目标检测算法分类:
基于深度学习的目标检测算法主要分为两类:
1.Two stage目标检测算法
先进行区域生成(region proposal,RP)(一个有可能包含待检物体的预选框),再通过卷积神经网络进行样本分类。
任务:特征提取―>生成RP―>分类/定位回归。
常见的two stage目标检测算法有:R-CNN、SPP-Net、Fast R-CNN、Faster R-CNN和R-FCN等。
2.One stage目标检测算法
不用RP,直接在网络中提取特征来预测物体分类和位置。
任务:特征提取―>分类/定位回归。
常见的one stage目标检测算法有:OverFeat、YOLOv1、YOLOv2、YOLOv3、SSD和RetinaNet等。
R-CNN (Region Proposal + CNN)
原论文地址:Rich feature hierarchies for accurate object detection and semantic segmentation
步骤:
1 输入测试图像
2 利用选择性搜索Selective Search算法在图像中提取2000个左右的候选区域Region Proposal
3 将候选区域调整为适应AlexNet网络的输入图像的大小227×227,通过CNN对候选区域提取特征向量,2000个建议框的CNN特征组合成网络AlexNet最终输出:2000×4096维矩阵
4 将2000×4096维特征经过SVM分类器(假设20种分类,SVM是二分类器,则有20个SVM),获得2000×20种类别矩阵(图像的所有点积运算都被整合为单个矩阵与矩阵的相乘。特征矩阵通常为2000×4096,SVM权重矩阵为4096×N,其中N为类别数)
5 分别对2000×20维矩阵中进行非极大值抑制(NMS:non-maximum suppression)剔除重叠建议框,得到与目标物体最高的一些建议框
6 修正bbox,对bbox做回归微调
SPPNet
主要思想:
? SPPNet引入一种空间金字塔池化( spatial pyramid pooling,SPP)层以移除对网络固定尺寸的限制。SPP层放在最后一个卷积层之后。SPP层对特征进行池化,并产生固定长度的输出,这个输出再喂给全连接层
针对之前R-CNN的缺点,每个候选区域都进行了卷积操作提取特征,计算量大速度低效。
R-CNN 与 SPPNet模型对比
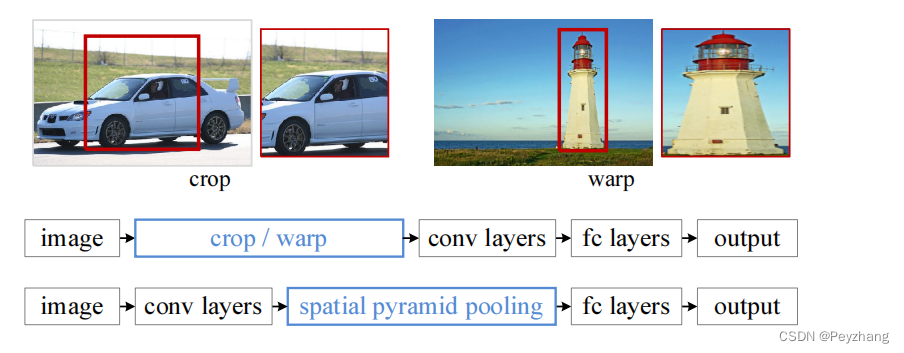
图片来源论文《Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition》
| R-CNN模型 | *SPPNet模型 |
|---|---|
| 1、R-CNN是让每个候选区域经过crop/wrap等操作变换成固定大小的图像 2、固定大小的图像塞给CNN 传给后面的层做训练回归分类操作 | 1、SPPNet把全图塞给CNN得到全图的feature map 2、让SS算法得到候选区域与feature map直接映射,得到候选区域的映射特征向量(这是映射来的,不需要过CNN) 3、映射过来的特征向量大小不固定,所以这些特征向量塞给SPP层(空间金字塔变换层),SPP层接收任何大小的输入,输出固定大小的特征向量,再塞给FC层4、经过映射+SPP转换,简化了计算,速度/精确度也上去了 |
- 候选区域与feature map直接映射
特征图(feature maps)的大小是根据图片的大小与卷积层的卷积核大小(kernel size)与步长(stride)决定的,假设(x′,y′)(x′,y′)表示特征图上的坐标点,坐标点(x,y)表示原输入图片上的点,那么它们之间有如下转换关系,这种映射关心与网络结构有关:(x,y)=(S?x′,S?y′),即
- 左上角的点:
- x′=[x/S]+1
- 右下角的点:
- x′=[x/S]?1
其中 S 就是CNN中所有的strides的乘积,包含了池化、卷积的stride。论文中使用S的计算出来为2x2x2x2=16,在ZF-5结构中。

