A Generic Deep-Learning-Based Approach for Automated Surface Inspection
һ�ֻ������ѧϰ�ı����Զ���ⷽ��
//2022.6.21��ʼ�Ķ��ʼ�
���ĵ�ַ
������
���������һ��ֻ��Ҫ�������ݽ���ѵ����ASI��ⷽ�����÷�����ʵ��˼·:
- ����ͼ������������������,�����Ǵ�CNN��ת�Ƶõ���;
- Ȼ��,��ѵ���õķ�����������ͼ���ϻ�����ؼ�Ԥ��;
��������
1.����
ASI������Ϊ����:1.�ṹ;2.ͳ��;3.���ڹ�����;4.����ģ�͵ķ���;
�ṹ�����������������λ�ƽ��н�ģ�����ַ���ͨ��Ӧ�����ظ���ͼ��,���֯Ʒ[7]��֯��[8]��Ƥ��[9]�����еĽṹ��������ԭʼ����[10]����Ե����[9]���Ǽܱ�ʾ[7]����̬ѧ����[8]��[10]���ڶ��ַ����Dz�������ֵ�ֲ���ͳ�Ʒ�����ͳ�Ʒ��������������(���ש��������ľ��)�dz���Ч�����õ�ͳ�Ʒ�����������ֱ��ͼ�ķ�����11�����ֲ���Ԫģʽ(LBP)�����־���13���������ַ����ǻ��ڹ������ķ���,����������Ӧ��������ͼ�����˲����ķ����ɷ�Ϊ�ռ���14����Ƶ��15���Ϳռ�Ƶ��16������17�������,����ģ�͵ķ���ͨ����ȱ�ݵĶ�����Խ�ģ������ͼ��ı�ʾ��5������18������19����
����ASI���������,����Щ������ּ��Ϊͼ��ģ������������,ASI����������ȡ���ڱ�ʾ��ȱ�����ԵĽ�ģ�̶ȡ�����ASI��ص�����,û����ȷ������ѡ����ѱ�ʾ�����,����רҵ֪ʶ��ASI�ɹ��Ĺؼ����ṩ�����ڸ���������ͨ��ASI������һ����ս��
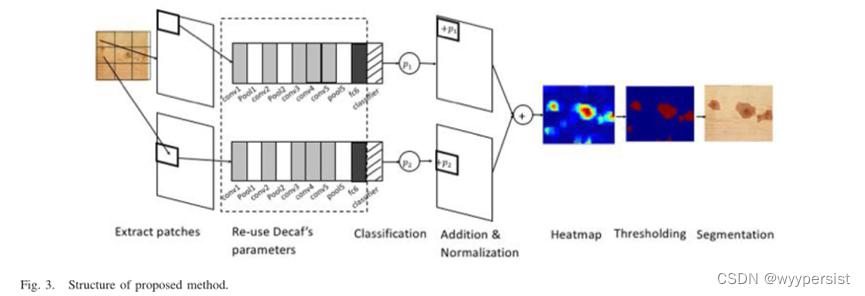
Ϊ��Ӧ����������ս,���������һ��ͨ�õ�ASI�������÷�������Ԥѵ����DL������ȡpatch����,����patch��������ȱ����ͼ,������ͼ������ֵ�ָ�,Ԥ��ȱ�����÷�������Ҫ���ģ��ѵ������,��Ϊpatch�����Ǵ�Ԥѵ��ģ������ȡ�ĸ߲��ʾ,�����κ�ѵ��������,����ķ���ͨ������ѵ���õ�patch����������ȱ����ͼ��ʶ��ȱ������ʵ��������,�÷���������С���ݼ�,��������ݲɼ��ɱ�,���Ҹ÷��������ڶ������͵ı���ȱ�����ݼ���
2.��ع���
2.1 CNN��ؽ���
����ʡ��ϸ�ڽ���,����Ȥ��ͬѧ������������CNN������ġ�
2.2 �����CNN��������
����Decaf�����CNN��֤����ͼ�����Ӧ�÷dz���Ч,��������ѵ������������ܴ�,��ʵ����û�ж����˴�ͷ��ʼ��ѵ���CNN���෴,�����о���Ա���ȶԴ��ģͼ�����ݽ������CNNѵ��,����ѵ�����Ȩ����Ϊ������ȡ����Ӧ������һ�������С���ݡ�24������25������ͨ����ͨ���Ƴ�����ѵ����CNN�������ִ�еġ�
Decaf�����Ȩ�ر�����ʹ��������������ȡ,ʹ��Decaf�������������ȡ��ʾ��ͼ���¡�
?
ʹ��fc6����б�fc7�����������,����fc6�ڴ���������б��ֵñ�fc7�á�
3.�����ͨ��ASI����
3.1patch��������ѵ��
�ڷ�����ѵ����,��ѵ����������ȡ���ͼ��顣patch�������ǻ���decf�任�����������ѵ���ġ�patch������ѵ����ϸ�����¡�
1) ������ȡ:ѵ���������ռ���CNN���ơ�����patch��СΪm��m,������СΪs���Ӵ�СΪm��N��ͼ������ȡ��patch����![]() ���������ѵ����ǩ��Ӧ���������г��ֵ�ȱ�ݡ������Ƭ��û��ȱ��,��Ƭ���Ϊ������?
���������ѵ����ǩ��Ӧ���������г��ֵ�ȱ�ݡ������Ƭ��û��ȱ��,��Ƭ���Ϊ������?
