��װ��ؿ�
1:��װcmake,gcc,g++,git,�Ѿ���װ�ĺ���
sudo apt-get update
sudo apt-get install cmake gcc g++ git
2:��װPangolin,�����ص���0.6�ȶ���
�뽫���غõ��ļ��и���ΪPangolin,������Ŀ¼�С����,�´�һ���ն�,����������������:
sudo apt-get install libxkbcommon-dev
sudo apt-get install wayland-protocols
sudo apt install libglew-dev
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install
�ⰲװ��ɺ�,����һ��,�ܲ���ʹ��,���´�һ���ն�,����һ������:
cd Pangolin
cd examples/HelloPangolin
mkdir build && cd build
cmake ..
make
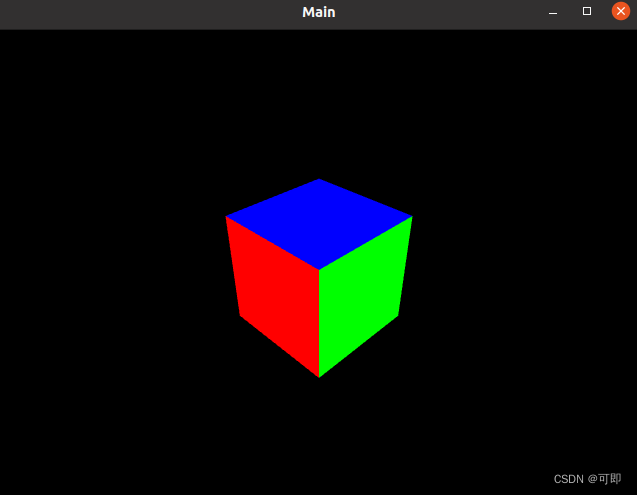
./HelloPangolin
������һ����ɫ����,��װ�ɹ���
3:��װEigen3
sudo apt-get install libeigen3-dev
4:��װopencv3(��װ4���ͻ!)
����opencv3.4.15,https://github.com/opencv/opencv/archive/3.4.15.zip
��һ�����ն�,������������:
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
cd opencv3.4.15
mkdir build
cd build
cmake ..
make -j
sudo make install
��װ��ɺ�,��һ�����ն�:����:
sudo gedit /etc/ld.so.conf.d/opencv.conf
��ʱ�����һ���ĵ�,���ĵ����һ������:
/usr/local/lib
����ú�,�˳�,��һ�����ն�,����:
sudo ldconfig
�ٴ�һ�����ն�,����:
sudo gedit /etc/bash.bashrc
��ʱ�����һ���ĵ�,���ĵ����һ���������´���:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
������ɺ�,���沢�˳�,����һ�����ն�,����:
source /etc/bash.bashrc
sudo apt-get install mlocate
sudo updatedb
����opencv:�������´���:
cd opencv3.4.15/samples/cpp/example_cmake
cmake .
make
./opencv_example
���ִ���:E: Unable to locate package libjasper-dev
���:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
��װ����ORB_SLAM2
ԭ������Ҫ�ĺܶ����,��Ҫ����ȥ�ٶ�,���error���ɲο������Ҹĺõ�����
����: https://pan.baidu.com/s/1�CEDwLK86capVd13FC3EWw ��ȡ��: cx3y
cd ORB_SLAM2
chmod +x build.sh
./build.sh
��Ҫ��ROS����������ORB_SLAM,����Ҫִ��������������:
chmod +x build_ros.sh
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/ORB-SLAM2/src/ORB_SLAM2/Examples/ROS
./build_ros.sh
����������´���:
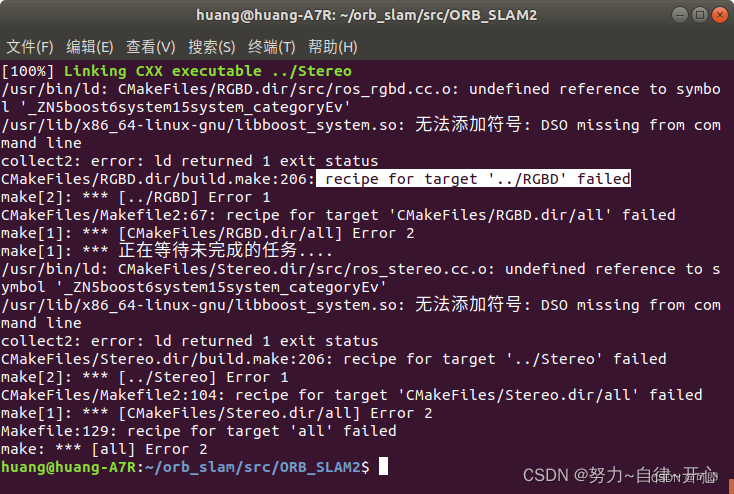
�������:
��home/orb_slam/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/�ļ����µ�CMakeLists.txt�ļ���
��set(LIBS xxxxx �ĺ������������һ�����:
-lboost_system
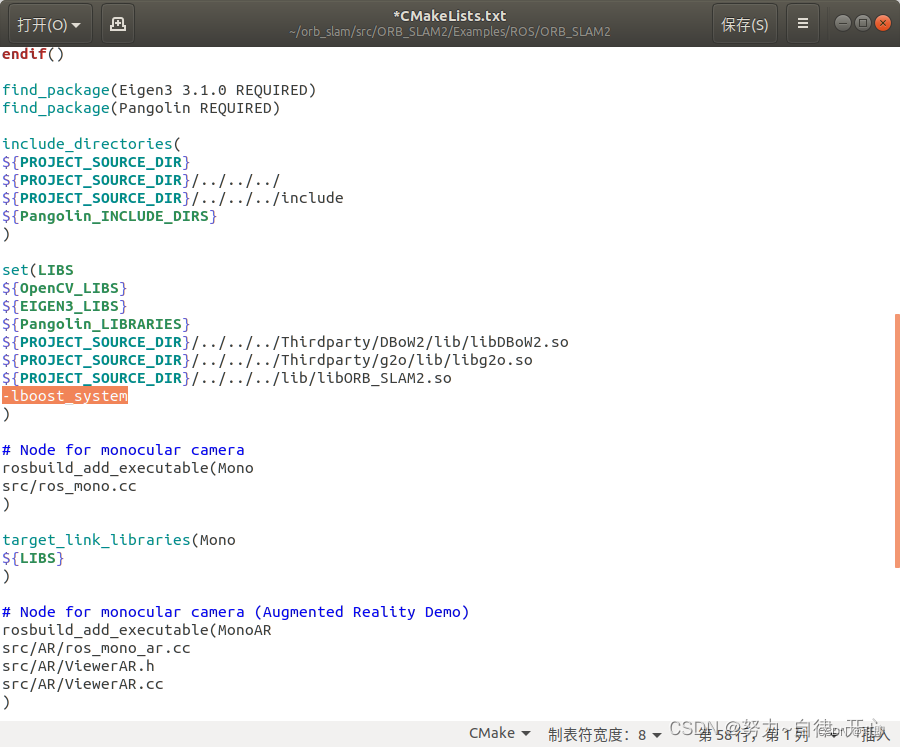
�ٴ�ִ��./build_ros.sh ��ɹ�
�����Լ���bag��
/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src,Ŀ¼��,��ros_stereo.cc����һ��,��������zed_stereo_rect.cc����������:
1.�Ľڵ�����
// Ҫ�ĵij�����Examples/ROS/ORB_SLAM2/src��
// ��Ŀ���ݼ���ros_mono.cc,˫Ŀ���ݼ���ros_stereo.cc
// ������˫ĿΪ��,���ҵ�message_filters�����н�����
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/zed2/zed_node/left/image_rect_gray2", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/zed2/zed_node/right/image_rect_gray2", 1);
2.��cmakelist
# Node for ZED camera
rosbuild_add_executable(zed_Stereo_rect
src/zed_stereo_rect.cc
)
target_link_libraries(zed_Stereo_rect
${LIBS}
)
- ���±���
./build_ros.sh
4.����
cd ORB_SLAM2/src/ORB_SLAM2
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/ORB-SLAM2/src/ORB_SLAM2/Examples/ROS
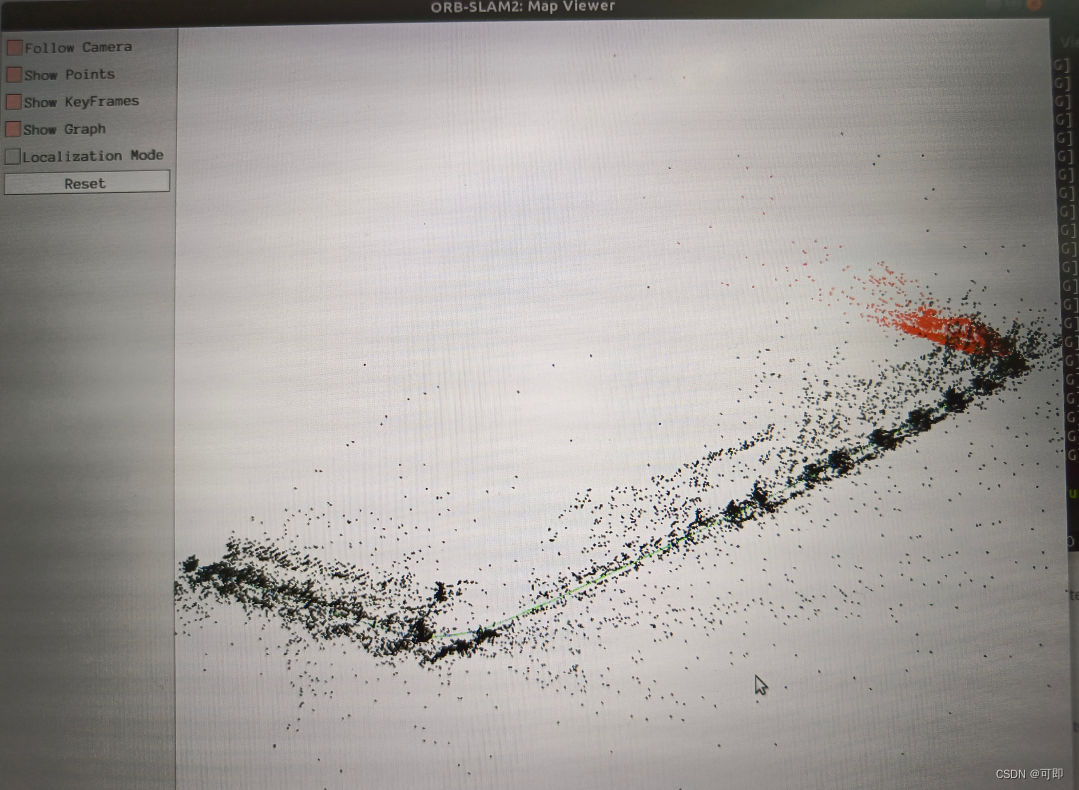
rosrun ORB_SLAM2 zed_Stereo_rect Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml false
rosbag play xxx.bag
���гɹ�,���ڽ����й۲��������,�����������λ���ļ���