����Ŀ����١�����ǰͳ��ģ��(CSģ��)��չ�������˲�/���������˲� matlabʵ��
ԭ������,·���ĸ�λ����������
��Ի���Ŀ����ٵ�̽�֡�����֧�ֻ�ӭ��ϵ,Ҳ����վ��˽��
WX: ZB823618313
����Ŀ����١�����ǰͳ��ģ��(CSģ��)

ͼ:����һ��,ѧϰ��ô��
1. �Ի���Ŀ����ٵ�����
1.1. �Ի���Ŀ����ٵ�����
??����Ŀ�����һֱ��Ŀ����������о����ѵ���ص����⡣����Ŀ���˶�ģ�ͺ��˲��㷨��Ŀ����ٵ�������Ҫ���ء�����Ŀ��Ļ������в���Ԥ����,ʹ�����Ǻ��ѽ�����ȷ��Ŀ���˶�ģ�͡���ν���һ����Ч��ģ������ӳĿ����ʵ���˶��켣�Ǹ���Ŀ�����ϵͳ�����������⡣��������ʮ����о�,������ȡ����������Ҫ�ɹ���
��������:����Ŀ�����ӵ����Ҫ��:
������Ŀ�꽨ģ(�������ص㽲:��ǰͳ��ģ��)
����������(��һ�����ͽ���)
�˲������(��Ŀ�����ר��)
??���㷨����,��Ŀ�����ϵͳ��,���õ��˲��㷨���Կ������˲���Ϊ������ܵĹ����㷨���������˲�����һ�����ԡ���ƫ��������������СΪ������Ź����㷨,���о�ȷ����ѧ��ʽ��������ʹ��Ч�ܡ��������˲�����ʵ������һ�����ݴ�������,�����õ����˲�����,���ݻ�ȡ�����������ɵ��Ʒ��̵��Ƹ����µ�״̬���ơ����ڼ������ʹ洢��С,�Ƚ���������ʵʱ�����Ҫ��,�ڹ���ʵ���еõ��㷺Ӧ�á�
??����֮��,�������˲�Ҳ�㷺Ӧ�������Ŀ�����,����:
��չ�������˲�EKF
���������˲�UKF
�ݻ��������˲�CKF
����������˲�QKF
���IJ�ֿ������˲�CDKF
Divided difference filter DDF
��˹����˲�GSF
ǿ�����˲�STF
�����˲�PF
�� ��
1.2. Ŀ��ģ����
??����Ŀ��ģ��������Ŀ��״̬����ʱ��仯�Ĺ��̡�һ���õ�ģ�͵ֵ��ϴ��������ݡ���ǰ�������е�Ŀ������㷨���ǻ���ģ�ͽ���״̬���Ƶġ��ڿ������˲���������Ŀ����������,����״̬�ռ�Ļ���Ŀ�꽨ģ��Ϊ��Ҫ�о�����֮һ��
���õ�Ŀ���˶�ģ�Ͱ���:
1. �����˶�CVģ��, ����:
https://zhangdonglin.blog.csdn.net/article/details/124123556
2. �ȼ����˶�CAģ��, ����:https://zhangdonglin.blog.csdn.net/article/details/124126179
3. ����ת��CTģ��, ����:https://zhangdonglin.blog.csdn.net/article/details/124461832
4. Singer ģ��, ����:https://zhangdonglin.blog.csdn.net/article/details/124132379
5. ����ǰ��ͳ��ģ��,��������Ҫ��
6. Jerk ģ��, ����:https://zhangdonglin.blog.csdn.net/article/details/124135916
7. ������չģ��
��Ŀ��ģ����������ϵά�����Ƿ���������������:
1. Ŀ��Ŀռ��˶����ڲ�ͬ���˶��켣������ϵ
һά�˶�
��ά�˶�
��ά�˶�2. ���ݲ�ͬ������˶��Ƿ����
����䲻���ģ��
��������ģ��
