https://zh-v2.d2l.ai/chapter_convolutional-modern/resnet.html
ResNet
引入
加更多的层总是改进精度吗?
残差块
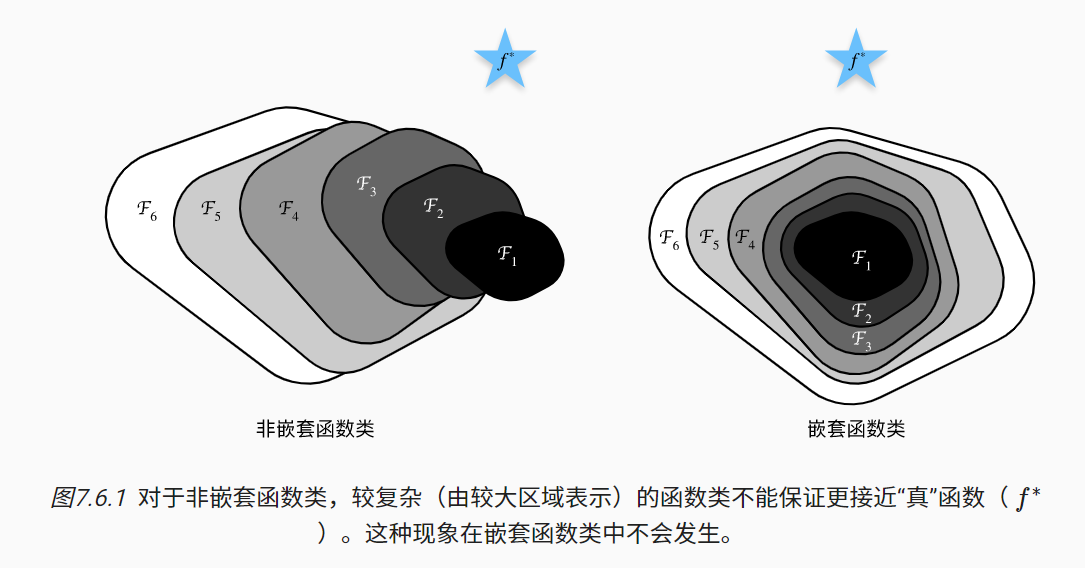
- 串联一个层改变函数类,我们希望能扩大函数类
- 残差块加入快速通道(右边)来得到
f ( x ) = x + g ( x ) f(x)=x+g(x) f(x)=x+g(x)
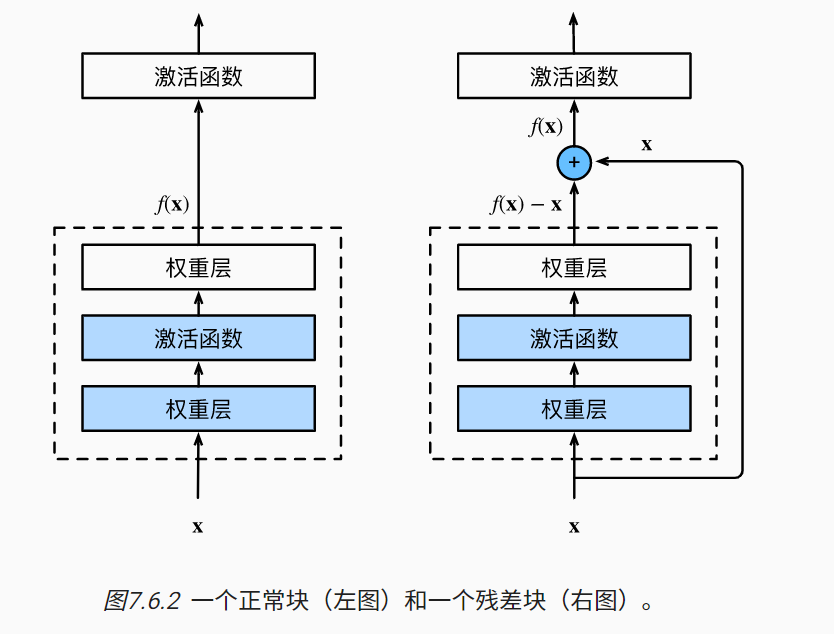
前馈补偿,使得梯度不容易消失
告诉复杂模型可以包含小模型
允许嵌入小网络,使得我们先去训练小网络
ResNet 块细节
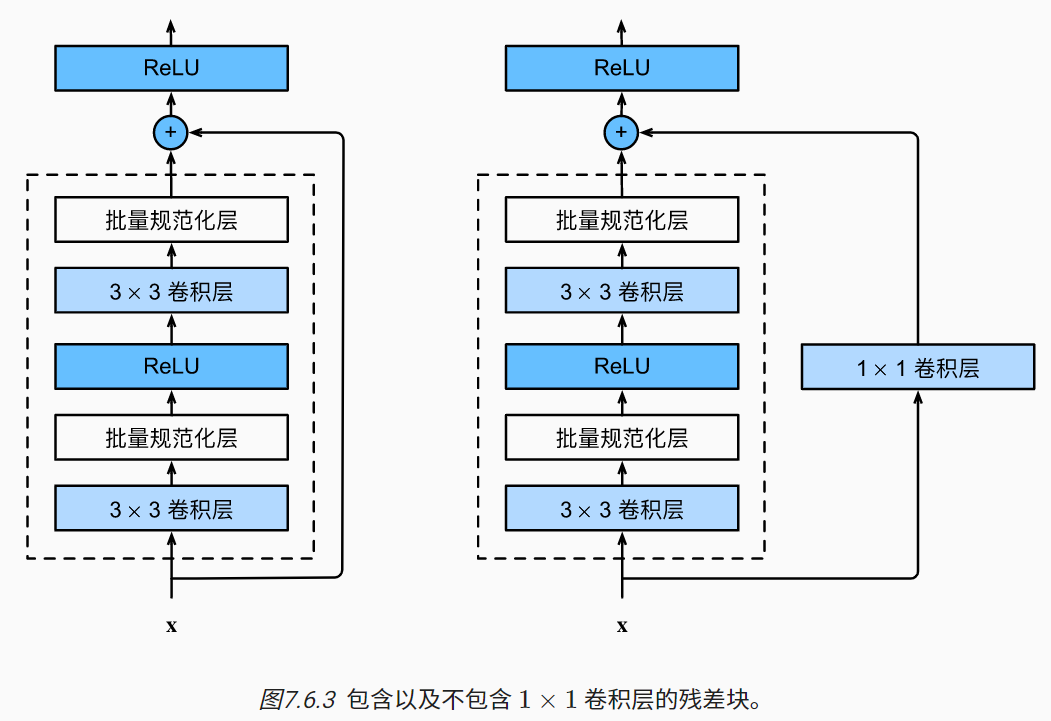
- Batch Normalization:批标准化,将分散的数据统一,使得机器学习更容易学习。
- 卷积层变换通道数
ResNet 块
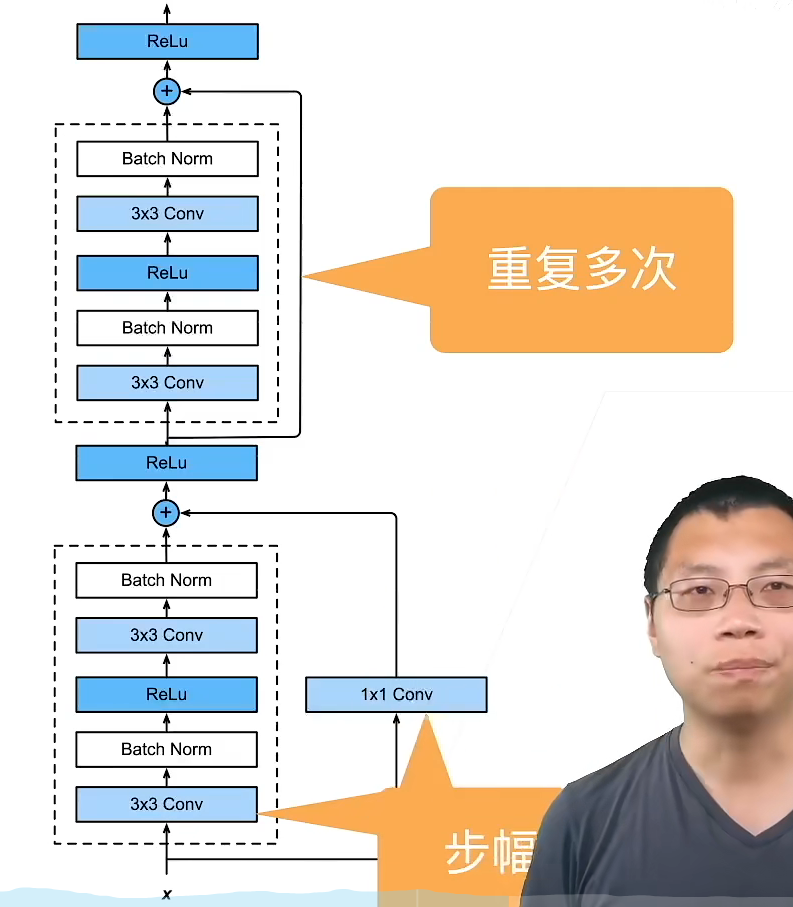
- 高宽减半 ResNet 块(步幅2)
- 后接多个高宽不变 ResNet 块
1*1卷积是通道数加倍
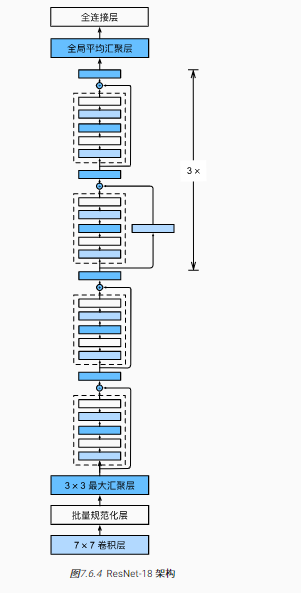
ResNet 架构
- 类似 VGG 和 GoogleNet 的总体架构
- 但替换成了 ResNet 块
总结
- 残差块使得很深的网络更加容易训练
- 甚至可以训练一千层的网络
- 残差网络对随后的深层神经网络设计产生了深远影响,无论是卷积类网络还是全连接类网络。
代码实现
