ЪЕбщЪвгавЛИіРиЩёC16ЕФМЄЙтРзДя,зюНќдкЮвет,ЯыФУРДЭцвЛЭцЁЃБОвтЪЧзівЛИіЪЕЪБЕФМьВт,ЭЈЙ§ROSЛёШЁМЄЙтРзДяЕФМЄЙтЕудЦ,гУpointpillarsФЃаЭРДНјааЪЕЪБЕФШ§ЮЌФПБъМьВтШЮЮёЁЃЕЋЪЧРиЩёc16етвЛИіМЄЙтРзДя,ВЛЬЋКУДІРэ,ФПЧАжЛФмгУздДјЕФЧ§ЖЏ,НјаавЛИіЪЕЪБЕФЯдЪОЁЃЫљвдЯТБпЕФЫМТЗОЭЪЧ,ЯШДцДЂРиЩёc16ЕФЕудЦЪ§Он,дйгУrosНјааШ§ЮЌФПБъМьВтЁЃ
1. ЫМТЗ:
??ЭЈЙ§rosРДЪЕЯжЕудЦЯћЯЂЕФЖЉдФКЭМьВтПђbboxЯћЯЂЕФЗЂВМ,РДЪЕЯжвЛИіМьВтаЇЙћЕФПЩЪгЛЏЙІФмЁЃ
2. ЪЕбщЛЗОГ:
- Ubuntu16.04
- cuda 10.1
- ros-kinetic
МьВтЛЗОГжївЊвРЭаOpenPCDet,ЛЗОГДюНЈПЩВЮПМЮвЕФетЦЊВЉПЭ
3. ВНжш:
1. ЧАЬсЬѕМў
вбОДюНЈЙ§СЫOpenPCDetЁЃ
вбОДюНЈСЫROSЛЗОГ,ЮвгУЕФЪЧkineticАцБО,гУЦфЫћАцБОгІИУвВПЩвдЁЃ
2. БрвыЛЗОГ
ДДНЈвЛИіЙЄзїПеМфВЂНјШы
mkdir -p ~/pointpillars_ros/src
