ժ Ҫ
�߷ֱ���ң��Ӱ����а�����Ϣ����,��Ȼ�������ӵ��ص�,һ��ң��Ӱ�����������������Ľ�������ء�ֲ����ũ��ȶ�������͵�òҪ����Ϣ,������ø߸�Ӱ����ʵʩ�����ٵĵ���Ҫ���Զ��������ȡ,һֱ�������ȵ���о�����,�������ѧϰ�����Ŀ��ٷ�չ,������ھ����������Ŀ����ģ�ͱ�Ӧ�õ���ң��Ӱ��Ŀ����������,ȡ���˲����ijɹ�����ĿǰΪֹ,����ң��Ӱ��Ŀ����ģ�ʹ���������εĽṹ�Լ����ӵ�����ͨ��,����ģ��ͨ����ռ�ýϴ��ڴ��ͬʱ,���й����л�Ҳ����������ļ����������Ͷ������,������ģ�������������Դ���ij����²����ʹ�á�
�ؼ��� ң��Ӱ��;Ŀ����;����������;����ѧϰ
����
ң��Ӱ���зɻ�����ֻ�Լ�������̲�͵���ļ� �ⲻ���ں��������Ϣ�о�������һ����Ҫ��Ӧ�÷� ��, �����ù�ҵ����Ҳͬ����������Ҫ������. ������ ��Ŀ��, ��Ҫ�������������ں��桢�������汳�� �¶�ͼ���еĴ�ֻ����̲�������Լ������еķɻ��� ��λ�ñ�ע����Ĥ�ָ�. ���ɻ��ʹ�ֻͼ���ڳ߶ȡ� �ֱ���������Ȼͼ����ڲ���, ��̲�͵���Ҳ����Ϊ �������ʹ��ʶ��Ч��������. ��Ը߷ֱ���ң��ͼ����Ŀ��̫С��ʶ�����벻 ����������Ӱ��ģ��������, ���������һ�ֻ���ע �������ƺ����ɶԿ������ģ�� Attention-GAN-Mask R-CNN ��� AG-Mask R-CNN, ��ע���������ɶԿ� ����[1] �� Mask R-CNN[2] �������. ���ĵ���Ҫ�о��� ��Ϊ: (1) ���������Ŀ��߶Ȳ�ͬ, ��չ��߶����� �ں��о�. ��Զ�߶ȵ�����, �������������������� ���������� (FPN)[3] . (2) ���ң��ͼ���ж���ռ�Ƚ� С, ���ױ�©�������, ��չע���������㷨�о�. �� ��ע��������, Ƕ���ھ�����������, ����ע������֪ ������, ʹ�������ע����Ҫ������, ������������ľ���. (3) �� Mask (����) ��֧���������ɶԿ�����. ���� Mask ��֧�����������ɶԿ������е��������� ����ͬ, ������õ��������ɶԿ������ Mask ��֧�� Mask �����������Ԥѵ��, �Ӷ�����ԭʼ Mask ��֧ ���������ľ���. (4) ģ�͵�ѵ��������. ���ģ�͵� ѵ�����������֤����, �����ʼ Mask R-CNN ���� ����������������жԱ���˵��ģ�͵Ŀ����Ժ�Ч��.
1 ����Ԥ����
ң��Ӱ��ɼ����˹�����ǽ���ĵ����Ʒ��ʶ��ģ�͵Ļ�����������Ҫ����ң��Ӱ��ͼ�����ݼ��Ĺ������̡�
1.1 ���ݲɼ�
UCAS-AOD Dataset ��һ��ң��Ӱ�����ݼ�,����������ͷɻ�����Ŀ���Լ������������������ݼ��ɹ��ƴ��� 2014 ���״η���,���� 2015 �겹��,��������С�Orientation Robust Object Detection in Aerial Images Using Deep Convolutional Neural Network����
��ͬͼ��Ҫ�ص��������1��ʾ��
��1 ��ͬͼ��Ҫ�ص�����

(a) ����Ӱ��

(b) �ɻ�Ӱ��
ͼ1. �����ͷɻ�ң��Ӱ���ʾ��ͼ��
1.2 ͼ��ָ�
ͼ��Ԥ��������ͼ��ָ�
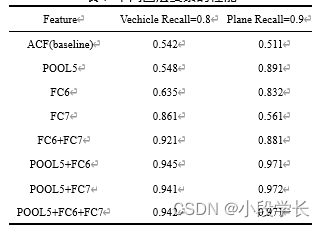
�����õ���Ⱦ���������(AlexNet)�Ľṹ������ʹ�� POOL5��FC6 �� FC7 ͼ������,��ߴ�ֱ�Ϊ 9216��4096 �� 4096��

