目前关于自动驾驶数据集你想知道的,应该都在这里了,这是「整数智能」自动驾驶数据集八大系列分享之系列三:
「本期划重点」
-
Road Marking数据集是专门为为评估道路标线检测和识别的性能而设计的数据集,几乎包含了美国道路上所有常见的标记
-
Unsupervised Llamas数据集是是最大的高质量车道标记数据集之一
-
由卡尔斯鲁厄理工学院发布的KITTI Road数据集是目前自动驾驶领域最重要的测试集之一,KITTI主要针对自动驾驶领域的图像处理技术,主要应用在自动驾驶感知和预测方面,其中也涉及定位和SLAM技术
「八大系列概览」
自动驾驶数据集分享是整数智能推出的一个全新分享系列,在这个系列中,我们将介绍目前为止各大科研机构和企业推出的所有公开自动驾驶数据集。数据集主要分为八个系列:
-
系列一:目标检测数据集
-
系列二:语义分割数据集
-
系列三:车道线检测数据集
-
系列四:光流数据集
-
系列五:Stereo Dataset
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
01「 Unsupervised Llamas 」
-
发布方:BoschN.A.Research
-
下载地址: https://unsupervised-llamas.com/llamas/
-
论文地址: https://openaccess.thecvf.com/content_ICCVW_2019/papers/CVRSUAD/Behrendt_Unsupervised_Labeled_Lane_Markers_Using_Maps_ICCVW_2019_paper.pdf
-
发布时间:2019年
-
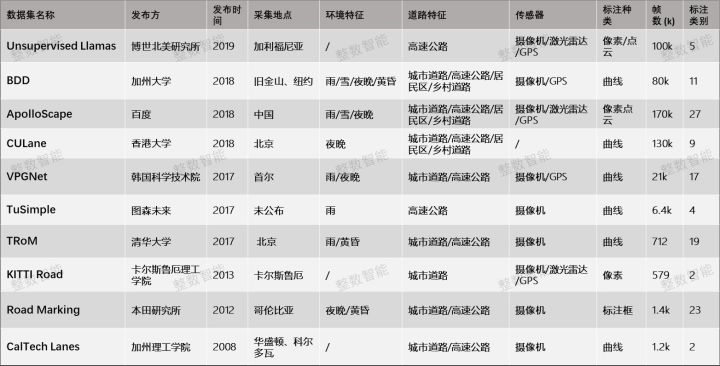
简介:该数据集是最大的高质量车道标记数据集之一,通过该数据集,发布方提供了一个基准和基线
-
特征
-
包括100,042张有标签的车道标记图像,来自约350公里的驾驶记录
-
生成标记图像的管道利用自动创建的地图将标记投射到相机图像中,并依靠优化程序来提高标签的准确性
-
包含像素级的虚线标注,每个标记的二维和三维端点以及连接标记的车道关联
02「BDD」
-
发布方:加州大学伯克利分校
-
下载地址: https://bdd-data.berkeley.edu/
-
论文地址: https://arxiv.org/pdf/1805.04687.pdf
-
发布时间:2018年
-
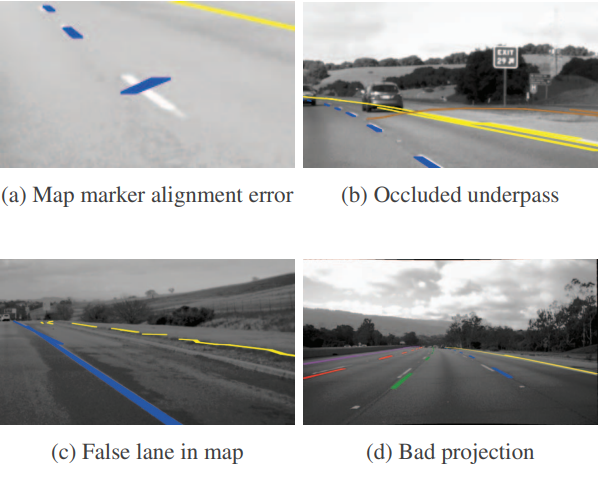
简介:这是当时用于计算机视觉研究的最大,最多样化的开放式驾驶视频数据集。此外该数据集也适用于行人识别,因为它包含的行人实例比此前的专用数据集还多
-
特征
-
数据集从每个视频的第 10 秒采样一个关键帧,并为这些关键帧提供注释
-
它们在多个级别进行标记:图像标记、道路对象边界框、可驾驶区域、车道标记和全帧实例分割
-
这些注释可以帮助了解不同类型场景中数据和对象统计信息的多样性
03「ApollpScape」
-
发布方:BoschN.A.Research
-
下载地址: http://apolloscape.auto/scene.html
-
论文地址: https://arxiv.org/pdf/1803.06184.pdf
