1. ЗЯЛАВЛЖрЫЕ,ЯШПДВтЪдаЇЙћЭМ
a)ФЃАхдЭМ:
b) ФцЪБеыа§зЊ30Ёу:
?c)ЫГЪБеыа§зЊ30Ёу:

2. ЯТУцЗжЯэвЛЯТПЊЗЂЙ§ГЬ
a) ЮЊСЫЬсЩ§ЫбЫїЦЅХфЫйЖШ,ашвЊЙЙНЈН№зжЫўФЃаЭ,Н№зжЫўВуЪ§ВЛвЫЙ§Жр,вЛАу2~3Ву,вдЪЕМЪЭМЯёжЪСПЮЊвРОн,ДњТыЪЕЯжЗНЪН:
//ЖдФЃАхЭМЯёКЭД§МьВтЭМЯёЗжБ№НјааЭМЯёН№зжЫўЯТВЩбљ
for (int i = 0; i < numLevels; i++)
{
Cv2.PyrDown(src, src, new Size(src.Cols / 2, src.Rows / 2));
Cv2.PyrDown(model, model, new Size(model.Cols / 2, model.Rows / 2));
}
//ЮЊСЫЬсЩ§ЫйЖШ,жБНгЩЯВЩбљЕНзюЕзВу
for (int i = 0; i < numLevels; i++)
{
Cv2.PyrUp(src, src, new Size(src.Cols * 2,
src.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
Cv2.PyrUp(model, model, new Size(model.Cols * 2,
model.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
}b) ЖрНЧЖШЦЅХфЪБашвЊНЋЭМЯёАДеевЛЖЈЕФНЧЖШВНГЄбЛЗНјааЫбЫї,а§зЊЕФЭМЯёПЩвдЪЧЕБЧАЪЕЪБЭМвВПЩвдЪЧФЃАхЭМ,ВЛЙ§ЛљгкЫйЖШПМТЧбЁдёСЫФЃАхРДзїЮЊа§зЊ,ЭЌЪБФЃАхЭМЯёвВЪЧЙЬЖЈВЛБфЕФ,ДњТыЪЕЯжЗНЪН:
/// <summary>
/// ЭМЯёа§зЊ,ВЂЛёа§зЊКѓЕФЭМЯёБпНча§зЊОиаЮ
/// </summary>
/// <param name="image"></param>
/// <param name="angle"></param>
/// <param name="imgBounding"></param>
/// <returns></returns>
public static Mat ImageRotate(Mat image, double angle,ref RotatedRect imgBounding,ref Mat maskMat)
{
Mat newImg = new Mat();
Point2f pt = new Point2f((float)image.Cols / 2, (float)image.Rows / 2);
Mat M = Cv2.GetRotationMatrix2D(pt, -angle, 1.0);
var mIndex = M.GetGenericIndexer<double>();
double cos = Math.Abs(mIndex[0, 0]);
double sin = Math.Abs(mIndex[0, 1]);
int nW = (int)((image.Height * sin) + (image.Width * cos));
int nH = (int)((image.Height * cos) + (image.Width * sin));
mIndex[0, 2] += (nW / 2) - pt.X;
mIndex[1, 2] += (nH / 2) - pt.Y;
Cv2.WarpAffine(image, newImg, M, new CVSize(nW, nH));
//ЛёШЁЭМЯёБпНча§зЊОиаЮ
Rect rect = new CVRect(0, 0, image.Width, image.Height);
Point2f[] srcPoint2Fs = new Point2f[4]
{
new Point2f(rect.Left,rect.Top),
new Point2f (rect.Right,rect.Top),
new Point2f (rect.Right,rect.Bottom),
new Point2f (rect.Left,rect.Bottom)
};
Point2f[] boundaryPoints = new Point2f[4];
var A = M.Get<double>(0, 0);
var B = M.Get<double>(0, 1);
var C = M.Get<double>(0, 2); //Tx
var D = M.Get<double>(1, 0);
var E = M.Get<double>(1, 1);
var F = M.Get<double>(1, 2); //Ty
for(int i=0;i<4;i++)
{
boundaryPoints[i].X = (float)((A * srcPoint2Fs[i].X) + (B * srcPoint2Fs[i].Y) + C);
boundaryPoints[i].Y = (float)((D * srcPoint2Fs[i].X) + (E * srcPoint2Fs[i].Y) + F);
if (boundaryPoints[i].X < 0)
boundaryPoints[i].X = 0;
else if (boundaryPoints[i].X > nW)
boundaryPoints[i].X = nW;
if (boundaryPoints[i].Y < 0)
boundaryPoints[i].Y = 0;
else if (boundaryPoints[i].Y > nH)
boundaryPoints[i].Y = nH;
}
Point2f cenP = new Point2f((boundaryPoints[0].X + boundaryPoints[2].X) / 2,
(boundaryPoints[0].Y + boundaryPoints[2].Y) / 2);
double ang = angle;
double width1=Math.Sqrt(Math.Pow(boundaryPoints[0].X- boundaryPoints[1].X ,2)+
Math.Pow(boundaryPoints[0].Y - boundaryPoints[1].Y,2));
double width2 = Math.Sqrt(Math.Pow(boundaryPoints[0].X - boundaryPoints[3].X, 2) +
Math.Pow(boundaryPoints[0].Y - boundaryPoints[3].Y, 2));
//double width = width1 > width2 ? width1 : width2;
//double height = width1 > width2 ? width2 : width1;
imgBounding = new RotatedRect(cenP, new Size2f(width1, width2), (float)ang);
Mat mask = new Mat(newImg.Size(), MatType.CV_8UC3, Scalar.Black);
mask.DrawRotatedRect(imgBounding, Scalar.White, 1);
Cv2.FloodFill(mask, new CVPoint(imgBounding.Center.X, imgBounding.Center.Y), Scalar.White);
// mask.ConvertTo(mask, MatType.CV_8UC1);
//mask.CopyTo(maskMat);
//бкФЄИДжЦИјmaskMat
Cv2.CvtColor(mask, maskMat, ColorConversionCodes.BGR2GRAY);
Mat _maskRoI = new Mat();
Cv2.CvtColor(mask, _maskRoI, ColorConversionCodes.BGR2GRAY);
Mat buf = new Mat();
//# КкАзЗДзЊ
Cv2.BitwiseNot(_maskRoI, buf);
Mat dst = new Mat();
Cv2.BitwiseAnd(newImg, newImg, dst, _maskRoI);
//Mat dst2 = new Mat();
//Cv2.BitwiseOr(buf, dst, dst2);
return dst;
}c) а§зЊКѓЕФФЃАхЭМЯёЛсВњЩњЮоаЇЧјгђ,ШчЙћНЋЫћУЧвВВЮгыЦЅХфМЦЫу,ФЧУДЯрЫЦЖШЛсгаЫљЯТНЕ,гАЯьЦЅХфаЇЙћ,вђДЫ,ЮвУЧашвЊМгШыmaskбкФЄЭМЯё,ЦСБЮЕєЮоаЇЧјгђ;ЩЯУцЕФДњТыЭЌЪБвВМЦЫуГіа§зЊКѓЕФЮоаЇЧјгђЭЌЪБНЋЫќзїЮЊmaskЁЃ
newtemplate = ImageRotate(model, start + step * i, ref rotatedRect, ref mask);
if (newtemplate.Width > src.Width || newtemplate.Height > src.Height)
continue;
Cv2.MatchTemplate(src, newtemplate, result, matchMode, mask);
Cv2.MinMaxLoc(result, out double minval, out double maxval, out CVPoint minloc, out CVPoint maxloc, new Mat());
d)ЫбЫїЕФНЧЖШВНГЄПЩвдИљОнашвЊЕФОЋЖШ,дкЩЯВЩбљЕФЙ§ГЬж№НЅдіМг,ШчЙћЕзВуашвЊЕФОЋЖШЮЊ1,дкЯТВЩбљЕФЙ§ГЬПЩвджИЪ§ж№МЖЕнді,БЯОЙдкЪЕМЪЕФЪЙгУЙ§ГЬЮвУЧЛЙЪЧашвЊЫќУЧвдНЯПьЕФЫйЖШЭъГЩећИіЫбЫїЙ§ГЬЕФ,ЩЯВЩбљЕФЙ§ГЬжївЊЪЧж№МЖЬсЩ§МьВтОЋЖШ,ЮЛжУКЭНЧЖШЁЃвдЩЯвЛВуЫбЫїЕНЕФЕуЮЛЮЊжааФ,зѓгввЛБЖФЃАхЕФПэЖШ,ЩЯЯТвЛБЖФЃАхЕФИпЖШРДзїЮЊаТЕФЫбЫїЧјгђ,ж№МЖРДЭъГЩЩЯВЩбљЁЃ
//ПЊЪМЩЯВЩбљ
Rect cropRegion = new CVRect(0, 0, 0, 0);
//for (int j = numLevels - 1; j >= 0; j--)
{
//ЮЊСЫЬсЩ§ЫйЖШ,жБНгЩЯВЩбљЕНзюЕзВу
for (int i = 0; i < numLevels; i++)
{
Cv2.PyrUp(src, src, new Size(src.Cols * 2,
src.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
Cv2.PyrUp(model, model, new Size(model.Cols * 2,
model.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
}
location.X *= (int)Math.Pow(2, numLevels);
location.Y *= (int)Math.Pow(2, numLevels);
modelrrect = new RotatedRect(new Point2f((float)(modelrrect.Center.X * Math.Pow(2, numLevels)),//ЯТвЛВу,ЗХДѓ2БЖ
(float)(modelrrect.Center.Y * Math.Pow(2, numLevels))),
new Size2f(modelrrect.Size.Width * Math.Pow(2, numLevels),
modelrrect.Size.Height * Math.Pow(2, numLevels)), 0);
CVPoint cenP = new CVPoint(location.X + modelrrect.Center.X,
location.Y + modelrrect.Center.Y);//ЭЖгАЕНЯТвЛВуЕФЦЅХфЕуЮЛжааФ
int startX = cenP.X - model.Width;
int startY = cenP.Y - model.Height;
int endX = cenP.X + model.Width;
int endY = cenP.Y + model.Height;
cropRegion = new CVRect(startX, startY, endX - startX, endY - startY);
cropRegion = cropRegion.Intersect(new CVRect(0, 0, src.Width, src.Height));
Mat newSrc = MatExtension.Crop_Mask_Mat(src, cropRegion);
//УПЯТвЛВуН№зжЫў,НЧЖШМфИєМѕЩй2БЖ
step = 1;
//НЧЖШПЊЪМКЭЗЖЮЇ
range = 20;
start = angle - 10;
bool testFlag = false;
for (int k = 0; k <= (int)range / step; k++)
{
newtemplate = ImageRotate(model, start + step * k, ref rotatedRect, ref mask);
if (newtemplate.Width > newSrc.Width || newtemplate.Height > newSrc.Height)
continue;
Cv2.MatchTemplate(newSrc, newtemplate, result, TemplateMatchModes.CCoeffNormed);
Cv2.MinMaxLoc(result, out double minval, out double maxval,
out CVPoint minloc, out CVPoint maxloc, new Mat());
if (maxval > temp)
{
//ОжВПзјБъ
location.X = maxloc.X;
location.Y = maxloc.Y;
temp = maxval;
angle = start + step * k;
//ОжВПзјБъ
modelrrect = rotatedRect;
testFlag = true;
}
}
if (testFlag)
{
//ОжВПзјБъ--ЁЗећЬхзјБъ
location.X += cropRegion.X;
location.Y += cropRegion.Y;
}
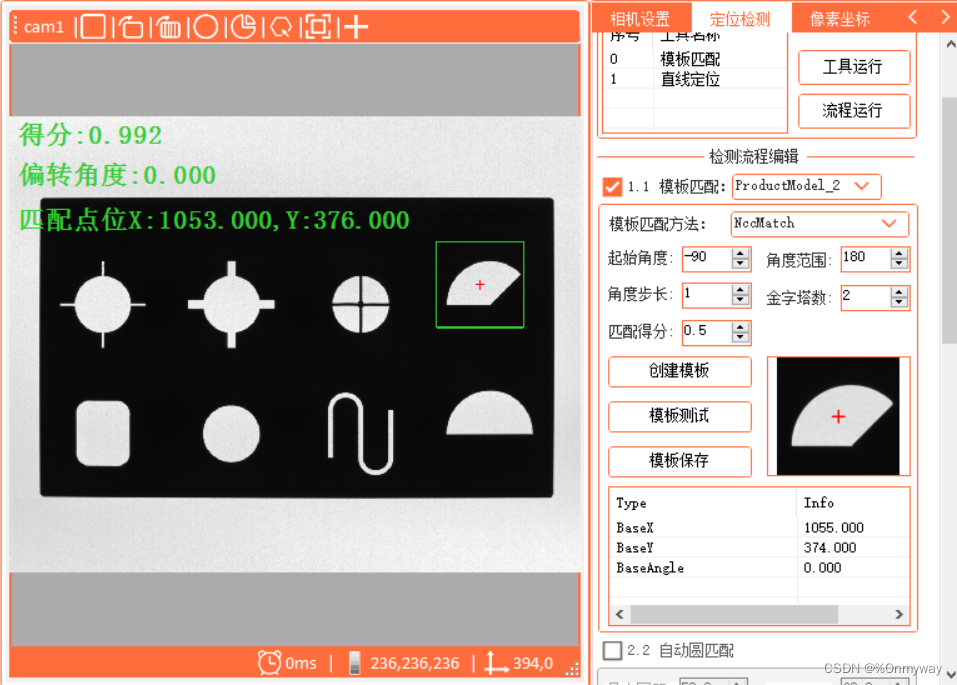
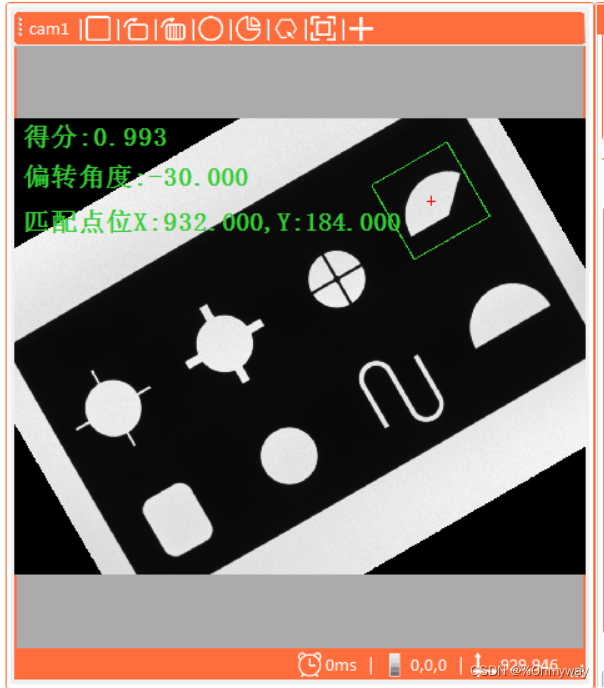
}e)зюКѓОЭЪЧНЋВтЪдЕФНсЙћЛцжЦГіРД,зїЮЊOVERLAYЯдЪОдкЭМЯёЩЯУц
ПЩВЮПМДњТы:
if (result.Score<= 0)
{
currvisiontool.DrawText(new TextEx("ФЃАхЦЅХфЪЇАм!") { x = 1000, y = 10, brush = new SolidBrush(Color.Red) });
currvisiontool.AddTextBuffer(new TextEx("ФЃАхЦЅХфЪЇАм!") { x = 1000, y = 10, brush = new SolidBrush(Color.Red) });
stuModelMatchData.runFlag = false;
return;
}
currvisiontool.DrawText(new TextEx("ЕУЗж:" + result.Score.ToString("f3")));
currvisiontool.AddTextBuffer(new TextEx("ЕУЗж:" + result.Score.ToString("f3")));
currvisiontool.DrawText(new TextEx("ЦЋзЊНЧЖШ:" + result.T.ToString("f3")) { x = 10, y = 100 });
currvisiontool.AddTextBuffer(new TextEx("ЦЋзЊНЧЖШ:" + result.T.ToString("f3")) { x = 10, y = 100 });
currvisiontool.DrawText(new TextEx(string.Format("ЦЅХфЕуЮЛX:{0},Y:{1}", result.X.ToString("f3"),
result.Y.ToString("f3")))
{ x = 10, y = 200 });
currvisiontool.AddTextBuffer(new TextEx(string.Format("ЦЅХфЕуЮЛX:{0},Y:{1}", result.X.ToString("f3"),
result.Y.ToString("f3")))
{ x = 10, y = 200 });3. Й§ГЬаЇЙћбнЪОЭМ
a) ДДНЈФЃАх:бЁдёОпгаЮШЖЈЬиеї,КЭБГОАгавЛЖЈЕФЖдБШЧјЗжЕФЭМЯёЧјгђРДжЦзїФЃАх
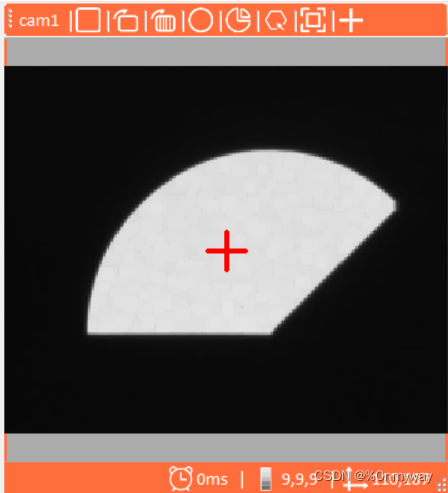
?b)ФЃАха§зЊКѓЕФЭМЯё

? c)а§зЊКѓЖдгІЕФбкФЄЭМЯё

?4. NCCЖрНЧЖШФЃАхЦЅХфКЫаФДњТыЖЮШчЯТ:
/// <summary>
/// ДДНЈNCCФЃАх
/// </summary>
/// <param name="src"></param>
/// <param name="RegionaRect"></param>
/// <returns></returns>
public Mat CreateTemplateNcc(Mat src, Rect RegionaRect,ref double modelX,ref double modelY,ref Mat modelGrayMat)
{
Mat ModelMat = MatExtension.Crop_Mask_Mat(src, RegionaRect);
Mat Morphological = Morphological_Proces.MorphologyEx(ModelMat, MorphShapes.Rect,
new OpenCvSharp.Size(5, 5), MorphTypes.Open);
Mat dst = Morphological.CvtColor(ColorConversionCodes.GRAY2BGR);
Morphological.CopyTo(modelGrayMat);
CVPoint cenP = new CVPoint(RegionaRect.Width / 2,
RegionaRect.Height / 2);
modelX = RegionaRect.X + RegionaRect.Width / 2;
modelY = RegionaRect.Y + RegionaRect.Height / 2;
Console.WriteLine(string.Format("ФЃАхжааФЕуЮЛ:x:{0},y:{1}", RegionaRect.X + RegionaRect.Width / 2,
RegionaRect.Y + RegionaRect.Height / 2));
dst.drawCross(cenP, Scalar.Red, 20, 2);
return dst;
}
/// <summary>
/// ЖрНЧЖШФЃАхЦЅХфЗНЗЈ(NCC:ЙщвЛЛЏЯрЙиЯЕЪ§)
/// </summary>
/// <param name="srcImage">Д§ЦЅХфЭМЯё</param>
/// <param name="modelImage">ФЃАхЭМЯё</param>
/// <param name="angleStart">Ц№ЪМНЧЖШ</param>
/// <param name="angleRange">НЧЖШЗЖЮЇ</param>
/// <param name="angleStep">НЧЖШВНГЄ</param>
/// <param name="numLevels">Н№зжЫўВуМЖ</param>
/// <param name="thresScore">ЕУЗжуажЕ</param>
/// <returns></returns>
private NccTemplateMatchResult TempalteMatchNcc(Mat srcImage, Mat modelImage,
double angleStart, double angleRange, double angleStep,
int numLevels, double thresScore, int nccMethod=5)
{
double step = angleRange / ((angleRange / angleStep) / 10); //НЧЖШМфИє
double start = angleStart; //Ц№ЪМНЧЖШ
double range = angleRange; //НЧЖШЗЖЮЇ
//ЖЈвхЭМЦЌЦЅХфЫљашвЊЕФВЮЪ§
//int resultCols = srcImage.Cols - modelImage.Cols + 1;
//int resultRows = srcImage.Rows - modelImage.Cols + 1;
//Mat result = new Mat(resultCols, resultRows, MatType.CV_8U);
Mat result = new Mat();
Mat src = new Mat();
Mat model = new Mat();
srcImage.CopyTo(src);
modelImage.CopyTo(model);
//Morphology
src = Morphological_Proces.MorphologyEx(src, MorphShapes.Rect,
new OpenCvSharp.Size(5, 5), MorphTypes.Open);
//ЖдФЃАхЭМЯёКЭД§МьВтЭМЯёЗжБ№НјааЭМЯёН№зжЫўЯТВЩбљ
for (int i = 0; i < numLevels; i++)
{
Cv2.PyrDown(src, src, new Size(src.Cols / 2, src.Rows / 2));
Cv2.PyrDown(model, model, new Size(model.Cols / 2, model.Rows / 2));
}
TemplateMatchModes matchMode = TemplateMatchModes.CCoeffNormed;
switch (nccMethod)
{
case 0:
matchMode = TemplateMatchModes.SqDiff;
break;
case 1:
matchMode = TemplateMatchModes.SqDiffNormed;
break;
case 2:
matchMode = TemplateMatchModes.CCorr;
break;
case 3:
matchMode = TemplateMatchModes.CCorrNormed;
break;
case 4:
matchMode = TemplateMatchModes.CCoeff;
break;
case 5:
matchMode = TemplateMatchModes.CCoeffNormed;
break;
}
//дкУЛгаа§зЊЕФЧщПіЯТНјааЕквЛДЮЦЅХф
Cv2.MatchTemplate(src, model, result, matchMode);
Cv2.MinMaxLoc(result, out double minVal, out double maxVal, out CVPoint minLoc, out CVPoint maxLoc, new Mat());
CVPoint location = maxLoc;
double temp = maxVal;
if (nccMethod == 0 || nccMethod == 1)
{
temp = minVal;
location = minLoc;
}
double angle = 0;
Mat newtemplate;//а§зЊКѓаТФЃАх
Mat mask = new Mat();//бкФЄ
RotatedRect rotatedRect = new RotatedRect();
//ФЃАхОиаЮ
RotatedRect modelrrect = new RotatedRect(new Point2f(model.Width / 2,
model.Height / 2), new Size2f(model.Width, model.Height), 0);
//вдзюМбЦЅХфЕузѓгвЪЎБЖНЧЖШВНГЄНјаабЛЗЦЅХф,жБЕННЧЖШВНГЄаЁгкВЮЪ§НЧЖШВНГЄ
if (nccMethod == 0 || nccMethod == 1)
{
do
{
for (int i = 0; i <= (int)range / step; i++)
{
newtemplate = ImageRotate(model, start + step * i, ref rotatedRect, ref mask);
Cv2.MatchTemplate(src, newtemplate, result, matchMode, mask);
Cv2.MinMaxLoc(result, out double minval, out double maxval, out CVPoint minloc, out CVPoint maxloc, new Mat());
if (minval < temp)//ЦНЗНВюжЕЗНЪН,жЕдНаЁдНКУ
{
location = minloc;
temp = minval;
angle = start + step * i;
modelrrect = rotatedRect;
}
}
range = step * 2;
start = angle - step;
step = step / 10;
} while (step > angleStep);
Console.WriteLine(string.Format("x:{0},y:{1},angle:{2},score:{3}",
location.X * Math.Pow(2, numLevels),
location.Y * Math.Pow(2, numLevels),
angle,
temp
));
//ИУЗНЪНМЦЫуЕФзјБъОЋЖШЮоЗЈТњзу,ашвЊНјааН№зжЫўЩЯВЩбљ
Console.WriteLine(string.Format("x:{0},y:{1},angle:{2},score:{3}",
modelrrect.Center.X * Math.Pow(2, numLevels) + location.X * Math.Pow(2, numLevels),
modelrrect.Center.Y * Math.Pow(2, numLevels) + location.Y * Math.Pow(2, numLevels),
angle,
temp
));
if (temp < thresScore)
{
return new NccTemplateMatchResult(location.X * Math.Pow(2, numLevels), location.Y * Math.Pow(2, numLevels), angle, temp)
{
rotatedRect = new RotatedRect(new Point2f((float)((modelrrect.Center.X + location.X) * Math.Pow(2, numLevels)),
(float)((modelrrect.Center.Y + location.Y) * Math.Pow(2, numLevels))),
new Size2f(modelrrect.Size.Width * Math.Pow(2, numLevels),
modelrrect.Size.Height * Math.Pow(2, numLevels)),
(float)angle)
};
}
}
else
{
//double minval; double maxval; CVPoint minloc; CVPoint maxloc;
do
{
for (int i = 0; i <= (int)range / step; i++)
{
newtemplate = ImageRotate(model, start + step * i, ref rotatedRect, ref mask);
if (newtemplate.Width > src.Width || newtemplate.Height > src.Height)
continue;
Cv2.MatchTemplate(src, newtemplate, result, matchMode, mask);
Cv2.MinMaxLoc(result, out double minval, out double maxval, out CVPoint minloc, out CVPoint maxloc, new Mat());
if (double.IsInfinity(maxval))
{
Cv2.MatchTemplate(src, newtemplate, result, TemplateMatchModes.CCorrNormed, mask);
Cv2.MinMaxLoc(result, out minval, out maxval, out minloc, out maxloc, new Mat());
}
if (maxval > temp)
{
location = maxloc;
temp = maxval;
angle = start + step * i;
modelrrect = rotatedRect;
}
}
range = step * 2;
start = angle - step;
step = step / 10;
} while (step > angleStep) ;
#region-------днВЛЪЙгУ---------
//ПЊЪМЩЯВЩбљ
//Rect cropRegion = new CVRect(0, 0, 0, 0);
for (int j = numLevels - 1; j >= 0; j--)
//{
// //ЮЊСЫЬсЩ§ЫйЖШ,жБНгЩЯВЩбљЕНзюЕзВу
// for (int i = 0; i < numLevels; i++)
// {
// Cv2.PyrUp(src, src, new Size(src.Cols * 2,
// src.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
// Cv2.PyrUp(model, model, new Size(model.Cols * 2,
// model.Rows * 2));//ЯТвЛВу,ЗХДѓ2БЖ
// }
// location.X *= (int)Math.Pow(2, numLevels);
// location.Y *= (int)Math.Pow(2, numLevels);
// modelrrect = new RotatedRect(new Point2f((float)(modelrrect.Center.X * Math.Pow(2, numLevels)),//ЯТвЛВу,ЗХДѓ2БЖ
// (float)(modelrrect.Center.Y * Math.Pow(2, numLevels))),
// new Size2f(modelrrect.Size.Width * Math.Pow(2, numLevels),
// modelrrect.Size.Height * Math.Pow(2, numLevels)), 0);
// CVPoint cenP = new CVPoint(location.X + modelrrect.Center.X,
// location.Y + modelrrect.Center.Y);//ЭЖгАЕНЯТвЛВуЕФЦЅХфЕуЮЛжааФ
// int startX = cenP.X - model.Width;
// int startY = cenP.Y - model.Height;
// int endX = cenP.X + model.Width;
// int endY = cenP.Y + model.Height;
// cropRegion = new CVRect(startX, startY, endX - startX, endY - startY);
// cropRegion = cropRegion.Intersect(new CVRect(0, 0, src.Width, src.Height));
// Mat newSrc = MatExtension.Crop_Mask_Mat(src, cropRegion);
// //УПЯТвЛВуН№зжЫў,НЧЖШМфИєМѕЩй2БЖ
// step = 2;
// //НЧЖШПЊЪМКЭЗЖЮЇ
// range = 20;
// start = angle - 10;
// bool testFlag = false;
// for (int k = 0; k <= (int)range / step; k++)
// {
// newtemplate = ImageRotate(model, start + step * k, ref rotatedRect, ref mask);
// if (newtemplate.Width > newSrc.Width || newtemplate.Height > newSrc.Height)
// continue;
// Cv2.MatchTemplate(newSrc, newtemplate, result, TemplateMatchModes.CCoeffNormed, mask);
// Cv2.MinMaxLoc(result, out double minval, out double maxval,
// out CVPoint minloc, out CVPoint maxloc, new Mat());
// if (double.IsInfinity(maxval))
// {
// Cv2.MatchTemplate(src, newtemplate, result, TemplateMatchModes.CCorrNormed, mask);
// Cv2.MinMaxLoc(result, out minval, out maxval, out minloc, out maxloc, new Mat());
// }
// if (maxval > temp)
// {
// //ОжВПзјБъ
// location.X = maxloc.X;
// location.Y = maxloc.Y;
// temp = maxval;
// angle = start + step * k;
// //ОжВПзјБъ
// modelrrect = rotatedRect;
// testFlag = true;
// }
// }
// if (testFlag)
// {
// //ОжВПзјБъ--ЁЗећЬхзјБъ
// location.X += cropRegion.X;
// location.Y += cropRegion.Y;
// }
//}
#endregion
//ИУЗНЪНМЦЫуЕФзјБъОЋЖШЮоЗЈТњзу,ашвЊНјааН№зжЫўЩЯВЩбљ
Console.WriteLine(string.Format("x:{0},y:{1},angle:{2},score:{3}",
(modelrrect.Center.X + location.X) * Math.Pow(2, numLevels),
(modelrrect.Center.Y + location.Y) * Math.Pow(2, numLevels),
angle,
temp
));
if (temp > thresScore)
{
return new NccTemplateMatchResult((modelrrect.Center.X + location.X) * Math.Pow(2, numLevels),
(modelrrect.Center.Y + location.Y) * Math.Pow(2, numLevels), angle, temp)
{
rotatedRect = new RotatedRect(new Point2f((float)((modelrrect.Center.X+ location.X) * Math.Pow(2, numLevels)),
(float)((modelrrect.Center.Y + location.Y) * Math.Pow(2, numLevels))),
new Size2f(modelrrect.Size.Width * Math.Pow(2, numLevels),
modelrrect.Size.Height * Math.Pow(2, numLevels)),
(float)angle)
};
};
}
return new NccTemplateMatchResult();
}5. змНс
? ? КУСЫ,ЕНетВНЛљБОЭъГЩСЫећИіЙ§ГЬ,ЕБШЛЛЙгавЛаЉашвЊгХЛЏЕФЙ§ГЬ,БШШч:жиЕўИВИЧ,бЧЯёЫи,вдМАЫбЫїЫйЖШдкЕБЧАН№зжЫўЕФЛљДЁЩЯНјвЛВНгХЛЏЕШ,гааЫШЄЕФХѓгбвдКѓПЩвдвЛЦ№ЬНЬжвЛЯТ,ЭјЩЯC#ЕФзЪСЯНЯЩй,ЕБЧАвВЪЧВЮПМСЫДѓРаУЧC++КЭpythonЕФММЪѕзЪСЯ,ЯЃЭћФмзівЛИіНЯКУАцБОЕФC#НтОіЗНАИЁЃ
ps: бЇЯАШчФцЫЎаажл,ВЛНјдђЭЫ!