-
空间金字塔池化( spatial pyramid pooling,SPP)
SPP layer会将每一个候选区域分成1x1,2x2,4x4三张子图,对每个子图的每个区域作max pooling,得出的特征再连接到一起就是(16+4+1)x256=21x256=5376结果,接着给全连接层做进一步处理

图片来源论文《Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition》
Fast R-CNN
提出一个RoI pooling layer,然后整合整个模型,把CNN、RoIpooling、分类器、bbox回归几个模块整个一起训练.(废弃SVM,以及SPP层)
步骤:
1 首先将整个图片输入到一个基础卷积网络,得到整张图的feature map(和SPPNet一样)
2 将选择性搜索算法的结果region proposal(RoI)被池化到固定大小的feature map中
3 RoI pooling layer映射到一个固定长度的特征向量(SPP中使用3个固定长度的特征向量),每个特征会输入到一系列全连接层,得到一个RoI特征向量,其中一个是传统softmax层进行分类,输出类别有K个类别加上”背景”类,另一个是bounding box regressor
4 多任务损失-Multi-task loss,主要使用交叉熵损失加L1损失

Faster R-CNN
SPPnet和Fast R-CNN等研究已经减少了这些检测网络的运行时间,使得区域提出(Selective Search)计算成为一个瓶颈。
在Faster R-CNN中加入一个提取边缘的神经网络,也就说找候选框的工作也交给神经网络来做了。这样,目标检测的四个基本步骤(候选区域生成,特征提取,分类,位置精修)终于被统一到一个深度网络框架之内。主要将SS ----> RPN
- 区域生成网络(Region Proposal Network,简称RPN)
- RPN网络用于生成region proposal
- 通过softmax判断anchors属于foreground或者background
- bounding box regression修正anchors获得精确的proposals
- 得到默认300个候选区域给ROI pooling继续后面fast rcnn的步骤
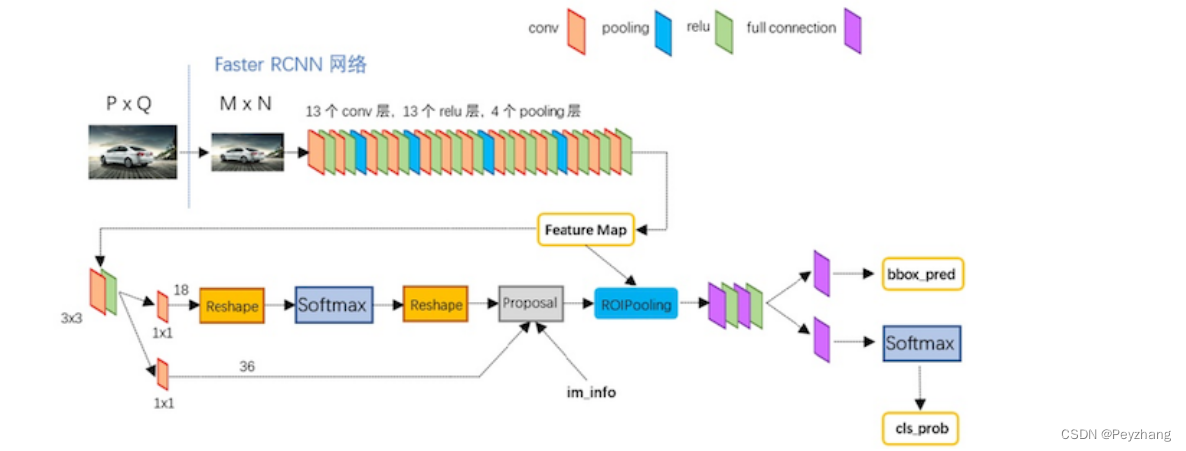
图片来源:《Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks》
开源 keras Faster RCNN 模型
https://github.com/jinfagang/keras_frcnn
参考文献:
《Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition》
《Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks》
?