2) ������ȡ:�ռ�ѵ��patch��,ʹ�õ�2.1��������������ת������ȡpatch������ѡ���м��fc6��Ϊ������ȡ��,��Ϊ����֤���Թ㷺�ļ�����Ӿ���������Ч�ġ�23������26����
3)������ѡ��:����ѵ��������ת������,ѵ������������������ѡ��Ϊ����ʽlogistic�ع�(MLR),��Ϊ����Ȼ�ӽ�������Decaf����ε�Softmax�ع顣
?
3.2 ϸ�ֿ��
�ڶ�����ȱ�ݷָ�Ρ��ýΰ���patch��ȡ��������ȡ�������Լ���ͼ���ɺ�Ԥ�⡣
1) patch��ȡ:�ָ��ܵĵ�һ����patch��ȡ��ִ�����3.1������ͬ�Ĺ��̲�Ӧ����ͬ�IJ�����(m��n��s)��
2)2) ������ȡ:�ڶ�������ȡ��õ�patch�����������Ƶ�,���в�����������Decaf��fc6�������ʾ����������
3) ����:�ڵ�����,��ѵ���õķ������ѵ��ڴ�Decaf(conv1��fc6)�ľŲ�֮�������������ͼ���ڲ�ͬ����еĸ��ʡ�
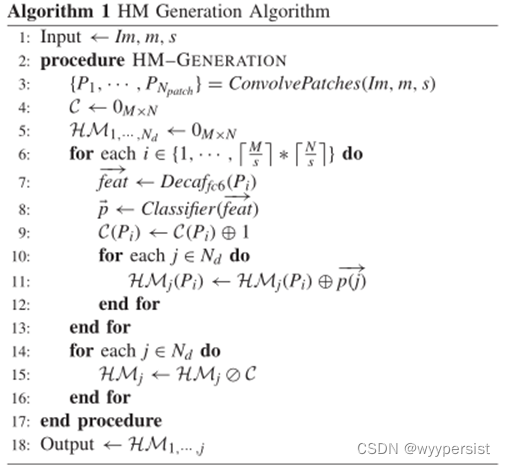
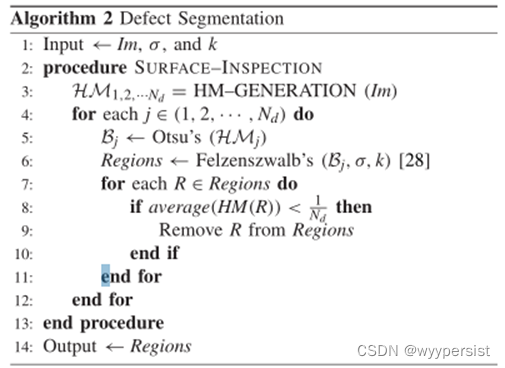
4) ��ͼ���ɺ�Ԥ��:��һ������ͼ���ɺ�ȱ��Ԥ�⡣����ȱ�����͵�����ΪNd,��i�������ķ���ΪPi,Pi�ĸ��ǵ�����Ϊ{(x{i,1},y{i,1}),(x{i,2},y{i,1}),(x{i,1},y{i,2}),(x{i,2},y{i,2}),��������Ԥ����?pi=(prob{i,1},prob{i,2},��,prob{i,Nd})������ÿ��ȱ�����,ͨ�������ص������Ӹ����������ͼ�����ڻ�ȡ��ͼ��α�������㷨1��ʾ���ڸ��㷨��,0x��y��ʾ��СΪx��y�������,�� ��ʾԪ�����,��?��ʾ��Ԫ�ػ��֡����㷨�и����˼�������C,�Թ淶����ͼ�����,��õĹ�һ����ͼ��ֵΪ0��1��
?
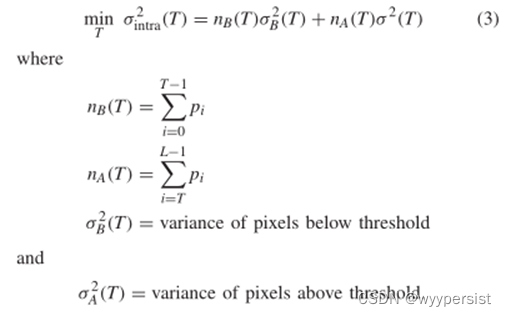
�ڻ��ÿ�������ͼ��,Ӧ��Otsu�ķ�����27�����ж�ֵ����Otsu�ķ���ͨ�������С�����ڷ���������ֵ����ͼ����ж�ֵ��������ͼ��������L�Ҷ�ֱ��ͼ��ʾ,pi�ǻҶ�i�Ĺ�һ��ֱ��ͼֵ��Otsu������Ŀ����:
?
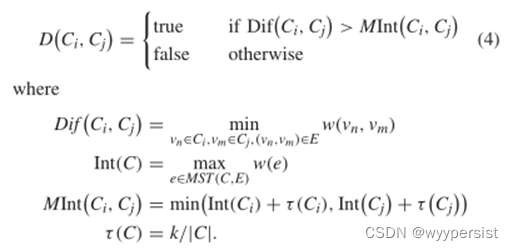
�ڻ�ö�ֵ��ͼ���,Ӧ��Felzenswalb�ķָ�[28]��ϸ��ȱ�������㷨��һ�ֻ���ͼ�εķ���,�������ص���ɫ�����Զ�����з��顣Ӧ��Felzenswalb�ָ��Ŀ���Ǵ���ֵ�������Ƴ�С�ĶϿ�����,�����Ӵ��DZ��ȱ��������G=(V,E)������ͼ,����V�����ؼ�,E�DZ�,w(vi,vj)��ʾvi��vj֮���Ȩ��,Ci��ʾ�ָ�ĵ�i��������D��ʾȷ���ֶα߽��ν�ʡ�D����ʽ��ʾ:
?
