СЃзгТЫВЈ PFЁЊЁЊШ§ЮЌдШЫйдЫЖЏCVФПБъИњзй(СЃзгТЫВЈVSРЉеЙПЈЖћТќТЫВЈ)
ЖдгкИУВЉПЭИњзйДњТывдМАЮЪЬтЬНЬжПЩвдСЊЯЕ:WX:ZB823618313
ЖдгкЦфЫћИњзйЖЈЮЛЮЪЬтЕФДњТыМАЬНЬжвВПЩвдСЊЯЕ
дДДВЛвз,ТЗЙ§ЕФИїЮЛДѓРаЧыЕуИідо
СЃзгТЫВЈ PFЁЊЁЊШ§ЮЌдШЫйдЫЖЏCVФПБъИњзй(СЃзгТЫВЈVSРЉеЙПЈЖћТќТЫВЈ)
вЛЁЂЮЪЬтУшЪі(РыЩЂЪБМфЗЧЯпадЯЕЭГУшЪі)
ПМТЧвЛАуЗЧЯпадЯЕЭГФЃаЭ,
x
k
=
f
(
x
k
?
1
,
w
k
?
1
)
z
k
=
h
(
x
k
,
v
k
)
(1)
x_k=f(x_{k-1},w_{k-1}) \\ z_k=h(x_k,v_k ) \tag{1}
xk?=f(xk?1?,wk?1?)zk?=h(xk?,vk?)(1)
Цфжа
x
k
x_k
xk?ЮЊ
k
k
kЪБПЬЕФФПБъзДЬЌЯђСПЁЃ
z
k
z_k
zk?ЮЊ
k
k
kЪБПЬСПВтЯђСП(ДЋИаЦїЪ§Он)ЁЃетРяВЛПМТЧПижЦЦї
u
k
u_k
uk?ЁЃ
w
k
{w_k}
wk?КЭ
v
k
{v_k}
vk?ЗжБ№ЪЧЙ§ГЬдыЩљађСаКЭСПВтдыЩљађСа,ВЂМйЩш
w
k
w_k
wk?КЭ
v
k
v_k
vk?ЮЊСуОљжЕИпЫЙАздыЩљ,ЦфЗНВюЗжБ№ЮЊ
Q
k
Q_k
Qk?КЭ
R
k
R_k
Rk?ЕФИпЫЙАздыЩљ,МД
w
k
ЁЋ
(
0
,
Q
k
)
w_k\sim(0,Q_k)
wk?ЁЋ(0,Qk?),
v
k
ЁЋ
(
0
,
R
k
)
v_k\sim(0,R_k)
vk?ЁЋ(0,Rk?),ЧвТњзуШчЯТЙиЯЕ(ЯпадИпЫЙМйЩш)ЮЊ:
E
[
w
i
v
j
Ёф
]
=
0
E
[
w
i
w
j
Ёф
]
=
0
i
Ёй
j
E
[
v
i
v
j
Ёф
]
=
0
i
Ёй
j
\begin{aligned} E[w_iv_j'] &=0\\ E[w_iw_j'] &=0\quad i\neq j \\ E[v_iv_j'] &=0\quad i\neq j \end{aligned}
E[wi?vjЁф?]E[wi?wjЁф?]E[vi?vjЁф?]?=0=0iЊС?=j=0iЊС?=j?
ЖўЁЂБДвЖЫЙТЫВЈ
ЖЈвх
1
1
1 ~
k
k
kЪБПЬЖдзДЬЌ
x
k
x_k
xk?ЕФЫљгаВтСПЪ§ОнЮЊ
z
k
=
[
z
1
T
,
z
2
T
,
?
?
,
z
k
T
]
T
z^k=[z_1^T,z_2^T,\cdots,z_k^T]^T
zk=[z1T?,z2T?,?,zkT?]T
БДвЖЫЙТЫВЈЮЪЬтОЭЪЧМЦЫуЖд k k kЪБПЬзДЬЌ x x xЙРМЦЕФжУаХГЬЖШ,ЮЊДЫЙЙдьИХТЪУмЖШКЏЪ§ p ( x k ЈO z k ) p(x_k |z^k) p(xk?ЈOzk),дкИјЖЈГѕЪМЗжВМ p ( x 0 ЈO z 0 ) = p ( x 0 ) p(x_0|z_0)= p(x_0) p(x0?ЈOz0?)=p(x0?)Кѓ,ДгРэТлЩЯПД,ПЩвдЭЈЙ§дЄВтКЭИќаТСНИіВНжшЕнЭЦЕУЕНИХТЪУмЖШКЏЪ§ p ( x k ЈO z k ) p(x_k |z^k) p(xk?ЈOzk)ЕФжЕЁЃ
ЪЧВЛЪЧПЈЖћТќТЫВЈЕФГћаЮГіЯжСЫ,ЙўЙўЙў,дЄВтЁЂИќаТвВДцдкKFжаЁЃ
2.1ЁЂ дЄВт
ЯжМйЖЈ
k
?
