 ?
?
图片来自网络
摄影|网络
#1?寻找点集的边界意义
自动驾驶碰撞检测中,对于其他交通参与者可以使用bounding_box的方式表示(类似于图像视觉中使用一个 [盒子]?将对象框起来)。
不同的障碍物占用的区域就是轨迹的不可行区域,对于激光雷达这类感知系统,形成的是一系列点云。
那么点集如何描述生成最优的边界呢?本文介绍一下三种常见的方式。
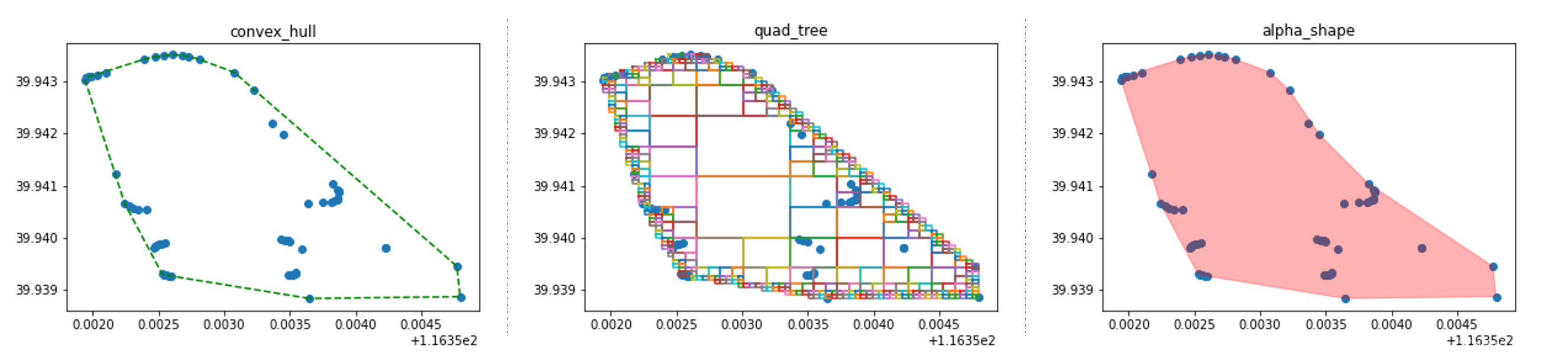
?三种不同的点集边界生成方式
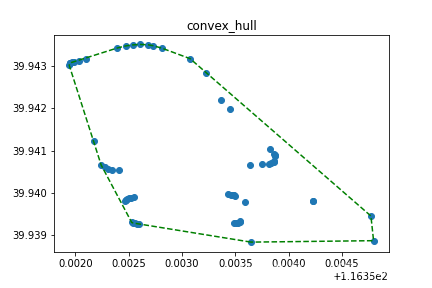
#2?凸集(convex_hull)
凸集(convex_hull)是比较常用的一种产生点集的外边界方法。其主要步骤就是找已有的线段沿某个固定方向旋转,首先碰到哪个点,哪个点就加入外边界的集合。

?凸集算法示意图
①对于一系列点,首先找到这些点最上面(二维情况下就是y值最大)的点1,然后水平正方向拉一条射线。
②然后遍历剩下的每个点,沿着顺时针方向找到与①中射线夹角最小的点2。
③以点2作为新的起点,沿着顺时针方向找到剩下点中与1-2射线夹角最小的点3。
。。。
以此类推,最终回到点1,则被选中的点就构成了外边界。
多个点集的生成的外边界如下:
?