2. "��ǰ"ͳ��CSģ��
����ǰ��ͳ��ģ�������ܺ�������������ġ��ӱ����Ͻ�,���㷨ģ����һ�����з����ֵ�ļ��ٶȵ�ģ�͡����㷨��Ϊ��Ŀ������ijһ���ٶȻ���ʱ,��һ�̵ļ��ٶ�ȡֵ������,��ֻ���ڡ���ǰ�����ٶȵ������ڡ���������ٶȵġ���ǰ��ͳ�Ƹ����ܶȲ������������ֲ�������,��ֵΪ����ǰ�����ٶȵ�Ԥ��ֵ��
Singer ģ����������Ŀ��Ļ���������������������֮��,�����ٶ������ֵ��
�ͼ��ٶȵĸ����ܶȺ����Ƿ��Ӿ��ȷֲ��ġ�
����ǰ��ͳ��ģ��(Current Statistical Model)����� Singer �������������������������ģ��,ʹ�������ʵ�ʵ����,����ΪĿ���ڵ�ǰʱ����ijһ���ٶȻ���ʱ,���û����ĵ�ǰͳ�����Կ�֪��һʱ�̵ļ��ٶȵ�ȡֵ���������,����������Χ�ڼ�����ǰ�����ٶȵ������ڡ�
ͨ������ģ�;ͽ����µ���������֮��,�����ٶȷ����ֵ��������ܶȷ��������������ֲ�,ʵ���˲�ʱ�õ�ǰʱ�̵�״̬���Ƶ�Ԥ����ٶ�ȥ������ٶȵľ�ֵ��
����ٶȷ��Ϸ����ֵһ��ʱ����������Ʒ����,��
x �� ( t ) = a �� ( t ) + a ( t ) a �B ( t ) = ? �� a ( t ) + w ( t ) (1) \ddot{x}(t)=\bar{a}(t) + a(t)\\ \dot{a}(t)=-\alpha a(t) + w(t) \tag{1} x��(t)=a��(t)+a(t)a�B(t)=?��a(t)+w(t)(1)
���� a �� ( t ) \bar{a}(t) a��(t) Ϊ���ٶȾ�ֵ, a ( t ) a(t) a(t)Ϊ���ֵ����ɫ����, w ( t ) w(t) w(t) �Ǿ�ֵΪ 0,����Ϊ 2 �� �� 2 2\alpha\sigma^2 2����2�ĸ�˹��������

ͼ:�յ�Эͬ����
3. "��ǰ"ͳ��CSģ��
3.1. ����ʱ��"��ǰ"ͳ��CSģ��
���ڡ���ǰ��ͳ��ģ��(Current Statistical Model)����� Singer �������������������������ģ��,
��� ����ǰ��ͳ��ģ�͵�״̬������ Singer ģ������,�ɱ�ʾΪ:
��״̬����Ϊ
X
=
[
x
,
x
�B
,
x
��
]
T
{X}=[x, \dot{x},\ddot{x}]^T
X=[x,x�B,x��]T
����ٶ�Ϊ
a
(
t
)
=
x
��
(
t
)
a(t)=\ddot{x}(t)
a(t)=x��(t)
����ʱ��Singerģ��Ϊ
X
�B
(
t
)
=
[
0
1
0
0
0
1
0
0
?
��
]
X
(
t
)
+
[
0
0
��
]
a
��
(
t
)
+
[
0
0
1
]
w
(
t
)
\dot{X}(t)=\begin{bmatrix}0&1&0\\0&0&1\\0&0&-\alpha\end{bmatrix}X(t) + \begin{bmatrix}0\\0\\\alpha\end{bmatrix}\bar{a}(t) + \begin{bmatrix}0\\0\\1\end{bmatrix}w(t)
X�B(t)=???000?100?01?��????X(t)+???00��????a��(t)+???001????w(t)
Singerģ��Ҳ���Ա���Ϊ
X
�B
(
t
)
=
A
X
(
t
)
+
B
u
a
��
(
t
)
+
B
w
(
t
)
\dot{X}(t)=AX(t) + B_u\bar{a}(t) + Bw(t)
X�B(t)=AX(t)+Bu?a��(t)+Bw(t)
����
A
=
[
0
1
0
0
0
1
0
0
?