1
k- 1
k?1ЪБПЬЕФИХТЪУмЖШКЏЪ§вбжЊ,дђЭЈЙ§НЋChapman-KolmogorovЕШЪНгІгУ
гкЖЏЬЌЗНГЬ(1),МДПЩдЄВт
k
k
kЪБПЬзДЬЌЕФЯШбщИХТЪУмЖШКЏЪ§ЮЊ
p
(
x
k
ЈO
z
k
?
1
)
=
Ёв
p
(
x
k
ЈO
x
k
?
1
)
p
(
k
?
1
ЈO
z
k
?
1
)
d
x
k
?
1
)
(2)
p(x_k |z^{k-1})=\int p(x_k |x_{k-1})p({k-1} |z^{k-1}) dx_{k-1}) \tag{2}
p(xk?ЈOzk?1)=Ёвp(xk?ЈOxk?1?)p(k?1ЈOzk?1)dxk?1?)(2)
ЪЕМЪЩЯ,зДЬЌзЊвЦЗНГЬаДЮЊИХТЪУмЖШЕФаЮЪНМДЮЊ:
x
k
=
f
(
x
k
?
1
,
w
k
?
1
)
=
ЕШМл
p
(
x
k
ЈO
x
k
?
1
)
x_k=f(x_{k-1},w_{k-1}) \underset{\text{ЕШМл}}= p(x_k |x_{k-1})
xk?=f(xk?1?,wk?1?)ЕШМл=?p(xk?ЈOxk?1?)
ЪН(2)жавўКЌМйЖЈСЫ
p
(
x
k
ЈO
x
k
?
1
)
=
p
(
x
k
ЈO
x
k
?
1
,
z
k
?
1
)
p(x_k |x_{k-1})= p(x_k |x_{k-1}, z^{k-1})
p(xk?ЈOxk?1?)=p(xk?ЈOxk?1?,zk?1),ЪЕМЪЩЯетБОЩэдкетРяОЭЪЧГЩСЂЕФ,Лљгк(1)ЪНЕФТэЖћПЩЗђЙ§ГЬЁЃ
2.2ЁЂ ИќаТ
дкЛёЕУ
p
(
x
k
ЈO
z
k
?
1
)
p(x_k |z^{k-1})
p(xk?ЈOzk?1)ЕФЛљДЁЩЯ,НсКЯ
k
k
kЪБПЬЕУЕНЕФаТЕФСПВтжЕ,ЛљгкБДвЖЫЙЙЋЪН,ПЩвдМЦЫу
k
k
kЪБПЬзДЬЌЕФКѓбщИХТЪУмЖШКЏЪ§:
p
(
x
k
ЈO
z
k
)
=
p
(
z
k
ЈO
x
k
)
p
(
x
k
ЈO
z
k
?
1
)
p
(
z
k
ЈO
z
k
?
1
)
(3)
p(x_k |z^{k})=\frac{p(z_k |x_k)p(x_k |z^{k-1})}{p(z_k |z^{k-1})} \tag{3}
p(xk?ЈOzk)=p(zk?ЈOzk?1)p(zk?ЈOxk?)p(xk?ЈOzk?1)?(3)
ЪНжаЗжзг
p
(
z
k
ЈO
z
k
?
1
)
p(z_k |z^{k-1})
p(zk?ЈOzk?1)гаШЋИХТЪЙЋЪНЕУЕН
p
(
z
k
ЈO
z
k
?
1
)
=
Ёв
p
(
z
k
ЈO
x
k
)
p
(
x
k
ЈO
z
k
?
