[LiteratureReview]A survey of image semantics-based visual simultaneous localization and mapping: Application-oriented solutions to autonomous navigation of mobile robots
����:International Journal of Advanced Robotic Systems 2020( IF = 1.714/Q4,���Ǻ� Roboticaһ���ȼ���),Citations:24;������Ҫ���Զ���������ѧ,����һ���Ĵ�����������ѧ����ʦ(��������),���߾�����SLAM�����о��ߡ�
Paper:https://journals.sagepub.com/doi/pdf/10.1177/1729881420919185
����: ����VSLAM����������,����13��,�ο�����117ƪ;(���ȼ������������ŵ�)VSLAM���������ڶ���ͼ������������,���֮��,����VSLAM���higt-level�Ļ�����֪������ЧӦ��λ�˹��ơ��ջ���⡢����3D��ͼ�ȵ�;(��̸̸�Լ��Ĺ���)���Ķ�����VSLAM���µĹ�������������,��Ҫ����:��֪��³���Ժ�ȷ�Եȷ���Ĵ�������,���������:��semantic extractor" �ĸ���͡�modern visual simultaneous localization and mapping���Ŀ��;������Ϊ ��߶ȵ�ͼ��ʾ(multiscaled map representation,��ָ����high-level��map)��ObjectSLAM�������ѧϰ��SLAM�ǽ��ͼ�������ںϵ���Ч������
Note:���»�ע����,2019��10��5�Ž��յ�����,2020��2��23�Ž��շ�����;��RAL��������ʱ������һЩ��
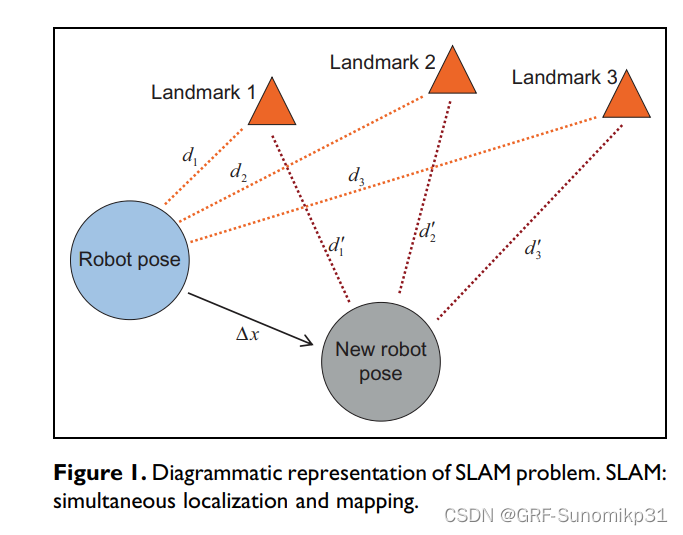
1. Introduction
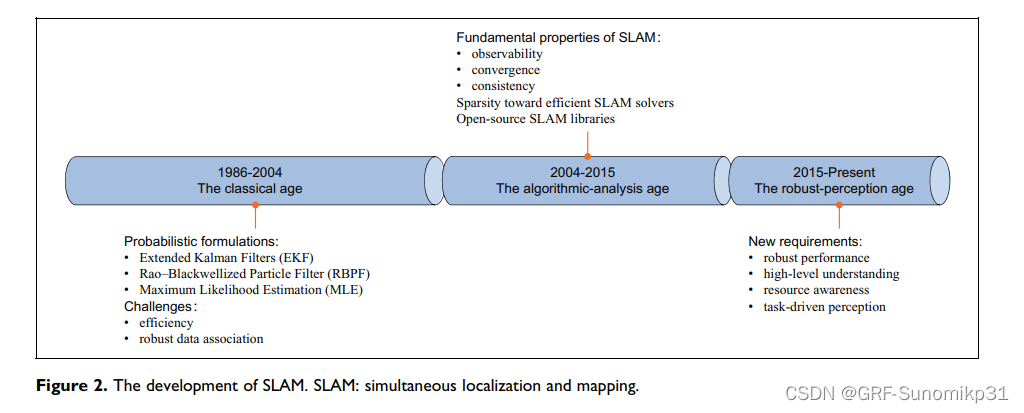
�ò��־���������SLAM��һЩӦ�ó����µ����á�SLAM����ʷ��VSLAM��CV�ںϵ�����;���������16�����ƪTRO"Past, present, and future of simultaneous localization and mapping: toward the robust-perception age"̸̸VSLAM�ڵ������ε��ص㷽��,��ͼ2;Ȼ����˱�1�о���SLAM����Ҫ����;���̸���Լ����µ�outline��
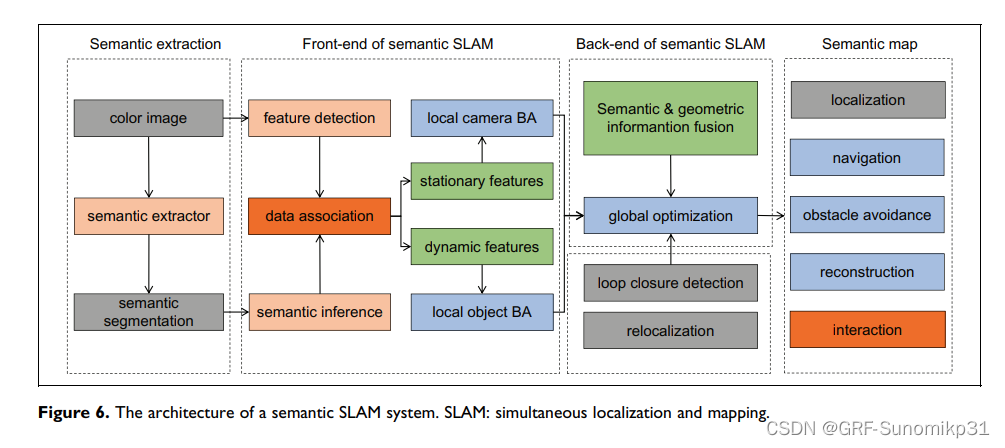
2. The components of a semantic SLAM system
���߽�����SLAMϵͳ��Ϊ����:������ȡ�����ִ�V-SLAM���,����������Ϣ����ȡ��Ϊ:Ŀ����������ָ���
2.1 Semantic extractor
Object detection��Semantic segmentation���,Object detection������;Semantic segmentation��ȡ�������ؼ��ķ���,���ȸ��ߡ�
- Object detection:����̸��2D ��Object detection�ķ�չ,Yoloϵ�е��ٶȿ������䵽SLAMϵͳ��
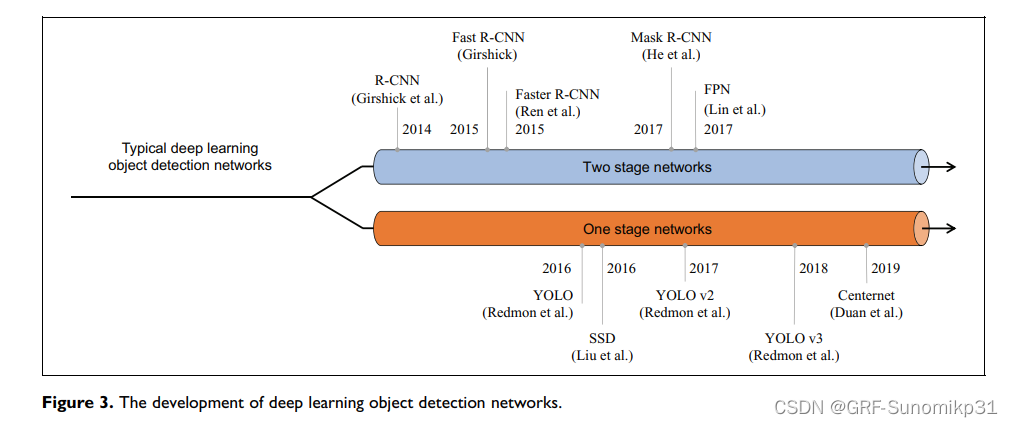
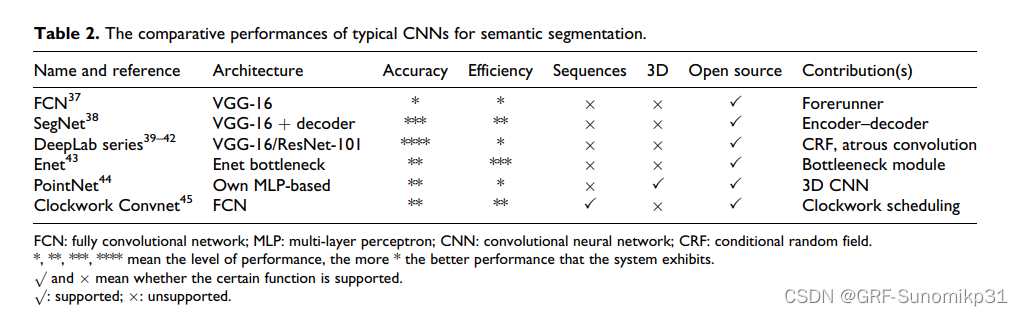
- Semantic segmentation:ͬ�ϡ�
2.2 Modern V-SLAM system
������Ϊ��Modern V-SLAM system����Ϊ���¼�������:
- ���������ݲɼ�:������ָͼ��;
- VO:ͨ��ͼ�������е�����֡�������ƻ����˵���̬��·��λ��;
- ״̬����:����VO�ͱջ�����ṩ���ںϽ����״̬����ȫ�ֹ���;
- �ض�λ:������ʧ�ܻ��ͼ���¼���ʱ���¶�λ;
- �ػ����:ȷ���������Ƿ�ص�֮ǰ��λ�á�
- ��ͼ:����������Ҫ�����ӳ�䡣
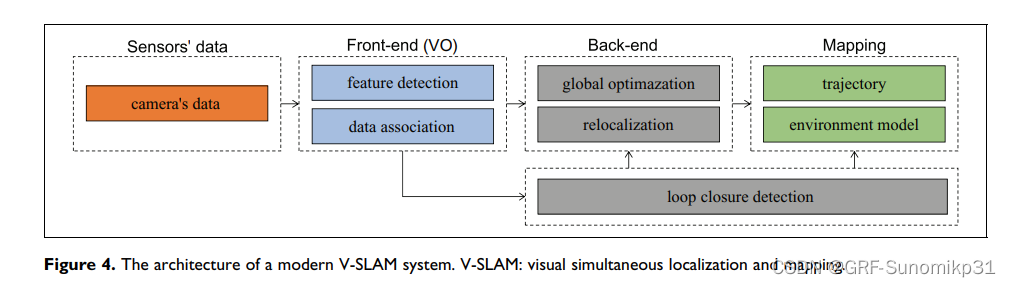
��ѧ��,ǰ������ͺ��������Էֱ����Ϊ�����ݹ���������͡�״̬���ơ����⡣
- ǰ�����ݹ���:���ǽ����˸���ģ������ƥ��IJ�ȷ���ԡ�

- ���״̬����:����������˲��������ڵ��Ż���(BA)��
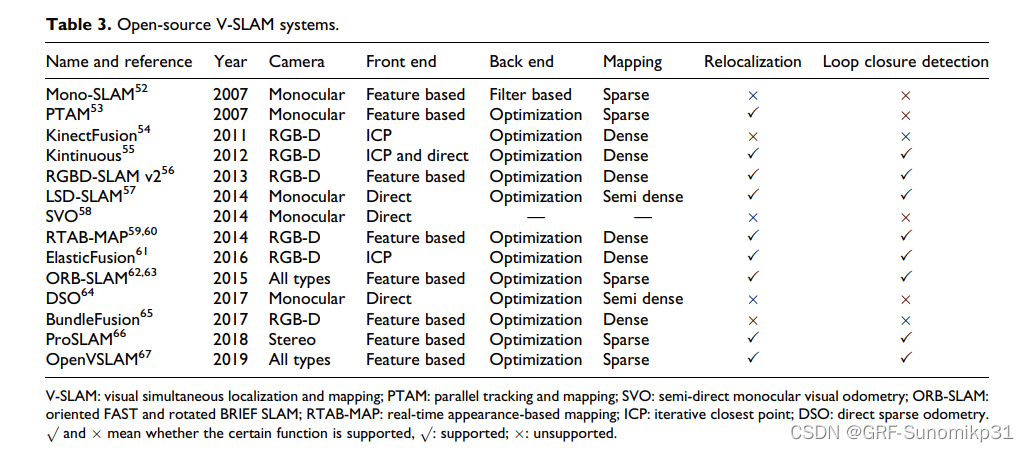
Open-source V-SLAM system :���õ�VSLAMϵͳ:
3. Human�Crobot�Cenvironment interaction: Perception
������Ϊ����SLAM�ĸ�֪Ӧ�ð�����������:���������������;һ��������SLAM��ͼ�IJ��ֹ���

3.1 Semantic map
�����ͼ���Է�Ϊ:object level ��pixel level�� ��һ��ͦ����˼��,��������Ϊ�Ժ�����Ƶ�object level��pixel level���ںϡ�
3.2 Open problems
- Time-varying semantic map:�����ͼ�Գ���³�λ��Ӧ�Խϲ�,һ������Ľ�������ǽ���һ��ʱ������ӳ��,���������������ʱ�չ�ϵģ�͡�
- Panoptic semantic map:����Ұ�������������������including everything visible in one view��;ȫ���ָ� - ͼƬ�ڵ�ÿ�����ض�������� semantic label �� instance id��
4. Environmental adaptation: Robustness
��Ҫ��Ϊ:feature selection mechanism �� optimized data association��
4.1 Feature selection mechanism
�����ᵽSalient DSO�Ĺ���,����������������ȡ������;������Ϣ�صĸ�����ȡ��������;�Լ���̬������ѡ��;
4.2 Optimized data association
data association��Ϊ:���ڵ����ݹ����ͳ��ڵ����ݹ���,���ڵ����ݹ�����Ҫ����tracking,���ڵ����ݹ�����Ҫ���ڻػ���⡣
4.3 Open problems
��������SLAM����ͨ��ѡ���������Ż����ݹ��������VO��³����;�����ᵽCNN��������ȡ����
5. Reliable navigation: Accuracy