���㷨�������������ɹ�ѡ��һ���Ǧ�,�ø�˹�˲�����ͼ�����ƽ�����������ա�28���е�����,������Ϊ0.8���ڶ���������k,���ڼ�����ֵ��kֵԽ��,�ָ����ķ���Խ��
��������Ϊÿ�����͵�ȱ��������ͼ,����ڷָ���֮������һ����ֵ,���Ƴ����е�ȱ�ݸ��ʵ�Ԥ�����Ӷ��ó�����Ԥ�⡣ȱ������Ԥ�����㷨2��ʾ��
?
3.3 ����ѡ��
1) ��ͼ���ɲ���:��ͼ�������ĸ�����,������Сm��m,����s��m��ѡ��ȡ����ȱ�ݴ�С������֪ʶ������,���ȱ�ݳߴ�ԼΪ50��50,��ѡ��Ƭ�ߴ�100��100�ᵼ�²���ȷ����ͼ,����Ƭ�ߴ�5��5���ܲ�������㹻��ȱ����Ϣ�����,ѡ�������С��ȱ�ݴ�С������ͬ�����ڲ���s,��ֵ������ͼ����ȷ,��ֵ���¼���ɱ��ߡ��ڽ���Ĺ�����,s=(1 /5)m����������ʵ�顣
2) ȱ�����Ԥ�����:Ϊ��Ԥ��ȱ�����,������Otsu��ֵ����Felzenzwalb�ָ��Otsu��������ֵȷ���ǻ�������ͼ���ǿ��ȫ�Զ��ġ�Ȼ��,Felzenswalb�ķָ��������������Һ�k������ͼ��Ԥ�����θ�˹�˲��IJ�������ʼ��ѡ��Ϊ0.8,��Ϊ����[28]ȥ������ʱ,�����ᵼ��ͼ���������仯����һ������k��۲�߶��йء�kԽ��,�ָ��еķ���Խ�ò�������ȱ������ѡ���ݡ�28��,����20��20���ҵ�ȱ�ݳߴ�,k=200;����50��50���ҵ�ȱ�ݳߴ�,k=500,�������ơ�
4.��������
Ϊ����֤������ķ����Ƿ�����ƹ�,��ʵ��ѡ���˾��в�ͬ�����Ĺ㷺���档���ݼ��������������ϵ�����ȱ�ݡ�29��,X����ͼ���Ͻ����ܵı���ȱ��,ľ����ɫ������ȱ�ݡ�3��,�ѺϽ��۽ṹȱ�ݡ���Щ���ݼ���������ȱ�ݡ���ɫȱ�ݺ��۽ṹȱ�ݡ���Щ���ݼ�����ϸ��Ϣ�������¡�
4.1 NEU����ȱ�����ݿ�
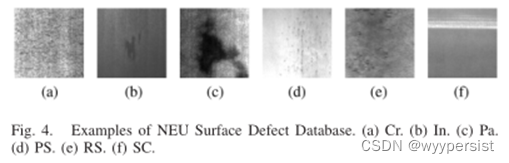
��һ���������ݿ���NEU����ȱ��[29]�������ݿ�����������ֵ����ֱ���ȱ�ݡ�ȱ�ݰ�������(Cr)��������(In)��·��(Pa)�����ӱ���(PS)��������Ƭ(RS)�ͻ���(SC)��ÿ��ȱ����300����Ʒ��ȱ��ͼ���ʾ����ͼ4��ʾ�����ݿ��и���������ͼ��ı�ǩ,��δ�ṩȱ�������ground-truth��
?
4.2����ȱ�����ݿ�
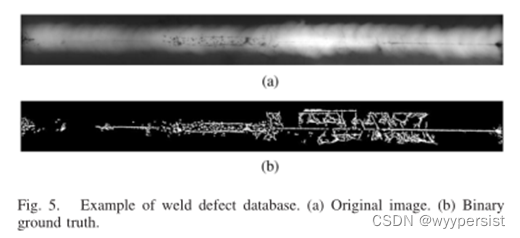
�ڶ����������ݼ�����GDX����ͼ��30���������ݼ����������X����ͼ��,�����������졢��װ����Ȼ�����á�����ʹ�õ����ݼ��Ǻ���,��Ϊ������������,���������ݼ�����ء��������ݼ����������ܵ���������Ƭ�����ݿ����ṩ��10�����������ص�����ʵ�ȵ�ͼ��ͼ���ʾ����ͼ5��ʾ��
?