��
]
,
B
u
=
[
0
0
��
]
,
B
=
[
0
0
1
]
A=\begin{bmatrix}0&1&0\\0&0&1\\0&0&-\alpha\end{bmatrix}, B_u=\begin{bmatrix}0\\0\\\alpha\end{bmatrix}, B= \begin{bmatrix}0\\0\\1\end{bmatrix}
A=???000?100?01?��????,Bu?=???00��????,B=???001????
3.2. ��ɢʱ�� "��ǰ"ͳ��CSģ��
����T������ɢ����,ת��Ϊ��ɢʱ��״̬����Ϊ:
X
k
+
1
=
F
k
X
k
+
G
k
a
��
k
+
W
k
(2)
X_{k+1}=F_kX_{k} +G_k\bar{a}_k + W_k \tag{2}
Xk+1?=Fk?Xk?+Gk?a��k?+Wk?(2)
����
F
k
=
[
1
T
(
��
T
?
1
+
e
?
��
T
)
/
��
2
0
1
(
1
?
e
?
��
T
)
/
��
0
0
?
e
?
��
T
]
F_k=\begin{bmatrix}1&T&(\alpha T-1+e^{-\alpha T})/\alpha^2\\0&1&(1-e^{-\alpha T})/\alpha\\0&0&-e^{-\alpha T}\end{bmatrix}
Fk?=???100?T10?(��T?1+e?��T)/��2(1?e?��T)/��?e?��T????
G
k
=
[
(
?
T
+
��
T
2
2
+
1
?
e
?
��
T
��
)
/
��
T
?
(
1
?
e
?
��
T
)
/
��
1
?
e
?
��
T
]
G_k=\begin{bmatrix}(-T+\frac{\alpha T^2}{2} + \frac{1-e^{-\alpha T}}{\alpha})/\alpha\\ T - (1-e^{-\alpha T})/\alpha\\ 1-e^{-\alpha T}\end{bmatrix}
Gk?=???(?T+2��T2?+��1?e?��T?)/��T?(1?e?��T)/��1?e?��T????
a
��
k
\bar{a}_k
a��k?���õ�ǰʱ�̵�״̬�����е�Ԥ����ٶ������:
a
��
k
=
x
��
^
k
�O
k
?
1
\bar{a}_k=\hat{\ddot{x}}_{k|k-1}
a��k?=x��^k�Ok?1?
����
W
k
W_k
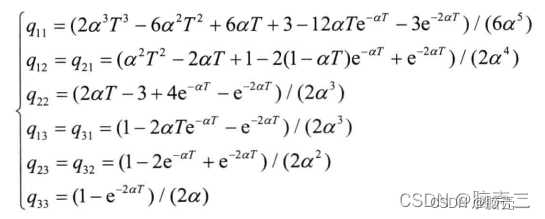
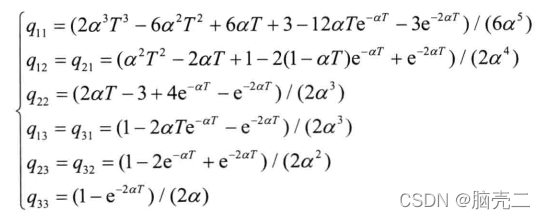
Wk?�ķ���Ϊ
Q
=
2
��
��
2
[
q
11
q
12
q
13
q
21
q
22
q
23
q
31
q
32
q
33
]
Q=2\alpha \sigma^2 \begin{bmatrix}q_{11}&q_{12}&q_{13}\\q_{21}&q_{22}&q_{23}\\q_{31}&q_{32}&q_{33}\end{bmatrix}
Q=2����2???q11?q21?q31??q12?q22?q32??q13?q23?q33?????