���������SLAM���� ������ǿ����,����:��ʼ��������Ż����ض�λ���ػ����ȡ����±���ʾ:
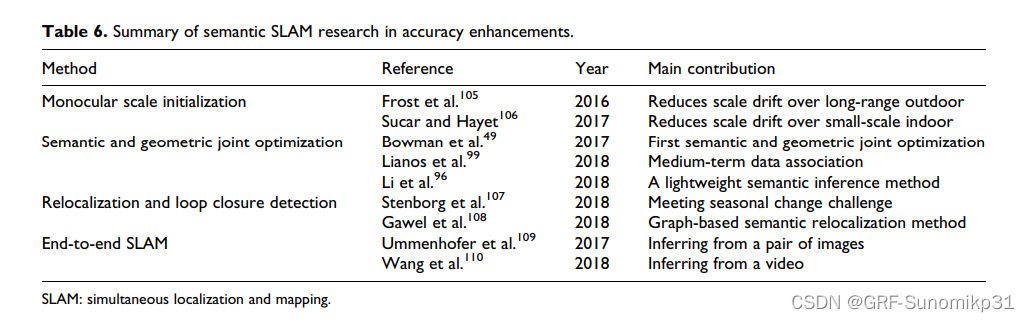
5.1 Monocular scale initialization
����������������ϱ���Ҫ��ͨ��Ŀ����������ʵ�ijߴ���Ϣ��
5.2 Semantic and geometric joint optimization
���ݹ����Ż�;�����ᵽVSO��
5.3 Relocalization and loop closure detection
�ض�λ�ͻػ������Ҫ�ļ�������ͬ��,�����Ż��ķ�����ͬ��
5.4 Open problems
�����ᵽ���ѧϰ�˵��˵ķ���,���ǿɽ����Ժͷ��������
6. Discussions
����������VSLAM��perception��robustness��accuracy ������,�Լ�����һЩ����������; ��һ����ר�Ž��к�۵�����,����:��߶ȵ�ͼ�������SLAM�����ල���ලѧϰSLAM��
6.1 Multiscaled map expression
��Ҳ��һ���Ƚ�����˼�Ļ���,time-scaled maps ��һ������ʱ����Ϣ��4D��ͼ;Multiscaled map expression���ʺϻ����˵ij���������λ��
6.2 Object SLAM
�����о���Object SLAM�ķ���,����SLAM++�����ϵĵ�һ��Object SLAM�ķ���,�����������ķ���:CubeSLAM��QuadricSLAM,����3DĿ�����ڿ��ٷ�չ��
6.3 Weakly supervised and unsupervised learning SLAM
Ŀǰend-to-end��SLAM�������������ݼ��±��ֽϺ�,���Ƿ����Ϳɽ����Խϲ�;���ලѧϰ��һ����Ҫ�о�����,��MonoDepthΪ���ķ�����
7. Conclusion
�ܽ���һ�±��ĵĹ���;���ѧϰ������SLAM(����Ӧ�������ѧϰ��SLAM�Ľ�ϰ�,�������ȡ�����ֵķ���������dl����)�Ľ���ܲ��ɷ֡