M2DGR: 多源多场景 地面机器人SLAM数据集
Paper:https://arxiv.org/pdf/2112.13659.pdf
出处:ICRA2022 & RAL2021
项目地址:https://github.com/SJTU-ViSYS/M2DGR
主讲人:M2DGR一作上交硕士殷杰,导师邹丹平教授;
ICRA官方分享:https://www.bilibili.com/video/BV1q3411G7iF
Paper Literature Review:暂空缺;
Notes
大纲:
- 1.多源SLAM发展现状
- 2.主流SLAM数据集回顾
- 3.M2DGR采集平台与环境
- 4.实验评估与结果分析
- 5.数据集使用指南
1 多源SLAM发展现状
主要内容包括:视觉SLAM、激光SLAM、多源融合;
其中:多源融合的SLAM方法可以有效的提高SLAM的精度和鲁棒性,是目前最热门的领域之一;
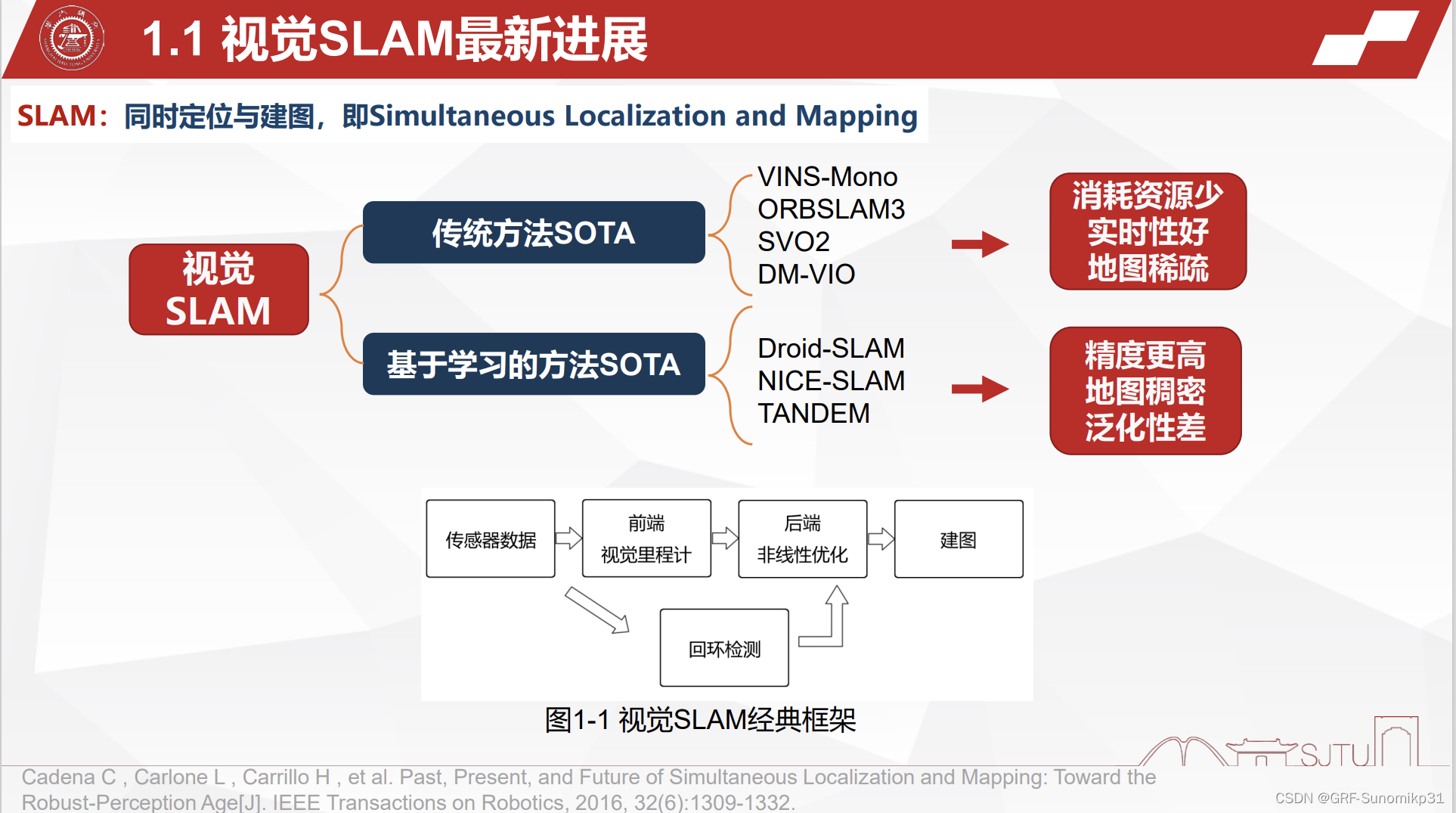
VSLAM主要分为以上四个模块;主要分为传统的方法和基于学习的方法;目前学术界会认为ORB-SLAM3的性能比VINS-Mono更好,这是在TUM-VI和EuRoC两个数据集上得出的结论,但是主讲人经过实验验证上发现:在小车以及真车上面,VINS-Mono性能会更稳定,也会更好一些,ORB-SLAM3在这样的平台上容易跟踪失败;如果是在小规模或者是由大量回环的情况下,ORB-SLAM3是可以达到分米级别,甚至是厘米级别的精度。