Detection();
void Initalize(int width, int height);
void ReadModel();
bool Detecting(Mat frame);
vector<String> GetOutputNames();
void PostProcess();
void Drawer();
void DrawBoxes(int classId, float conf, int left, int top, int right, int bottom);
Mat GetFrame();
string GetResult();
int GetResWidth();
int GetResHeight();
private:
int m_width;
int m_height;
Net m_model;
Mat m_frame;
Mat m_blob;
vector<Mat> m_outs;
vector<float> m_confs;
vector<Rect> m_boxes;
vector<int> m_classIds;
vector<int> m_perfIndx;
int m_inpWidth;
int m_inpHeight;
float m_confThro;
float m_NMSThro;
vector<string> m_classes;
void Dump();
};
#endifDetection.cpp
#include "Detection.h"
using namespace std;
using namespace cv;
using namespace dnn;
Detection::Detection()
{
m_width = 0;
m_height = 0;
m_inpWidth = 320;
m_inpHeight = 320;
m_confThro = 0.25;
m_NMSThro = 0.4;
ReadModel();
}
Detection::~Detection(){};
void Detection::Dump()
{
m_outs.clear();
m_boxes.clear();
m_confs.clear();
m_classIds.clear();
m_perfIndx.clear();
}
void Detection::Initalize(int width, int height)
{
m_width = width;
m_height = height;
}
void Detection::ReadModel()
{
string classesFile = "/home/lqz/catkin_ws/src/detection_pkg/data/coco.names";
string modelConfig = "/home/lqz/catkin_ws/src/detection_pkg/data/yolov4-tiny.cfg";
string modelWeights = "/home/lqz/catkin_ws/src/detection_pkg/data/yolov4-tiny.weights";
ifstream ifs(classesFile.c_str());
string line;
while (getline(ifs, line))
m_classes.push_back(line);
m_model = readNetFromDarknet(modelConfig, modelWeights);
m_model.setPreferableBackend(DNN_BACKEND_OPENCV);
m_model.setPreferableTarget(DNN_TARGET_OPENCL);
}
bool Detection::Detecting(Mat frame)
{
Dump();
m_frame = frame.clone();
blobFromImage(m_frame, m_blob, 1 / 255.0, Size(m_inpWidth, m_inpHeight));
m_model.setInput(m_blob);
m_model.forward(m_outs, GetOutputNames());
PostProcess();
Drawer();
return true;
}
vector<string> Detection::GetOutputNames()
{
static vector<string> names;
if (names.empty())
{
vector<int> outLayers = m_model.getUnconnectedOutLayers();
vector<string> layersNames = m_model.getLayerNames();
names.resize(outLayers.size());
for (int i = 0; i < outLayers.size(); ++i)
{
names[i] = layersNames[outLayers[i] - 1];
}
}
return names;
}
void Detection::PostProcess()
{
for (int num = 0; num < m_outs.size(); num++)
{
Point Position;
double confidence;
float *data = (float *)m_outs[num].data;
for (int j = 0; j < m_outs[num].rows; j++, data += m_outs[num].cols)
{
Mat scores = m_outs[num].row(j).colRange(5, m_outs[num].cols);
minMaxLoc(scores, 0, &confidence, 0, &Position);
if (confidence > m_confThro)
{
int centerX = (int)(data[0] * m_width);
int centerY = (int)(data[1] * m_height);
int width = (int)(data[2] * m_width);
int height = (int)(data[3] * m_height);
int left = centerX - width / 2;
int top = centerY - height / 2;
m_classIds.push_back(Position.x);
m_confs.push_back((float)confidence);
m_boxes.push_back(Rect(left, top, width, height));
}
}
}
NMSBoxes(m_boxes, m_confs, m_confThro, m_NMSThro, m_perfIndx);
}
void Detection::Drawer()
{
for (int i = 0; i < m_perfIndx.size(); i++)
{
int idx = m_perfIndx[i];
Rect box = m_boxes[idx];
if (m_classIds[idx] == 0)
{
DrawBoxes(m_classIds[idx], m_confs[idx], box.x, box.y, box.x + box.width, box.y + box.height);
}
}
}
void Detection::DrawBoxes(int classId, float conf, int left, int top, int right, int bottom)
{
rectangle(m_frame, Point(left, top), Point(right, bottom), Scalar(255, 178, 50), 3);
string label = format("%.2f", conf);
if (!m_classes.empty())
{
CV_Assert(classId < (int)m_classes.size());
label = m_classes[classId] + ":" + label;
}
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
rectangle(m_frame, Point(left, top - round(1.5 * labelSize.height)), Point(left + round(1.5 * labelSize.width), top + baseLine), Scalar(255, 255, 255), FILLED);
putText(m_frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 0, 0), 1);
}
Mat Detection::GetFrame()
{
return m_frame;
}
string Detection::GetResult()
{
string result = "";
//��ȡ������Ѽ�����Ϣ
for (int i = 0; i < m_perfIndx.size(); i++)
{
int idx = m_perfIndx[i];
Rect box = m_boxes[idx];
// std::cout << "m_classIds[idx]"<< m_classIds[idx] << std::endl;
// std::cout << "m_confs[idx]"<< m_confs[idx] << std::endl;
// std::cout << "box.x"<< box.x << std::endl;
// std::cout << "box.y"<< box.y << std::endl;
// std::cout << "box.width"<< box.width << std::endl;
// std::cout << "box.height"<< box.height << std::endl;
if (m_classIds[idx] == 0) //��person��
{
stringstream strStream;
// int��float���Ͷ���������stringstream��
strStream << m_classIds[idx] << "," << m_confs[idx] << "," << box.x << "," << box.y << "," << box.width << "," << box.height;
result = strStream.str();
}
}
return result;
}
int Detection::GetResWidth(){
return m_width;
}
int Detection::GetResHeight(){
return m_height;
}5.��detection_pkg���CMakeList.txt
cmake_minimum_required(VERSION 3.0.2)
project(detection_pkg)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
cv_bridge
roscpp
rospy
std_msgs
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES detection_pkg
CATKIN_DEPENDS cv_bridge roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/detection_pkg.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/detection_pkg_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_detection_pkg.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
set(DETECTION Detection.cpp)
add_executable(yolo4 main.cpp ${DETECTION})
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
target_link_libraries(yolo4 ${OpenCV_LIBS})
target_link_libraries(yolo4 ${catkin_LIBRARIES})6.��������
lqz@lqz-PC:~/ros_ws$ catkin_make
Base path: /home/lqz/ros_ws
Source space: /home/lqz/ros_ws/src
Build space: /home/lqz/ros_ws/build
Devel space: /home/lqz/ros_ws/devel
Install space: /home/lqz/ros_ws/install
####
#### Running command: "cmake /home/lqz/ros_ws/src -DCATKIN_DEVEL_PREFIX=/home/lqz/ros_ws/devel -DCMAKE_INSTALL_PREFIX=/home/lqz/ros_ws/install -G Unix Makefiles" in "/home/lqz/ros_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/lqz/ros_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/noetic
-- This workspace overlays: /opt/ros/noetic
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.7.3", minimum required is "3")
-- Using PYTHON_EXECUTABLE: /usr/bin/python3
-- Using Debian Python package layout
-- Using empy: /usr/lib/python3/dist-packages/em.py
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/lqz/ros_ws/build/test_results
-- Forcing gtest/gmock from source, though one was otherwise available.
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python3 (found version "3.7.3")
-- Using Python nosetests: /usr/bin/nosetests3
-- catkin 0.8.10
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 5 packages in topological order:
-- ~~ - opencv_tests
-- ~~ - vision_opencv (metapackage)
-- ~~ - cv_bridge
-- ~~ - detection_pkg
-- ~~ - image_geometry
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'opencv_tests'
-- ==> add_subdirectory(vision_opencv/opencv_tests)
-- +++ processing catkin metapackage: 'vision_opencv'
-- ==> add_subdirectory(vision_opencv/vision_opencv)
-- +++ processing catkin package: 'cv_bridge'
-- ==> add_subdirectory(vision_opencv/cv_bridge)
-- Found PythonLibs: /usr/lib/x86_64-linux-gnu/libpython3.7m.so (found version "3.7.3")
-- Found Boost: /usr/include (found version "1.67.0") found components: python37
-- Found OpenCV: /usr/local (found suitable version "4.5.4", minimum required is "4") found components: opencv_core opencv_imgproc opencv_imgcodecs
-- Found PythonLibs: /usr/lib/x86_64-linux-gnu/libpython3.7m.so (found suitable version "3.7.3", minimum required is "3.7")
-- +++ processing catkin package: 'detection_pkg'
-- ==> add_subdirectory(detection_pkg)
-- Found OpenCV: /usr/local (found version "4.5.4")
-- +++ processing catkin package: 'image_geometry'
-- ==> add_subdirectory(vision_opencv/image_geometry)
-- Configuring done
-- Generating done
-- Build files have been written to: /home/lqz/ros_ws/build
####
#### Running command: "make -j12 -l12" in "/home/lqz/ros_ws/build"
####
Scanning dependencies of target std_msgs_generate_messages_eus
Scanning dependencies of target std_msgs_generate_messages_py
Scanning dependencies of target geometry_msgs_generate_messages_cpp