cd pointpillars_ros/src
НЋROSАќИДжЦЛђепПЫТЁЕНЕБЧАЮФМўМаЯТ
git clone https://github.com/BIT-DYN/pointpillars_ros
cd ..
Брвы
# НјШыЕНДюНЈКУЕФopenpcdetЛЗОГ
conda activate openpcdet
pip install --user rospkg catkin_pkg
pip install pyquaternion
# вђЮЊЮвгУЕФЪЧkinetic,ЫљвдашвЊАВзАpcl-ros,вдЩЯАцБОВЛгУАВзА
sudo apt-get install ros-kinetic-pcl-ros
sudo apt-get install ros-kinetic-jsk-recognition-msg
sudo apt-get install ros-kinetic-jsk-rviz-plugins
## зЂвт,жДааcatkin_makeЪБ,дкзюЭтВуЕФЮФМўМаЯТ,вВОЭЪЧЮвР§згжаЕФ~/pointpillars_ros
catkin_make
ЧЈвЦOpenPCDetжаЕФвЛаЉЮФМў
ЮЊБЃЯеЦ№Мћ,ЮвНЋЯТБпетаЉЮФМўШЋВПЗХШыЕНsrc/pointpillars/toolsЮФМўМаЯТСЫЁЃ
ПЩвдЯШаоИФвЛЯТdemo.pyЮФМўЕФХфжУЮФМўКЭдЄбЕСЗФЃаЭЕФЮЛжУ,ВтЪдЪЧЗёФмГЩЙІЕїгУpcdet,ШчЙћПЩвдЕФЛА,ЫЕУїЛЗОГЧЈвЦЙ§РДКѓУЛЮЪЬт,дйГЂЪдаоИФros.pyЕФДњТыЁЃ
аоИФДњТы
ros.pyДњТы
# ЯТБпЕФТЗОЖИФГЩздМКЕФ
sys.path.append("/home/ubuntu/pointpillars_ros/src/pointpillars_ros") # Line 22
# 54ааКѓБп
""" Initialize ros parameters """
config_path = rospy.get_param("/config_path", "/home/ubuntu/pointpillars_ros/src/pointpillars_ros/tools/cfgs/kitti_models/pointpillar.yaml")
ckpt_path = rospy.get_param("/ckpt_path", "/home/ubuntu/pointpillars_ros/src/pointpillars_ros/tools/models/pointpillar.pth")
# ЖЉдФЕФМЄЙтЕудЦУћзж,ИФГЩздМКЕФ,ЮвгУЕФЪЧkittiЕФ.bagЮФМў
self.sub_velo = rospy.Subscriber("/kitti/velo/pointcloud", PointCloud2, self.lidar_callback, queue_size=1, buff_size=2**12)