1
)
d
x
k
(4)
p(z_k |z^{k-1})=\int p(z_k |x_k)p(x_k |z^{k-1}) dx_{k} \tag{4}
p(zk?ЈOzk?1)=Ёвp(zk?ЈOxk?)p(xk?ЈOzk?1)dxk?(4)
ЮвОЭЫЕАЩ,ЩЯЪіЙ§ГЬЪЕМЪЩЯБДвЖЫЙКѓбрЭЦЖЯЕФЙЋЪН,ЙўЙўЙўЙўАЁЙў
ЪЕМЪЩЯетвВЪЧПЈЖћТќТЫВЈЕФИќаТЫМЯы:дк k k kЪБПЬЕУЕНВтСП z k z_k zk?Кѓ,РћгУВтСП z k z_k zk?аое§ЯШбщИХТЪ,НјЖјЛёЕУЕБЧАЪБПЬзДЬЌЕФКѓбщИХТЪЁЃЮве§ЪЧЬЋЛњжЧСЫ,ЙўЙўАЁЙў
Ш§ЁЂСЃзгТЫВЈ PF(БДвЖЫЙТЫВЈЕФMCЪЕЯж)
СЃзгТЫВЈЪЕМЪЩЯЪЧЕнЭЦБДвЖЫЙТЫВЈЕФУЩЬиПЈТхЪЕЯжЕФвЛжжЫуЗЈ,МДвЛжжНќЫЦЕФБДвЖЫЙТЫВЈЁЃ
КЫаФЫМЯы:ЪЧЪЙгУвЛзщОпгаЯргІШЈжЕЕФЫцЛњбљБО(СЃзг)РДБэЪОзДЬЌЕФКѓбщЗжВМЁЃИУЗНЗЈЕФЛљБОЫМТЗЪЧбЁШЁвЛИіживЊадИХТЪУмЖШВЂДгжаНјааЫцЛњГщбљ,ЕУЕНвЛаЉДјгаЯргІШЈжЕЕФЫцЛњбљБОКѓ,дкзДЬЌЙлВтЕФЛљДЁЩЯЕїНкШЈжЕЕФДѓаЁЁЃКЭСЃзгЕФЮЛжУ,дйЪЙгУетаЉбљБОРДБЦНќзДЬЌКѓбщЗжВМ,зюКѓНЋетзщбљБОЕФМгШЈЧѓКЭзїЮЊзДЬЌЕФЙРМЦжЕЁЃСЃзгТЫВЈВЛЪмЯЕЭГФЃаЭЕФЯпадКЭИпЫЙМйЩшдМЪј,ВЩгУбљБОаЮЪНЖјВЛЪЧКЏЪ§аЮЪНЖдзДЬЌИХТЪУмЖШНјааУшЪі,ЪЙЦфВЛашвЊЖдзДЬЌБфСПЕФИХТЪЗжВМНјааЙ§ЖрЕФдМЪј,вђЖјдкЗЧЯпадЗЧИпЫЙЖЏЬЌЯЕЭГжаЙуЗКгІгУЁЃОЁЙмШчДЫ,СЃзгТЫВЈФПЧАШдДцдкМЦЫуСПЙ§ДѓЁЂСЃзгЭЫЛЏЕШЙиМќЮЪЬтиНД§ЭЛЦЦЁЃ
ЭЈГЃЧщПіЯТбЁдёЯШбщЗжВМзїЮЊживЊадУмЖШКЏЪ§ЁЂМД
q
(
x
k
ЈO
x
k
?
1
(
i
)
,
z
k
)
=
p
(
x
k
ЈO
x
k
?
1
(
i
)
)
q(x_k |x_{k-1}^{(i)}, z_{k})=p(x_k |x_{k-1}^{(i)})
q(xk?ЈOxk?1(i)?,zk?)=p(xk?ЈOxk?1(i)?)
ЖдИУКЏЪ§ШЁживЊадШЈжЕЮЊ
w
k
(
i
)
=
w
k
?
1
(
i
)
p
(
z
k
ЈO
x
k
(
i
)
)
w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)})
wk(i)?=wk?1(i)?p(zk?ЈOxk(i)?)
ЭЌбљ
w
k
(
i
)
w_k^{(i)}
wk(i)?ашвЊЙщвЛЛЏЕУЕН
w
~
k
(
i
)
\tilde{w}_k^{(i)}
w~k(i)?ЁЃ
БъзМЕФСЃзгТЫВЈЫуЗЈВНжшЮЊ:
СЃзгТЫВЈPF:
Step 1: ИљОн p ( x 0 ) p(x_{0}) p(x0?)ВЩбљЕУЕН N N NИіСЃзг x 0 ( i ) ЁЋ p ( x 0 ) x_0^{(i)} \sim p(x_{0}) x0(i)?ЁЋp(x0?)