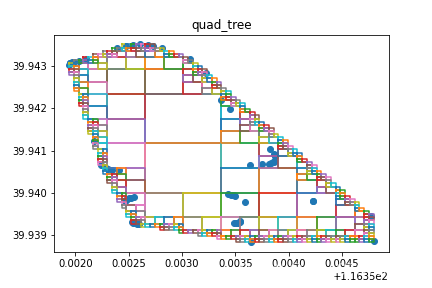
#3?quad-tree四叉树法
四叉树是把外边界等效成一段段直线段,如果线段足够细腻,那可以像素级等效出外边界。
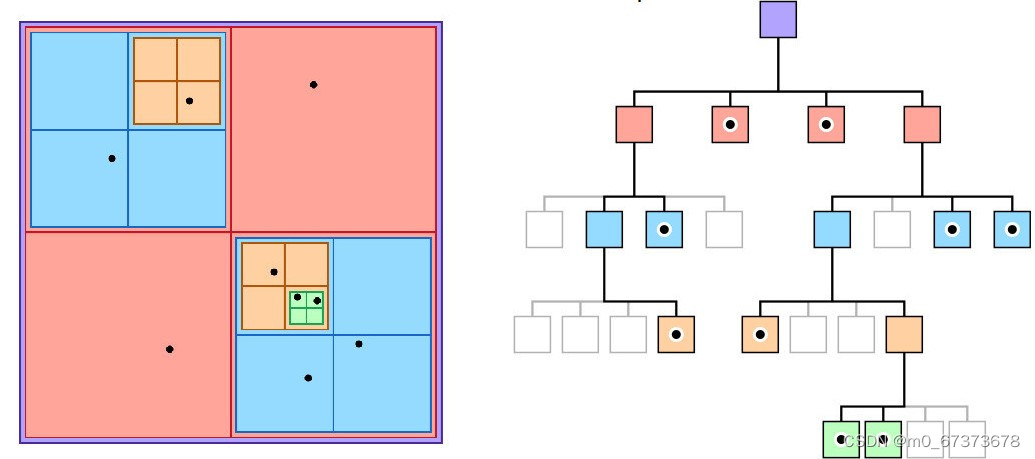
四叉树法示意图
首先找到点集的最左上角的点和最右下角的点,然后把整个矩形四分,得到的矩形又可以无限四分下去。
只要得到的矩形和边界上的点不相交就不在细分下去,否则就一直细分到矩形足够小。
最后得到的矩形的最外围就是我们想要的外边界。
多个点集的生成的外边界如下:
?
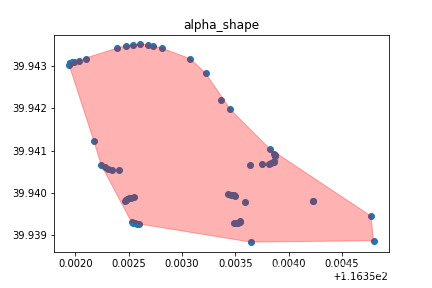
#4?alpha-shape滚球法
凸集主要是射线围绕一个点旋转得到外边界,接下来介绍一种用一个圆(球)在点集上滚动生成外边界的方法:alpha_shape方法。
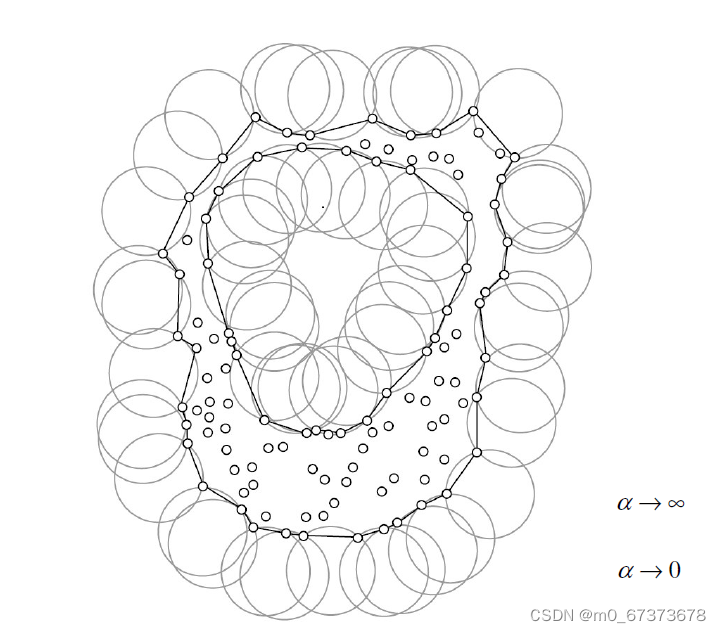
滚球法示意图
我们知道不共线的三点可以决定唯一的一个圆。那么两个点(不重合)加上一个足够的半径也可以构成一个圆。圆心就在这两个点中垂线上。
滚球法就是一个通过指定圆半径(1/alpha),然后看是否能够构成圆来寻找点集的外边界的方法。
多个点集的生成的外边界如下:
#5?总结
其实还有生成凹边界的方法:找到中心点,然后以中心点为圆心,再等分为n(比如n=64)份,每份中找到离圆心最远的点,这些点也可以构成外边界。但是这种方法生成的实在太丑了。
以上介绍的三种方法都可以生成外边界。但是在算法难易程度、需不需要调参、生成效果方面还是有一定区别,实际使用的时候可以根据需要选择合适的方法。
凸集算法比较简单快速,但是生成的结果不够细腻。四叉树算法复杂度比较高,调节的参数较多,但是运行可以很快,结果不太精确,是近似的结果。滚球法算法并不复杂,结果更加细腻,但是需要调参,应用不太具有泛化性。
?感兴趣,可以关注公众号elegantcoin,接受更多消息????
?