ResNet沿用了VGG完整的 3 × 3 3\times3 3×3卷积层设计。 残差块里首先有2个有相同输出通道数的 3 × 3 3\times3 3×3卷积层。 每个卷积层后接一个批量规范化层和ReLU激活函数。 然后我们通过跨层数据通路,跳过这2个卷积运算,将输入直接加在最后的ReLU激活函数前。 这样的设计要求2个卷积层的输出与输入形状一样,从而使它们可以相加。 如果想改变通道数,就需要引入一个额外的卷积层来将输入变换成需要的形状后再做相加运算。 残差块的实现如下:
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
class Residual(nn.Module): #@save
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
输入和输出性状一致
blk = Residual(3,3)
X = torch.rand(4, 3, 6, 6)
Y = blk(X)
Y.shape
torch.Size([4, 3, 6, 6])
我们也可以在增加输出通道数的同时,减半输出的高和宽。
blk = Residual(3,6, use_1x1conv=True, strides=2)
blk(X).shape
torch.Size([4, 6, 3, 3])
- 4 是 batch_size,不是通道数
- Residual 的输入和输出通道不同时,需要使用 1 × 1 1\times1 1×1卷积层改变x通道,不然没法执行y += x
ResNet 模型
ResNet的前两层跟之前介绍的GoogLeNet中的一样: 在输出通道数为64、步幅为2 7 × 7 7\times7 7×7的卷积层后,接步幅为2的 3 × 3 3\times3 3×3的最大汇聚层。 不同之处在于ResNet每个卷积层后增加了批量规范化层。