For i = 2 : N i=2:N i=2:N
??Step 2: ИљОнзДЬЌзЊвЦКЏЪ§ВњЩњаТЕФСЃзгЮЊ:$ x k ( i ) ЁЋ p ( x k ЈO x k ? 1 ( i ) ) x_k^{(i)} \sim p(x_{k} |x_{k-1}^{(i)}) xk(i)?ЁЋp(xk?ЈOxk?1(i)?)
??Step 3: МЦЫуживЊадШЈжЕ: w k ( i ) = w k ? 1 ( i ) p ( z k ЈO x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)?=wk?1(i)?p(zk?ЈOxk(i)?)
??Step 4: ЙщвЛЛЏживЊадШЈжЕ: w ~ k ( i ) = w k ( i ) ЁЦ j = 1 N w k ( j ) \tilde{w}_k^{(i)}=\frac{w_k^{(i)}}{\sum_{j=1}^Nw_k^{(j)}} w~k(i)?=ЁЦj=1N?wk(j)?wk(i)??
??Step 5: ЪЙгУжиВЩбљЗНЗЈЖдСЃзгНјаажиВЩбљ(вдЫцЛњжиВЩбљКЭЯЕЭГжиВЩбљЮЊР§)
??Step 6: ЕУЕН k k kЪБПЬЕФКѓбщзДЬЌЙРМЦ:
E [ x ^ k ] = ЁЦ i = 1 N x k ( i ) w ~ k ( i ) E[\hat{x}_{k}]= \sum_{i=1}^Nx_{k}^{(i)}\tilde{w}_k^{(i)} E[x^k?]=i=1ЁЦN?xk(i)?w~k(i)?
End For
ЫуЗЈ:ЯЕЭГжиВЩбљ (systematic resampling)
For i = 1 : N i=1:N i=1:N
??Step 1: ГѕЪМЛЏРлЛ§ИХТЪУмЖШКЏЪ§CDF: c 1 = 0 c_1=0 c1?=0
For i = 2 : N i=2:N i=2:N
??Step 2: ЙЙдьCDF: c i = c i ? 1 + w k ( i ) c_i=c_{i-1}+w_k^{(i)} ci?=ci?1?+wk(i)?
??Step 3: ДгCDFЕФЕзВППЊЪМ: i = 1 i=1 i=1
??Step 4: ВЩбљЦ№ЪМЕу: u 1 = U [ 0 , 1 / N ] u_1=\mathcal{U}[0,1/N] u1?=U[0,1/N]
End For
For j = 1 : N j=1:N j=1:N
??Step 5: биCDFвЦЖЏ: u j = u 1 + ( j ? 1 ) / N u_j=u_{1}+(j-1)/N uj?=u1?+(j?1)/N
??Step 6: While u j > c i u_j>c_i uj?>ci?
?????? i = i + 1 i=i+1 i=i+1
?????End While
??Step 7: ИГжЕСЃзг: x k ( j ) = x k ( i ) x_k^{(j)}=x_k^{(i)} xk(j)?=xk(i)?
