1.论文
论文链接:https://arxiv.org/pdf/1811.10452.pdf
代码比较简单,我直接看没复现,复现看另外一篇文章。[CAN] Context-Aware Crowd Counting 复现过程记录_wpw5499的博客-CSDN博客
参考:人群计数[CAN](Context-AwareCrowdCounting)代码解读 - 百度文库?
[Crowd_Counting]-CAN-CVPR2019 - 知乎
2.摘要
????????以往全卷积网络对一张图片的不同地方,都是用了相同尺度的卷积核,感受野都一样,这样无差别对待是有问题的,所以需要让不同人头大小的尺度的信息反应到特征中来,不同的是,通过检测出feature中的细节信息作为attention,去优化特征,最终产生融合了尺度信息的context-aware feature。
3.主要内容

????????本文的结构其实是一个3段式的结构,front-end, context-aware block,back-end三个部分,front-end跟back-end就是CSRNet的front-end,back-end,跟CSRNet一样,所以本文的方法相当于给CSRNet中间插入了一个context-aware模块。

1.context-aware模块
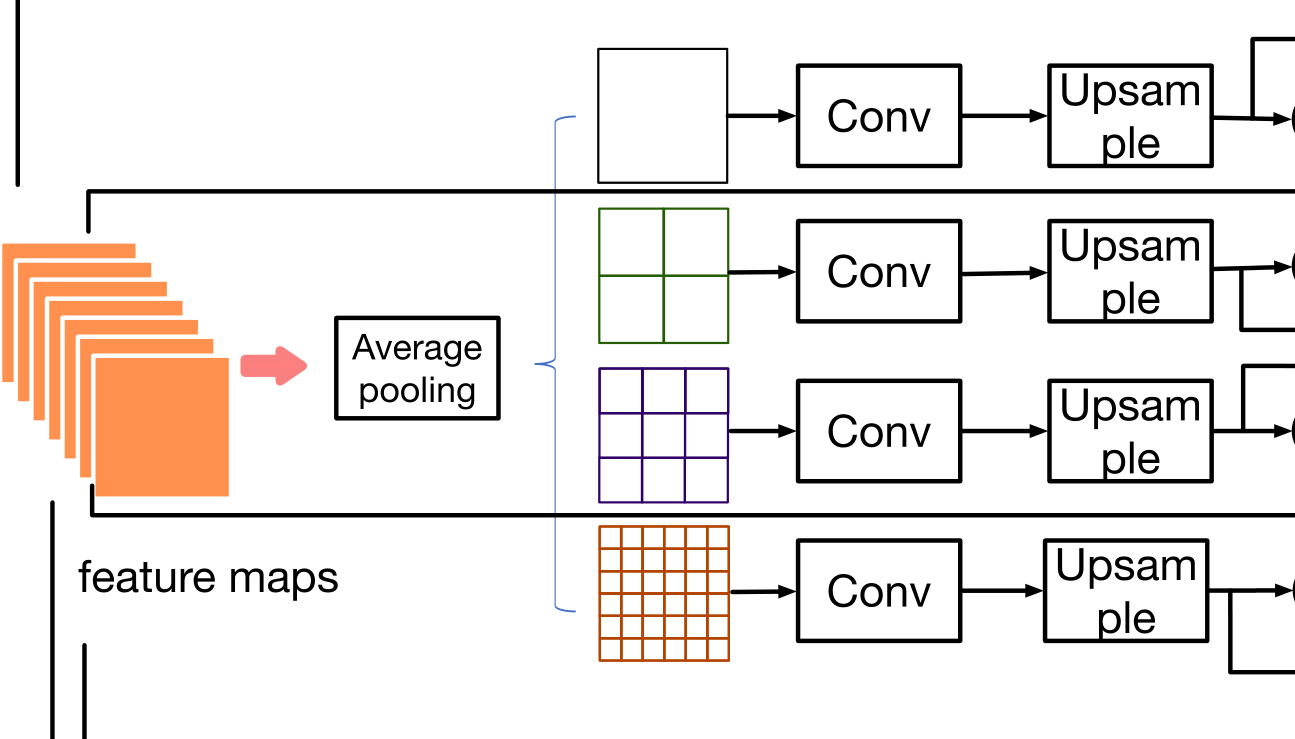
????????Front-end就是VGG16的前10层,输出512通道的feature,这里称为fv,然后对fv类似于SPP的方法,分成4路,分别用average-pooling分成1x1,2x2,3x3,6x6四种分块方式,然后对每种分块方式经过1x1的卷积,以及bilinear upsampling恢复到fv的尺寸,这种先下采样,再卷积,再上采样恢复出来的feature称为scale-aware。

?Pave,Fj,Ubi分别表示average pooling,conv,upsampling
对应图中这个部分
2.Contrast features:
????????拿backbone的feature fv减去scale-aware feature,就是contrast feature,scale-aware feature是先下采样,再上采样得来的,因此相比于fv丢失了细节,所以constrast则是用fv-sj,就获得了这些丢失的细节,文中说这叫做saliency
?
?3.Contextual features
????????将contrast feature cj作为attention,去过滤scale-aware feature sj,具体的做法是cj经过conv和sigmod,获得一个weight map:
?????????然后拿wj跟sj做point-wise乘法,最后4路的feature加起来,最后再跟backbone的feature fv concat起来,形成1024通道的feature,就称为contextual feature:
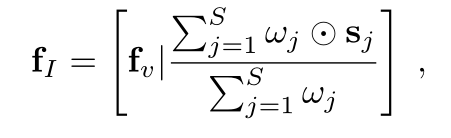
?????????这里[・|・]表示feature的concat操作,最后这个fI就输入back-end
4.融合perspective map的信息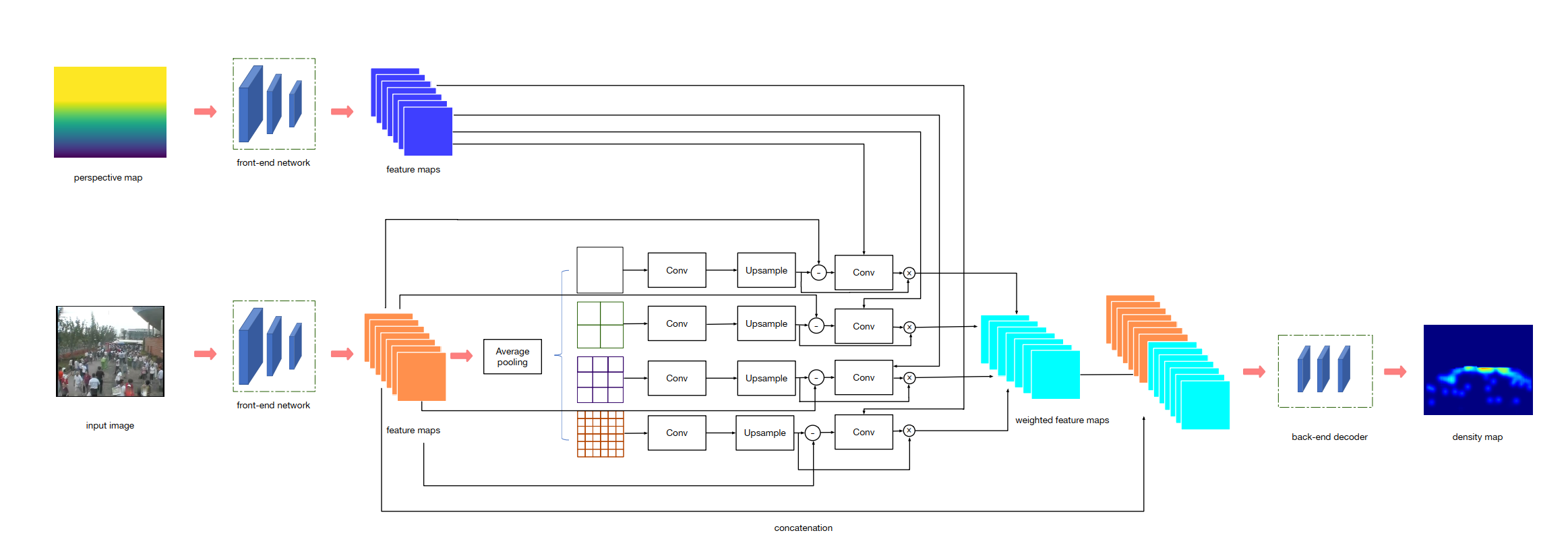
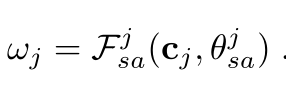
????????对于存在perspective map的ground truth的dataset,本文尝试把perspective map的信息融合进来,融合的方式是先用VGG16的backbone去提取persepctive的特征fg,然后在求weight map wj时,融入perspective map的feature,做法如下:
?????????就是把cj跟fg concat起来,再经过conv+sigmod,产生weight map wj,去对scale-aware feature进行相乘,其他方面都不变。
实验
老文章了,实验没什么好看的,直接看消融。

VGG-SIMPLE表示就是直接front-end+back-end,没有中间context-aware模块,其实就是CSRNet,
VGG-CONCAT表示中间模块只把backbone的feature fv跟scale-aware feature sj进行concat,再给back-end,没有计算weight-map对sj进行过滤
VGG-NCONT表示用sj去学习weight map wj,而不是用contrast feature cj去学习weight map,去过滤sj
可见其实巨大的Gain本身来自于加了中间这个模块本身,即可能加了一个SPP模块,contrast feature本身作用不大。
代码
整个网络代码如下:可以看到forward过程中有四个过程,
x = self.frontend(x) # 这就是frontend,即VGG前10层 x = self.context(x) # 文中提出的中间块 x = self.backend(x) # VGG的backend x = self.output_layer(x) # 1x1的卷积输出。
#本????络的模型classCANNet(nn.Module):
def__init__(self,load_weights=False):super(CANNet,self).__init__()self.seen=0
#使?前?已经建?的提取多尺度的上下?信息的模型self.context=ContextualModule(512,512)
#?络前端,‘M’表?这?层是?个MaxPooling池化层,frontend_feat表?的是VGG-16?络的前10层self.frontend_feat=[64,64,'M',128,128,'M',256,256,256,'M',512,512,512]
#?络后端,back_feat表?的是采?空洞卷积的后端self.backend_feat=[512,512,512,256,128,64]
#前端和后端都使?了make_layers()函数?定义实现self.frontend=make_layers(self.frontend_feat)
self.backend=make_layers(self.backend_feat,in_channels=512,batch_norm=True,dilation=True)#最后的output层采?了1*1卷积核实现了特征平?数量向1的转变。
self.output_layer=nn.Conv2d(64,1,kernel_size=1)#根据前?load_weights为False,所以这个if?定会执?
ifnotload_weights:
#保存VGG-16前10层的?络结构mod=models.vgg16(pretrained=True)
#先调?self._initialize_weights()?法进??动初始化self._initialize_weights()
#net.state_dict()是?络全部参数的字典,??的键是?络各层参数的名字,值是封装好参数的Tensor
#dict.items()语句会返回?个可遍历的(键,值)元组,通过遍历这个元组的?式,即通过逐个的i访问mod.state_dict().items()[i][1].data[:],即可遍历完所有的参数,完成拷贝。
foriinrange(len(self.frontend.state_dict().items())):list(self.frontend.state_dict().items())[i][1].data[:]=list(mod.state_dict().items())[i][1].data[:]
#对?络forward的定义和初始化的?法defforward(self,x):
x=self.frontend(x)x=self.context(x)
x=self.backend(x)x=self.output_layer(x)returnx
#net.modules()是?络各层的列表,我们使?m来遍历列表中的元素,判断m的层类型,然后分别使?init下的函数来完成初始化。def_initialize_weights(self):
forminself.modules():
#正态分部:nn.init.normal_(tensor,mean=0,std=1)ifisinstance(m,nn.Conv2d):
nn.init.normal_(m.weight,std=0.01)ifm.biasisnotNone:
nn.init.constant_(m.bias,0)elifisinstance(m,nn.BatchNorm2d):
nn.init.constant_(m.weight,1)nn.init.constant_(m.bias,0)
#?络结构?定义的函数,是写在类的定义之外的
defmake_layers(cfg,in_channels=3,batch_norm=False,dilation=False):
#通过dilation与否判断空洞率的??,若是False则是?络前端,空洞率为1,若是True则是?络后端,空洞率为2。ifdilation:
d_rate=2else:
d_rate=1layers=[]
#接下来遍历传?的frontend_feat和backend_feat,以此来确定?络层的类型,若是’M’则是MaxPooling层;
#若是数字,则是卷积层,?套卷积层包括了Conv2d层,BatchNorm层和ReLU层,遍历完毕后,即可完成对?络前端和后端的创建。
forvincfg:ifv=='M':
layers+=[nn.MaxPool2d(kernel_size=2,stride=2)]else:
conv2d=nn.Conv2d(in_channels,v,kernel_size=3,padding=d_rate,dilation=d_rate)ifbatch_norm:
layers+=[conv2d,nn.BatchNorm2d(v),nn.ReLU(inplace=True)]
else:
#由于batch_norm=False,直接执?else语句
layers+=[conv2d,nn.ReLU(inplace=True)]in_channels=v
returnnn.Sequential(*layers)主要看context阶段:
import torch.nn as nn
import torch
from torch.nn import functional as F
from torchvision import models
#model.py主要实现了对?络模型的定义
#提取多尺度的上下?信息的模型定义
class ContextualModule(nn.Module):
#我们使?S = 4个不同的尺度,对应的块??k(j)∈{1,2,3,6},因为它?其他设置表现出更好的性能。
#features是指每个输?样本的??;out_features是指每个输出样本的??;sizes是指尺度??
def __init__(self, features, out_features=512, sizes=(1, 2, 3, 6)):
super(ContextualModule, self).__init__()
self.scales = []
self.scales = nn.ModuleList([self._make_scale(features, size) for size in sizes])
#bottleneck 的作?还是?更合理的?法减少了参数的数量,同时在尽可能不删除关键的特征的情况下
#nn.Conv2d(in_channels, out_channels, kernel_size)作为?维卷积的实现;features*2是指输?张量的通道数;kernel_size是指卷积核的??为1*1
self.bottleneck = nn.Conv2d(features * 2, out_features, kernel_size=1)
#nn.ReLU()为激活函数,也是卷积层
self.relu = nn.ReLU()
#每个这样的?络输出?个特定?例的表单权重图
self.weight_net = nn.Conv2d(features, features, kernel_size=1)
#计算预测权值w的函数
def __make_weight(self, feature, scale_feature):
#原?中给出的对?特征的计算公式:C_j = S_j - f_j,就是计算出对?特征
weight_feature = feature - scale_feature
#Sgimoid函数即形似S的函数,也成为S函数。在机器学习中经常?作分类
#sigmoid函数来避免除0
#使?self.weight_net()来进?步学习尺度感知特征的权值
return F.sigmoid(self.weight_net(weight_feature))
#计算尺度
def _make_scale(self, features, size):
#nn.AdaptiveAvgPool2d()?适应平均池化函数
prior = nn.AdaptiveAvgPool2d(output_size=(size, size))
#?维卷积
conv = nn.Conv2d(features, features, kernel_size=1, bias=False)
#nn.Sequential()?个有序的容器,神经?络模块将按照传?构造器的顺序依次被添加到计算图中执?,
return nn.Sequential(prior, conv)
#反馈给后端?络
def forward(self, feats):
h, w = feats.size(2), feats.size(3)
#?适应处理,学习计算尺度
multi_scales = [F.upsample(input=stage(feats), size=(h, w), mode='bilinear') for stage in self.scales]
#根据?适应处理得到得到尺度来计算权值
weights = [self.__make_weight(feats, scale_feature) for scale_feature in multi_scales]
#利?权值来计算上下?特征(原?的公式(5))
overall_features = [(multi_scales[0]*weights[0]+multi_scales[1]*weights[1]+multi_scales[2]*weights[2]+multi_scales[3]*weights[3])/(weights[0]+weights[
1]+weights[2]+weights[3])]+ [feats]
#进?卷积处理
bottle = self.bottleneck(torch.cat(overall_features, 1))
return self.relu(bottle)