ǰ�õ���������:
- vs2019
- cuda��cudnn(�鿴���Ե�cuda�汾 ����������nvcc -V)
- cmake
- opencv3.4.6���ص�ַ,�������û���������
��Ҫ���ص�����
- PaddleDetectionԴ��2.4
- PaddlePaddle C++ Ԥ��� ���ص�ַ(Ԥ���2.3����bug������,����ʹ��2.1.1Ԥ���)
- ֮ǰѵ������ɵ�����ģ��
������������
- ���Ƚ�paddledetection�е�deployĿ¼�µ�cpp�ļ��е����ó���,��·�����ӵ�cmake�е�Դ����·����
- ���ñ���������ļ��С�
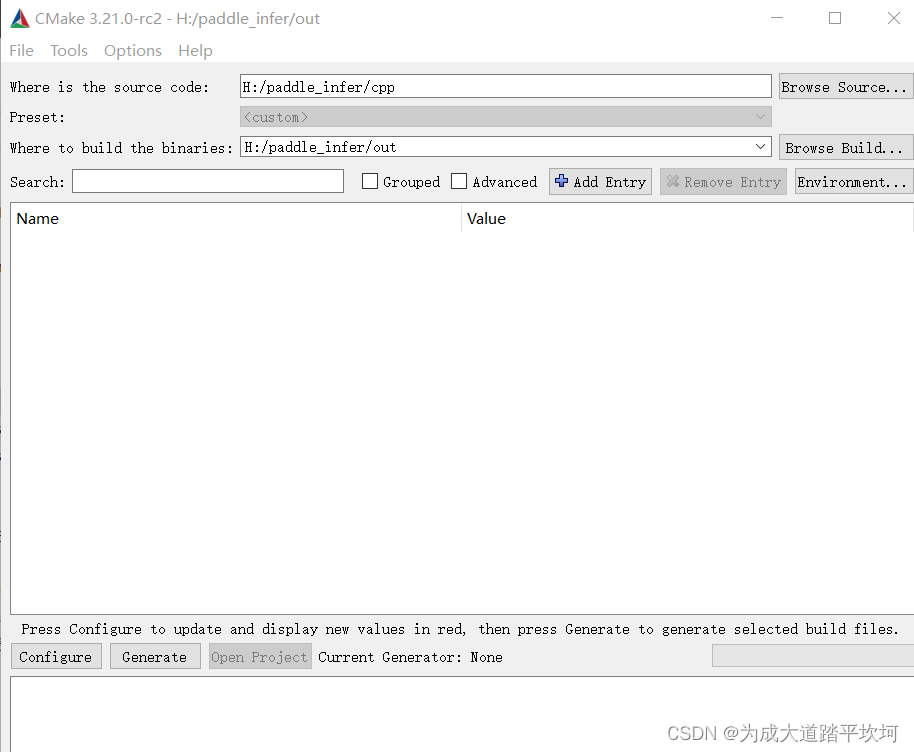
- ���configure,ѡ��vs2019��x64
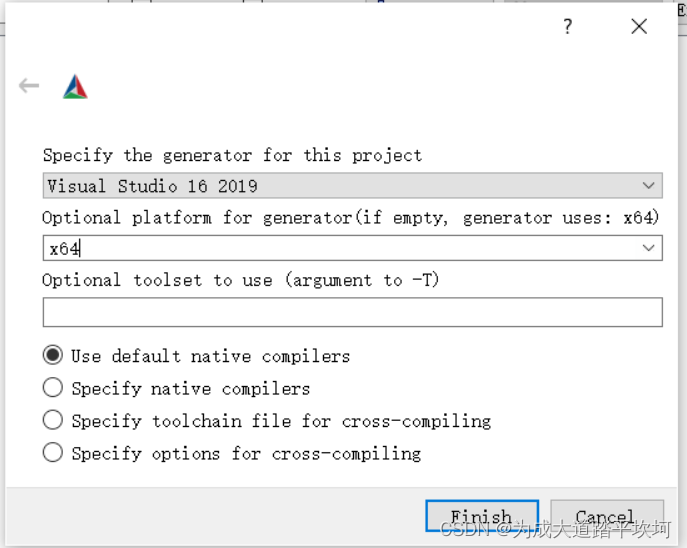
- ���finish,����������
-
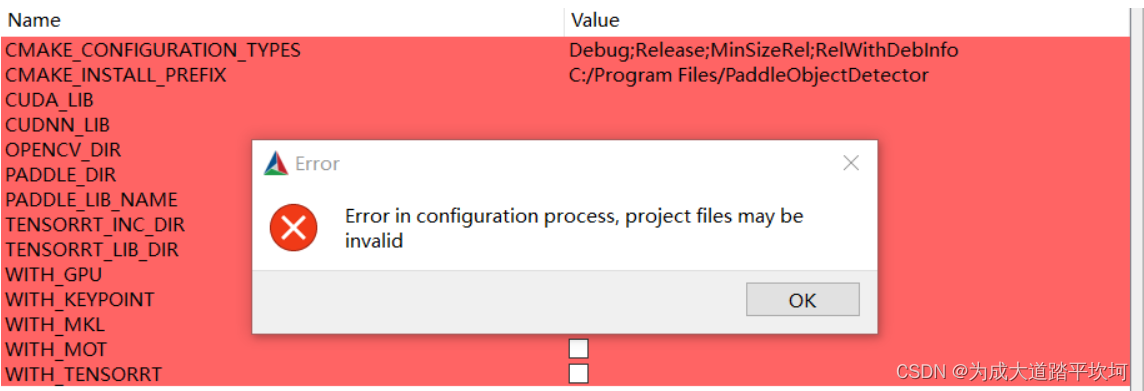
��ʼ��дcuda��cudnn��opencv��paddle�������·����
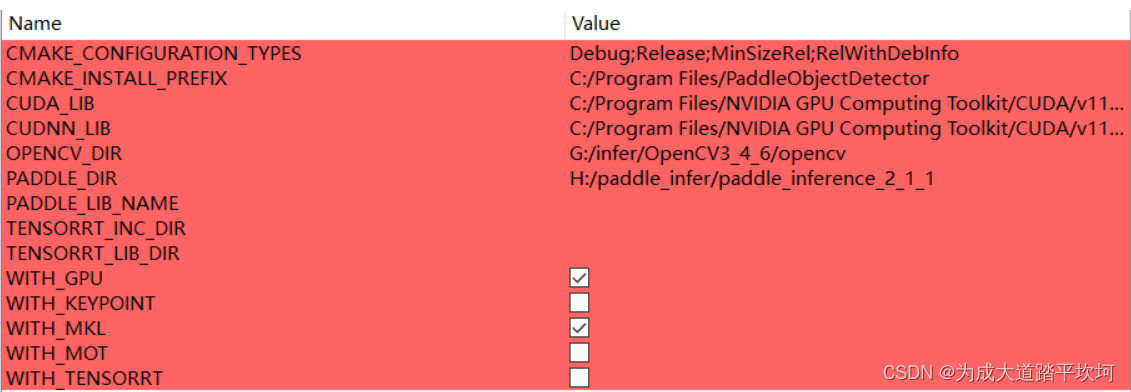
-
�ٴε��config,���������generate,������ļ���������sln��ʽ�Ľ��������
���ɽ������
- ��sln�������,��debugģʽ��ΪReleaseģʽ
- �ڽ��������,�Ҽ���main��Ŀ����Ϊ������Ŀ��
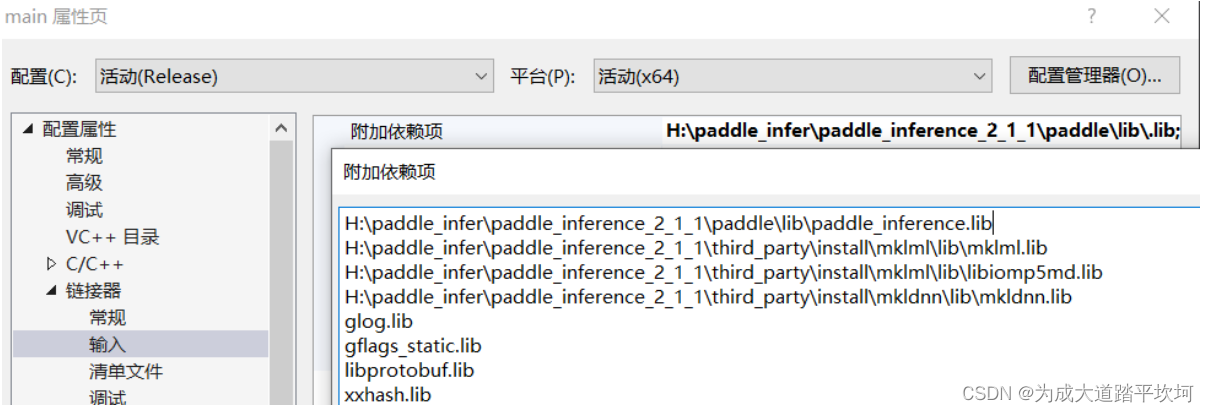
- ��main��Ŀ����,�������������е�һ�е�
.lib��Ϊpaddle_inference.lib
-
�����Ŀ�Ҽ�,�������ɡ�
-
�Ҽ�main��Ŀ,������,�����ɺ��¼���Ϊ��
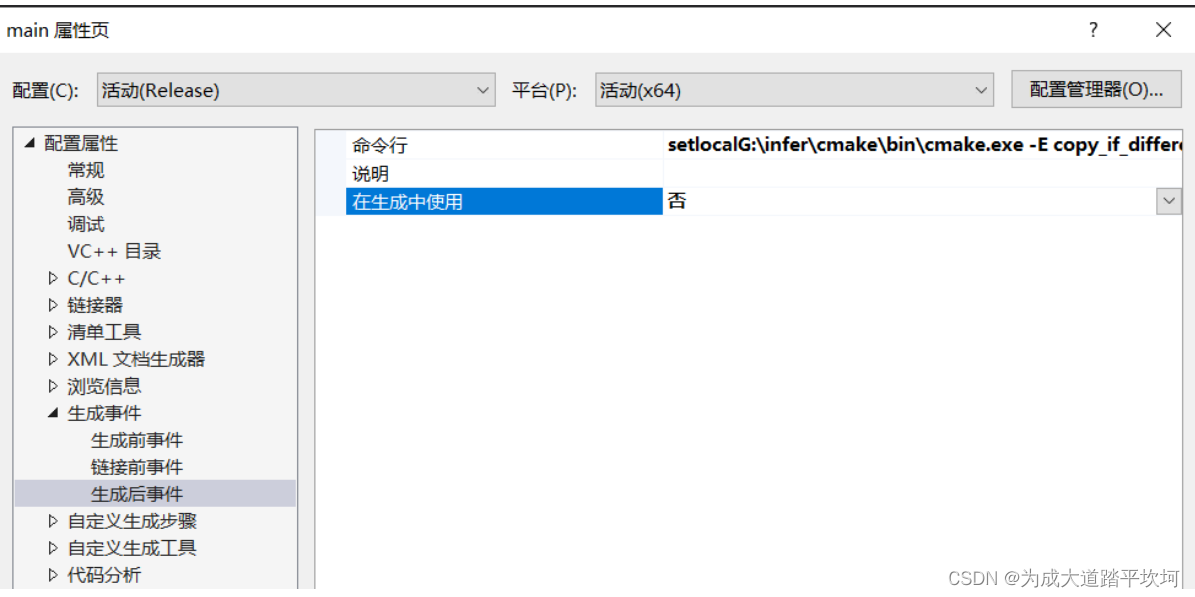
-
�ٴε����������,�����������ɳɹ���
������������
- �ҵ����Ŀ¼�е�main.exe,˫����,��ʾȱ��paddle_inference.dll��

- ��֮ǰ���ص�paddle��������paddle\lib�ļ����е�paddle_inference.dll���Ƶ����Ŀ¼�¡�
- ˫��main.exe,�ڿ�һ������,û�б���,˵����ǰ������ɡ�
����
- ��cmd�����,�л������Ŀ¼�¡�
-
��Ԥ��ͼ���ļ��к�ģ���ļ��зŵ���ǰĿ¼�¡�
-
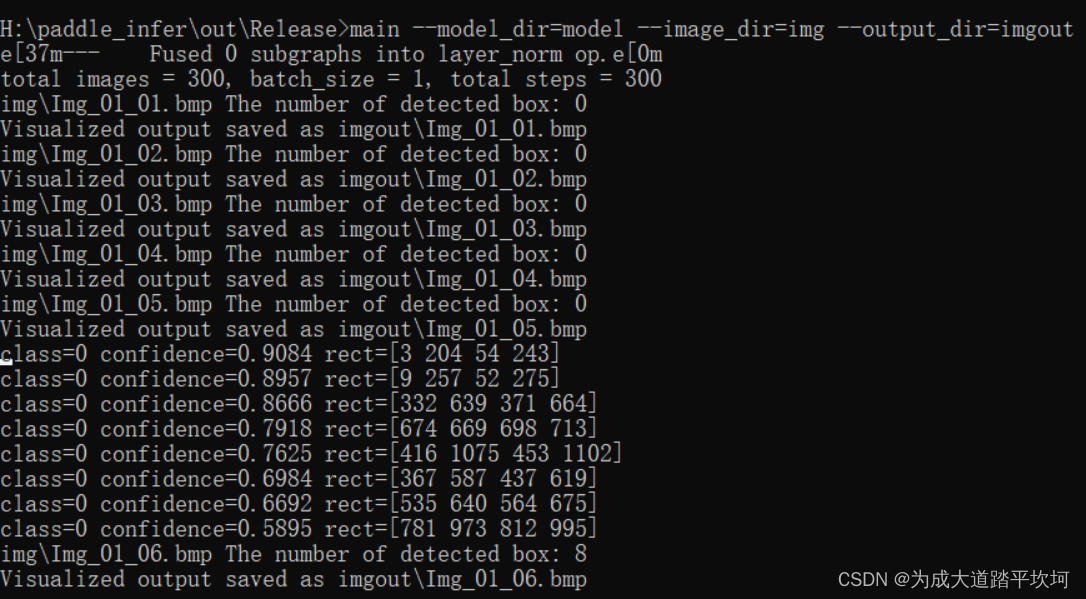
��������,��ʼ������������
main --model_dir=model --image_dir=img --output_dir=imgout
-
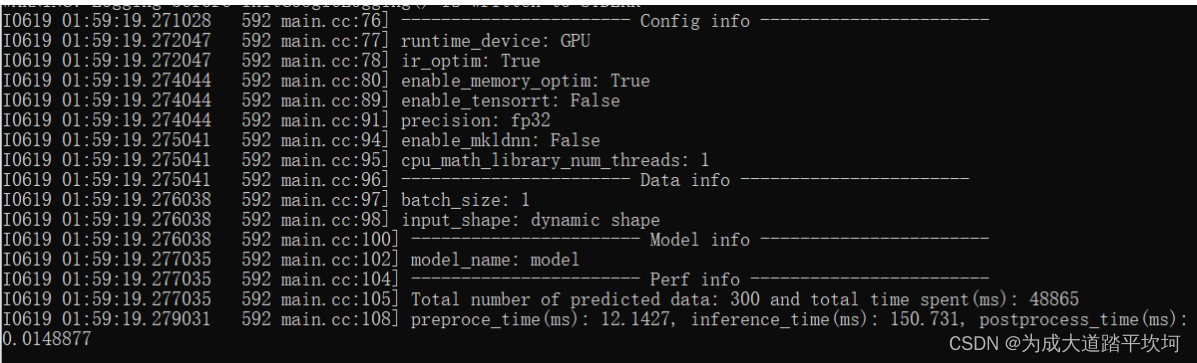
ģ����������ʼ���С�
���������:
�����ܶ����������в����ɹ�ѡ������ԡ�
��ִ���ļ�main��Ϊ������Ԥ�����,����Ҫ�������в�������:
| ���� | ˵�� |
|---|---|
| �Cmodel_dir | �����ļ��Ԥ��ģ������·�� |
| �Cthreshold | ���Ŷ���ֵ |
| �Cmodel_dir_keypoint | Option |
| �Cimage_file | ҪԤ���ͼƬ�ļ�·�� |
| �Cimage_dir | ҪԤ���ͼƬ�ļ���·�� |
| �Cvideo_file | ҪԤ�����Ƶ�ļ�·�� |
| �Ccamera_id | Option |
| �Cdevice | ����ʱ���豸,��ѡ��CPU/GPU/XPU,Ĭ��ΪCPU |
| �Cgpu_id | ָ������������GPU device id(Ĭ��ֵΪ0) |
| �Crun_mode | ʹ��GPUʱ,Ĭ��Ϊpaddle, ��ѡ(paddle/trt_fp32/trt_fp16/trt_int8) |
| �Cbatch_size | ���ģ��Ԥ��ʱ��batch size,��ָ��image_dirʱ��Ч |
| �Cbatch_size_keypoint | �ؼ���ģ��Ԥ��ʱ��batch size,Ĭ��Ϊ8 |
| �Crun_benchmark | �Ƿ��ظ�Ԥ��������benchmark���� |
| �Coutput_dir | ���ͼƬ���ڵ��ļ���, Ĭ��Ϊoutput |
| �Cuse_mkldnn | CPUԤ�����Ƿ���MKLDNN���� |
| �Ccpu_threads | ����cpu�߳���,Ĭ��Ϊ1 |
| �Cuse_dark | �ؼ���ģ�����Ԥ���Ƿ�ʹ��DarkPose����,Ĭ��Ϊtrue |
cpu����
ʹ��mkldnn���Լ�����������,Ҳ��������cpu�߳������������ٶȡ�
main --model_dir=model --image_dir=img --output_dir=output --device=CPU --run_mode=trt_int8 --use_mkldnn=true --cpu_threads=2
��ƵԤ��
main --model_dir=model --video_file=test.mp4 --device=gpu
����ͷ����
main --model_dir=model --video_file=0 --camera_id=1 --device=gpu --threshold=0.3
0��ʾ��������ͷ,1��ʾ������������ͷ��