Q
Q
QΪ�Գƾ���
���е�
��
2
\sigma^2
��2Ϊ:
�� 2 = { 4 ? �� �� [ a m a x ? a �� k ] 2 , a �� k �� 0 4 ? �� �� [ a m a x + a �� k ] 2 , a �� k < 0 (3) \sigma^2= \begin{cases}\frac{4-\pi}{\pi} [a_{max}-\bar{a}_k]^2, \bar{a}_k\geq0 \\ \frac{4-\pi}{\pi} [a_{max}+\bar{a}_k]^2, \bar{a}_k<0\end{cases}\tag{3} ��2={��4?��?[amax??a��k?]2,a��k?��0��4?��?[amax?+a��k?]2,a��k?<0?(3)
����"��ǰ"ͳ��ģ��CS,���о��� F k F_k Fk?��Singerģ��һ��
����"��ǰ"ͳ��ģ��CS,������������ W k W_k Wk?����Singerģ��һ��,���� �� 2 \sigma^2 ��2��ȷ����һ��
3.3. "��ǰ"ͳ��CSģ�ͷ���
����ǰ��ͳ��ģ�����ü��ٶȵ�Ԥ��ֵ��ʵʱ������Ӧ�ص������̲��� �� 2 \sigma^2 ��2 ,���˼�ǿ������Ӧ�ԡ����,����ǰ��ͳ��ģ�ͱ� Singer ģ���ܷ�ӳ����ʵ��Ŀ��������ٶȵı仯��ͬʱ,����ǰ��ͳ��ģ�����˲���ÿһ��ʱ�̶�������ģ�͵ļ��ٶ�,���Զ��ٶ�ͻ����˶���Ŀ����кܺõĸ��١����Ҿ��㷨����,����ǰ��ͳ��ģ�ͺ� Singer ģ�ͼ���һģһ��,Ψһ�IJ�ֻͬ���������˲������о���õĵ�ǰ���ٶȵ�Ԥ��ֵ�ı����˶�״̬���̡�
����ǰ�����ٶ���Ŀ�����ǿ�ҵ������,���б� Singerģ���õĻ�����������,�����ڸ�ģ�͵���Ӧ�˲������и��õĹ��ƾ��ȡ�
��������������ص�:
1. ��Ŀ������ʱ,�����ۼ��ٶ�����0ʱ,��Ӧ���ٶȹ���ֵ$\hat{a}_{k-1}$,Ӧ����0,��ʱ����ʽ(3)�����$\sigma^2$����$\frac{(4-\pi)a_{max}^2}{\pi}$���÷��������п��ܷ�������ֵ,������Ŀ������ʱ,���ٶȾ������ı仯�����ԡ���ᵼ�»��ڸ�ģ�͵�״̬����ֵ������ʱ������Ӧ�ϴ�ķ��
2. ��Ŀ�����������С,�����ۼ��ٶ�Ϊ$��a_{max}$ʱ,��Ӧ�ļ��ٶȹ���ֵ$\hat{a}_{k-1}$ҲӦ����$��a_{max}$,��ʱ$\sigma^2$�ļ���ֵ����0���÷���Ϊ���п��ܷ������Сֵ,������Ŀ�������ǿ�����˶�ʱ,���ٶȱ仯�Ŀ�������С������ʵ���м��ٶ����κ�ʱ���������һ���仯������,�Ӷ�������Ӧ�Ĺ���ֵ�ڻ������ٶȾ���ֵ�ϴ��ҷ���ͻ��ʱ���нϴ�Ĺ�����

ͼ:����һ��,ѧϰ��ô��
4. "��ǰ"ͳ��CSģ��(��ά�ռ�)
��ά�ĵ�ǰͳ��ģ�ͺ�һά����,ֻ��Ҫ����ԽǶѵ��Ϳ�����
���Ƶ�,��ά�ĵ�ǰͳ��ģ��Ҳ���ơ�
4.1.����ʱ�� "��ǰ"ͳ��CSģ��
��״̬����Ϊ
X
=
[
x
,
x
�B
,
x
��
,
y
,
y
�B
,
y
��
]
T
{X}=[x, \dot{x},\ddot{x},y, \dot{y},\ddot{y}]^T