??Step 8: ИГжЕШЈжЕ: w k ( j ) = 1 / N w_k^{(j)}=1/N wk(j)?=1/N
??Step 9: ИГжЕИИДњ: i ( j ) = i i^{(j)}=i i(j)=i
End For
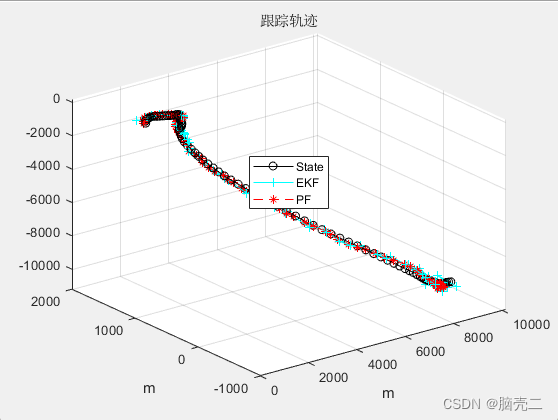
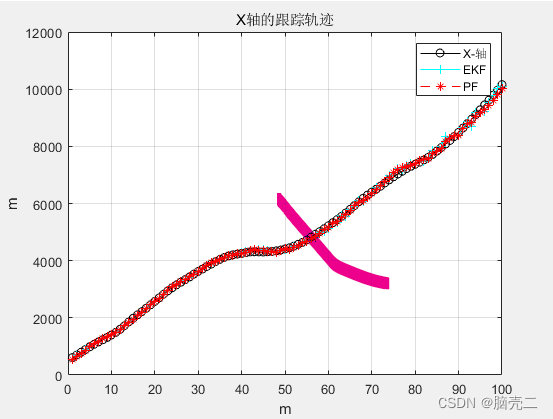
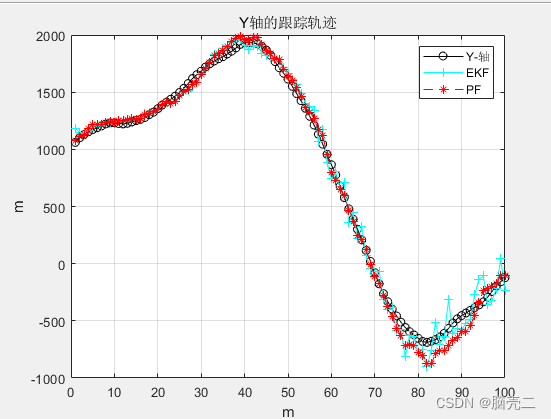
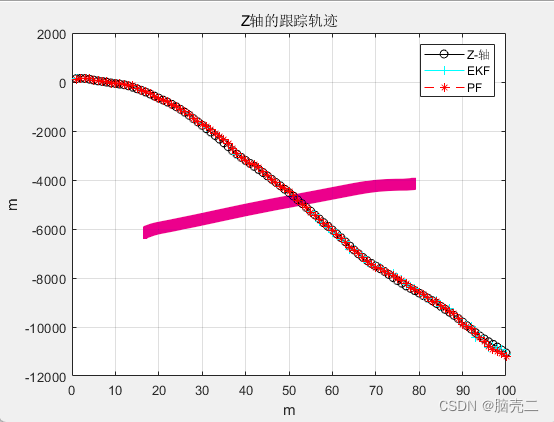
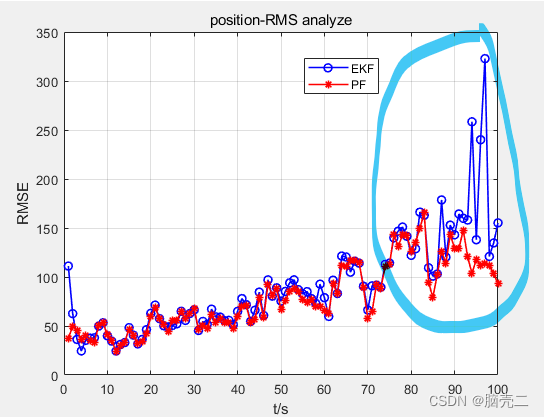
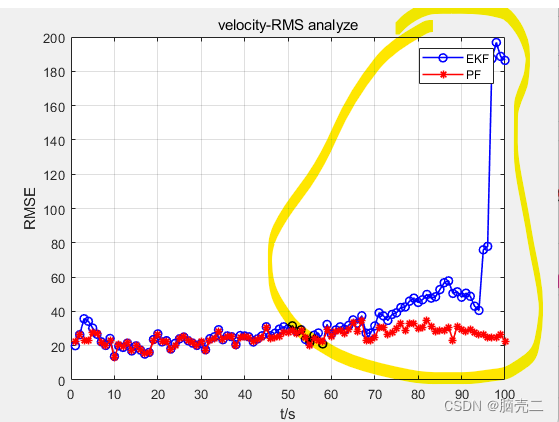
ЫФЁЂЗТецГЁОА:Ш§ЮЌРзДяФПБъИњзй
4.1 ЗТецГЁОА(Ш§ЮЌдШЫйФПБъ)
ФПБъФЃаЭ
ПМТЧвЛИїШ§ЮЌЕФдШЫйдЫЖЏФПБъ(CV ФЃаЭ):
x
k
+
1
=
F
k
x
k
+
G
k
w
k
x_{k+1}=F_kx_k+G _kw_k
xk+1?=Fk?xk?+Gk?wk?