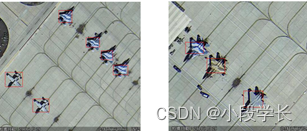
Ϊ�������Ⱦ���������ģ�͵ķ�������,��ÿ��ң��Ӱ��ͼ��ͨ����ת��ƽ�ơ�Ť�������š���ת�ȴ�ͳ����ͼ����������������任������������������Գ����ͷɻ���ͼ�����������ǿ��IJ���������ͼ2��ʾ,ͨ��ͼ��ָ��ң��ͼ�����ͼ��Ԥ����,��ƽ�淽��ķֲ��̶Ƚ���ͳ��,����������Ҫ��ͼ��
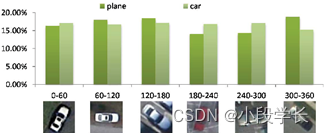
ͼ 2 �����ͷɻ�ƽ�淽��ķֲ��̶�

2 ����ģ��
2.1 ����ṹ
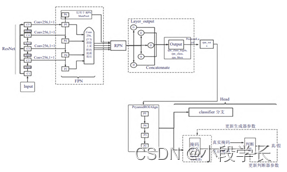
AG-Mask R-CNN ģ�͵�����ṹ��ͼ 1 ��ʾ. (1) ��ң�����ݽ���Ԥ������Ϊ����. (2) �Ǹ�������� ResNet101[4] , ������ ResNet �� ����֮��Ƕ��ע����ģ���Լ���������������, �Դ� ����ǿ��СĿ���������ȡ�ͼ�⾫��. ע����ģ���� ͼ 2 ��ʾ, �����ȼ���ͨ����ע�����ټ���ռ���ע �����ķ�ʽ, �ھ������ÿһ������֮�䶼Ƕ��һ�� ��װ�õ�ע����ģ��. (3) ���� Mask R-CNN ��ģ�ͼܹ�, ��� Mask �� ֧���иĽ�, �� Mask �������������ɶԿ���������Ԥ ѵ��. ��ʼ�����Ƕ�����ͼ�����������Ϣ���б��� ���ں�, ��������� CNN[5] ģ��䵱������ȡ����, ������ͼ�����������ȡ, ��������ͼ. FPN ��Ҫ�Ǽ� �ٳ߶ȱ任���. ֮���ѡ������������ (RPN) ���� Ԥ�����к�ѡ������Ƽ�, �������ɸѡ�������� �ع�������ͼ.
3 ʵ��
ң��ͼ��ɻ�Ŀ������ʶ����һ���dz�ֵ���о��Ŀ���,ͬʱҲ��һ��ӵĹ���,��ؼ�������Ӱ��ʶ���㷨���ӵĻ�ʯ���������Ȳ���ʶ���㷨�е�Ԥ����;Ȼ����ϸ���ܷɻ�ʶ���������ʶ��;������Ӱ���㷨���ӵ�Ӱ�����غ�����ʶ���㷨���ܵij���ָ�ꡣ
3.1 ʵ������
����ɷɻ�ʶ��ʱ,������ζ���о������Ѿ�����,����Ҫ���㷨������Ч�������ܽ��з����������ж��ԺͶ����������ַ�ʽ,���Է���ֻ�ܴ��ԵĽ�ʾ�㷨������,����������ȷ�ĸ����㷨Ч���ľ�����ֵ,��˶��㷨����������Ϊ��Ҫ,ͬʱҲ�Ǻ�ǰ�˵ķ����Աȵ���Ҫ�������ݡ����������㷨�����ľ����Ժ�ң��ͼ��ĸ��������ڶ���������غͿ�ԭ��,��������ң��ͼ��ɻ�ʶ���г��õı������۱��������㷨�Ķ�������,��Щָ�����:1)�����;2)ʶ����;3)�龯�ʡ�����������ڵ�ʵ������,ʱ��Ҳ��һ�����ǵ�����,�����ʱ�伴Ϊ��ɷɻ�ʶ�����ĵ�ʱ�䡣�ڱ�֤ʶ���ʵ�ͬʱ,��Ȼ�����ĵ�ʱ��Խ��Խ��,������ʵʱ�Ե�Ҫ�����Խ��Խ����
3.2 ʵ����
3.2.1 ���ʵ����
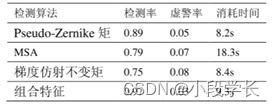
�ɻ�ʶ���㷨�����ܰ����ɻ��ļ���ʡ�ʶ���ʡ��龯�ʡ��ۺ�����ָ��z������ʱ�䡣����ʺ�ʶ���ʲ�������[21]�ķ�������,�龯�ʲ�������[20]�ķ������㡣Z�Ǹ��ݼ���ʺ�ʶ���ʶ����һ���ۺ�����ָ��,,���ۺ������˷ɻ�ʶ���㷨�����ܡ�����ʱ����ָ��ң��ͼ����ʶ������зɻ�Ŀ�������ѵ�ʱ�䡣Ŀ��ʶ������ָ���������ɻ�ʶ���㷨������,����ָ������������ʵ��ͼ������Google Earth 7.0.2,�ֱ���Ϊ0.61m������ͼ���Ǵӹȸ��ͼ��ȡ�IJ�ͬ���������ú;��û�����ң��ͼ���е������ɻ�Ŀ��ͼ��ͱ���ͼ��,���Ƚ�����8�ַɻ�����300���ɻ�ͼ����40������ͼƬ,����Photoshop ����8��ͼ��ĻҶȱ任���˹���ģ����ձ仯��Ӱ��,���յõ�160��ͼƬ��
��3. �㷨�Ƚ�
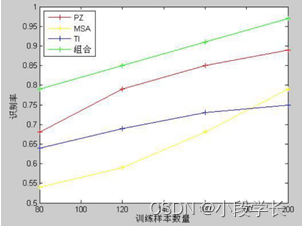
ͼ4 ��ͬ������ʶ������Ӱ��

ͼ5 �ı�ʶ��ɻ���
ͼ6 �ɻ�ʶ�����
3.2.2 �Ż��㷨���������Ӱ��
���㷨����ʶ��8�ַɻ�Ŀ��,�����Dz�ͬ��������ͬ�����ķɻ������,���㷨����ʶ�����ͬ�����IJ�ͬ�ķɻ�����,ͬʱ�ܿ˷���ͬ�����ͺ��ձ仯��Ӱ�졣

ͼ7 ���û���ͼƬ ͼ8 ���û���ͼƬ

ͼ9 ���߽Ϻ�ͼƬ ͼ10 ���߽ϰ�ͼƬ

ͼ11 ���ӱ���ͼ�� ͼ12 ����ͼ��
ͼ13��ͬ����ͼ�� ͼ14 ��ͬ��ɫͼ��
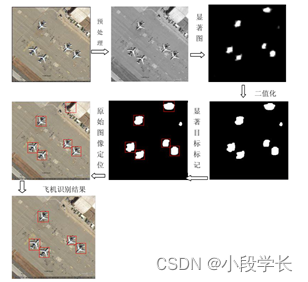
�ڴֶ�λ��,�������øĽ�������ͼ�㷨������ȡң��ͼ���д��ڵ�����Ŀ��,Ȼ���û��������������߱�ǵ��·�����ȷ������Ŀ��Ĵ�С��λ��,������Щ����Ŀ����Ϊ��ѡĿ��,Ϊ����ʶ�����������ھ�ʶ���,������ȡ��ѡĿ�������ͼ���MSA��Pseudo-Zernike�غ� Harris-Laplace����������,��ȡ����������������ȫ�������ɻ�Ŀ��Ķ�����Ϣ,��һ���̶��Ͽ˷��˵�һ��������Ŀ����Ϣ�����ȱ��;Ȼ����������������ں�;���ʹ��SVM����ѵ��ʶ��,�жϸú�ѡĿ���Ƿ�Ϊ�ɻ�Ŀ���Լ��ɻ�Ŀ������ࡣ
2 ����
ң��ͼ��ɻ�Ŀ������ʶ�������ǶԾ��û��Ƕ������������ŷdz���Ҫ������,����ѳ�Ϊ������Ӿ������о����ȵ���ص㡣�����Ժ���Ƽ����»�����Ŀ��ʡ������������Ŀ�����ڳ߶ȿռ������Ķ����Ŀ��ʶ������ٹؼ������о���Ϊ�о�Ŀ��,���Ĺ������������,��������㷨��ʱ��,������������Լ�ʵʱ�Ե�Ҫ��ȼ�������o����˻�������ͼ�Ͷ�������ϵķɻ�ʶ���㷨�����ʶ�ȡ�ͬʱ���ٺ�ʱ�ȼ�������,����Ҳ�˷��˹��ձ仯��Ӱ��
�� �� �� ��
[1] .https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CJFD&dbname=CJFDAUTO&filename=XTYY202206020&uniplatform=NZKPT&v=Jzk-Nu39AISiDTc9Nf7pyFivQafsAq17eQ5OHaGlluc3M37PPKz5oeQl0ewP_G-B
[2]https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CJFD&dbname= CJFDLAST2022&filename=BJCH202202014&uniplatform=NZKPT&v=Jzkab8RbFN0tzLyzdoO3JNbQwjpbCmX8EOzVjm08oTCQFI9P895A-HoBB6o0-L8e
��ӭ��Ҽ����Ž�������(�뱸עcsdn������)