-
发布时间:2018年
-
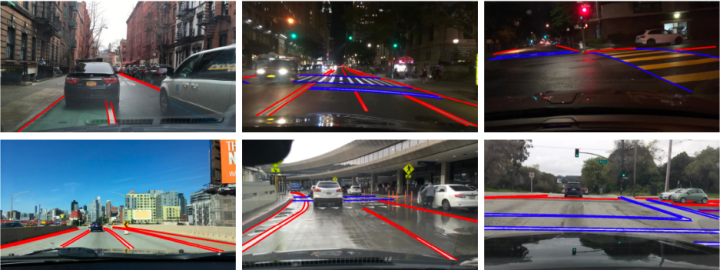
简介:百度阿波罗数据集包括轨迹预测、3D 激光雷达目标检测和跟踪、场景解析、车道语义分割、3D 汽车实例分割、立体和修复数据集等
-
特征
-
车道语义分割:110,000多帧的高质量的像素级语义分割数据
-
3D物体检测和追踪数据集:在中国北京的各种照明条件和交通密度下收集
04「CULane」
-
发布方:香港大学
-
下载地址: https://pan.baidu.com/s/1KUtzC24cH20n6BtU5D0oyw#list/path=%2F
-
论文地址: https://ojs.aaai.org/index.php/AAAI/article/view/12301
-
发布时间:2018年
-
简介:这是一个大规模的具有挑战性的数据集,用于交通车道检测的学术研究
-
特征
-
由安装在北京六辆由不同司机驾驶的不同车辆上的摄像机收集
-
采集超过55小时的视频,提取133235帧
-
该数据集被分为88880张图像作为训练集,9675张作为验证集,34680张作为测试集。测试集被分为正常和8个挑战类别
05「VPGNet」
-
发布方:KAIST
-
下载地址: https://github.com/SeokjuLee/VPGNet
-
论文地址: https://openaccess.thecvf.com/content_ICCV_2017/papers/Lee_VPGNet_Vanishing_Point_ICCV_2017_paper.pdf
-
发布时间:2017年
-
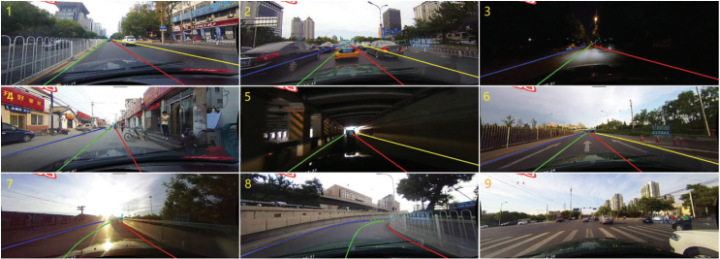
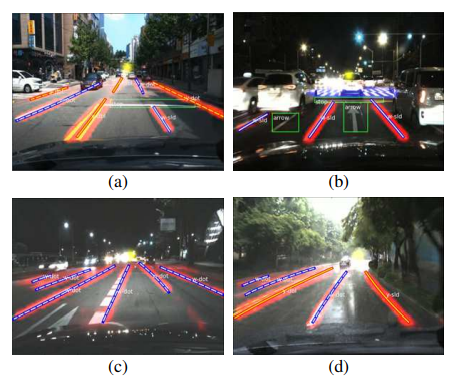
简介:这是一个车道标记检测和识别基准数据集
-
特征
-
包括大约20,000张图像,有17个车道和道路标记类别
-
设计了一个统一的端到端可训练的多任务网络,联合处理车道和道路标记的检测和识别
-
包括白天(无雨,雨,大雨)和夜间这四种情况,在首尔开车的三个星期内拍摄
-
原始视频(30帧)以1Hz的间隔采样,生成图像数据
?06「TuSimple」
-
发布方:TuSimple
-
下载地址: https://github.com/TuSimple/tusimple-benchmark/issues/3
-
论文地址: https://arxiv.org/pdf/2005.08630.pdf
-
发布时间:2017年
-
简介:这是一个车道线识别数据集,由自动驾驶公司Tusimple 对外公开发布,包括raw_file、lanes 和h_samples这三个字段
-
特征
-
每条线实际上是点序列的坐标集合,而不是区域集合
-
车道线实际上不只是道路上的标线,虚线被当作一种实线处理
-
训练集包括3626个视频剪辑,3626个带标注的帧,测试集包括2782个视频剪辑
-
采集条件:中等天气条件, 白天不同的时间, 2车道/3车道/4车道/或更多,不同的交通状况

07「Road Marking」
-
发布方:本田研究所
-
下载地址: www.ananth.in/RoadMarkingDataset.html.