4.3 ľ��ȱ�����ݿ�
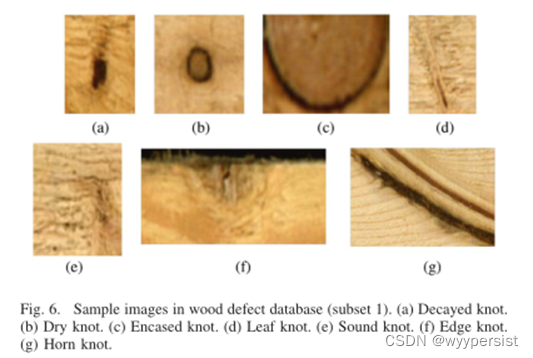
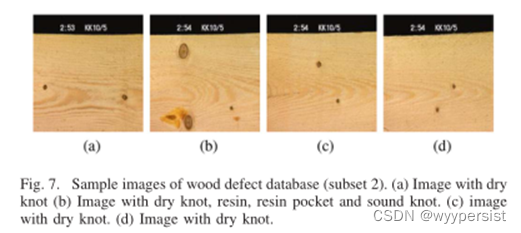
ʵ���о��е����һ���������ݿ���ľ��ASI��ľ��ȱ�����ݿ�[3]�����ݿ����������Ӽ���һ�����ֶ����ȱ��ͼ��,���а�����ͬ���͵�ľ�ڡ����Ӽ��ṩ���������͵Ľ�ȱ�ݵ�438��ͼ��ʾ��ͼ����ͼ6��ʾ�������ݿ����һ���Ӽ���ľ��ͼ��,���е�����ʵֵ�ɱ߽���ṩ���ṩ��839�ŵ�·��ͼ��,����18�����͵�ȱ�ݡ�һЩʾ����ͼ7��ʾ��
?
?
4.4 �۽ṹȱ�����ݼ�
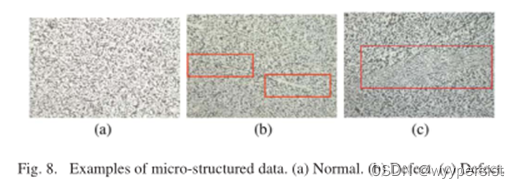
���һ�����ݼ�����˹��˹�Ĺ�ҵ���ݼ���ͼ��ɼ����ѺϽ����ҶƬ,ͼ��ߴ�Ϊ1944��2580��ѵ��������49��ȱ��ͼ���10������ͼ���Լ�����ʮ��ȱ��ͼ���ʮ������ͼ��ʹ�ñ߽����ȱ������һЩʾ����ͼ8��ʾ��
?
5.ʵ����
������ʾ��ʵ�������������������֡���һ�������������������,���ж�ȱ��ͼ����з��ࡣ�ڶ������Ƕ�����ķָ��ܽ���������
���ڷ�����,�����й������ݼ���Ӧ��������ͨ�õ�����������ȡ�������л�����,����ֱ��ʾֲ���ֵģʽ(MLBP)[31]�ͻҶȹ�������(GLCM)[32]��Ϊ��Щ����ѡ��IJ������ϡ�12���͡�31��������MLBP,ͼ�������ǻҶ���ת����ֲ���ֵģʽ����ת���䷽���ȵ����Ϸֲ���
��������[31],���������Ͱ뾶���������������,��{(8,1),(16,2),(24,3)}���÷����ѱ�֤���ڹ㷺���������ݼ��ϱ������á����,ѡ������Ϊ������������GLCM,ѡ��ĽǶ�Ϊ{0?, 45?, 90?, 135?} ���뼯��{1,2,4,8,16}�����������ǽǶ��ء�����־ء��ء�����ԡ��ԱȶȺ���������ϡ�33����
���˳�������������,��ѡ������Ե������ݼ������Ƚ����ֹ�������Ϊ��������Ϊ�˽�ת�������������뵥����Ƶ��㷨���бȽϡ�
���ڷָ�����,��һЩ���������ݼ���ASI������������Ŀ�ܽ��бȽϡ�
5.1 ��������������
????????ѡ��Ԥѵ��DL�����е�������Ϊͼ���ʾ�����ڵ��Ľ����������������ݼ����������ķ������ܡ��������ݼ�������˵��,�����б���ľ��Ⱦ������屶������֤��
���ڵ������ݼ�,������һЩ�ض������ݼ���������ȡ�ͷ�������÷������������ж�����Ȼ��ʧ���ݶ�boost��������֧��������(SVM)��logistic�ع�(LR)��MLR��ÿ�����Խΰ���20������,������ƽ�����ȡ�
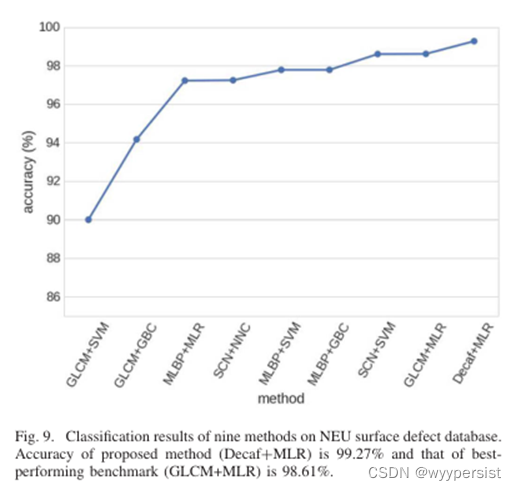
1) NEU����ȱ�����ݿ������:����NEU����ȱ�����ݿ�,ѡ������ͼ�������patch����������������Ϊ��Щͼ���Ѿ��Ŵ�patch��������ͳ������������ȡ������MLBP��GLCM������������[34]��,ɢ����������ڸ����ݼ��ϱ�֤������Ч�ġ����,ѡ������Ϊ������,����SVM������ڷ������߱�ʹ�á����Լ���ѡ����[34]�������ķ�����ͬ,����ÿ��������ѡ��150��ͼ�����ͼ9��ʾ���������,����������������л�����,ȷ��Ϊ99.21%��
?
2) ����ȱ�����ݿ��еIJ�Ƭ����:����GDX�������ݼ��еĺ���ͼ��,��Ϊÿ��ͼ���ṩ������ʵֵ��Ϊ�˲���ͼ������������,������25��25��50��50��75��75��patch��С��Ϊÿ��ͼ��ѡ��200����ȱ������IJ�����200��ȱ������IJ�������Ƭ����Сȱ�ݳߴ�ѡ��Ϊ100����,��Ϊȱ������Ӧ���к����Ĵ�С����ȡȱ����Ϣ��ѡ�����ͼ��������patch����Щ��Ƭͨ���屶������֤���������������ͼ10��ʾ��
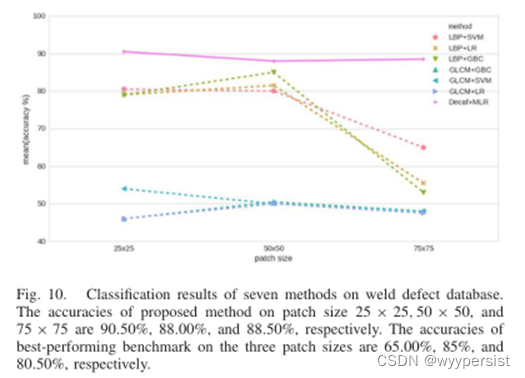
?
�������,������������patch�ߴ�,ת��������������á�MLBP�ڷ���������Ҳ�������á�Ȼ��,����������ݼ�,GLCM����������²�(50%)�ö��١�
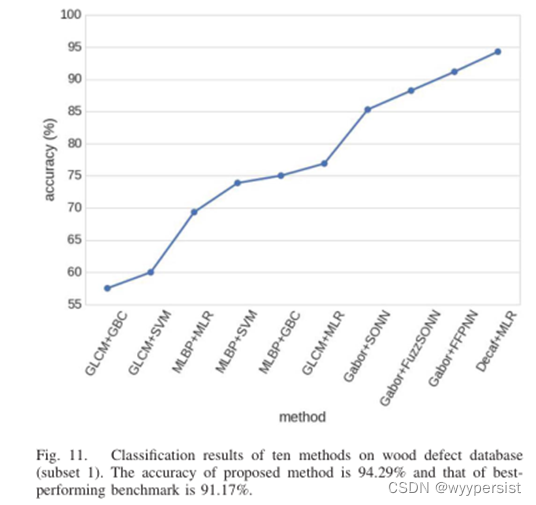
3) ľ��ȱ�����ݿ����:ľ��ȱ�����ݼ���ת���������������ڵ�һ���Ӽ����÷�����[35]�����˱Ƚ�,������֤����Ҳ��ѭ��[35]�������ķ���������[35]�е�ͼ��������Gabor�˲���,��������������֯�������ǰ����֪��������(FFPNN)���������б����ȱ�����Ͱ�������ȱ�ݡ�Ҷ״ȱ�ݡ���Եȱ�ݺ�����ȱ�ݡ�
�����ͼ11��ʾ�������з�����,ת�������ľ�����ߡ�������һ����������(MLBP��GLCM)���ֹ������(Gabor��������FFPNN)��
��������������������,ת�Ƶ������DZ�ʵ���������ĸ���ʾ�����ںܴ�̶������ڴ�ͳ�����������ֹ�������������
?5.2 ȱ�ݷָ�����
????????����������,��ת�Ƶ������ڶ�����ݼ��Ͼ��нϸߵ����ܡ��㷨1��2�������ķָ��Ҳ����Щ���ݼ��Ͻ���ʵ�֡����ڵ������ݼ�,���ÿ��������ض����ݼ����ֹ��ָ�����бȽϡ�����NEU����ȱ�����ݼ���û�л�����ʵ��,��˽���������ȱ�ݡ�ľ��ȱ�ݺ��۽ṹȱ�����ݼ����зָ
1) ľ��ȱ�����ݼ��ķָ���:����ľ��ȱ�����ݿ��а��ͼ����Ӽ�2,patch��Сѡ��Ϊ50��50���ֶβ���ѡ��Ϊ��=0.8��k=500��
�����ݼ����ṩ�Ļ�����ʵ�������ؼ��ġ����������ĸ����궨��ı߽�����,��Ч������ѭ��3���͡�36���е�������ʹ�õ��������ȱ�ݼ��(D)�ʡ���������(E)�ʡ���(F)�ʡ��������(M)��ȷ��(A)��������Щָ���������Ϣ������ʾ��
- Ndet:����ģ�����ɵļ�������
- Nlab:��ʵȱ�ݵ�������
- Ndet_lab:����ģ�ͼ�����ʵȱ��������
- N:ѡ������������ͼ��Ƭ����(����ȱ�ݲ�Ƭ��������Ƭ)��
������������,Ndet_lab��Nlab��Ndet�Ľ���㡣��������е�ͼS-4��ʾ����Щ����֮��Ĺ�ϵ��
ȱ�ݼ�����Ǽ���ģ�ͼ���ʵ��ȱ�ݵı���,������ʾ:
?
�����������Ǽ���ģ����©��ȱ�ݱ���,������ʾ:
E=1-D
�����������ϵͳ�����ļ�������ı��ʱ�ʾ,������ʾ:
?
����������Ǵ��������߿������ı���,����ȱ�ݺͷ�ȱ������,������ʾ:

?