X=[x,x�B,x��,y,y�B?,y��?]T
����ٶ�Ϊ
a
(
t
)
=
[
x
��
(
t
)
,
y
��
(
t
)
]
T
a(t)=[\ddot{x}(t), \ddot{y}(t)]^T
a(t)=[x��(t),y��?(t)]T
���ٶȾ�ֵΪ:
a �� ( t ) = [ a �� x ( t ) , a �� y ( t ) ] T \bar{a}(t) =[\bar{a}_x(t) , \bar{a}_y(t) ]^T a��(t)=[a��x?(t),a��y?(t)]T
����ʱ��Singerģ��Ϊ
X �B ( t ) = [ 0 1 0 0 0 0 0 0 1 0 0 0 0 0 ? �� 0 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 ? �� ] X ( t ) + [ 0 0 0 0 �� 0 0 0 0 0 0 �� ] a �� ( t ) + [ 0 0 0 0 1 0 0 0 0 0 0 1 ] w ( t ) \dot{X}(t)=\begin{bmatrix}0&1&0&0&0&0\\0&0&1&0&0&0\\0&0&-\alpha&0&0&0 \\0&0&0&0 &1&0\\0&0&0&0 &0&1 \\0&0&0&0 &0&-\alpha \end{bmatrix} X(t) + \begin{bmatrix}0 &0\\0&0\\\alpha&0 \\ 0&0\\0&0\\0&\alpha\end{bmatrix}\bar{a}(t) +\begin{bmatrix}0&0\\0&0\\1&0\\ 0&0\\0&0\\0&1\end{bmatrix}w(t) X�B(t)=?????????000000?100000?01?��000?000000?000100?00001?��??????????X(t)+?????????00��000?00000��??????????a��(t)+?????????001000?000001??????????w(t)
Ϊ�˷���,����
A
=
[
0
1
0
0
0
1
0
0
?
��
]
,
B
u
=
[
0
0
��
]
,
B
=
[
0
0
1
]
A=\begin{bmatrix}0&1&0\\0&0&1\\0&0&-\alpha\end{bmatrix}, B_u=\begin{bmatrix}0\\0\\\alpha\end{bmatrix}, B= \begin{bmatrix}0\\0\\1\end{bmatrix}
A=???000?100?01?��????,Bu?=???00��????,B=???001????
����ʽ��Ϊ
X
�B
(
t
)
=
[
A
0
0
A
]
X
(
t
)
+
[
B
u
0
0
B
u
]
a
��
(
t
)
+
[
B
0
0
B
]
w
(
t
)
\dot{X}(t)=\begin{bmatrix}A&0\\0&A \end{bmatrix}X(t) + \begin{bmatrix}B_u&0\\0&B_u\end{bmatrix}\bar{a}(t) + \begin{bmatrix}B&0\\0&B\end{bmatrix}w(t)
X�B(t)=[A0?0A?]X(t)+[Bu?0?0Bu??]a��(t)+[B0?0B?]w(t)
4.2. ��ɢʱ��"��ǰ"ͳ��CSģ��
����T������ɢ����,ת��Ϊ��ɢʱ��״̬����Ϊ:
X
k
+
1
=
F
k
X
k
+
G
k
a
��
k
+
W
k
X_{k+1}=F_kX_{k} +G_k\bar{a}_k + W_k
Xk+1?=Fk?Xk?+Gk?a��k?+Wk?
����
F
k
=
[
F
0
0
F
]
F_k=\begin{bmatrix}F&0\\0&F \end{bmatrix}
Fk?=[F0?0F?]
