ժҪ
https://arxiv.org/abs/2205.08689
��ȷ�Ľ�ͨԤ����ڳ��н�ͨ���ơ�·�߹滮��������ⶼ��������Ҫ�ġ���ȻĿǰ���������ʱ�շ�������,����ͬ������ͨ���ݵ�ʱ�������Է������в��㡣����,����������������˵�·����ڵ�֮������ʱ���ݱ�����������ض�̬���������������һ�ֻ����������ʱ�ս�����̬ͼ��������(STIDGCN)�����������ͨԤ�����ս���������,���������һ�ֽ���ʽ��̬ͼ�����ṹ,�ýṹ����ͨ���ݰ�����ָ�,��ͨ������ʽѧϰ����ͬ������ָ��Ľ�ͨ���ݵ�ʱ�������ԡ�����ʽѧϰ���Լ���STIDGCN�Գ���Ԥ����Ч�����ǻ������һ����̬ͼ����ģ��,ͨ��һ����ӱ�Ķ�̬ͼ���ɷ���������ͨ�����ж�̬�仯�Ŀռ�����ԡ���̬ͼ���ɷ�����������֪ʶ����������,���ɶ�̬ͼ�ṹ,�����ھ��·�����в��ɼ��Ľڵ�����,ģ��ڵ�֮����ʱ��Ķ�̬���������ĸ���ʵ�Ľ�ͨ�����ݼ��ϵĴ���ʵ�����,STIDGCN�������Ƚ��Ļ��ߡ�
���
�����ӵ�·�������˽�ҳ��켣��������ͨ����¼�ȴ������ռ����ĺ������н�ͨ����,��ͨ���ݷ����ѳ�Ϊ�ǻ۳��з�չ[1]�н�ͨ�滮�����ƺ�״̬�������ɻ�ȱ��һ���֡���ͨԤ�������ù۲����ʷ��ͨ���ݶԳ��ж�̬����Ԥ��,���������ơ�·�߹滮���������Ƚ�ͨ����Ĺؼ���ȷ�Ľ�ͨԤ�������ڼ��ٵ�·ӵ��,�ٽ���ͨ·���ij��й���,������߽�ͨЧ�ʡ�
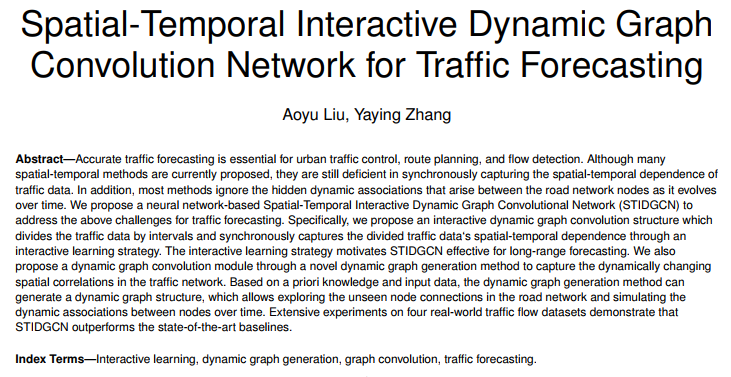
�����ڹ�ȥ�ļ�ʮ����,��ͨԤ��һֱ��һ����Ծ���о��ȵ�,��������һ�������˴������о������Ԥ������,������Ȼ������һЩ��ս����ͨ�����Ǿ��и���ʱ������ԺͶ�̬�ռ�����Ե�ʱ�����ݡ����н�ͨ������Ϊһ��ʱ����������,�����ض��������Ժ�����,�������߷塣��Ч�ز������Ժ�������Ҫ�ܹ�ȷ��������Ͷ��֮�䳤��������ϵ��ģ�͡����,��Щ���ӵ�ʱ�������ʹ�ó���Ԥ�⽻ͨ���ݱ�����ѡ�����,��ʹ�ù�ȥ12ʱ���Ĺ۲⽻ͨ����Ԥ��δ��12ʱ��������ʱ,ͨ��ȷԤ���9 -12ʱ�������ݱ�Ԥ���1 -3ʱ��������Ҫ���ѵöࡣ��ͼ1��ʾ,����·����ͨ���Ĵ��۸���,��ͨ���ݵĶ�̬�ռ������Ҳ�Ƕ������ġ�ͼ1a��ʾ,��ͨ״�������ڿռ����Ӱ�첢��̬�仯������,ijһ·�η�������,��Ӱ���ڽ�·�εĽ�ͨ״��������,ͬһ·���ϲ�ͬ����ij���Ҳ���ܱ��ֳ���ͬ����Ϊ��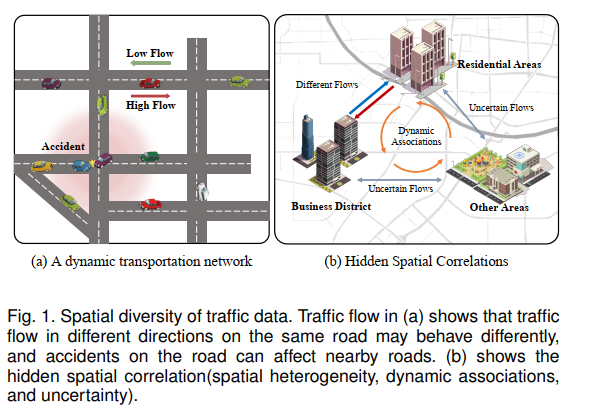