SVO2相比与SVO,增加了多目的支持、后端优化以及回环检测,性能可以媲美ORB-SLAM3;DM-VIO是最新的一个工作。是一个延迟边缘化的系统,性能也可以媲美ORB-SLAM3;上面几个算法在不同数据集上各有优劣,都可以视为SOTA 算法;
基于学习的SLAM系统中,Droid-slam是所有SLAM中定位精度最高,其在TUM-RGBDI和EuRoC上的性能远超ORB-SLAM3,它在所有的序列上都能达到厘米级的精度,其缺点在于非常消耗计算资源,需要两块3090才能实时运行;NICE-SLAM是浙大的面向SLAM的动态神经隐式可缩放编码,神经隐式比较适合渲染稠密几何体(比如IMAP,但是Imap很难处理大型场景,NICE-SLAM可以处理大场景);TANDEM展现了不错的实时三维重建性能。
总结:传统方法消耗的资源比较少,但是构建的地图相对稀疏;基于学习的方法精度会更好,地图也很更加稠密,但是泛化能力差。
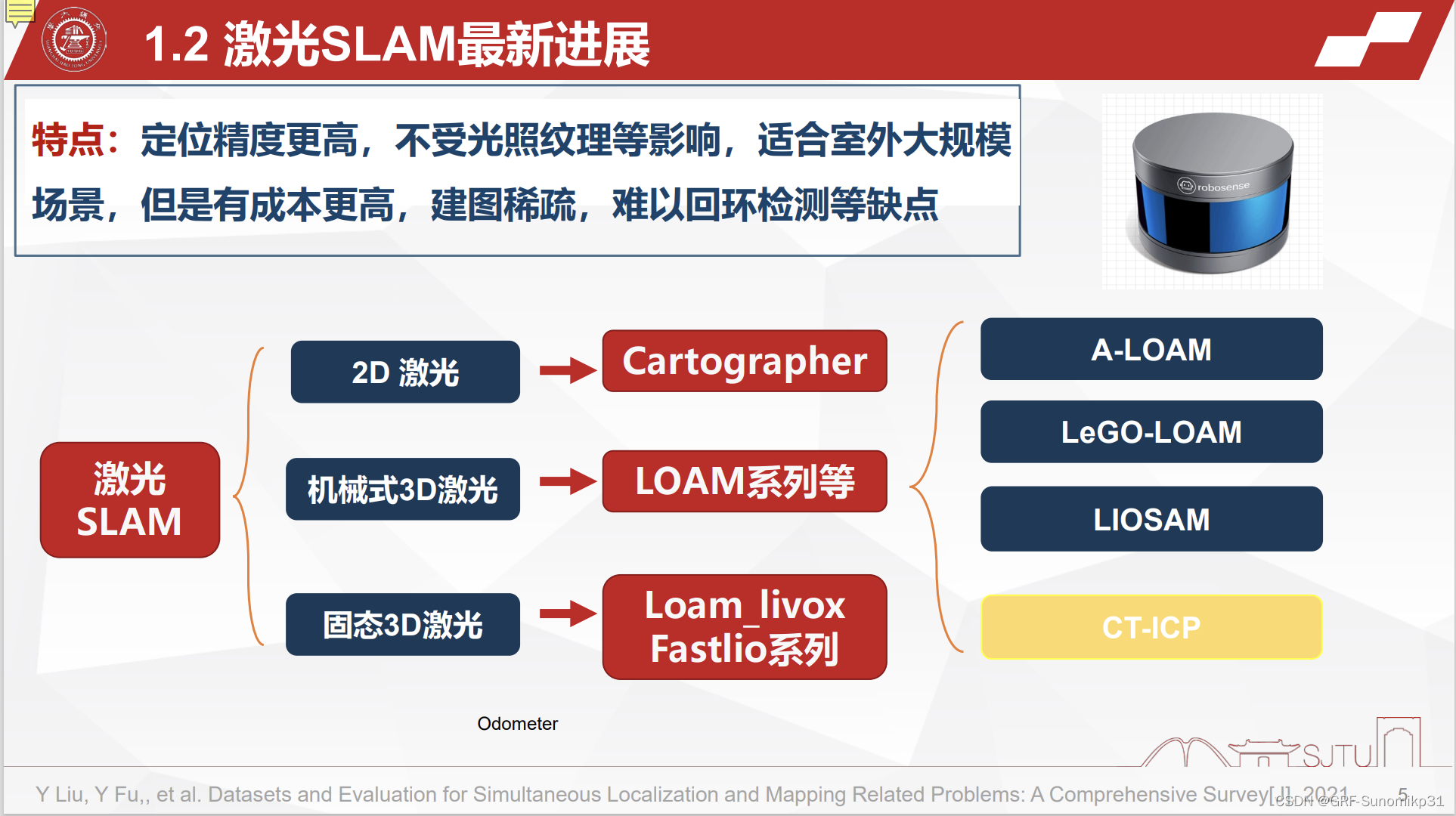
视觉SLAM对于光照和纹理信息比较敏感,但是激光SLAM是不受影响的;通常情况,激光SLAM在大场景下精度和鲁棒性比VSLAM更高;激光SLAM缺点在于,难于重定位(导致漂移)、构建地图稀疏、成本高;Cartographer在论文上测试精度可以达到5cm甚至3cm;机械