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。 ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。 第一个模块的通道数同输入通道数一致。 由于之前已经使用了步幅为2的最大汇聚层,所以无须减小高和宽。 之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,我们对第一个模块做了特别处理。
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
接着在ResNet加入所有残差块,这里每个模块使用2个残差块。
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
- 表示对列表解参入参
最后,与GoogLeNet一样,在ResNet中加入全局平均汇聚层,以及全连接层输出。
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
在训练ResNet之前,让我们观察一下ResNet中不同模块的输入形状是如何变化的。 在之前所有架构中,分辨率降低,通道数量增加,直到全局平均汇聚层聚集所有特征。
X = torch.rand(size=(1, 1, 224, 224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t', X.shape)
Sequential output shape: torch.Size([1, 64, 56, 56])
Sequential output shape: torch.Size([1, 64, 56, 56])
Sequential output shape: torch.Size([1, 128, 28, 28])
Sequential output shape: torch.Size([1, 256, 14, 14])
Sequential output shape: torch.Size([1, 512, 7, 7])
AdaptiveAvgPool2d output shape: torch.Size([1, 512, 1, 1])
Flatten output shape: torch.Size([1, 512])
Linear output shape: torch.Size([1, 10])
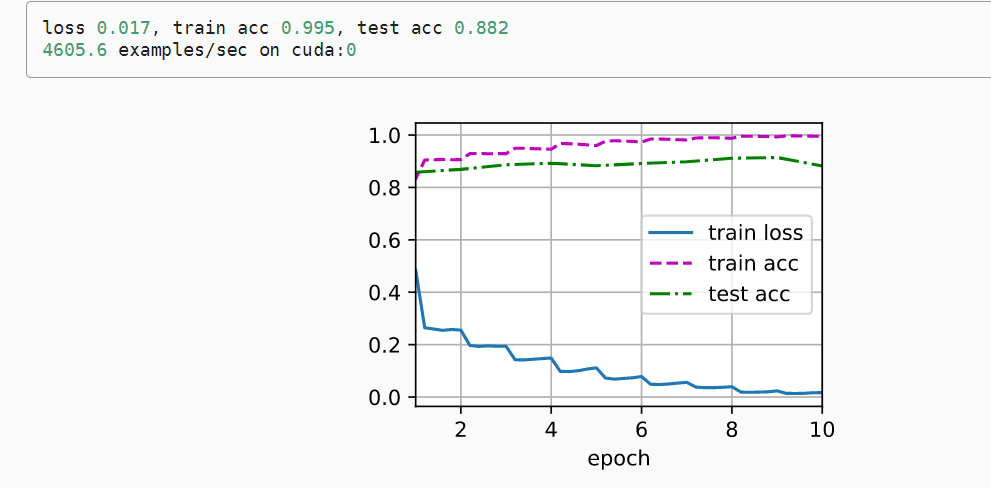
训练模型
lr, num_epochs, batch_size = 0.05, 10, 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
小结
-
学习嵌套函数(nested function)是训练神经网络的理想情况。在深层神经网络中,学习另一层作为恒等映射(identity function)较容易(尽管这是一个极端情况)。
-
残差映射可以更容易地学习同一函数,例如将权重层中的参数近似为零。
-
利用残差块(residual blocks)可以训练出一个有效的深层神经网络:输入可以通过层间的残余连接更快地向前传播。
-
残差网络(ResNet)对随后的深层神经网络设计产生了深远影响。