ЦфжазДЬЌЯђСП
x
k
=
[
x
k
,
x
ЈB
k
,
y
k
,
y
ЈB
k
,
z
k
,
z
ЈB
k
]
Ёф
x_k=[x_k,\dot{x}_k,y_k,\dot{y}_k,z_k,\dot{z}_k]'
xk?=[xk?,xЈBk?,yk?,yЈB?k?,zk?,zЈBk?]Ёф;дыЩљЮЊ
w
k
=
[
w
x
,
w
y
,
w
z
]
Ёф
w_k=[w_x,w_y,w_z]'
wk?=[wx?,wy?,wz?]Ёф;зДЬЌзЊвЦОиеѓ
F
k
F_k
Fk?КЭдыЩљЧ§ЖЏОиеѓ
G
k
G_k
Gk?ШчЯТ
F
k
=
[
1
T
0
0
0
0
0
1
0
0
0
0
0
0
1
T
0
0
0
0
0
1
0
0
0
0
0
0
1
T
0
0
0
0
0
1
]
ІЃ
k
=
[
1
/
2
T
2
0
0
T
0
0
0
1
/
2
T
2
0
0
T
0
0
1
/
2
T
2
0
0
T
]
F_k=\begin{bmatrix}1 & T & 0 & 0 & 0 & 0\\0 & 1 & 0 & 0 & 0 & 0 \\0 & 0 & 1 & T & 0 & 0\\0 & 0 & 0 & 1 & 0 & 0\\0 & 0 & 0 & 0 & 1 & T\\0 & 0 & 0 & 0 & 0 & 1\end{bmatrix} \qquad\varGamma_k=\begin{bmatrix}1/2T^2 & 0 & 0 \\T & 0 & 0 \\0 & 1/2T^2 & 0 \\0 & T & \\0 & 0 & 1/2T^2 \\0 & 0 & T\end{bmatrix}
Fk?=?????????100000?T10000?001000?00T100?000010?0000T1??????????ІЃk?=?????????1/2T2T0000?001/2T2T00?0001/2T2T??????????
ВЩбљЪБМф
T
=
1
s
T=1s
T=1s. ГѕЪМзДЬЌЮЊ
x
0
ЁЋ
(
x
ЁЅ
0
,
P
0
)
x
ЁЅ
0
=
[
1
km
,
20
m/s
,
1
km
,
20
m/s
,
1
km
,
20
m/s
]
Ёф
P
0
=
diag
(
1
0
5
m
2
,
1
0
2
m
2
/
s
2
,
1
0
5
m
2
,
1
0
2
m
2
/
s
2
,
1
0
5
m
2
,
1
0
2
m
2
/
s
2
)
x_0\sim(\bar{x}_0,P_0)\\\bar{x}_{0}=[1\text{km}, 20\text{m/s} ,1\text{km}, 20\text{m/s} ,1\text{km}, 20\text{m/s}]'\\P_{0}=\text{diag}(10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2, 10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2, 10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2)
x0?ЁЋ(xЁЅ0?,P0?)xЁЅ0?=[1km,20m/s,1km,20m/s,1km,20m/s]ЁфP0?=diag(105m2,102m2/s2,105m2,102m2/s2,105m2,102m2/s2)
Й§ГЬдыЩљОљжЕКЭЗНВюЗжБ№ЮЊ
q
=
10
q=10
q=10
w
ЁЅ
k
=
[
0
,
0
,
0
]
Ёф
Q
k
=
[
q
2
0
0
0
q
2
0
0
0
q
2
]
\bar{w}_k=[0,0, 0]'\\Q_k=\begin{bmatrix}q^2 & 0& 0 \\0 & q^2 & 0\\0&0 & q^2 \end{bmatrix}
wЁЅk?=[0,0,0]ЁфQk?=???q200?0q20?00q2????