��ͨ��̬�л�����һЩ���صĿռ������,��Щ�������Դ�ڿռ������ԡ���̬�����Ͳ�ȷ���ԡ����������Ŀռ������Ҳ����ͨԤ���������ս����ͼ1b��ʾ,�ռ���������ζ�Ų�ͬ������(���硣(����סլ������Ȧ)�Ľ�ͨģʽ��ͬ,��Ϊ�����в�ͬ���ص�,�����·���͡���·���ȡ�������ָͨ��ȡ���̬�����������������Ľڵ���ʱ����������ֹ������Դ���ʷ��ͨ���ݺ�·���ṹ�еõ�����ȷ������ָ�¼��Խ�ͨ״����Ӱ��,�������仯���ڼ��պ�ͻ���¼���
Ϊ����Ч�ز�ʱ�������,������һЩ�������ѧϰ�ķ������ռ�����Ժ�ʱ��������ڽ�ͨԤ���еõ��˹㷺���о������1��ʾ,һЩ�����ֱ�ʱ������ԺͿռ������,�������Ǵ���������ϡ���Щ�������ܻ����������ʱ�������,�����Ŵ�һЩ����Ҫ������������һЩ����ķ�����ͼͨ�����ռ�ģ��Ƕ�뵽ʱ��ģ������ͬ������ռ��ʱ��������,���ģ���л����Ĺ��ס�Ȼ��,��Щ������ʹ�õ�ʱ��ģ���ڽ�ͨ����֮���ʱ����Ϣ����ѧϰ�����ܵ�����,Ӱ����ģ�Ͷ����������Ժ����Ƶĸ�֪��
Ϊ�˲����صĿռ������,���൱ǰ���о�ͨ����������ڽӾ��������Ƹ����ε�ͼ�ṹ�����1��ʾ,��Щ�о�ͨ����������Ӧ�ڽӾ������϶���ڽӾ������������صĿռ�����ԡ�Ȼ��,��Щ������û�г��������ʷ��ͨ���ݡ���������Ӧ�ڽӾ�����Է���ͼ�ڵ�֮�����ʽ��ϵ,�Ӷ���ǿģ�ͶԿռ������ԵIJ�,������ģ��ѵ����ֹͣ,�����ǹ̶��ġ�������ģ��ͼ�ڵ�֮����ʱ��仯�Ķ�̬���������,��Щ������Ȼ��������Ч�ز������صĿռ�����ԡ�������ʷ�������ݺͳ�ʼ�ڽӾ�����Խ�һ��̽�ֽڵ����ʱ��Ķ�̬������
�������Ͽ���,���������һ��ʱ�ս�����̬ͼ����������(STIDGCN)��̽������������·����̬�����֮�������á����������һ������ʽ��̬ͼ��������������ͨ���ݵ�ʱ�������ԡ�STIDGCN��ͼ����ģ��Ƕ�뵽����ʽѧϰ�ṹ��,����ͬ������ͨ���ݵ�ʱ������ԡ��ýṹ����ʱ�����е�������,�Լ�������н��л��֡����ֵ�������֮��Ľ���ѧϰ̽����ʱ������֮��DZ�ڵĹ�����Ϊ����Ч�ز������صĿռ������,���������һ�ֶ�̬ͼ��������,������ͨ����̬ͼ���ɷ�������������е�����֪ʶ(ͼ�ṹ����ʷ����)��
���������������:
-
