���������ѧϰ-�ʼǡ�R-CNNϵ��
R-CNN
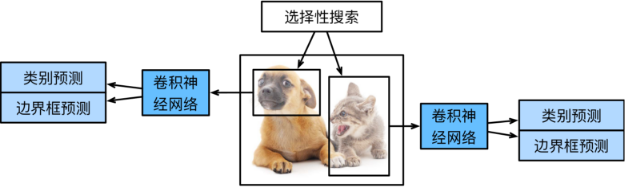
�������������(region-based CNN��regions with CNN features,R-CNN)�ǽ����ģ��Ӧ����Ŀ����Ŀ����Թ���֮һ��
R-CNN��������ѡ��������,������ͼ����ѡȡ������������(��ê��Ҳ��һ��ѡȡ����),����ע���ǵ����ͱ߽��(��ƫ����)��
Ȼ��,�þ���������ֱ��ÿ�������������ǰ���Գ�ȡ��������
������,��ÿ�����������������Ԥ�����ͱ߽��
Fast R-CNN
R-CNN����Ҫ����ƿ������,Ҫ��ÿ��ê�����һ�ζ�����CNNǰ������,������˾�ļ���ɱ���
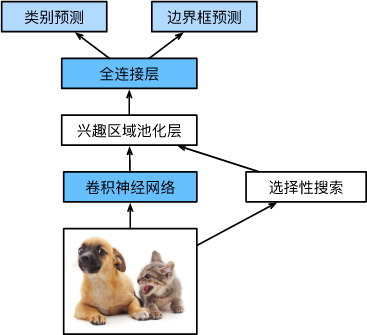
Fast R-CNN�Դ˽����˸Ľ�����ֻ������ͼ���Ͻ���һ��CNN��ǰ��,��ȡ������ͼ��
ͬʱ,������ͼ�����ѡ��������ѡȡ��������
�õ�����ͼ�����������,���������뵽һ��������Ȥ����ػ���(RoI pooling) ��layer��
�����ȫ���Ӳ�������ͱ߽�Ԥ�⡣
��Ȥ����ػ���
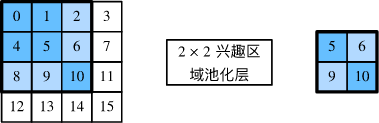
���RoI pooling��Ҫ�ǽ���Ȥ����Ĵ�С����һ��ͳһ,������������,��һ����������ͼ��ʾ:
������ӵ�������һ��
4
��
4
4 \times 4
4��4������ͼ(��CNN��ȡ)��һ��λ�����Ͻǵ�
3
��
3
3 \times 3
3��3����������(��ѡ����������ȡ)���
�ػ��˴�С��
2
��
2
2 \times 2
2��2,�����������������ָ�Ϊ
2
��
2
2 \times 2
2��2��4��������,ÿ����������ȡһ�����ֵ,�õ�
2
��
2
2 \times 2
2��2���������������һ���̿��Կ�����һ�ַǾ��ȵ�Max pooling������
Faster R-CNN
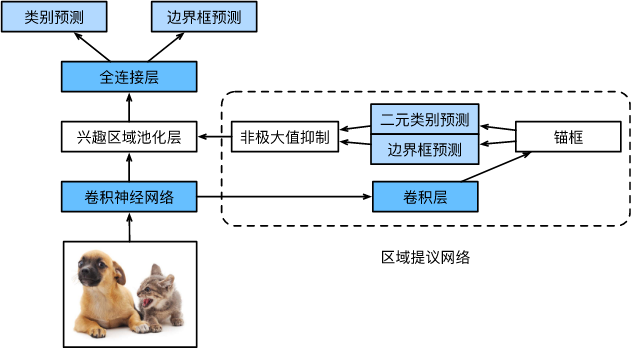
Faster R-CNN ����Fast R-CNN�Ļ����ϵĽ�һ���Ľ�,��������������������Ż�,�����ѡ���������滻Ϊ������������(region proposal network),�Ӷ����������������������,����֤Ŀ����ľ�����
������������
��������������Կ�����һ���ֲڵ�Ŀ�������硣��ͨ��һ���ķ���(������ѡ��������������������)���ɴ���ê��,����ֱ�ӽ���Щê�����뵽RoI pooling,����ͨ���Ǽ���ֵ����(NMS)����һ����ѡ,������ͬһ��Ŀ��Ķ��ê����ѡ��һ������ê����,�Ӷ��������������������
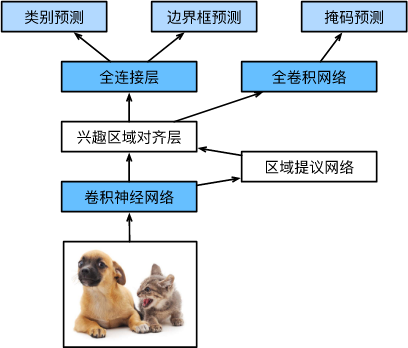
Mask R-CNN
Mask R-CNN����Faster R-CNN�Ķ���,������Ҫ�ı���������һ���µ�ȫ�����������MaskԤ�⡣�����ѵ�����б�ע��ÿ��Ŀ����ͼ���ϵ����ؼ�λ��,��ôMask R-CNN�ܹ���Ч��������Щ�꾡�ı�ע��Ϣ��һ������Ŀ����ľ��ȡ�
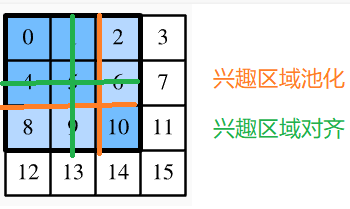
����,RoI�ػ�����������ƥ������,����ͨ��Ҫ��ȷ��ÿ�����ص������ָ�������˵�����DZȽϴ�ġ�
Mask R-CNN��RoI�ػ����滻Ϊ��RoI���������Ȥ��������������в����ȵķָ�,����ֱ�ӽ������ؼ�����и�:
����RoI�ػ��������Լ�RoI��������θĽ���,�����Ʋ���ƪ����:
Mask R-CNN����_���Ͼd��IJ���-CSDN����_mask_rcnn
�ܽ�
R-CNN��Ȼ�����˼��θĽ�,�ٶ�����һЩ����,���Ǻ������㷨��,���ļ���������ƫ��,��Ҫ���ƻ��Ǿ��ȸ�,���Գ����ڸ߾��ȳ����С