ШчЙћЮЊЗЧЯпадФПБъ,дђНЋзДЬЌзЊвЦОиеѓ F k F_k Fk?ДњЬцЮЊбХПЩБШОиеѓМДПЩЁЃЮЊСЫВЛЪЧвЛАуадетРяВЩгУЯпадФЃаЭНјааЗТецЁЃжївЊДІРэФПБъИњзй,РзДяСПВтДцдкЕФЗЧЯпадТЫВЈЮЪЬтЁЃ
РзДяСПВтФЃаЭ
дкШ§ЮЌЧщПіЯТ,РзДяСПВтЮЊОрРыКЭНЧЖШ
r
k
m
=
r
k
+
r
~
k
b
k
m
=
b
k
+
b
~
k
e
k
m
=
e
k
+
e
~
k
{r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k\\ e^m_k=e_k+\tilde{e}_k
rkm?=rk?+r~k?bkm?=bk?+b~k?ekm?=ek?+e~k?
Цфжа
r
k
=
(
x
k
?
x
0
)
+
(
y
k
?
y
0
)
2
)
b
k
=
tan
?
?
1
y
k
?
y
0
x
k
?
x
0
e
k
=
tan
?
?
1
z
k
?
z
0
(
x
k
?
x
0
)
2
+
(
y
k
?
y
0
)
2
r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ e_k=\tan^{-1}{\frac{z_k-z_0}{\sqrt{(x_k-x_0)^2+(y_k-y_0)^2}}}\\
rk?=(xk??x0?)+(yk??y0?)2)?bk?=tan?1xk??x0?yk??y0??ek?=tan?1(xk??x0?)2+(yk??y0?)2?zk??z0??
[
x
0
,
y
0
,
z
0
]
[x_0,y_0,z_0]
[x0?,y0?,z0?]ЮЊРзДязјБъ,вЛАуЧщПіЮЊ0ЁЃРзДяСПВтЮЊ
z
k
=
[
r
k
,
b
k
,
e
k
]
Ёф
z_k=[r_k,b_k,e_k]'
zk?=[rk?,bk?,ek?]ЁфЁЃРзДяСПВтЗНВюЮЊ
R
k
=
cov
(
v
k
)
=
[
Ів
r
2
0
0
0
Ів
b
2
0
0
0
Ів
e
2
]
R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 &0\\0 & \sigma_b^2 &0\\0&0& \sigma_e^2 \end{bmatrix}
Rk?=cov(vk?)=???Івr2?00?0Івb2?0?00Івe2?????Чв
Ів
r
=
20
m
\sigma_r=20m
Івr?=20m,
Ів
b
=
20
m
r
a
d
\sigma_b=20mrad
Івb?=20mrad,
Ів
e
=
15
m
r
a
d
\sigma_e=15mrad
Івe?=15mradЁЃ
4.2 ИњзйЙьМЃ
4.3 ИњзйЮѓВю
ЮхЁЂВПЗжДњТы
ЖдгкИУВЉПЭИњзйДњТывдМАЮЪЬтЬНЬжПЩвдСЊЯЕ:WX:ZB823618313
ЖдгкЦфЫћИњзйЖЈЮЛЮЪЬтЕФДњТыМАЬНЬжвВПЩвдСЊЯЕ
5.1ЁЂжїКЏЪ§ВПЗжДњТы
clear all; close all; clc;
%% initial parameter
n=6; %зДЬЌЮЌЪ§ ;
T=1; %ВЩбљЪБМф
M=1; %РзДяЪ§ФП
N=100; %дЫаазмЪБПЬ
MC=10; %УЩЬиПЈТхДЮЪ§
global N_pf
N_pf=5000;% ВЩбљЕуЪ§PF
chan=1; %ТЫВЈЦїЭЈЕР,етРяжЛгавЛИіТЫВЈЦї
w_mu=[0,0,0]';% mean of process noise
v_mu=[0,0,0]';% mean of measurement noise
%% target model
%covariance of process noise
q=10; %m/s^2
Qk=q^2*eye(3);
% state matrix
% CV
Fk=[1,T,0,0,0,0;
0,1,0,0,0,0;
0,0,1,T,0,0;
0,0,0,1,0,0;
0,0,0,0,1,T;
0,0,0,0,0,1 ];
Gk=[ T^2/2, 0, 0;
T, 0, 0;
0,T^2/2, 0;
0, T, 0;
0, 0,T^2/2;
0, 0, T ];
%СПВтФЃаЭ
sigma_r(1)=20; sigma_b(1)=20e-3; sigma_e(1)=15e-3; % covariance of measurement noise (radar)
% sigma_r=300; sigma_b=200e-3; sigma_e=100e-3;