式3D激光雷达可以360°旋转;固态3D激光雷达用的最多的是livox,但是固态3D激光雷达有一个固定的FOV;
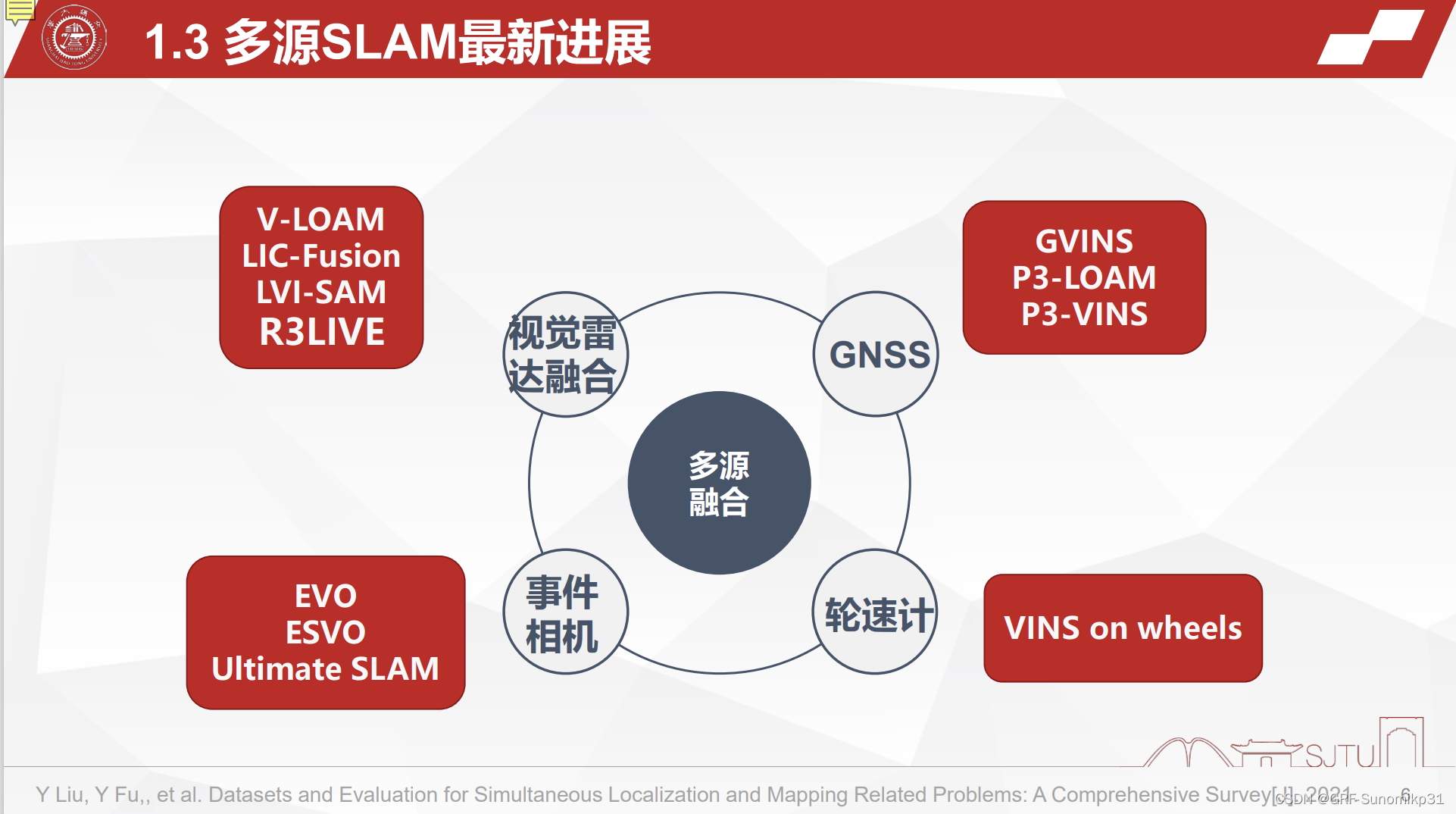
视觉和激光融合:比较早的工作V-LOAM(2014,非开源);
GNSS融合:在户外场景下可以获得全局坐标进而消除漂移;
事件相机融合:可以解决传统相机运动模糊和过曝的问题;
轮速计融合:VINS on wheels解决了一些场景下的退化问题,目前该场景已经非常完善了。
主讲人认为目前最有前景的是GNSS和SLAM的融合,因为GNSS和SLAM都是非常复杂的算法,并且做这块的并不是很多.
2 主流SLAM数据集回顾

