��ʾ:ԭ������
ǰ��
��ƪ���½��Faster R-CNN,������Faster R-CNN���жԱȲ�������Ȼû���ṩԴ��,���Ǹ�����Ϊ���Ľ��͵ıȽ���ϸ��
һ��ժҪ���
���������һ��LPU(Line Proposal Unit),������Faster R-CNN��RPN,������Faster R-CNN������ṹ��ͬ,������н���,��T i t a n X G P U ����ﵽ��30FPS��
����������
1.RPN-LPU
-
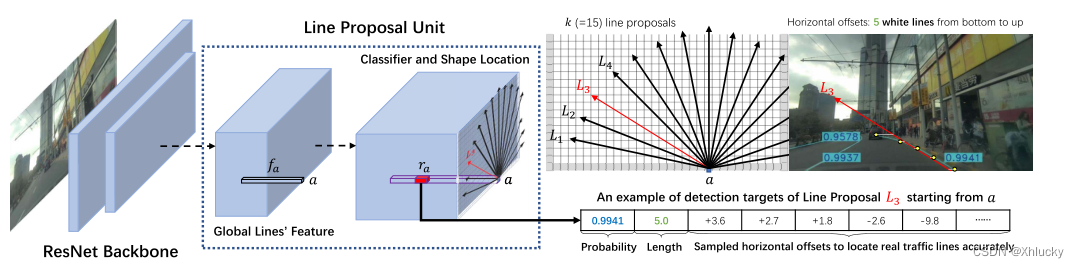
����FasterR-CNN�е�RPN,����ͼ�е�ÿ���������ڴ�,Ԥ����k��anchor��RPNԤ���ÿ���������ڴ���Ӧanchor��2������score�Լ�4���ع����������HxW����ͼ,һ��Ԥ��HWk��anchor������
-
���ڱ��ĵ�LPU,ֻ������ͼ�������߽紦Ԥ����k��line proposal,����������߽�ֱ��Ӧԭͼ����ߡ��ұߡ��Լ��м�,�����line proposalָ���Ǵ������߽紦����������,��ͼ���������±߽绬������a����Ӧ��k��line proposal��

-
LPUԤ�����ҡ���ÿ���������ڶ�Ӧk��line proposal��2+S+1ά����,�����������(��ͼ�Ͽ�,ֻ��һ��,��������������Ϊ����),һ�����Ȳ���,S������ڸ�line proposal��ˮƽƫ����,S+1��ͬ�ع顣line proposal+ˮƽƫ�������õ����յij�����,������ڶ���ͼ��


-
��FasterR-CNN�е�RPN��ͬ��һ��,��FPNԤ������Ľ��������ΪFasterR-CNN�����ս��,��ΪFasterR-CNN����Ҫ�پ���Fast R-CNN�Dz���������յĽ����LPU����Ľ����Ҫ��Ϊ���ս��ʹ�õġ�
2.Line proposal�Լ���ʧ����
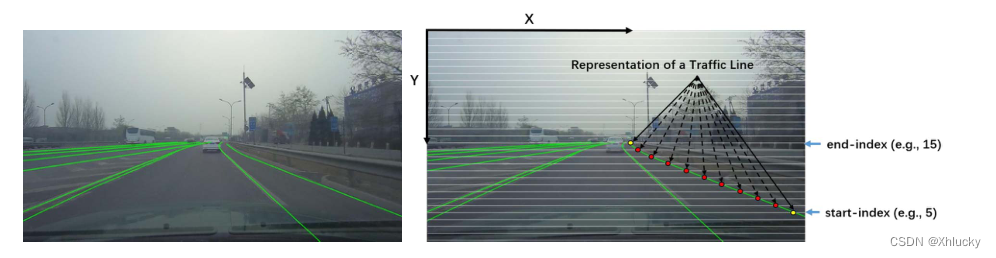
- ʵ�ʳ����߲���һЩ���������,�Զ���ˮƽ�߽�����Ƭ,�õ�ˮƽ���복���ߵĽ���,���̶�������,ʹ�ú������һ������ȥ��ʾ�����ߡ�
ʵ�ʳ����߱�ʾ:
l = { x s l , x s l + 1 , ? ? , x e l } l=\left\{x_{s^{l}}, x_{s^{l}+1}, \cdots, x_{e^{l}}\right\} l={xsl?,xsl+1?,?,xel?}
LIne Proposal��ʾ:
L = { X s L , X s L + 1 , ? ? , X i n f } L=\left\{X_{s^{L}}, X_{s^{L}+1}, \cdots, X_{i n f}\right\} L={XsL?,XsL+1?,?,Xinf?} - ��������ȷ��
s c = max ? ( s L i , s l j ) , e c = min ? ( i n f , e l j ) = e l j s^{c}=\max \left(s^{L_{i}}, s^{l_{j}}\right), e^{c}=\min \left(i n f, e^{l_{j}}\right)=e^{l_{j}} sc=max(sLi?,slj?),ec=min(inf,elj?)=elj?
D ( L i , l j ) = { �� p = s c e c �O X p ? x p �O e c ? s c + 1 , e c �� s c i n f , e c < s c . D\left(L_{i}, l_{j}\right)=\left\{\begin{array}{ll} \frac{\sum_{p=s^{c}}^{e^{c}}\left|X_{p}-x_{p}\right|}{e^{c}-s^{c}+1}, & e^{c} \geq s^{c} \\ i n f, & e^{c}<s^{c} . \end{array}\right. D(Li?,lj?)={ec?sc+1��p=scec?�OXp??xp?�O?,inf,?ec��scec<sc.?
�����Lne Proposal�CLi����ʵ������lj�ľ���D,���ڵ�ǰ��������˵,D��С��DС���趨����ֵt_pos(���õ�15,�������NMSʹ�õ���ֵҲΪ15)ʱ,Ϊ������ - ��ʧ����
L ( p i , r i ) = �� �� i L c l s ( p i , p i ? ) + �� i p i ? L r e g ( r i , r i ? ) \mathcal{L}\left(p_{i}, \mathbf{r}_{i}\right)=\lambda \sum_{i} \mathcal{L}_{c l s}\left(p_{i}, p_{i}^{*}\right)+\sum_{i} p_{i}^{*} \mathcal{L}_{r e g}\left(\mathbf{r}_{i}, \mathbf{r}_{i}^{*}\right) L(pi?,ri?)=��i��?Lcls?(pi?,pi??)+i��?pi??Lreg?(ri?,ri??)
�ɷ�����ع����������,����ȷ��Ԥ���Line Proposal��ʵ�ʳ����ߵ����Ŷ� - �ع鲿��
r i ? = { e l j ? s l j + 1 , x s l j ? X s L i , x s l j + 1 ? X s L i + 1 , ? ? } \mathbf{r}_{i}^{*}=\left\{e^{l_{j}}-s^{l_{j}}+1, x_{s^{l_{j}}}-X_{s^{L_{i}}}, x_{s^{l_{j}}+1}-X_{s^{L_{i}+1}}, \cdots\right\} ri??={elj??slj?+1,xslj???XsLi??,xslj?+1??XsLi?+1?,?}
3.Ԥ��
- Ԥ��ʱ,ʹ��NMS,������D��Ϊ������
- ������ģ�ͱȽ�ʱ,����APʹ�õ�IOU,�ǽ�Ԥ��õ��ij����ߵ����ص���ʵ�ʳ����ߵ����ص����������չ��5֮����м��㡣
�ܽ�
��ƪ�������dz��������,����Ŀ���ⷽ�������һƪ���ġ�(������д)