F = [ 1 T ( �� T ? 1 + e ? �� T ) / �� 2 0 1 ( 1 ? e ? �� T ) / �� 0 0 ? e ? �� T ] F=\begin{bmatrix}1&T&(\alpha T-1+e^{-\alpha T})/\alpha^2\\0&1&(1-e^{-\alpha T})/\alpha\\0&0&-e^{-\alpha T}\end{bmatrix} F=???100?T10?(��T?1+e?��T)/��2(1?e?��T)/��?e?��T????
����
G
k
=
[
G
0
0
G
]
G_k=\begin{bmatrix}G&0\\0&G \end{bmatrix}
Gk?=[G0?0G?]
G = [ ( ? T + �� T 2 2 + 1 ? e ? �� T �� ) / �� T ? ( 1 ? e ? �� T ) / �� 1 ? e ? �� T ] G_=\begin{bmatrix}(-T+\frac{\alpha T^2}{2} + \frac{1-e^{-\alpha T}}{\alpha})/\alpha\\ T - (1-e^{-\alpha T})/\alpha\\ 1-e^{-\alpha T}\end{bmatrix} G=????(?T+2��T2?+��1?e?��T?)/��T?(1?e?��T)/��1?e?��T????
����
W
k
W_k
Wk?�ķ���Ϊ
Q
k
=
[
Q
0
0
Q
]
Q_k=\begin{bmatrix}Q&0\\0&Q \end{bmatrix}
Qk?=[Q0?0Q?]
Q
=
2
��
��
2
[
q
11
q
12
q
13
q
21
q
22
q
23
q
31
q
32
q
33
]
Q=2\alpha \sigma^2 \begin{bmatrix}q_{11}&q_{12}&q_{13}\\q_{21}&q_{22}&q_{23}\\q_{31}&q_{32}&q_{33}\end{bmatrix}
Q=2����2???q11?q21?q31??q12?q22?q32??q13?q23?q33?????
Q
Q
QΪ�Գƾ���,��
���е� �� 2 \sigma^2 ��2Ϊ:
�� 2 = { 4 ? �� �� [ a m a x ? a �� k ] 2 , a �� k �� 0 4 ? �� �� [ a m a x + a �� k ] 2 , a �� k < 0 (3) \sigma^2= \begin{cases}\frac{4-\pi}{\pi} [a_{max}-\bar{a}_k]^2, \bar{a}_k\geq0 \\ \frac{4-\pi}{\pi} [a_{max}+\bar{a}_k]^2, \bar{a}_k<0\end{cases}\tag{3} ��2={��4?��?[amax??a��k?]2,a��k?��0��4?��?[amax?+a��k?]2,a��k?<0?(3)
�������x �� y ά���������һ��,��ֱ����Q,����������,���ﵱ����ȼ���
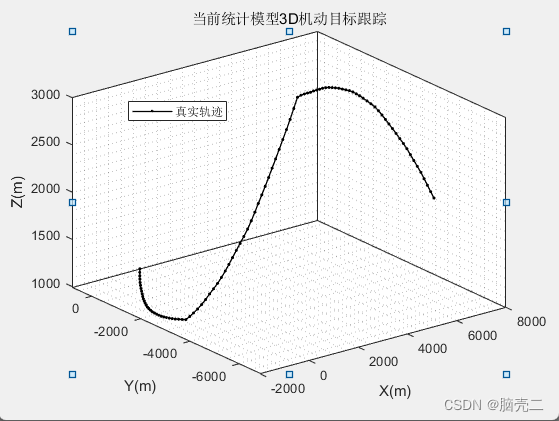
5. ��ǰͳ��ģ�켣����matlab����
λ�ù켣: ͼ1
�ٶȹ켣: ͼ2
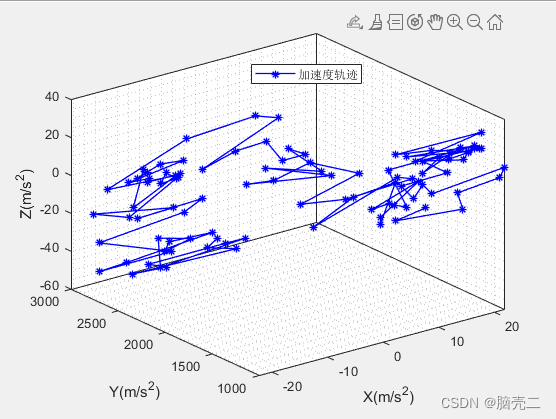
���ٶȹ켣: ͼ3
���ٶȱ仯�ʹ켣: ͼ4

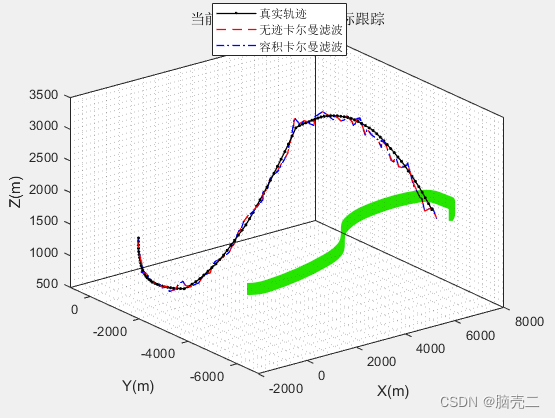
6. ��ǰͳ��CSģ����άĿ�����
�㷨:
�ݻ��������˲�:https://zhangdonglin.blog.csdn.net/article/details/115689468
���������˲�:https://zhangdonglin.blog.csdn.net/article/details/115381848
������: �״ﴫ����
�״�����������Ϊ����ͽǶ�
r k m = r k + r ~ k b k m = b k + b ~ k {r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k rkm?=rk?+r~k?bkm?=bk?+b~k?
����
r k = ( x k ? x 0 ) + ( y k ? y 0 ) 2 ) b k = tan ? ? 1 y k ? y 0 x k ? x 0 r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ rk?=(xk??x0?)+(yk??y0?)2)?bk?=tan?1xk??x0?yk??y0??
[ x 0 , y 0 ] [x_0,y_0] [x0?,y0?]Ϊ�״�����,һ�����Ϊ0���״�����Ϊ z k = [ r k , b k ] �� z_k=[r_k,b_k]' zk?=[rk?,bk?]�����״����ⷽ��Ϊ
R k = cov ( v k ) = [ �� r 2 0 0 �� b 2 ] R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 \\0 & \sigma_b^2 \end{bmatrix} Rk?=cov(vk?)=[��r2?0?0��b2??]
���ٹ켣����:
7. ����ģ��
7.1 ����ת��CTģ��
����ת��CT�˶�ģ�ͼ���һ������:������ά����ά
7.2. �ȼ����˶�CAģ��
�ȼ����˶�CAģ�ͼ���һ������
7.3. ����ǰ��ͳ��ģ��
��ǰͳ��ģ�ͼ���һ������
7.4. Singerģ��
Singerģ�ͼ���һ������
8. ����
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%���ٹ켣
figure
plot3(sV(1,:,1,1),sV(4,:,1,1),sV(7,:,1,1),'.-k',eV(1,:,1,1),eV(4,:,1,1),eV(7,:,1,1),'--r',eV(1,:,1,2),eV(4,:,1,2),eV(7,:,1,2),'-.b','LineWidth',1)
xlabel('X(m)');ylabel('Y(m)');zlabel('Z(m)');
grid minor;
box on;
legend('��ʵ�켣','���������˲� ','�ݻ��������˲� ')
title('��ǰͳ��ģ��3D����Ŀ�����')
%%%%%%%%%%����ά��(X Y Z)���ٹ켣
ii=1:N; % 1 3 5ָ����λ��,2 4 5 ָ�����ٶ�
%%%%%%%% X ���ٹ켣
figure
plot(ii,sV(1,ii,1,1),'.-k',ii,meaV(1,ii,1),'-g',ii,eV(1,ii,1,1),'--r',ii,eV(1,ii,1,2),'-.b','LineWidth',1)
xlabel('ʱ��(s)');
ylabel('m');
legend('��ʵ�켣','�״����','���������˲� ','�ݻ��������˲� ')
title('���ٹ켣:X ά')