�����һ���µ�ʱ��ģ��STIDGCN,��ģ�ͽ�ͼ����Ƕ�뵽����ʽѧϰ�ṹ�С����ܹ�ͬ������ʱ��Ϳռ�����ԡ�ͨ������ʽѧϰ�ṹ�Ͷ�̬ͼ�����������ѧϰʱ��������,�Ӷ�ʵ����Ч��Զ��Ԥ�⡣
-
ͨ����̬ͼ���ɷ���,�����һ�ֶ�̬ͼ�������硣��̬ͼ������Ӧ�Ϳ�ѧϰ�ڽӾ����ں�����,��������Ӧ�ڽӾ����ֿռ�������,��ѧϰ�ڽӾ���ģ��ڵ�֮��Ķ�̬������
-
��֮ǰ�����е��ĸ���ʵ���ݼ��Ͻ����˴���ʵ�顣ʵ��������,�����ģ�����,���ǵ�ģ�;������Ƚ������ܡ�
���ĵ����ಿ����֯����:���ⶨ�����ع����ڵ�2���в���������ķ������ڵ�3������ϸ˵�������Ľڸ�����ʵ�����ͷ��������,�ڵ�5���еó����ۡ�
4 .ʵ����������
Ϊ������STIDGCN������,�������ĸ���ʵ�ĸ��ٹ�·��ͨ�����ݼ��Ͻ����˴�����ʵ��,��ͨ����ʴʵ����֤��ÿ��STIDGCNģ��Ĺ��ܡ�
4.1���ݼ�
�����ǵ�ʵ����,����ʹ�����ĸ���ʵ�Ĺ������ý�ͨ�����ݼ�[19],������PEMS03��PEMS04��PEMS07��PEMS08�������ĸ����ݼ���Caltrans���ܲ���ϵͳ(pms)[43]ÿ30��ʵʱ�ռ�һ�Ρ���Щ�������ձ��ۺϳ�5���ӵ�ʱ��۲�,���һ��Сʱ��12���۲�,���ǵ�Ŀ����Ԥ����һ��Сʱ�Ľ�ͨ���ݡ����ݼ�ϸ�����2��ʾ��ʵ���е�ͼ���ڽӾ����Ǹ�����Щ��ʵ��ͨ·���д�����֮��ľ��빹��ġ�
4.2��������
���ǽ�STIDGCN��15�ֻ��߷��������˱Ƚ�,�������:
-
HA:��ʷƽ��ʹ����ʷ���ݵ�ƽ�������Ԥ��δ�������ݡ�
-
VAR[44]:�����Իع���һ��ʱ������ģ��,�������˽�ͨ���е�ʱ������ԡ�
-
SVR[45]:֧�������ع���һ�ֻ���ѧϰ����,ʹ��֧�����������������н��лع顣
-
LSTM[46]:�����ڼ�����һ�ֻ����������ģ��,������Ч�ز���ʱ�����е�����ԡ�
-
TCN[30]:ʱ�����������ͨ������������ž���ʵ��,��Ч����ʱ����������ԡ�
-
DCRNN[16]:��ɢ����ѭ��������(Diffusion Convolutional recurtional Neural Network)��һ�ֽ������ɢGCN��GRU�ı�����-�������ṹ,���ڲ���ͨ���ݵ�ʱ�������ԡ�
-
STGCN[3]:ʱ��ͼ��������(Spatial-Temporal Graph Convolutional Network)������GCN��һά��������,�Բ���ʱ�������ԡ�
-
ASTGCN[5]:����ע������ʱ��ͼ��������ͨ���ֱ���ƿռ��ʱ��ע�����������ʱ�������ԡ�
-
Graph WaveNet [6]: Graph WaveNet���ſ�TCN��ռ�GCN����,�����һ������Ӧ�ڽӾ�����ѧϰ��̬�ռ�����ԡ�
-
AGCRN[17]:����Ӧͼ����ѭ��������һ��ʹ������Ӧͼ�ṹ��GCN��GRU���������ģ�͡�
-
STSGCN[19]:ʱ��ͬ��ͼ����������һ��GCNģ��,����������ֲ�ʱ��ͼ��ͬ������ʱ�������ԡ�
-
STFGNN[15]:ʱ���ں�ͼ������ͨ�������ɵ�ʱ��ͼִ���ںϲ���,��Ч��ѧϰ���ص�����ԡ�
-
ASTGNN[12]:����ע������ʱ��ͼ��������һ����ע������Ԥ��ģ��,�������ʱ��������ע����ƺͶ�̬GCN��
-
SCINet[31]:���������ͽ�������ʹ�ý��������ṹ,�����������ݵĶ�ֱ��ʴ���,����չ���������Ľ�����
-
STG-NCDE[13]:ʱ��ͼ�����ַ�������ʱ��ncde������ͨ����,��һ���ܿ��ַ��̷�����
4.3����
ʵ��ʹ�õ��������ݼ�����6:2:2�ı�����Ϊѵ��������֤���Ͳ��Լ����ڽ����ݼ��ṩ������֮ǰ,Ӧ��z������һ�����������ݼ�������ȱʧ����������,���ǽ�������,����������Щȱʧ������(ֵΪ0)������ʹ�ù�ȥһСʱ��12������ʱ�䲽��������Ԥ����һСʱδ��12������ʱ�䲽�����ݡ�
ʵ����һ̨Intel? Xeon? Gold 6230 CPU @ 2.10GHz��һ̨NVIDIA Tesla V100 GPU���ļ���������½��С�����ʹ��Ranger�Ż���[47]ѵ��STIDGCN,��ʼѧϰ������Ϊ0.001������С����Ϊ64,ѵ������Ϊ500,��������������ֹͣ���ơ���ģ���ڴ�Լ��300����Ԫʱ������������
����ѡ����������ָ�����������з���������,�ֱ���ƽ���������(MAE)��ƽ���������(MAPE)�;��������(RMSE),��������:
M
A
E
=
1
N
��
i
=
1
N
�O
Y
i
?
Y
^
i
�O
(14)
M A E=\frac{1}{N} \sum_{i=1}^{N}\left|Y_{i}-\hat{Y}_{i}\right| \tag{14}
MAE=N1?i=1��N?�O
�O?Yi??Y^i?�O
�O?(14)
M
A
P
E
=
100
%
N
��
i
=
1
N
�O
Y
i
?
Y
^
i
Y
i
�O
(15)
M A P E=\frac{100 \%}{N} \sum_{i=1}^{N}\left|\frac{Y_{i}-\hat{Y}_{i}}{Y_{i}}\right| \tag{15}
MAPE=N100%?i=1��N?�O
�O?Yi?Yi??Y^i??�O
�O?(15)
R
M
S
E
=
1
N
��
i
=
1
N
(
Y
i
?
Y
^
i
)
2
(16)
R M S E=\sqrt{\frac{1}{N} \sum_{i=1}^{N}\left(Y_{i}-\hat{Y}_{i}\right)^{2}} \tag{16}
RMSE=N1?i=1��N?(Yi??Y^i?)2?(16)
����N������,
Y
i
Y_{i}
Yi?��������,
Y
^
i
\hat{Y}_{i}
Y^i?ΪԤ��ֵ��
4.4����Ƚ������
��3��ʾ��STIDGCN��������ʵ��ͨ�����ݲ��Լ��ϵ���һ��Сʱ(12ʱ�䲽)��Ԥ�����ͱȽ�ģ�͡����������STIDGCN�����ĸ��������ݼ��ϵ������������л��߷���,����PEMS03��PEMS04�е�MAPE����,���ֱ��Բ���ͼ������SCINet��STIDGCN��PEMS07��PEMS08��,����и����Եĸ��ơ���PEMS07��,STIDGCN��MAE��RMSE��MAPE����ֱ������6.1%��4.7%��5.0%����PEMS08��,STIDGCN��MAE��RMSE��MAPE����ֱ������6.5%��2.1%��3.7%��
��3�Ľ������,ͳ�Ʒ���(HA,VAR)����ͳ����ѧϰ����(SVR)��LSTM��TCN�����ܽϲ�,��Ϊ��Щģ��ֻ����ʱ�������,�������˽�ͨ�����и��ӵĿռ�����ԡ�����ͬʱ������ʱ�������,��STGCN��DCRNNΪ������ʱ��GCNģ�����ܽϺá�����,����ע����Ƶ�ģ��(ASTGCN,ASTGNN)Ҳ��������,��Ϊע����ƿ��Բ������е�ʱ������ԡ�ͼ��������������������������һЩģ��(STFGNN, STG-NCDE)��ͼ�����ǽ���ɢGCNǶ��TCN��һ�ַ���,���кܺõ�ʱ������Բ������������ֽ��յ������Բ���ӽ���ʱ��������ͬ��������STSGCNʹ��ͬ������������ʱ������,����ʹ��һ���Ļ�������������ʱ������ԡ���˵��STSGCN������ʱ������ԵIJ���,��ʹ����Ч����ռ�����Ե������,����������Ҳ���Ǻܺá�ֵ��ע�����,��ʹ�����ǿռ������,SCINetҲ��ȡ�����õ����ܡ�����չʾ�˽���ʽѧϰ����Ч�Ժͽ�ͨ���ݿռ佨ģ����Ҫ�ԡ�NCDE��Ϊһ���µ����ѧϰģ��,����ȡ�������õ�Ч��,���������ʱ�������IJ����Ǵ�����,��������ܲ���STIDGCN�����������STIDGCNʹ�ý���ʽѧϰ������ͬ����������ԡ���DGCNģ�����̽��·���в��ɼ��Ľڵ�����,�����صĿռ������,��ģ��ڵ����ʱ�䶯̬���������ɡ�
ͼ4��ʾ������Ԥ��ʱ�䷶Χ������,ģ�͵�һ�������ĸ���ͨ���ݼ��ϵ�MAE��RMSE��MAPE�ı仯���������Ԥ��ˮƽ������,Ԥ���Ѷ�Ҳ�ᷢ���仯;MAE��RMSE��MAPE���������ӡ����������STIDGCNʹ�ý���ʽѧϰ����,��������ѧϰ�˴˵�ʱ������,�Ի�ó���Ԥ����������ͼ4��ʾ,����ע����Ƶ�STIDGCN����ASTGNN,��ʹ���ڳ���Ԥ�ⷽ�档
4.5�����о�
Ϊ�˽�һ������STIDGCN����Щ�����Ӱ��ģ�ͽ���Ĺؼ����,������PEMS04��PEMS08���ݼ��Ͻ�������ʴʵ�顣���������6��STIDGCN����,��������:
-
w/o GCN:��STIDGCN�Ļ�����,ȥ����ɢGCNģ�顣
-
w/o DGCN:��STIDGCN�Ļ�����,��DGCNģ���滻Ϊ��ͨ��ɢGCN�����뵽GCN���ڽӾ�����Ԥ����ij�ʼ�ڽӾ���
-
w/o Conv:��STIDGCN�Ļ�����,�ӽ���ѧϰ�ṹ��ȥ��1D����ģ�顣
-
w/o����:��STIDGCN�Ļ�����,������ѧϰ�ṹ�滻ΪTCN,���붯̬����ģ�鴮����TCN����Ϊ6�����,����ͨ����Ϊ64��
-
w/o Apt Adj:��STIDGCN�Ļ�����,ȥ����DGCNģ�������Ӧ�ڽӾ�������ͼ���������ڽӾ����滻ΪԤ�ȶ���ij�ʼ�ڽӾ���
-
w/oѧϰAdj:��STIDGCN�Ļ�����,ȥ��ͼ�������ṹ,��������Ӧ�ڽӾ���,����DGCNģ���н��ں�GCN��Ϊ��ɢGCN��
����ʵ������ͼ5��ʾ����Щ�����ģ�������Ӱ����PEMS04��PEMS08���ݼ��ϵķֲ��������ơ����ǻ��Ƚ�������ʵ���е�ASTGNN������,GCN����STIDGCN������Ҫ,���,���������IDGCNģ���������ģ�����ܵ����������Ҫ��������չ��֪���һά�����ǽ���ʽѧϰ�ṹ����Ҫ��ɲ���,��ʴʵ�����,�����������ģ�����ܡ���TCN�������ѧϰ�ṹ��,ģ�������½�,��ASTGNN���ۺ���������STIDGCN����֤���ڽ�������ͬ�������������TCN��ASTGNN�������в������Ч������,���Ƕ�DGCNģ���ڶ���������ڽӾ�������������о�,ͼ5��ʾ����Ӧ�ڽӾ����ģ��������Ҫ����ѧϰ�ڽӾ���Ҳ��������Ҫ����,��������Ӧ�ڽӾ���Эͬ���ɶ�̬�ڽӾ�����ͼ5��ʾ,��STIDGCNȥ���˶�̬�ڽӾ���ʱ,ASTGNN����������STIDGCN��˵���˶�̬�ڽӾ�������ͼ�����ı�Ҫ�ԡ���̬�ڽӾ�������ͼ�������õز���ͨ���������صĿռ�����ԡ����,����������������Ľṹ(����ʽѧϰ�Ͷ�̬ͼ����)����Ч�ġ�
4.6��ͬ�ṹ���õ�Ӱ��
Ϊ�˽�һ���о����������ú�ģ�ͽṹ���õ�Ӱ��,������PEMS08���ݼ��Ͻ�����ʵ�顣STIDGCN�������ظ��ѵ�ģ�����ʽ����������,�����ģ�ͽṹ��ص�Ψһ������������ͨ������������ͼ6��ʾ,����ͨ������������Ӱ��STIDGCN��STIDGCN�����ܲ�����������ͨ�����������Ӷ�������ߡ�STIDGCN������������ͨ���������ӵ��ض�ֵʱҲ����ƽ�ȡ�������ͨ����ΧΪ64 ~ 80ʱ,STIDGCN������á�Ȼ��,��������ͨ������������,ģ�Ͳ�������,����ʱ��䳤�����,����ѡȡSTIDGCN������ͨ����Ϊ64����
����,���ǶԻ���ѧϰ�ṹ�е���ģ������һЩ��,��֤��Ŀǰ�Ľṹ��������ġ�����ʽѧϰ�ṹ���ĸ������ľ���ģ���һ��Ȩֵ������DGCNģ����ɡ�����ģ��������ȡ��ǰ�����в�ͬʱ�䲽֮��������,�ؿ��˽���ʽѧϰ��ϵ�ṹ��ģ�͵Ľ�����ͬʱ,Ȩ�ع���DGCNģ����Խ���ʽѧϰ��ͬ���еĿռ�����ԡ����Ƕ�IDGCNģ������������:
-
IDGCN Conv��1:������ʽѧϰ�ṹ�е�4�������ľ���ģ���滻Ϊһ��Ȩֵ�����ľ���ģ�顣