-
论文地址: https://sci-hub.se/10.1109/ivs.2012.6232144
-
发布时间:2012年
-
简介:Road Marking数据集是专门为为评估道路标线检测和识别的性能而设计的数据集,几乎包含了美国道路上所有常见的标记
-
特征
-
该数据集由车载摄像头拍摄的视频组成,视频覆盖在不同的天气、照明和道路条件下,美国加州城市和郊区道路上的场景,几乎包含了美国道路上所有常见的标记
-
数据集中共29段视频,共包含28614个帧、1208个注释过的道路标记

08「TRoM」
-
发布方:清华大学
-
下载地址: https://pan.baidu.com/s/1kVfttC7#list/path=%2F
-
论文地址: https://sci-hub.se/10.1109/itsc.2017.8317749
-
发布时间:2017年
-
简介:TRoM的基准数据集可用于检测交通场景中的可驾驶道路区域和其他关键物体,如障碍物和地标,用于与自动驾驶汽车和ADAS相关的交通场景的语义分割,是高级驾驶辅助系统(ADAS)和自动驾驶汽车的基础
-
特征
-
该数据集包含超过 700个有代表性的场景、19个类别的路标。该数据集可用于检测城市场景中的路标类别,涵盖了时间、天气和交通负荷的全部范围,并通过注释工具包促进丰富数据集的内容
-
TRoM的目标是辨别路面上的路标,其他物体如行人和机动车则不被识别
-
该数据集包含RGB彩色图像,分辨率为 1280×960像素。该数据集采用了三部分组成的分割模式 部分:训练数据集、验证数据集和测试数据集

09「KITTI Road」
-
发布方:卡尔斯鲁厄理工学院
-
下载地址: http://www.cvlibs.net/datasets/kitti/
-
论文地址: https://openaccess.thecvf.com/content_cvpr_2018_workshops/papers/w14/Smolyanskiy_On_the_Importance_CVPR_2018_paper.pdf
-
发布时间:2013年
-
简介:KITTI Road是目前自动驾驶领域最重要的测试集之一,KITTI主要针对自动驾驶领域的图像处理技术,主要应用在自动驾驶感知和预测方面,其中也涉及定位和SLAM技术
-
特征
-
该数据集场景包含卡尔斯鲁厄城市道路和农村地区,每张图像最多可显示 15 辆汽车和 30 名行人
-
KITTI Road是道路和车道估计基准,由289个训练和290个测试图像组成。它包含三种不同类别的道路场景: * uu - 城市无标记 (98/100) * um - 城市标记 (95/96) * um - 城市多个标记车道 (96/94) * 城市

10「CalTech Lanes」
-
发布方:加州理工学院
-
下载地址: http://www.mohamedaly.info/datasets/caltech-lanes
-
论文地址: https://arxiv.org/pdf/1411.7113.pdf
-
发布时间:2008年
-
简介:该数据集由加州理工学院为验证更加鲁棒的车道线检测算法而制作,采集地点为城市街道。在此之前的车道线数据大多在公路上采集,相比之下在城市街道中的车道线识别会更有挑战
-
特征
-
加州理工学院车道数据集包括四个片段,这些片段在一天中的不同时间在加利福尼亚州帕萨迪纳的街道上拍摄
-
存档包含1225个单独的帧,这些帧是从安装在Alice上的相机拍摄的,此外还有标记的通道
-
数据集分为四个单独的剪辑:cordova1(250 帧)、cordova2(406 帧)、washington1(337 帧)和 washington2(232 帧)