%%%%%%%% Y ���ٹ켣
figure
ii=1:N;
plot(ii,sV(4,ii,1,1),'.-K',ii,meaV(2,ii,1),'-g',ii,eV(4,ii,1,1),'--r',ii,eV(4,ii,1,2),'-.b','LineWidth',1)
%plot3(sV(1,:,1,1),sV(3,:,1,1),sV(5,:,1,1),'g',xV(1,:,1,1),xV(3,:,1,1),xV(5,:,1,1),'b')
xlabel('ʱ��(s)');
ylabel('m');
legend('��ʵ�켣','�״����','���������˲� ','�ݻ��������˲� ')
title('���ٹ켣:Z ά')
%%%%%%%% Z ���ٹ켣
figure
ii=1:N;
plot(ii,sV(7,ii,1,1),'.-K',ii,meaV(3,ii,1),'-g',ii,eV(7,ii,1,1),'--r',ii,eV(7,ii,1,2),'-.b','LineWidth',1)
%plot3(sV(1,:,1,1),sV(3,:,1,1),sV(5,:,1,1),'g',xV(1,:,1,1),xV(3,:,1,1),xV(5,:,1,1),'b')
xlabel('ʱ��(s)');
ylabel('m');
legend('��ʵ�켣','�״����','���������˲� ','�ݻ��������˲� ')
title('���ٹ켣:Z ά')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% %%%��RMSE
for i=1:MC
sprintf('rate of process:%3.1f%%',(3*MC+i)/(4*MC)*100)
for k=1:N
for c=1:chan
error(:,c)=sV(:,k,i,1)-eV(:,k,i,c);
% RMSE
error2(:,c)=error(:,c).^2;
error2_dis(c)=error2(1,c)+error2(4,c)+error2(7,c);
error2_vel(c)=error2(2,c)+error2(5,c)+error2(8,c);
position(k,i,c)=error2_dis(c);
velocity(k,i,c)=error2_vel(c);
end
end
end
%% RMSE
for c=1:chan
rms_position(:,c)=sqrt(sum(position(:,:,c),2)./MC);
rms_velocity(:,c)=sqrt(sum(velocity(:,:,c),2)./MC);
end
ii=1:N;
figure;%position
plot(ii,rms_position(ii,1),'-*r',ii,rms_position(ii,2),'-cs','LineWidth',1);
% legend('EKF','UF')
legend('���������˲� ','�ݻ��������˲� ')
xlabel('t/s');ylabel('Position RMSE');
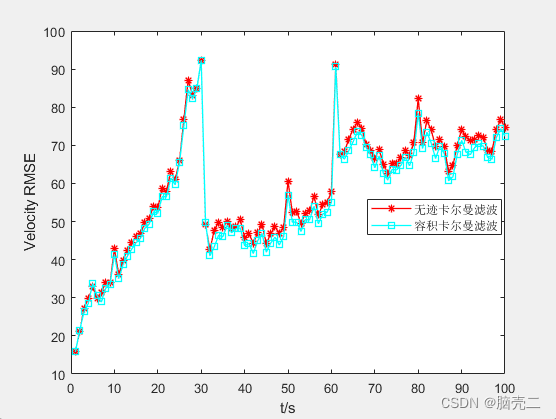
figure;%�ٶ�
plot(ii,rms_velocity(ii,1),'-*r',ii,rms_velocity(ii,2),'-cs','LineWidth',1);
legend('���������˲� ','�ݻ��������˲� ')
xlabel('t/s');ylabel('Velocity RMSE');
==ԭ������,·���ĸ�λ����������=