launch/pointpillars.launchДњТы
<launch>
# жївЊаоИФЯТБпЕквЛаа
<node pkg="rosbag" type="play" name="player" output="log" args="-l /media/ubuntu/ximing/dataset/ros_kitti/bag/2011_10_03/kitti_2011_10_03_drive_0027_synced.bag" />
<node name="pointpillars_ros" type="ros.py" pkg="pointpillars_ros" output="screen"/>
<node type="rviz" name="rviz" pkg="rviz" args="-d $(find pointpillars_ros)/launch/pointpillars.rviz" />
</launch>
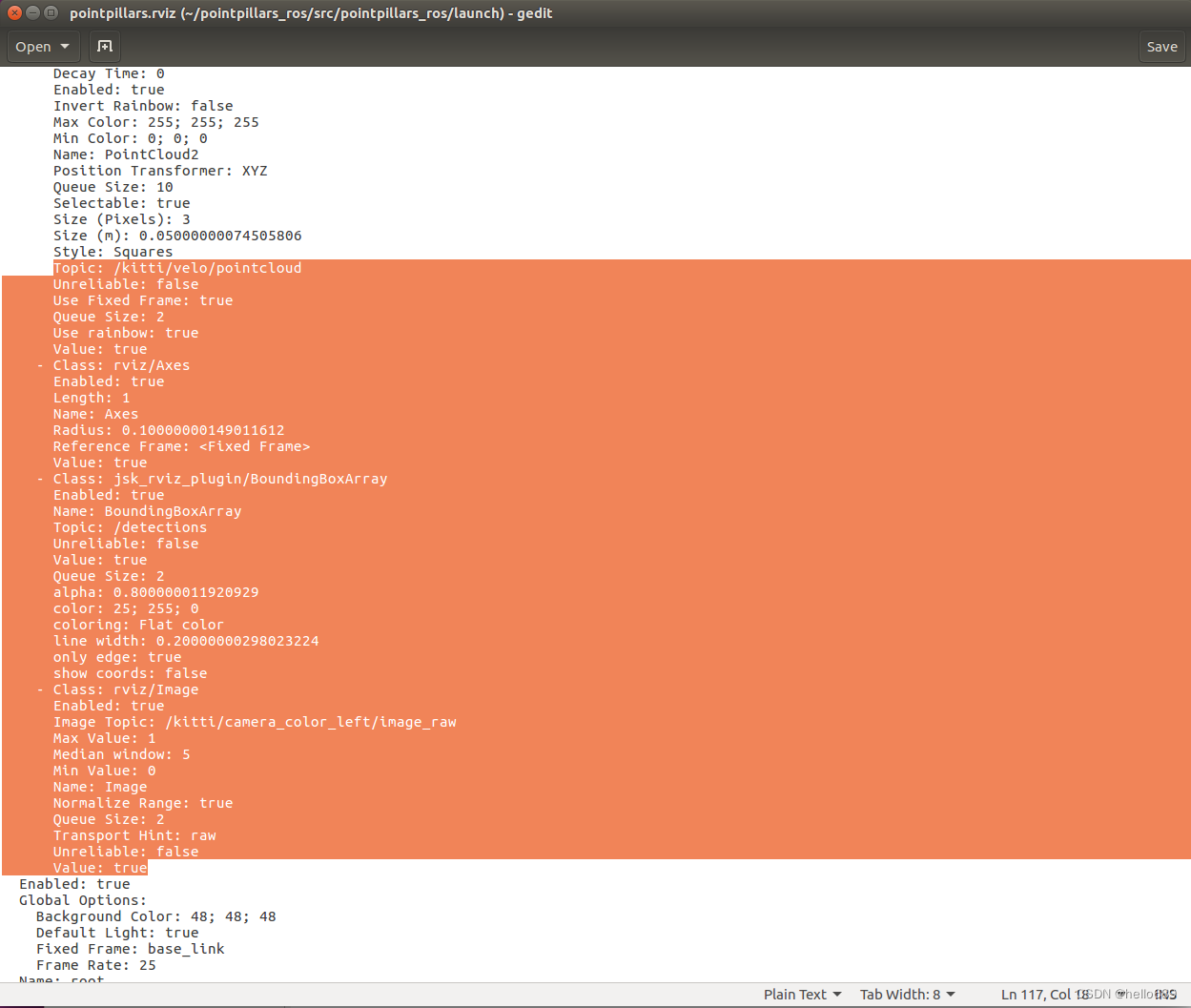
launch/pointpillars.rvizДњТы
жївЊаоИФФуЫљгУЕФЛАЬтЕФУћзж,ЮвИФСЫЕудЦКЭЭМЯёЕФУћзж
3. дЫаа
жДааЯТБпЕФУќСю
conda activate openpcdet
source ~/pointpillars_ros/devel/setup.bash