KITTI:年代久远而且传感器较少;视觉SLAM一般不采用该数据集,而采用TUM(手持RGBD)和EUROC(无人机);
NCLT:地面机器人采集,相机采集频率低,传感器少;
OpenLORIS:地面机器人采集,相机内外参不公布;gt获取不严谨,是由激光SLAM跑出来的;
3 M2DGR采集平台与环境
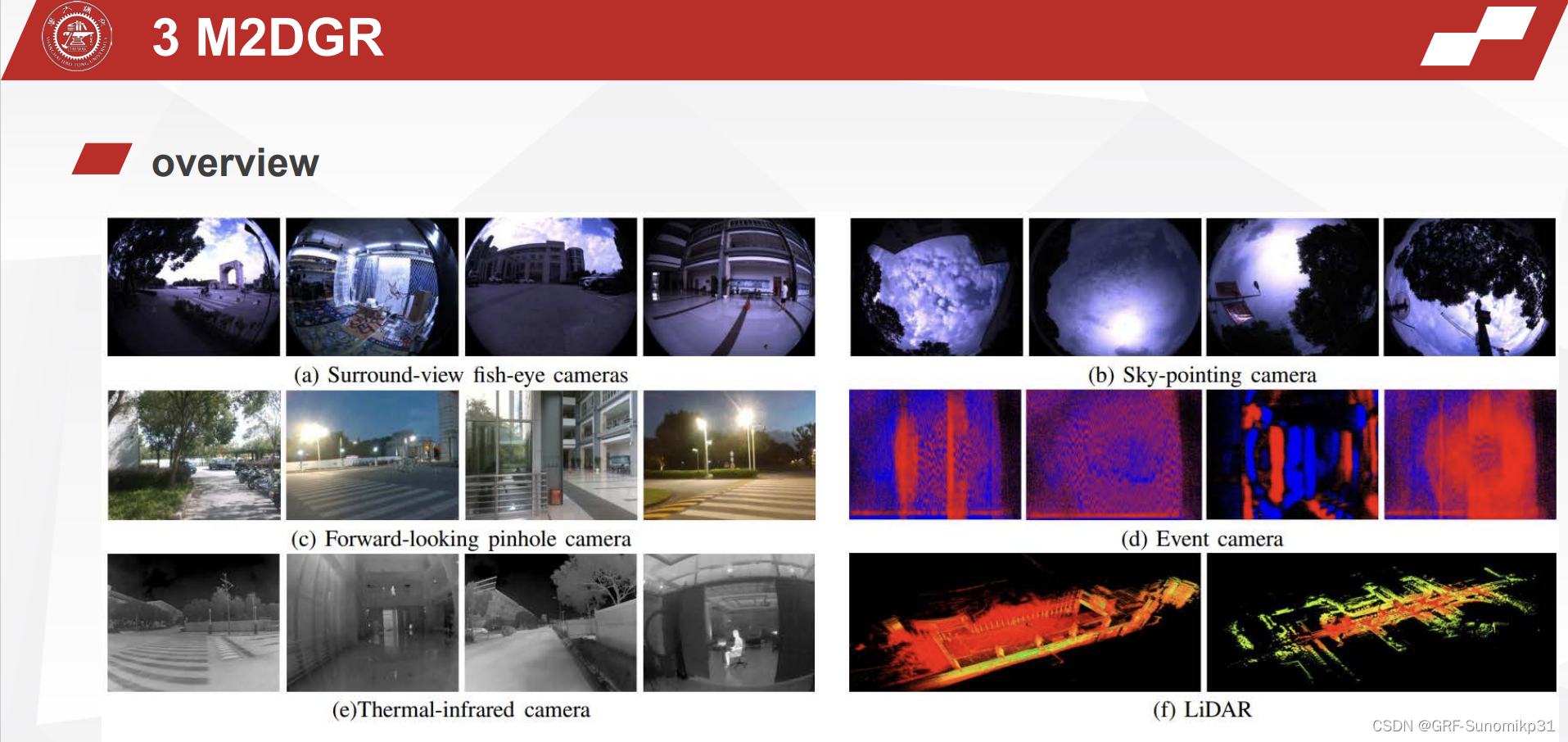
采集数据集的效果图;
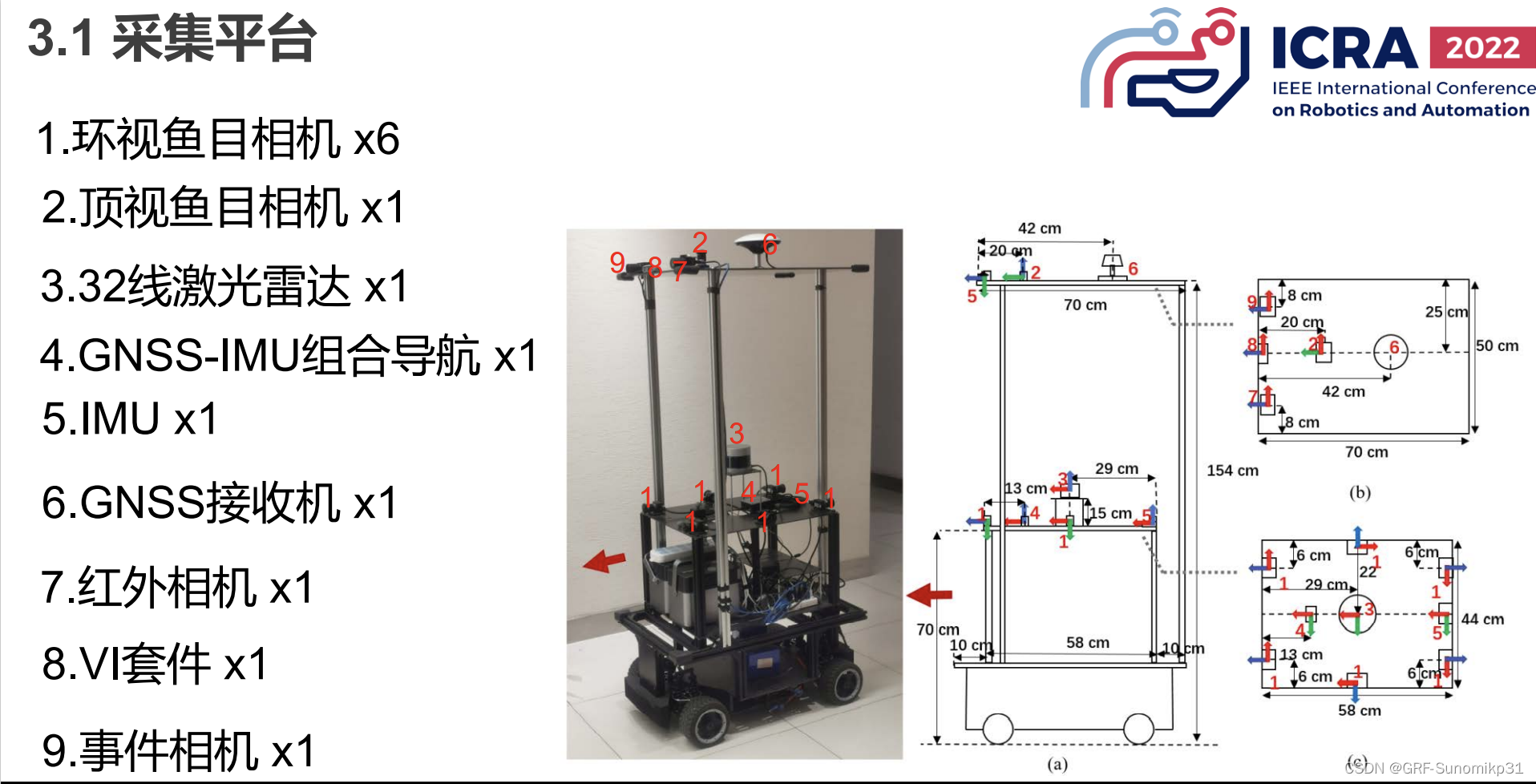
采集平台,具体设备如上;.GNSS-IMU组合导航主要用于采集室外RTK信号作为室外轨迹gt;lidar是通过网口连接到笔记本电脑的. IMU采用的是国产的消费级的设备(500-800rmb)