Rk=diag([sigma_r(1)^2, sigma_b(1)^2,sigma_e(1)^2]);
xp=[0,0,0,0,0,0];%РзДяЮЛжУ
%% ЖЈвхДцДЂПеМф
sV=zeros(n,N,MC); % зДЬЌ
eV=zeros(n,N,MC,chan); %ЙРМЦ
PV=zeros(n,n,N,MC,chan);%аЗНВю
rV=zeros(3,N,MC,M); % %СПВт
for i=1:MC
sprintf('rate of process:%3.1f%%',(2*i)/(4*MC)*100)
% ГѕЪМзДЬЌЕФОљжЕКЭЗНВю
x=[1000,500,1000,0,100,100]';
P_0=diag([1e4,10^2,1e4,10^2, 1e4,10^2]);
x=[1000,80,1000,50,100,10]';
P_0=diag([1e5,10^2,1e5,10^2, 1e5,10^2]);
% x=[100,50,100,50,100,50]';
% P_0=diag([5e5,1e3,5e5,1e3,5e5,1e3]); %initial covariance
xk_EKF=x; Pk_EKF=P_0; % P0|0 x0|0
xk_pf=x; Pk_pf=P_0; % P0|0 x0|0
%ВњЩњNИіСЃзг
for ii = 1 : N_pf
xpart(:,ii) = x+ sqrtm(P_0) * randn(6,1);
end
5.2ЁЂPFВПЗжДњТы
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%КЏЪ§ЙІФм:ЪЕЯжЫцЛњжиВЩбљЫуЗЈ
%ЪфШыВЮЪ§:weightЮЊдЪМЪ§ОнЖдгІЕФШЈжиДѓаЁ
%ЪфГіВЮЪ§:outIndexЪЧИљОнweightЖдinIndexЩИбЁКЭИДжЦНсЙћ
function outIndex=randomR(weight)
%ЛёЕУЪ§ОнЕФГЄЖШ
L=length(weight);
%ГѕЪМЛЏЪфГіЫїв§ЯђСП,ГЄЖШгыЪфШыЫїв§ЯђСПЯрЕШ
outIndex=zeros(1,L);
%ЕквЛВН:ВњЩњ[0,1]ЩЯОљдШЗжВМЕФЫцЛњЪ§зщ,ВЂЩ§ађХХађ
u=unifrnd(0,1,1,L);
u=sort(u);
%u=(1:L)/L%етИіЪЧЭъШЋОљдШ
%ЕкЖўВН:МЦЫуСЃзгШЈжиЛ§РлКЏЪ§cdf
cdf=cumsum(weight);
%ЕкШ§ВН:КЫаФМЦЫу
i=1;
for j=1:L
%ДЫДІЕФЛљБОдРэЪЧ:uЪЧОљдШЕФ,БиШЛЪЧШЈжЕДѓЕФЕиЗН
%гаИќЖрЕФЫцЛњЪ§ТфШыИУЧјМф,вђДЫЛсБЛЖрДЮИДжЦ
while(i<=L)&(u(i)<=cdf(j))
%ИДжЦШЈжЕДѓЕФСЃзг
outIndex(i)=j;
%МЬајПМВьЯТвЛИіЫцЛњЪ§,ПДЫќТфдкФФИіЧјМф
i=i+1;
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% ЯЕЭГжиВЩбљзгКЏЪ§
% ЪфШыВЮЪ§:weightЮЊдЪМЪ§ОнЖдгІЕФШЈжиДѓаЁ
% ЪфГіВЮЪ§:outIndexЪЧИљОнweightЩИбЁКЭИДжЦНсЙћ
function outIndex = systematicR(weight);
N=length(weight);
N_children=zeros(1,N);
label=zeros(1,N);
label=1:1:N;
s=1/N;
auxw=0;
auxl=0;
li=0;
T=s*rand(1);
j=1;
Q=0;
i=0;
u=rand(1,N);
while (T<1)
if (Q>T)
T=T+s;
N_children(1,li)=N_children(1,li)+1;
else
i=fix((N-j+1)*u(1,j))+j;
auxw=weight(1,i);
li=label(1,i);
Q=Q+auxw;
weight(1,i)=weight(1,j);
label(1,i)=label(1,j);
j=j+1;
end
end
index=1;
for i=1:N
if (N_children(1,i)>0)
for j=index:index+N_children(1,i)-1
outIndex(j) = i;
end;
end;
index= index+N_children(1,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%