-
IDGCN DGCN��2:����ѧϰ�ṹ�е�Ȩ�ع���DGCNģ�鱻2��������DGCNģ��ȡ��������������DGCNģ��ֱ���������������ѧϰ�Ự�ڼ䲶�����еĿռ�����ԡ�
-
IDGCN DGCN��4:����ѧϰ�ṹ�е�Ȩ�ع���DGCNģ�鱻4��������DGCNģ��ȡ����4��DGCNģ��ֱ�����������ѧϰ�����в������еĿռ�����ԡ�
-
IDGCN Interaction��1:������ѧϰ�ṹ�еĽ���ѧϰ������2����Ϊ1��,��ȥ��2�����������1��ͼ�������㡣
-
IDGCN Interaction��4:������ѧϰ�ṹ�еĽ���ѧϰ������2����Ϊ4��,��IDGCNģ���еĽ���ѧϰ�����ظ����Ρ�
���4��ʾ,�ṹ�仯Ӱ��STIDGCN����4�Ľ������,Ȩֵ��������ģ�鲢���ȵ�������ģ�����Ч��DGCNģ�������෴;����DGCNģ�鲢����������õ����ܡ�Ȩ�طֵ���DGCNģ���൱�ڽ���ѧϰ��DGCNģ��Ķѵ�,ʹSTIDGCN�ڿռ������и���ĸ���Ұ,ʹ�ڵ����Զ�Ľڵ����������������DGCNģ�鲻���ṩ�����Ľ��ճ�,���ܵ���ģ�����ܽϲSTIDGCNʹ��ͬ������������ʽѧϰ�ṹ�е�ʱ�������ԡ����,���ٽ���ѧϰ��������ζ�ż��ٶ�ʱ�������ԵIJ���,���ֲ������ɻᵼ��STIDGCN�����ܱ�ʵ�����,���ֽ���ѧϰ�������Զ������������,����IDGCNģ�������ӽ���ѧϰ�����ᵼ��������������½���
4.7����ʱ��
����һ������,���DZȽ���STIDGCN���5��PEMS08���ݼ��ϵIJ��ֻ���ģ�͵ļ���ɱ���STIDGCN��������,����ɱ��͡���ASTGNN��STGNCDE���������Ƚ��Ļ������,STIDGCN���������ͼ���ɱ���ͬʱʵ���˸��õ����ܡ���ȻASTGNN���н�������,���䴦�����ݵķ�ʽ���Իع��,����ɱ��ϸߡ�ͼ�����ò������ݴ���,ģ��������,����ɱ��͡���ȻSCINet�ļ���ɱ����,���ڻ�ȡ�ռ�����Է�����ڲ��㡣STIDGCN�ļ���ɱ���Ҫ�������佻��ѧϰ�еĶ�̬ͼ�����ṹ��STIDGCN�Է��Իع�ķ�ʽ���д�������,�����ģ�͵�Ч�ʡ�
����
�ڱ�����,���������һ��ʹ�ý���ʽѧϰ���ԵĶ�̬ͼ����ģ��STIDGCN��������˵,���ǽ���̬GCNģ��Ƕ�뵽����ʽѧϰ�ṹ��,��ͬ������ʱ�������ԡ�����ʽѧϰ���Ե�Ӧ�ó����Ǿ���һ�������Ժ������Ե�ʱ������Ԥ�⡣���������һ��DGCNģ����ģ�̬�ռ������,��ʹ�������ʱ����Ϣ���ɶ�̬ͼ�ṹ,����Ԥ�ȶ���ij�ʼ�ڽӾ���Эͬ������DGCNģ��̽����·�����в��ɼ��Ľڵ�����,�Բ������صĿռ������,��ģ��ڵ�֮����ʱ������Ķ�̬����ԡ����ĸ���ʵ���ݼ��ϵ�ʵ�����,ͬ��ѧϰ�Ͷ�̬ͼ�����ɶ���ʱ��Ԥ���DZز����ٵġ����������ģ���������Ƚ��Ļ��ߡ��ڽ���ѧϰ��,����ѧϰ�ڸ��������о��ȷֲ���Ȼ��,����֮�������Բ������Ǿ��ȷֲ��ġ����,������Ϊ�ڻ���ѧϰ��ʹ��ע�������һ���ܺõĸĽ�������