Scanning dependencies of target geometry_msgs_generate_messages_nodejs
Scanning dependencies of target sensor_msgs_generate_messages_nodejs
Scanning dependencies of target geometry_msgs_generate_messages_eus
Scanning dependencies of target std_msgs_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_cpp
Scanning dependencies of target sensor_msgs_generate_messages_lisp
Scanning dependencies of target sensor_msgs_generate_messages_py
Scanning dependencies of target geometry_msgs_generate_messages_py
Scanning dependencies of target geometry_msgs_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target geometry_msgs_generate_messages_nodejs
[ 0%] Built target geometry_msgs_generate_messages_eus
[ 0%] Built target sensor_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_cpp
[ 0%] Built target sensor_msgs_generate_messages_nodejs
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target sensor_msgs_generate_messages_py
[ 0%] Built target geometry_msgs_generate_messages_lisp
Scanning dependencies of target sensor_msgs_generate_messages_eus
Scanning dependencies of target std_msgs_generate_messages_nodejs
Scanning dependencies of target std_msgs_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target sensor_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_lisp
Scanning dependencies of target image_geometry
Scanning dependencies of target cv_bridge
[ 16%] Building CXX object vision_opencv/image_geometry/CMakeFiles/image_geometry.dir/src/pinhole_camera_model.cpp.o
[ 16%] Building CXX object vision_opencv/image_geometry/CMakeFiles/image_geometry.dir/src/stereo_camera_model.cpp.o
[ 33%] Building CXX object vision_opencv/cv_bridge/src/CMakeFiles/cv_bridge.dir/rgb_colors.cpp.o
[ 33%] Building CXX object vision_opencv/cv_bridge/src/CMakeFiles/cv_bridge.dir/cv_bridge.cpp.o