roslaunch pointpillars_ros pointpillars.launch
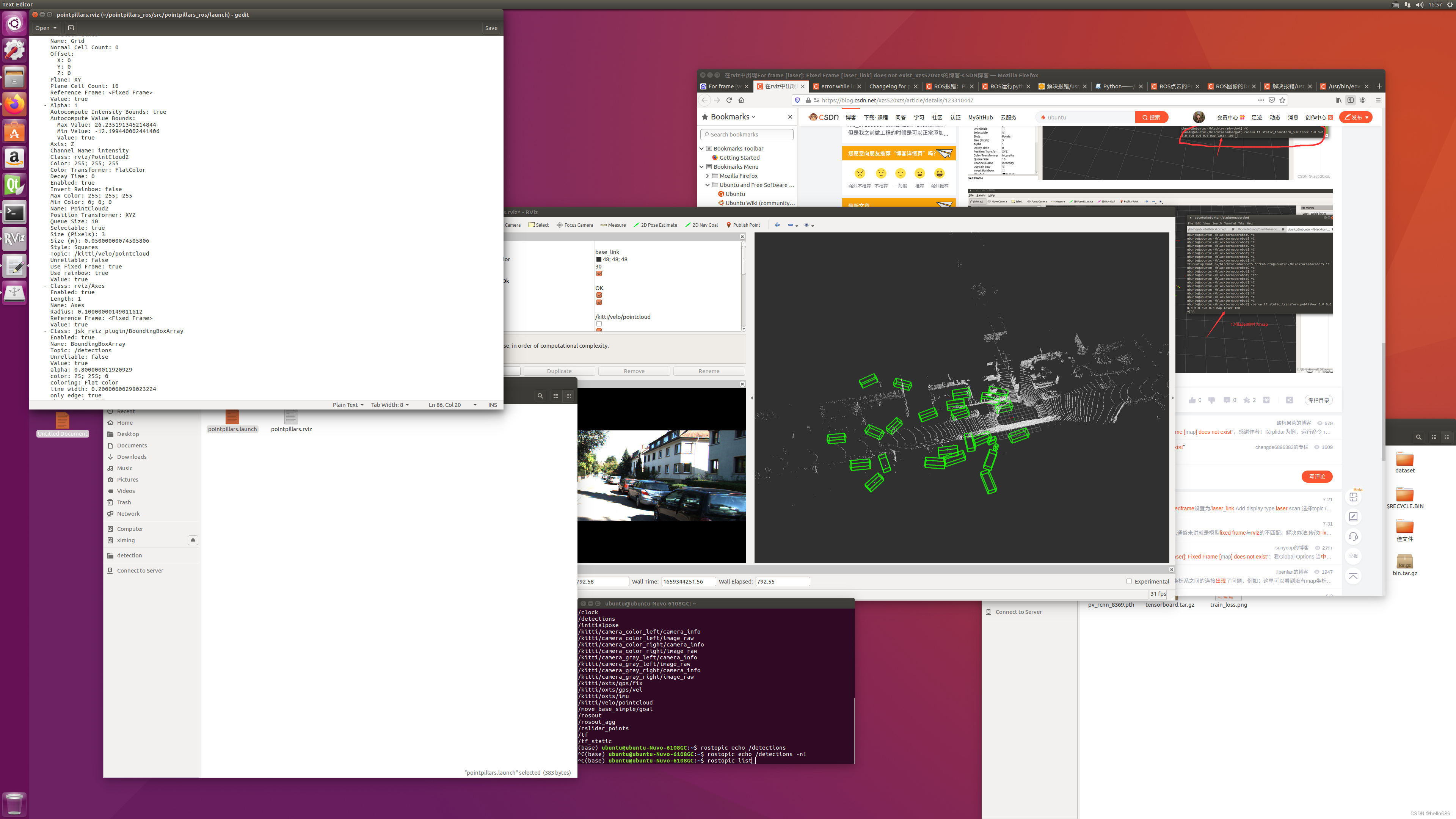
4. ЭМЦЌаЇЙћ:
ЮвЪЙгУkittiдЪ§ОнЕФФГвЛЖЮЪБМф,зЊГЩ.bagИёЪН,гУpointpillarsЕФФЃаЭНјааВтЪдЕФ,аЇЙћвВВЛаа,ВТВтдвђПЩФмЪЧ1.а§зЊОиеѓВЮЪ§УЛгааоИФ;2.МЄЙтЕудЦЯдЪОЕФИњМьВтПђгабгЪБ,ВЛФмКмКУЦЅХф;3.ЕкШ§ЕуПЩФмОЭЪЧФЃаЭВЛаа(ПЩФмадВЛДѓ)ЁЃ
 ЯТЭМЪЧгУРзЩёc16РзДядкЪЕбщЪвВЩМЏЕФ30УыЕФЪ§Он,ВЛЕН1Зжжг,696MBЁЃ
ЯТЭМЪЧгУРзЩёc16РзДядкЪЕбщЪвВЩМЏЕФ30УыЕФЪ§Он,ВЛЕН1Зжжг,696MBЁЃ
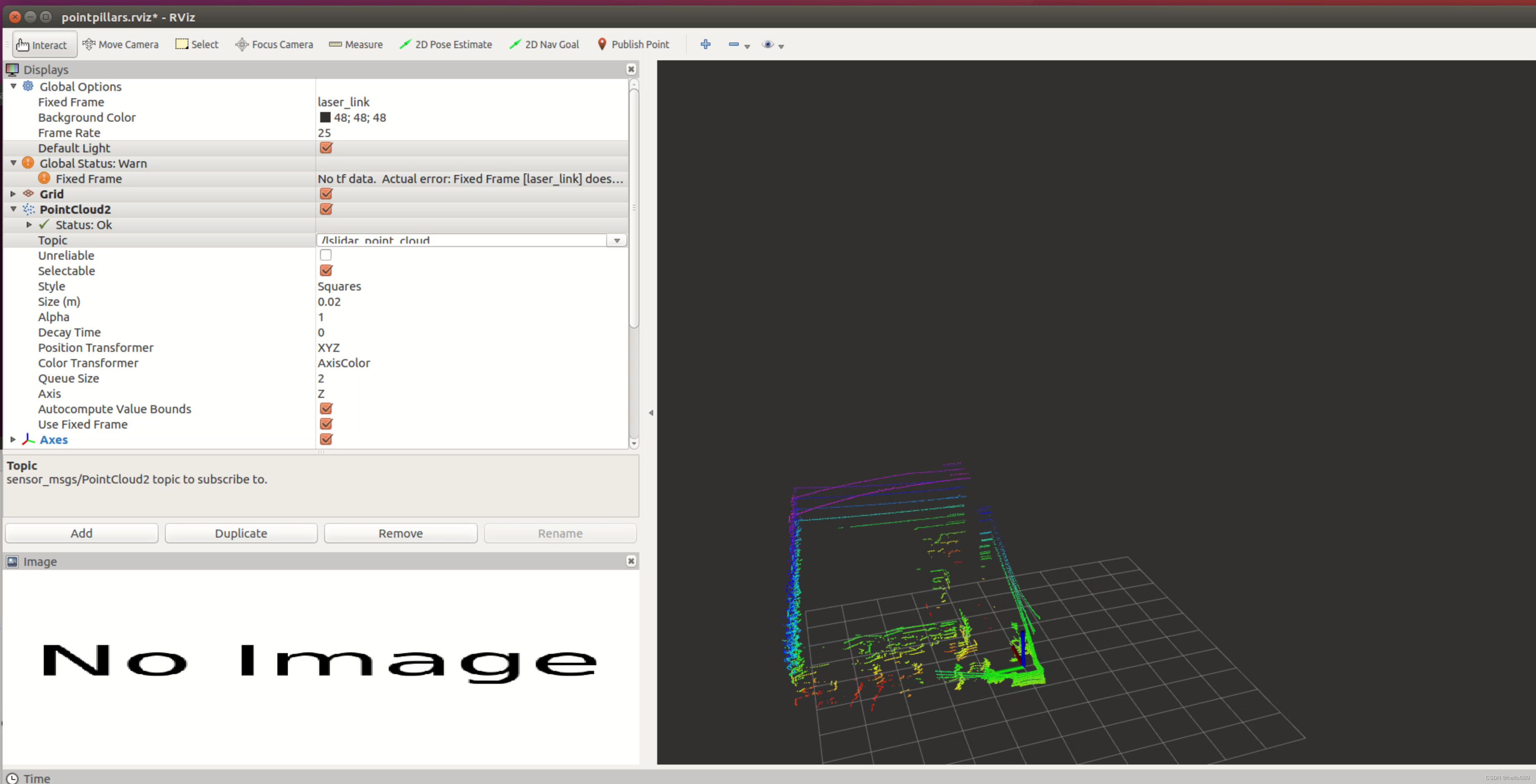
ФПЧАгУrosbag recordДцДЂСЫвЛаЉРзЩёC16МЄЙтРзДяЕФЪ§Он,ЛЙВЛЬЋЛсЪЙгУРзДяЪЕЪБЖСШЁ,ЪЕЪБМьВтЁЃКѓЦкдйЯыАьЗЈАЩЁЃ
5. ЪгЦЕаЇЙћ
6. жївЊВЮПМзЪСЯ:
??ЗЧГЃИааЛетаЉЭјгбЗжЯэЕФПЊдДзЪСЯ,ШУвЛИіаЁАзЕФЮв,вВФмПьЫйdemoГівЛИіаЇЙћЁЃ
гіЕНЕФЮЪЬт,НтОіАьЗЈ: