目录
上一节01部分介绍了目标检测任务中Faster R-CNN系列的三个Two-Stage算法以及FPN结构(参见这里)。该类方法是基于Region Proposal的算法,需要使用启发式方法(SS算法)或者CNN网络(RPN)产生候选框,然后再在候选框上实现分类和回归。
本文将介绍目标检测任务中的另一类方法,仅仅使用一个CNN网络直接预测不同目标的类别和位置。该类算法速度快,并且实现了端到端的预测,复杂度也比较低。
- SSD算法原文链接:https://arxiv.org/abs/1512.02325
- RetinaNet原文链接:1708.02002.pdf (arxiv.org)
- YOLO v1原文链接:https://arxiv.org/pdf/1506.02640.pdf
1. SSD网络(2016,ECCV)
1.1 Faster RCNN存在问题
- 对小目标的检测效果很差(在某一特征层上进行预测)
- 模型太大,检测速度慢(需要在RPN部分和Fast R-CNN部分分别进行预测)
1.2 SSD网络亮点
- 在不同特征尺度上预测不同尺度的目标(浅层特征层可以检测小目标,因为感受野小,反之亦然)
- 整个网络类似于VGG16,端到端实现分类与回归
- 真正的实时。对于输入尺寸300x300的网络使用Nvidia Titan X在VOC 2007测试集上达到74.3%mAP以及59FPS,对于512x512 的网络,达到了76.9%mAP超越当时最强的Faster RCNN(73.2%mAP)

1.3 网络细节部分
- 虚线框为VGG16的前5层,不同的是Conv5的最后一个maxpooling5为2*2, s2,这里改成了3*3, s1,因此经过该maxpooling5的特征图尺寸不变
- 搭建过程中注意,后面几层卷积中,s=1时,padding=0;s=2时,padding=1
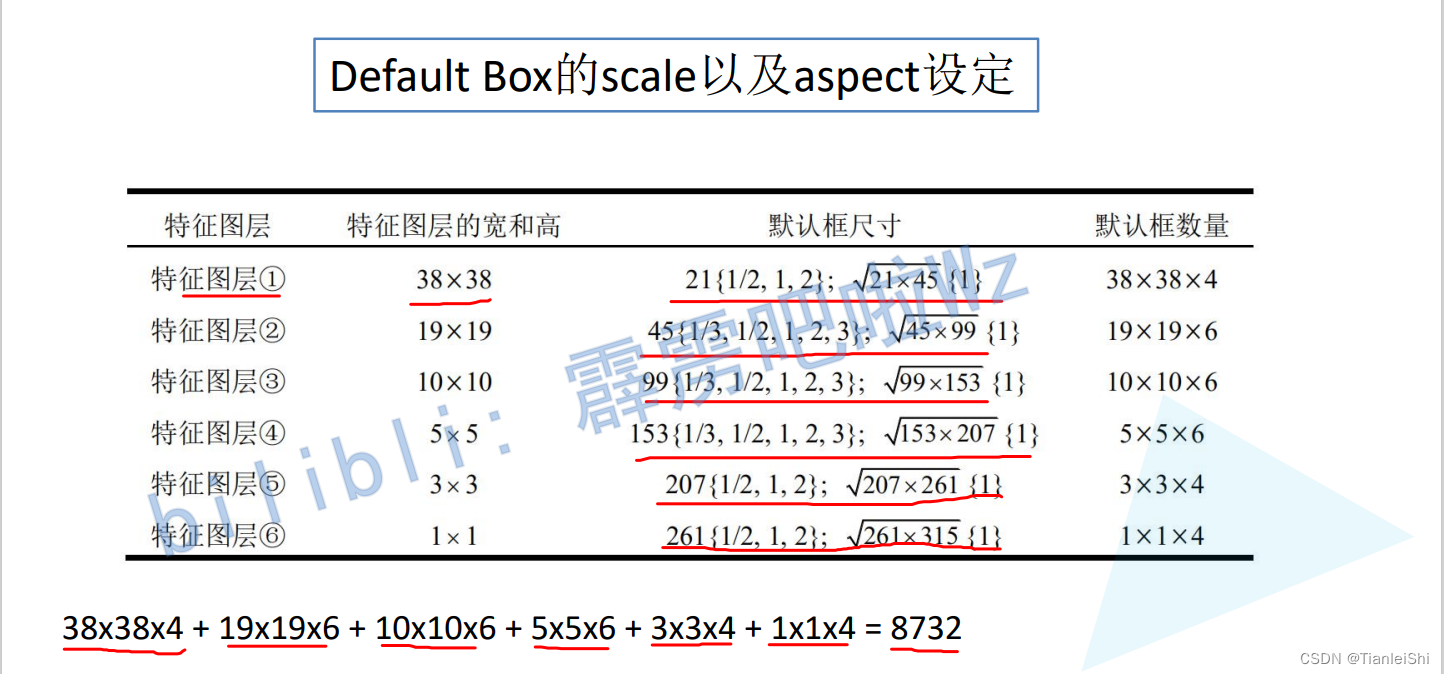
1.4 Default Box的确定
- 类似于Anchor Box,这里的Default Box将它们分别放置在不同的特征层上
- scale和aspect两个参数,最终获得9732个框
1.5 SSD网络预测部分
- 对于每一个预测特征层m*n*p,使用一个3*3*p的kernel卷积,卷积核个数为(c+4)k,c为类别个数,k为box个数
- 目标类别分数预测:ck(每个default box共c个参数)
- 边界框回归参数预测:4k(每个default box共4个参数)(区别于Fast R-CNN,每一个box 4c个参数)

1.6 正负样本选取
- Box与GT-Box匹配最大的IoU,设为正样本
- 对于任意Box与GT-Box的IoU>0.5,设为正样本
- 负样本:8732-正样本=负样本,但不全用,因为会造成样本不平衡
- 计算最大的confidence loss,作为负样本
- 最终保证正负样本比例1:3
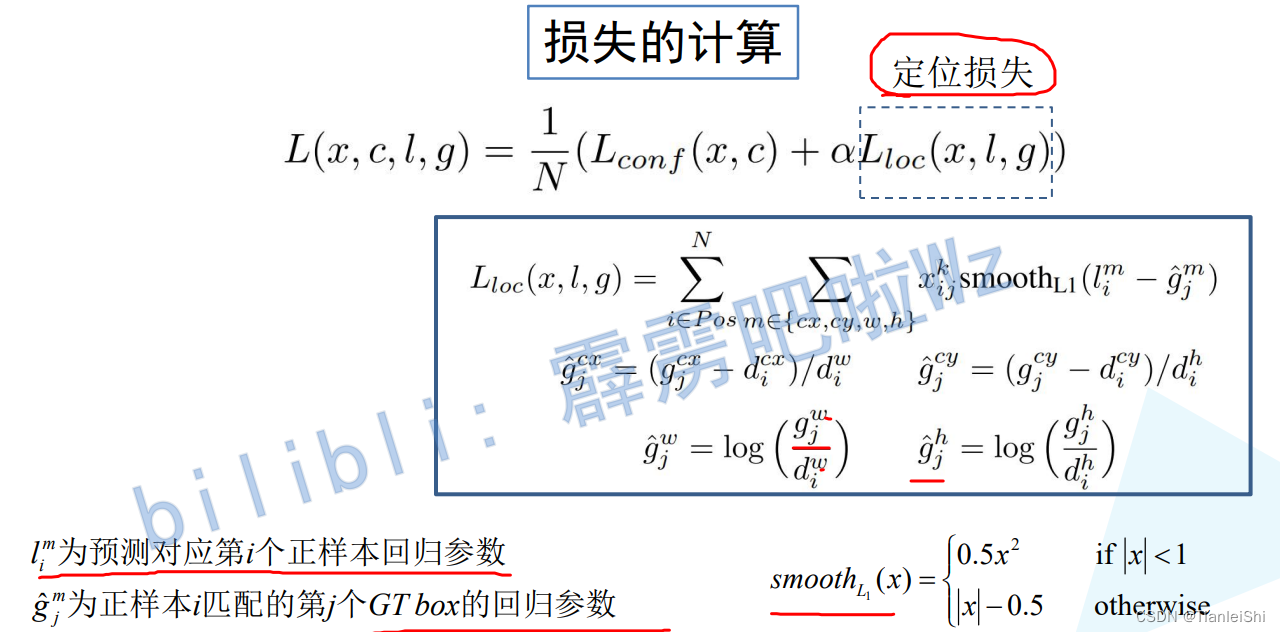
1.7 损失的计算
- 类别损失

- 定位损失
2. RetinaNet网络(2017,CVPR)
?在此之前,目标检测领域普遍以YOLO系列、SSD算法为首的one-stage算法准确率不如以Faster RCNN为代表的two-stage算法。RetinaNet直接省略掉了第二阶段,将RPN网络直接完成了整套的目标检测任务。它的网络结构其实就是FPN网络提取多尺度的特征,然后在多尺度特征的基础上连接检测头,对目标的分类和位置回归进行预测
2.1 RetinaNet网络结构
类似FPN结构,但有三点不同:
- FPN从C2层生成P2,但RetinaNet没有使用C2,因为P2会小号更多的空间和计算量
- FPN中P6层是P5通过maxpooling得到的,RetinaNet通过卷积层下采样(s*3, s2)
- FPN是P2-P6,RetinaNet是P3-P7
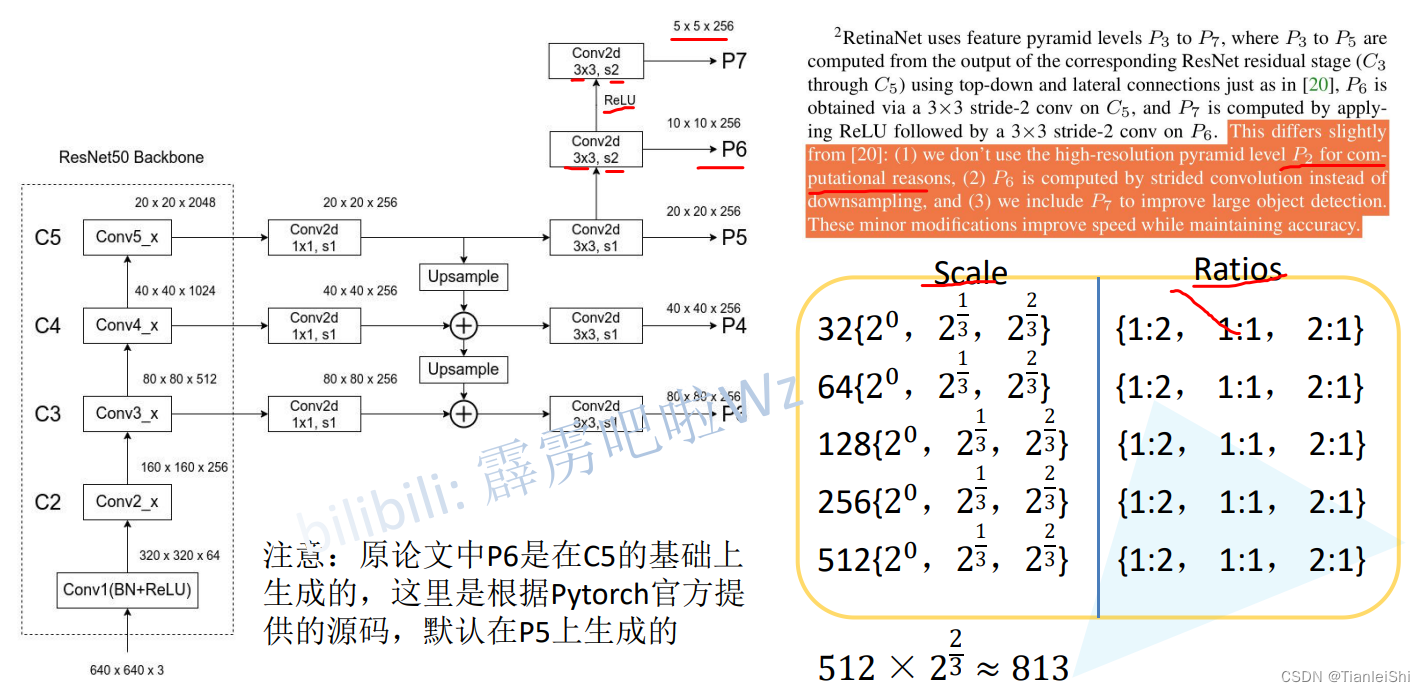
?2.2 Box的scale和ratios
- FPN中每一个预测特征层都只使用了一个scale和3个ratios
- RetinaNet针对每一个预测特征层使用了3个scale和3个ratios
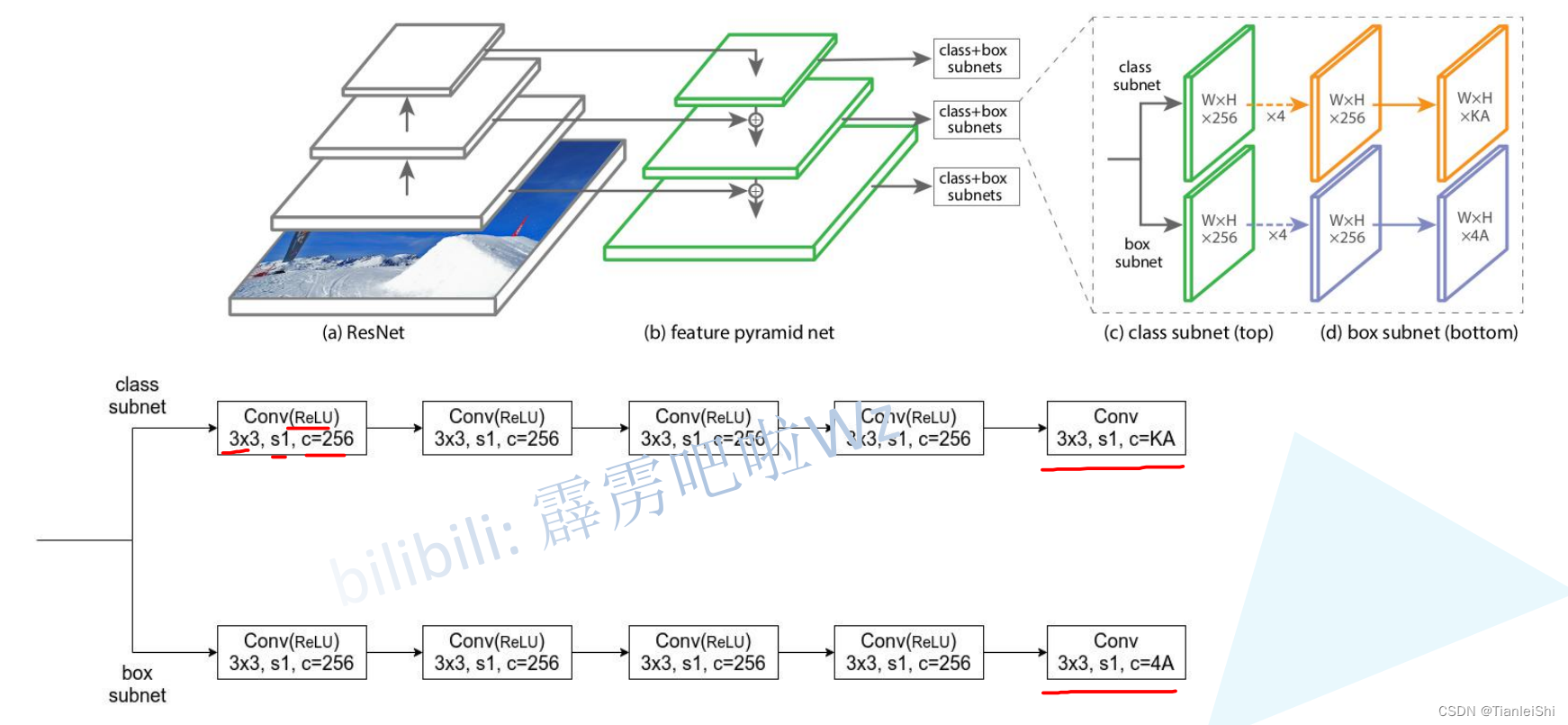
2.3 RetinaNet网络预测器结构
- 权值共享:针对P3-P7使用同一个预测器
2.4 RetinaNet损失计算
- 核心理论:Focal Loss(YOLO v3 SPP中有具体介绍)

3. YOLO v1网络(2016,CVPR)
3.1 YOLO v1网络思想
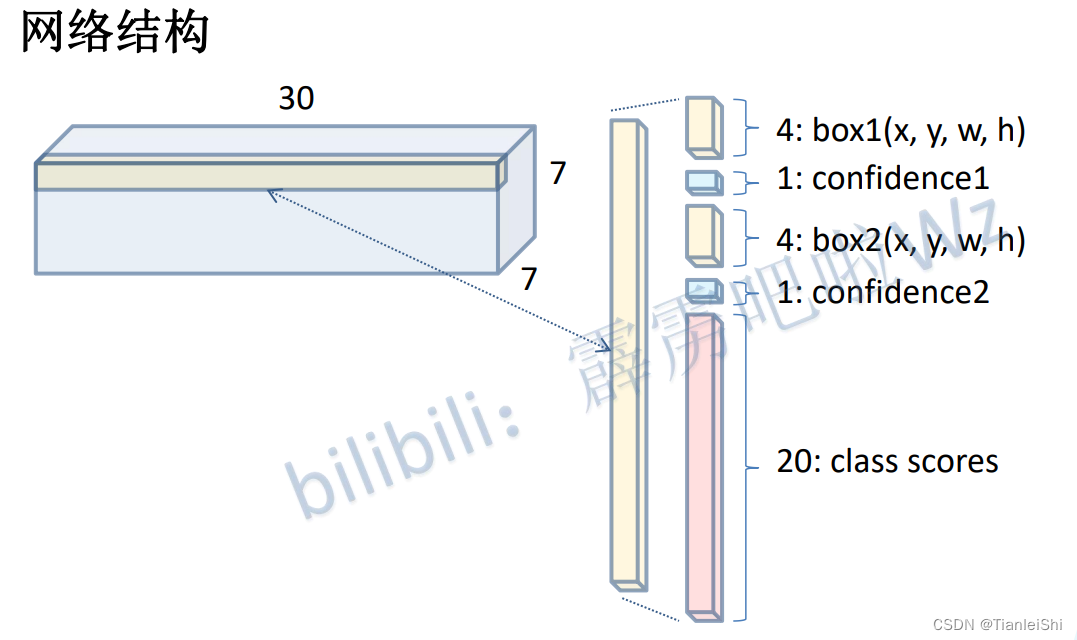
- 将一幅图像分成S*S个网格(grid cell),如果某个object的中心落在这个网格中,则这个网格就负责预测这个object
- 每个网格预测B个bounding box,及其1个置信度confidence score,以及C个类别分数
- 💡置信度反映是否包含object以及在包含object情况下位置的准确性
- 缺陷1:每个网格预测B个box,但是最终只选择IoU最高的box作为物体检测输出,即每个网格最多只预测出一个物体。当物体占画面比例较小,检测效果差
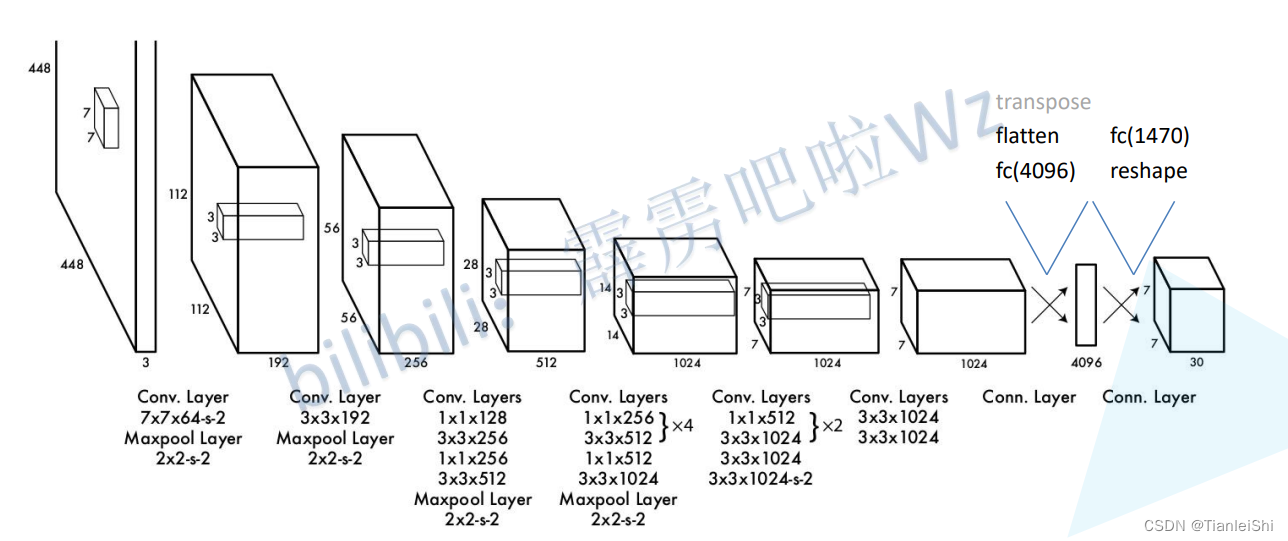
- 网络结构:YOLOv1借鉴了GoogleNet分类网络结构。但未使用inception模块,而是使用1*1卷积层(此处1*1卷积层的存在是为了跨通道信息整合)+3*3卷积层简单替代。
- 最后一层采用全连接层进行类别输出,预测输出相关见3.2内容
- 缺陷2:这就导致了,测试过程中YOLO模型仅支持与训练图像分辨率相同的输入。其他分辨率需要缩放
- 注释:没有标注stride的层,默认步距为1
- 最后一层采用全连接层进行类别输出,预测输出相关见3.2内容
3.2 YOLO v1预测输出
- 经YOLO v1预测输出为7*7*30的张量(30为深度),这要求原始图像尺寸固定,448*448
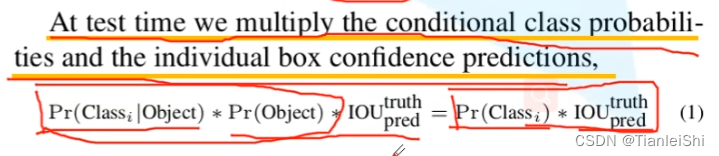
- ?测试阶段,既给出了它为某一目标的概率,又给出了预测目标边界框与真实目标的重叠程度
3.3 YOLO v1损失函数
- bounding box损失:
- B个bbox中与GT具有最高IoU的一个进行坐标误差的反向传播,其余不进行.
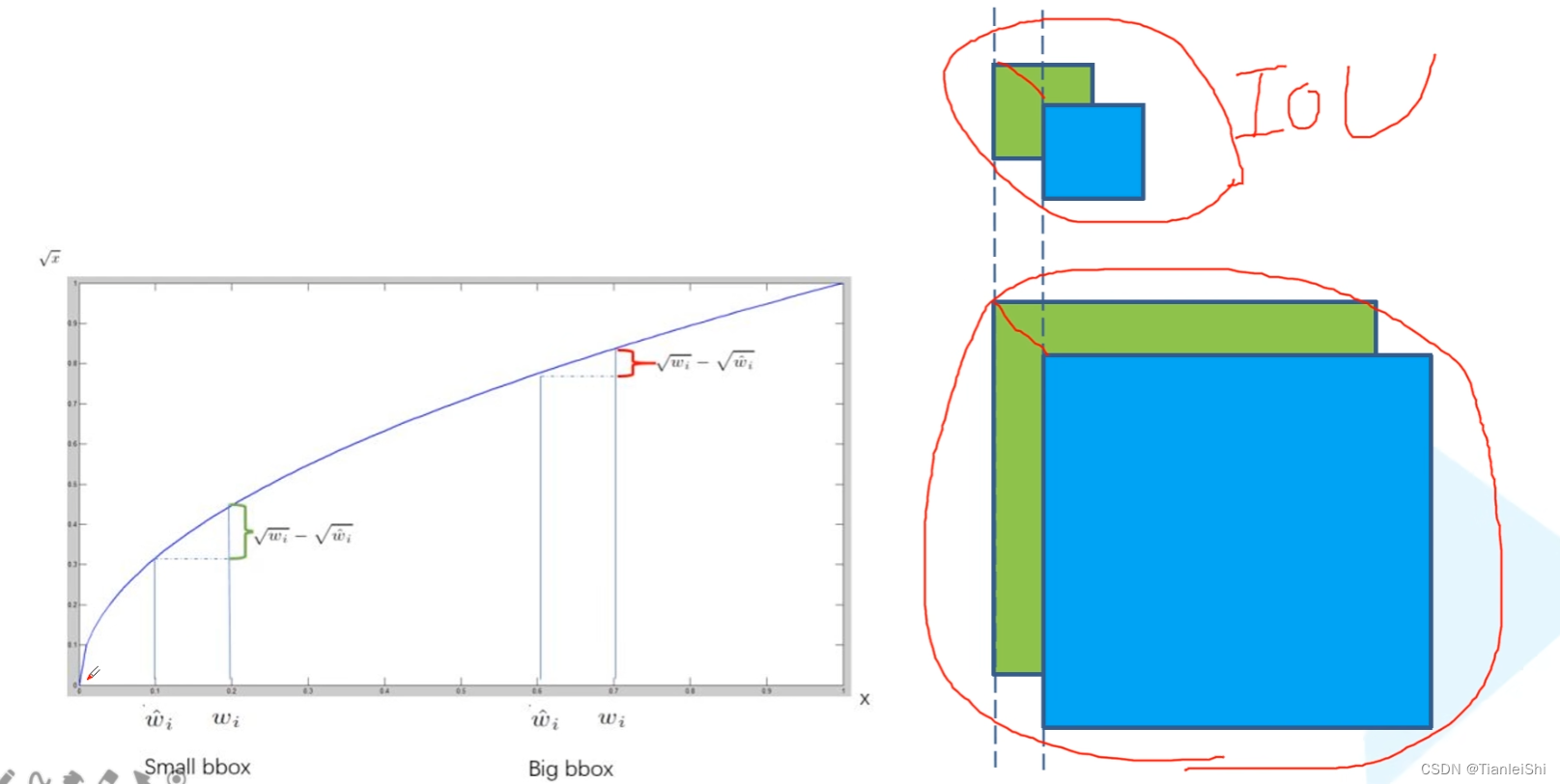
- 注意宽和高的误差求解方式,都进行了一个开根号的处理,为什么要这么做呢?
- 首先假设对于大目标和小目标而言,真实的目标边界框和预测的边界框都有一个相同的偏移(w,h),对于小目标而言IoU变小的很明显,预测结果比较差,但是对于大目标的预测结果还算可以
- 也就是说,无论是大目标还是小目标,我们偏移相同的距离,误差都是一样的,很明显这不是我们想要的结果。我们希望,对于小目标而言,误差更大一点,所以开根号
-
- confidence损失:有目标和没有目标情况
- classes损失:仅计算有目标的情况,若网格中没有目标,则不对分类误差进行反向传播

参考来源:
深度学习在图像处理中的应用(tensorflow2.4以及pytorch1.10实现)_太阳花的小绿豆的博客-CSDN博客_深度学习在图像处理中的应用
霹雳吧啦Wz的个人空间_哔哩哔哩_bilibili