[ 41%] Linking CXX shared library /home/lqz/ros_ws/devel/lib/libimage_geometry.so
[ 41%] Built target image_geometry
[ 50%] Linking CXX shared library /home/lqz/ros_ws/devel/lib/libcv_bridge.so
[ 50%] Built target cv_bridge
Scanning dependencies of target cv_bridge_boost
Scanning dependencies of target yolo4
[ 66%] Building CXX object vision_opencv/cv_bridge/src/CMakeFiles/cv_bridge_boost.dir/module_opencv4.cpp.o
[ 66%] Building CXX object vision_opencv/cv_bridge/src/CMakeFiles/cv_bridge_boost.dir/module.cpp.o
[ 83%] Building CXX object detection_pkg/CMakeFiles/yolo4.dir/Detection.cpp.o
[ 83%] Building CXX object detection_pkg/CMakeFiles/yolo4.dir/main.cpp.o
[ 91%] Linking CXX shared library /home/lqz/ros_ws/devel/lib/python3/dist-packages/cv_bridge/boost/cv_bridge_boost.so
[ 91%] Built target cv_bridge_boost
[100%] Linking CXX executable /home/lqz/ros_ws/devel/lib/detection_pkg/yolo4
[100%] Built target yolo4
7.����yolov4��cfg��weights,����coco.names
����cfg�ҵ���Ӧ�����ؾͿ�����,���õ���yolov4-tiny?����������yolov4-tiny.cfg��https://github.com/AlexeyAB/darknet/releases/download/darknet_yolo_v4_pre/yolov4-tiny.weights
Ȼ�����Щ�ŵ�detection_pkg/data��
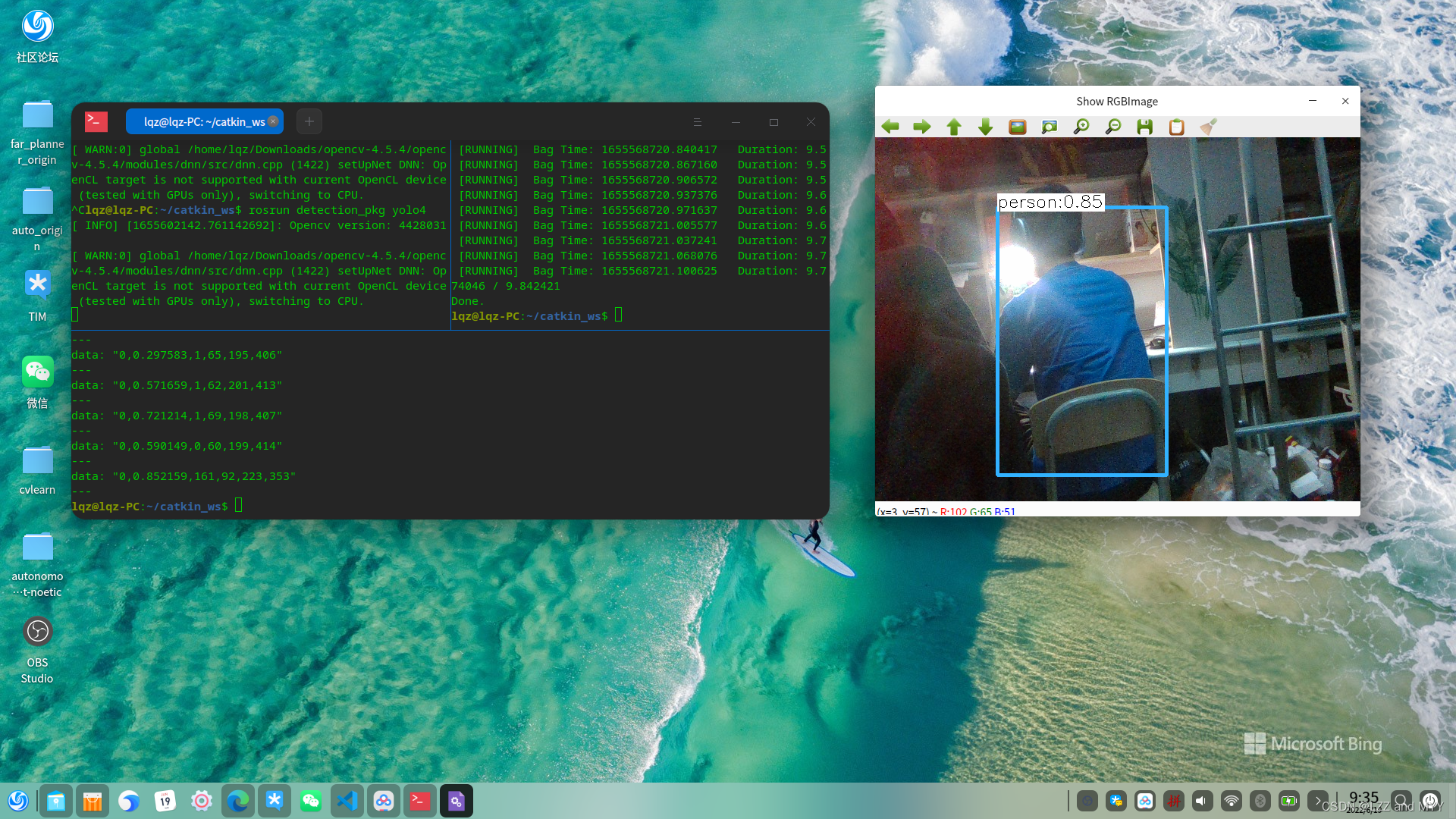
8.����
## terminal 1
roscore
## terminal 2
cd ros_ws
source ./devel/setup.bash
rosrun detection_pkg yolo4
## terminal 3
rosbag play xxxx.bag(�����˵�һ����Ƶ��bag�ͺ���)9.��camera,��far planner������
��main.cpp��,�Ķ��Ľڵ�����ͷ�Ľڵ�Ϊ
ros::Subscriber sub = nh.subscribe("/camera/image",1,imageCallback);���žͿ��Կ������ĵ���yolov4����Ƶ����~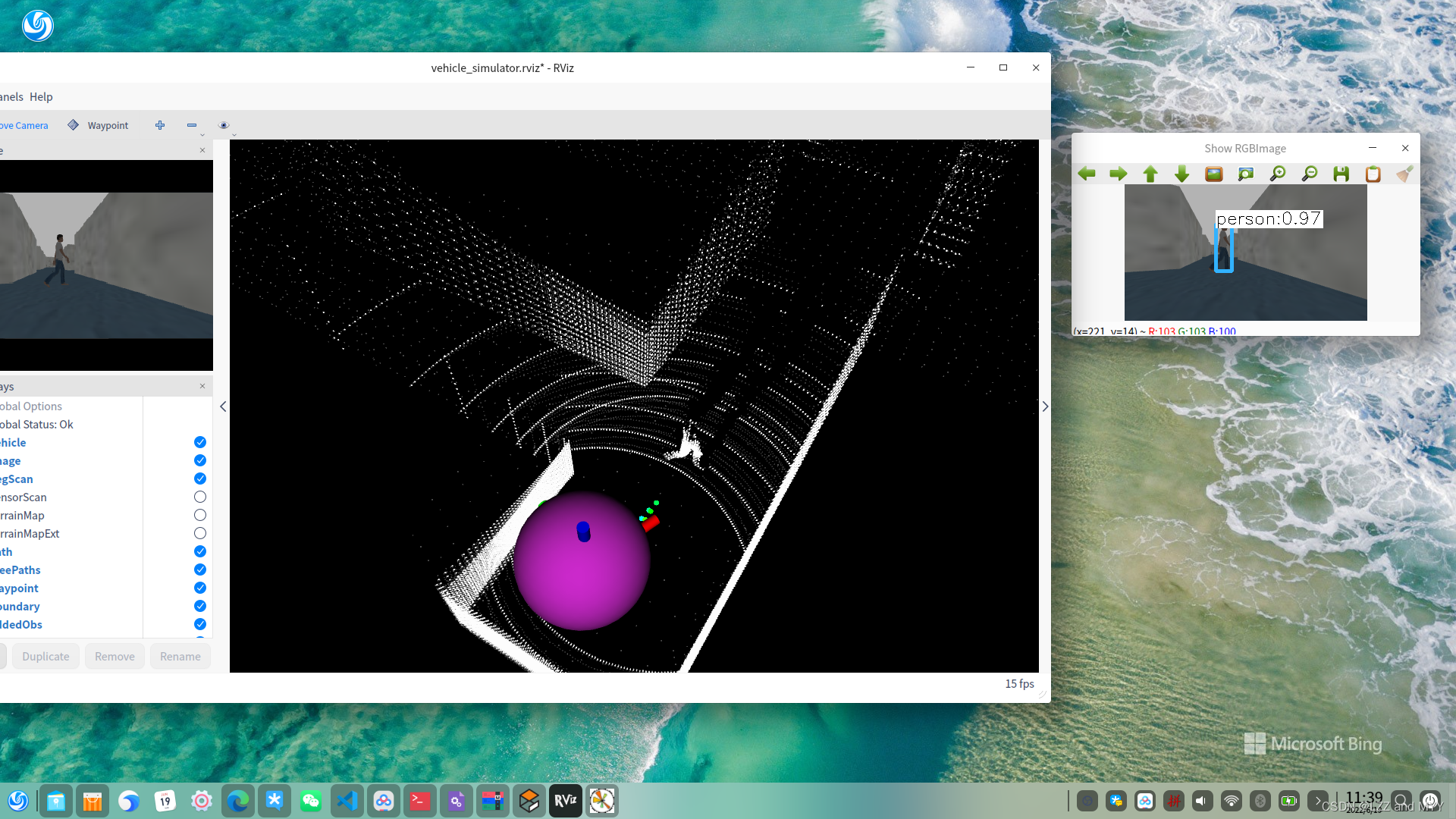
gazeboģ�Ϳ�?
��autonomous_exploration_development_environment-noetic��launch��ѡ���gazebo
Ȼ���walking person�����ȥ,�����Ҫ�ᶯ��,���Կ������ڵ���μ��붯̬�ϰ���