ȷ������ȷ�����patch�ٷֱ�,��������:
A=1-M
������ASI��������,��Ҫ�ʹ�������(E)������(F)����δ������(M)�߾���(a)��
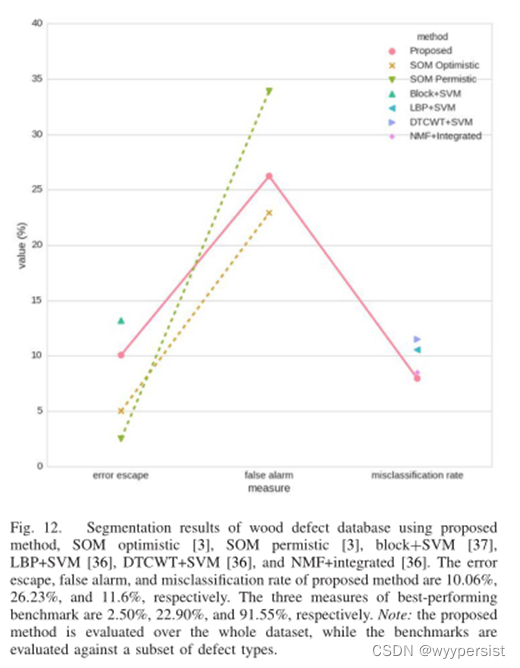
��������ķ�������ѻ������˱Ƚϡ�3������36������37������[3]��,��ɫ�ٷ�λ����LBP������������ÿ��ͼ���Ϊ��,������Щͼ���Ӧ������֯ӳ��(SOM)���ֶ�����ȱ�ݿ�ͷ�ȱ�ݿ�֮�����ֵ������[3]����������ѡ����ֵ�ķ���,���ֹ���ֵ���͵�����ֵ�������ʮ�����͵�ȱ�ݱ�����[3]�Ĵ�������(E)rate�ʹ���(F)rate����[37]��,ÿ��ͼ�����Ƶر�����Ϊ�顣ͼ�������ǰٷ�λ��ɫֱ��ͼ����������������������������ѵ��֧��������������,������ȱ�ݺͷ�ȱ����������������͵�ȱ�ݱ�����[37]�еĴ�������(E)����[36]��,��ͼ��Ӧ���˷Ǹ�����ֽ�(NMF)����˫����С���任(DTCWT)��LBP������������ȡ���顣����[36]�Ĵ������(M)�������������͵�ȱ�ݡ�
����������ķ���,������18��ȱ�����͵����ܽ����������������ͼ12�C14��ʾ�� ͼ��,δ��[3]��[36]��[37]�о���ȱ�ݱ��Ϊȱʧ���ݡ���ͼ12���Կ���,����ķ���������E��F��M����ı��ֲ�����������������Ȼ��,��������ķ�����������ȱ�����͵��������ڻ���������������δ������ijЩ����ȱ�ݻᵼ�½ϴ��E��F(M����)�����,�Ƚϼ��ÿ��ȱ�����͵�������һ����ƽ�ı�,�������������ܡ�
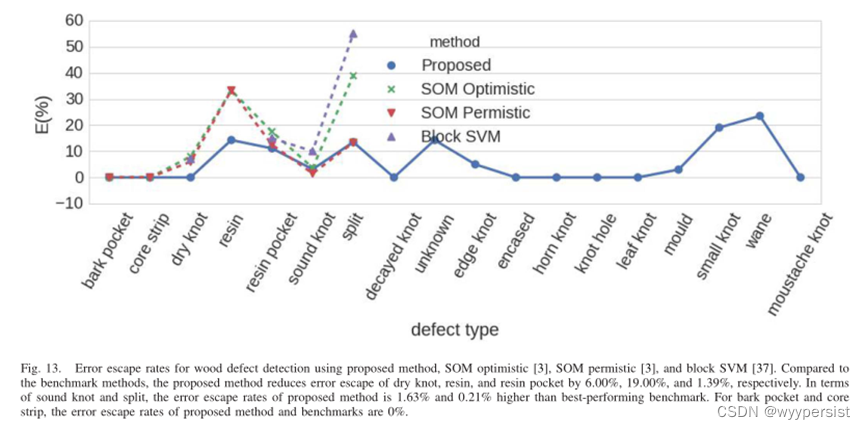
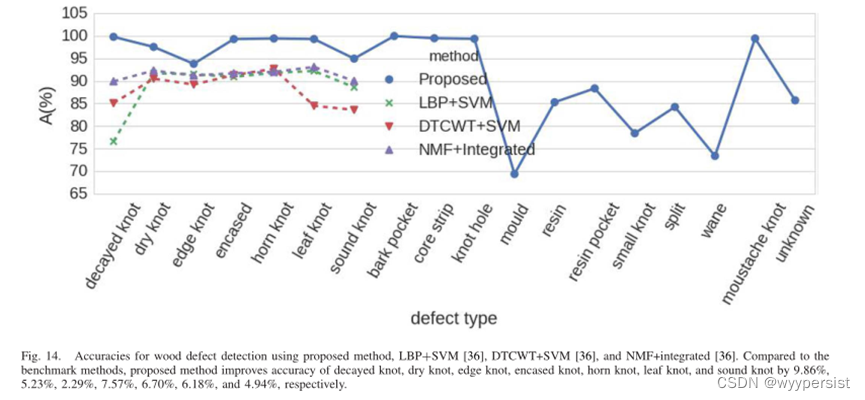
ͼ13��14��ʾ���ÿ��ȱ�����͵Ľ��鷽���ͻ�������E��A����������е�ͼS-1�������㷨������Ԥ��ʾ����������Щ�м����,��ͼ��ʾ�����쳣�Ŀ�����,Otsu����ֵ������ͼת��Ϊ��ֵͼ��,Felzenswalb�ķָ�ȥ��������ϸ��ȱ������ͼ13���Կ���,������ķ����Ĵ��������������·������Ե��ڻ�����,��ȱ������Ϊ�ɽᡢ��֬����֬���ϡ��ڼ��������ͷ��ѷ���,������������õ��㷨��Ȼ��,����������,���ܽ������½������ڽ�ȫ�Ľڵ�ȱ��,������ķ�����EΪ3.13%,��������ܻ���EΪ1.5%�����ڷ���ȱ��,����13.51%,������13.3%����ͼ14��,������������ȱ������,������ķ�������[36]�е����ַ�����
2) ����ȱ�����ݿ�ķָ�:���ں���ȱ�����ݿ�,�����ָ�Ϊ���ѵ��ͼ����������ͼ����ÿ��ѵ��ͼ��,ѡ��100��ȱ�ݺ�100����ȱ��patch��ѵ��patch����������Ȼpatch��С25��25�Ƿ��ྫ����ߵ�patch,����ȱ�ݷָ�������ѡ����patch��С75��75��25��25����İ߿�����75��75��9�������,ѡ��75��75patch���Դ����ټ�����,��������ʧ̫�ྫ�ȡ����ڷָ��,����ȱ�ݴ�С,��ѡ��Ϊ0.8,kѡ��Ϊ200��V alavanis��Kosmopoulos��38����ѡΪ��������������ͨ��ִ��Sauvola�ֲ���ֵ�ָ�[39]��Felzenswalb�ָ�[28]���ָ�ȱ����������,�����ݼ��������ͻ���ǿ�ȵ���������ȱ�ݽ��з��ࡾ38����
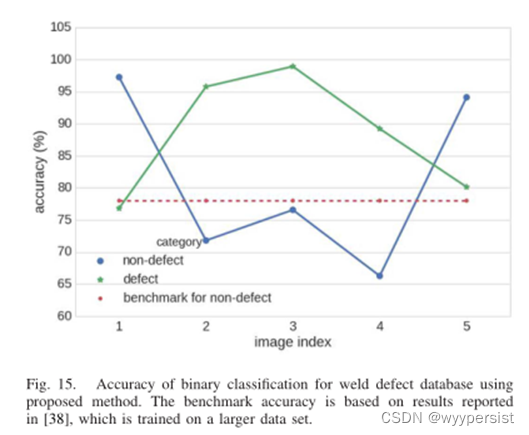
��[38]��,�����˼������͵�ȱ�ݽ���������Ȼ��,���ǵ�ʵ�鲢û��Ϊ����ȱ�����ݼ��ṩȱ�����͵���Ϣ������,����[38]�е����ݼ�����24��������Ƭ,�������ǵ�ʵ����ֻ��10��ͼ�����,������ķ�����ֱ����[38]���бȽϡ�Ȼ��,����[38]�еĽ����ʾ��Ԥ��ȱ�ݺͷ�ȱ�����ص�ȷ��,����ζ�Ÿ÷��������ܡ�[38]�еĽ������,�Է�ȱ�����صķ���ȷ��Ϊ78%��ͼ15��ʾ��ʹ������������Ľ�������ͼ��Ķ�ֵ���ྫ����66.27%~97.26%֮�䡣��Ȼ���ݼ���С,��������ķ�����������������[38]�б���Ľ���൱��
?
��������е�ͼS-3��ʾ��ʹ�������������Ԥ����ʾ�����������,��ͼ�еĸ�ǿ��������ȱ��������,���ڹܵ��߽��ԭ��,�����ܴ�ͨ��Ӧ��Otsu����,����ǿ����������Ϊ1,��ǿ������Ϊ0��ͨ���ָ��㷨,ȥ����������С�������,���������Ԥ�⡣
 ?
?
?
3) �۽ṹ���ݼ��ķָ���:�÷���ҲӦ���ڹ�ҵ�۽ṹ���ݼ����۽ṹ���ݵ�����ASI����ͨ�������ڹ���ģʽ��40������41����Ȼ��,��Щͼ�������������ġ���ASI����,�й��ѷ���ҶƬ����֯ͼ��������١����,�����ݼ���������������
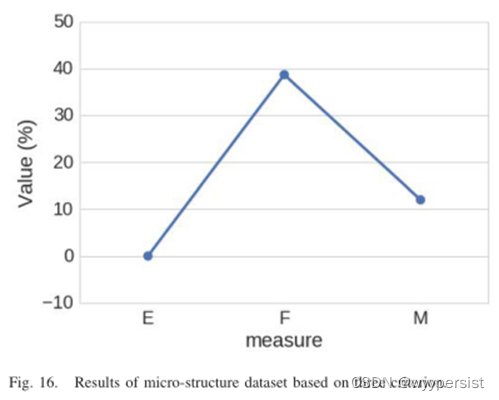
????????������Щ�۽ṹͼ��,����ʦ�Ƕ�ͻ����ʾȱ������ܸ���Ȥ,�����Աȼ����Ը���ȡ��ѡ����Խϴ��patch(256��256)�Լӿ����ٶ�,��Ϊ����Ҫ��ȷ�����ط��ࡣ�����ݼ��ı�ǩ������ľ��ȱ���Ӽ�2�����,����ʹ��������(2)�C(6)����������еĽ����ͼ16��ʾ,���ʾ����ͼS-2��ʾ��
????????�������,�÷�����������������ʺ��Ըߵ��龯�ʡ���ʵ��,�������Զ����ṹȱ�ݼ���ǿ�ȡ�ġ����ڷ���ҶƬ��δ����ȱ�ݿ��ܻᵼ�����صİ�ȫ����,���,�ijɱ����DZ��ijɱ��ߵöࡣʵ��������,�÷����Ǹ��ṹ���ݼ�ASI�����ú�ѡ������
�ӷ���ͷָ������ʵ��������,�÷������ڽ�С��ѵ����������Ч�ġ����ڸ÷�������Ҫ������ѵ������,ֻ���Ż������IJ���,������Ҫ��������CNN,���ͨ��Ӧ������ת��,���������ݲɼ���ģ��ѵ���ijɱ�������,�÷���������ͨ����,��Ϊ��Decaf����ȡ��������patch�ĸ���ʾ,���������ݼ��ء�
6.ʵʩϸ��
�ÿ���ھ���24�˺�32GB�ڴ�Ĺ���վ��ʵ�֡�ͼ17��ʾ������������ȡ������patch��Сx��x�ļ���ʱ�䡣����LBP�ķ������������ؼ�����,����ɱ�����patch��С�����Ӷ��������ӡ�ת�������ļ���ɱ���patch��С��,��ΪDECF���ǽ�����ͼ��Ĵ�С�������ض��ijߴ硣����Ԥѵ������������,������ȡ�ļ���ɱ����ڻ���LBP��GLCM��Сpatch������Ϊ�˼ӿ�÷������ٶ�,����ʵ����������ȡ���衣���ھ���2000��patch��ͼ���ȱ�ݷָ�,ƽ����Ҫ2���Ӳ���������ͼ��
��Щ�㷨��ʹ��Pythonʵ�ֵġ���ʵ�����漰������������Scikit Learn��2 Numpy��3 Scipy��4 Scikit Image��5��Decaf��6.Decaf��Ԥѵ�������ǹ����ġ�
7.����
��ʵ��������,������������ͼ��,����������������ֹ�����������������,�������ASI������ȱ�ݷָ��Ҳ�������á�����̽������˸�Ч��ԭ��
7.1 ���������
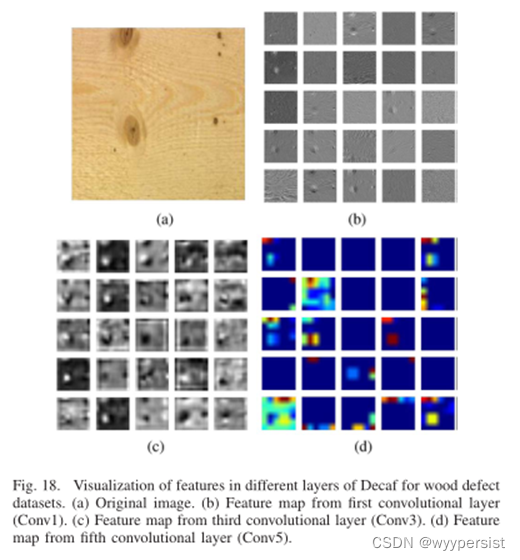
�ӵ���ڵķ���������,ת�������DZ��������ݼ��ĸ�������ʾ����������Ŀ��ʶ������ĸ����ԡ��ڶ���ʶ����,�������͵���Ϣ�DZز����ٵ�,������������״��CNNͨ�����Ĵ���ѧϰ��ͬ����ı�ʾ��ͼ18��ʾ��Decaf��ľ��ȱ���л�ȡ����Ϣ����ʾ�����Ͳ�������ͼ��ı�Ե������,������Ϊȱ�����ɸ�����������ӳ�䡣��ʾ������,DECF��ASI�����Ӧ�Ժ�ǿ��
?
7.2 �ָ��
���ڷָ�����,�������,�÷������нϸߵ�����,�����ڸ������ݼ��Ͼ���ͨ���ԡ��÷�����������Ҫ�ŵ㡣����,��������С���ݼ��Ͻ���ѵ��,���ҿ��Էdz���ȷ�����ں���ȱ�ݵķָ�,��Ȼֻ�����ѵ��ͼ��,���÷����Ľ����Ȼ�����еķ����൱��������˸÷�����Сѵ�����ݵĴ�����������Ϊ��ҵӦ�ý�ʡ�������ɱ�,��Ϊ�����Ŀ�Ӽ�鶼��Ҫ�������ֶ��������ռ��ͱ��ͼ�����,�÷��������ڲ�ͬ��������ݼ�֮��ʵ�֡���ͳ��,ASI����ȡ����ȱ�ݵ�����,�����ߴ硢��������ɫ�����,���������ASI�������������ֹ�����������,����Щ������Ӧ���ڸ��ָ��������档�ÿ����ȫ�Զ���,��ȱ�����Եı仯����³���ԡ�
8.����
���������һ��ͨ�õĻ���DL��ASI�������÷�������Ԥѵ��DL���������ת����patch������������ͼ��ľ������ڷ���������,ת�Ƶ��������������ֹ��������������������ݼ���ȷ����߷�ΧΪ0.66%~25.50%�����ڷָ�����,�÷�������������ȱ�����͵Ĵ��������ʴ�6.00%-19.00%,����ȱ�����͵�ȷ�������2.29%-9.86%,�۽ṹ���ݼ��Ĵ���������Ϊ0.0%��
��δ��,���ǽ���ע�����о�����һ�������Ǽӿ���ͼ���ɹ���,��ʵ��ʵʱȱ�ݶ�λ���ڶ���������ʹ�û���ѧϰ�����Զ�����Ƭ��Сѡ����̡