(a)室外的序列在上交进行采集的,这些序列都比较长,现有的SLAM算法在上面跑出的效果都比较不理想的, 属于非常有挑战的数据集;
(b)Roomdark是在全黑的场景下,用来对比普通相机 红外相机和事件相机的性能;
?目的是测试室内外交替的SLAM算法性能;
(d)这个序列也是非常有挑战性的;
4 实验评估与结果分析
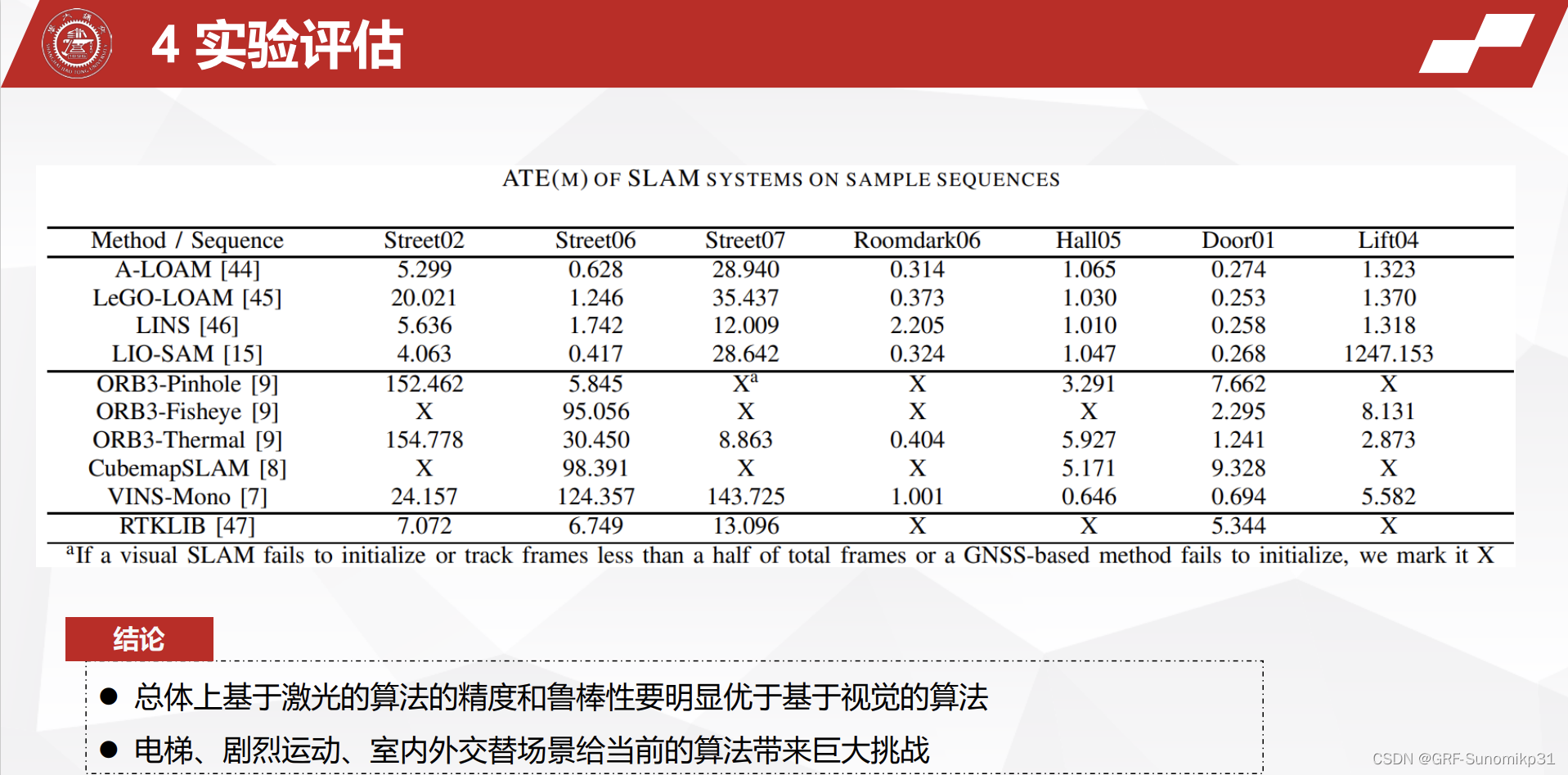
上面是7个比较有代表性的序列;
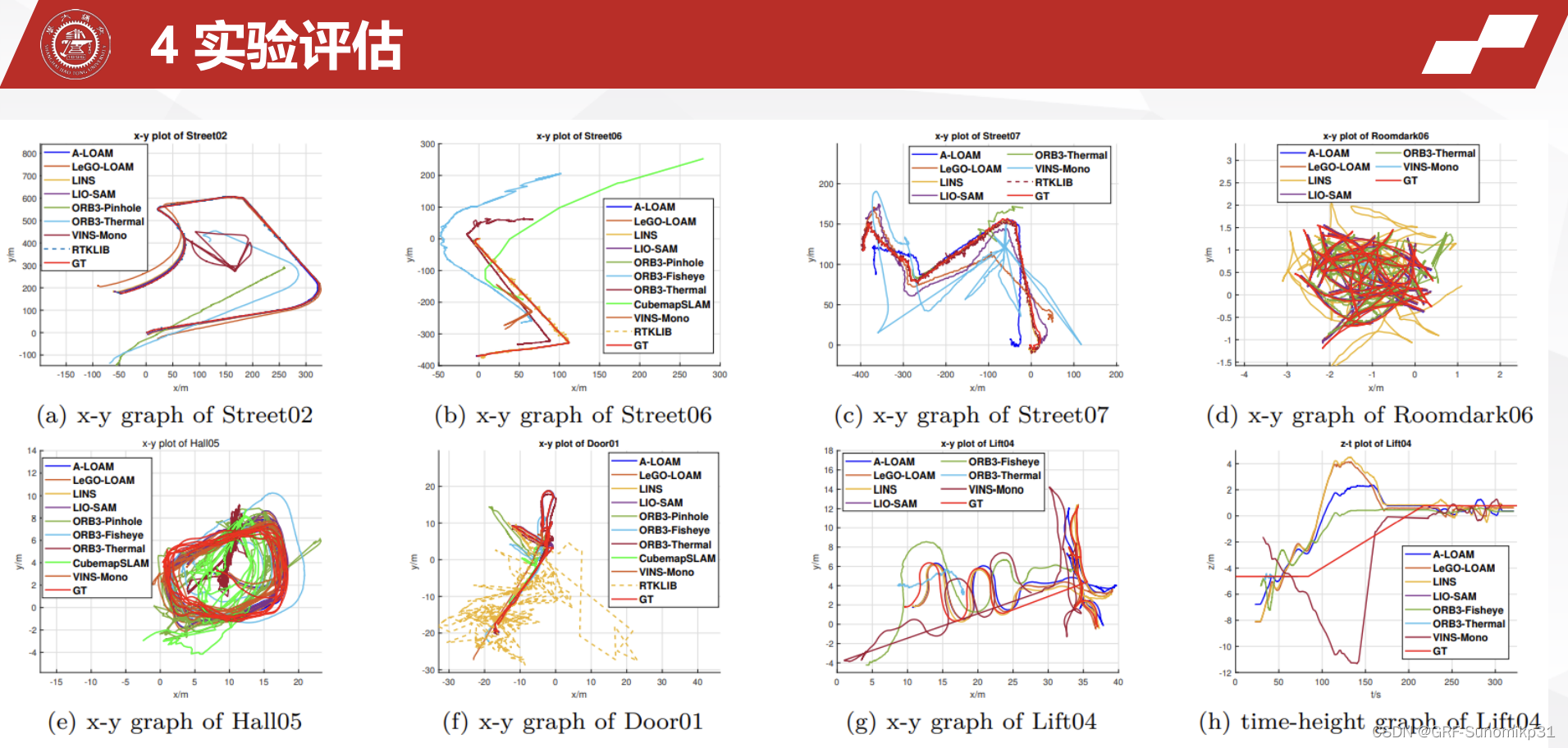
定位结果的可视化; 总结就是:群魔乱舞! 漂移都非常明显.
5 数据集使用指南
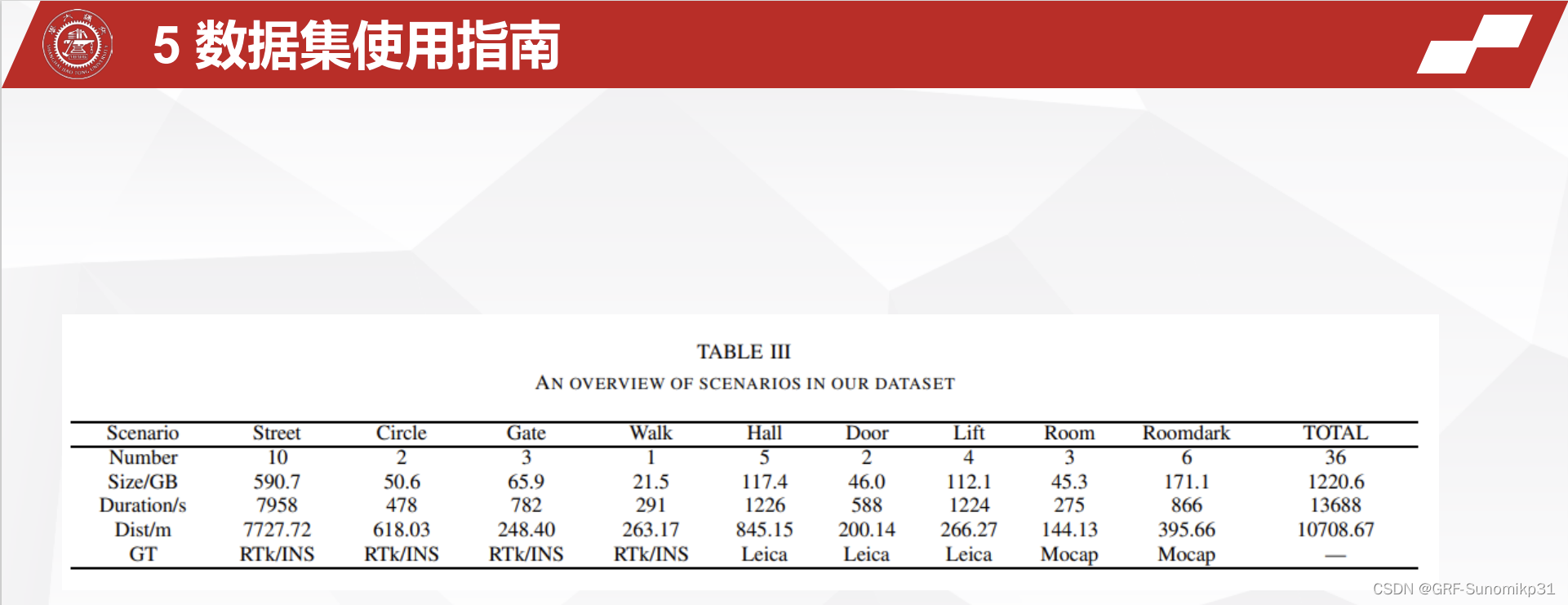
上面罗列了几个数据集的信息.

在校学生或者老师可以连接校园网 , 可以达到10M/S .

VSLAM单目的没法获得绝对尺度, 需要添加- s (scale). 如果你的算法能够稳定超过上面这些SOTA算法 (比如你的算法比orb-slam3高出2-3米), 恭喜你 , 你也可以发一篇ICRA了

以上是数据集使用的流程.作者会保持对该数据集的更新!
Q&A
1.相机和IMU的标定使用calib , 效果好并且标定简单;
2.九轴的IMU比六轴的IMU能采集更加立体的信息.
3.KITTI的数据集IMU数据集可能有问题 , 不建议使用KITTI跑视觉SLAM的系统.
4.NUC 3000-5000左右的性能不太好 , 建议使用顶配的NUC.