ФПТМ
ТлЮФЕижЗ:https://arxiv.org/abs/1812.04244
ДњТыЕижЗ:GitHub - open-mmlab/OpenPCDet: OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
вЛЁЂТлЮФЖЏЛњ
3DФПБъМьВтЯждкБШНЯSOTAЕФЗНЗЈгаСНжж,вЛжжЪЧНЋЕудЦЭЖгАЕНИЉЪгЭМЩЯ,ЪЙгУ2DЕФМьВтПђМмЁЃвЊУДЪЧБфГЩЙцдђЕФVoxel,етСНжжЗНЗЈдкСПЛЏЙ§ГЬжаЖМДцдкаХЯЂШБЪЇЕФЮЪЬтЁЃЖјЧвзюНќгаШЫЬсГіСЫpointnetКЭpointnet++етжжжБНгДгЕудЦжабЇЯАЬиеїЕФЭјТч,ЫљвдзїепЯыНшМјетСНИі,жБНгДг3DЕудЦжаЛёШЁМьВтПђЁЃЭЌЪБ3DГЁОАжаЮяЬхЖМЪЧздШЛЗжИюЕФ,ЯрЛЅжЎМфУЛгажиЕў,Ыљвд3DЮяЬхЕФЗжИюбкТыЖМФмЭЈЙ§ЫћУЧЕФ3DецЪЕПђжБНгЛёШЁ,ПђФкЕФЕуБЛШЯЮЊЧАОАЕуЁЃ
ЖўЁЂТлЮФЗНЗЈ
ЬсГіСЫвЛИіСННзЖЮЕФAnchor-free3DФПБъМьВтПђМм,PointRCNNЪзДЮжБНгдкЕудЦЪ§ОнЩЯЗжИюmask
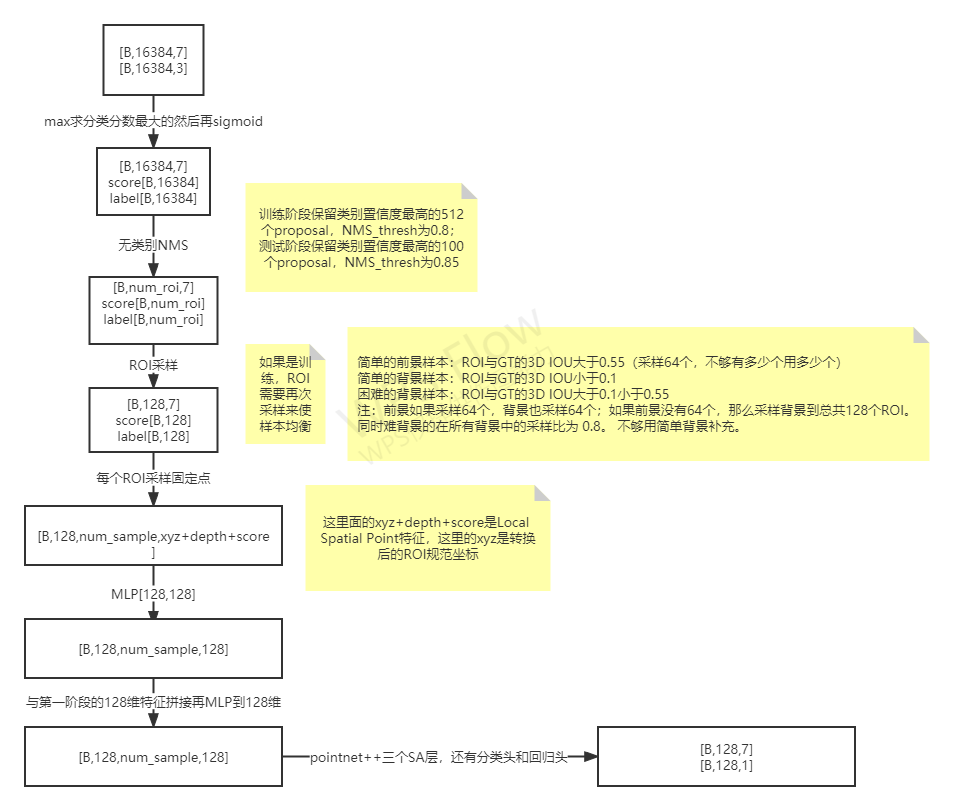
ЕквЛНзЖЮгУвЛИіздЕзЯђЩЯЕФЗНЗЈЩњГЩ3DКђбЁПђ,ЯШЗжИюЧАОАЕу,ЭЌЪБдкетаЉБЛЗжИюГіРДЕФЕужаЩњГЩЩйаЉКђбЁПђЁЃЫќЕФгХЪЦЪЧБмУтСЫдкећИі3DПеМфЪЙгУДѓСПЕФУЊПђЁЃ
ЕкЖўИіНзЖЮЪЧЖдЩњГЩЕФ3DКђбЁПђНјааЮЂЕїЁЃНЋОжВППђФкxyzКЭdepthЩюЖШаХЯЂ,ЗжИюбкТыНјааMLPЩ§ЮЌ,ШЛКѓКЭЕквЛНзЖЮЕФЕуЬиеїНсКЯдйMLPЗжРрЛиЙщЁЃ
ЫќЕФгХЪЦЪЧГфЗжРћгУСЫЕквЛНзЖЮЗжИюКЭЭЦМізгЭјТчЬсЙЉЕФШЋВПаХЯЂЁЃ
ЮЊСЫбЇЯАИќгааЇЕФзјБъЮЂЕї,зїепЛЙЬсГіСЫеыЖдЭЦМіЩњГЩКЭЮЂЕїЕФЭъШЋЛљгкbinЕФ3D boxЛиЙщЫ№ЪЇ,МгЫйСЫЭјТчЕФЪеСВЫйЖШКЭзМШЗТЪЁЃ
Ш§ЁЂЭјТчНсЙЙ

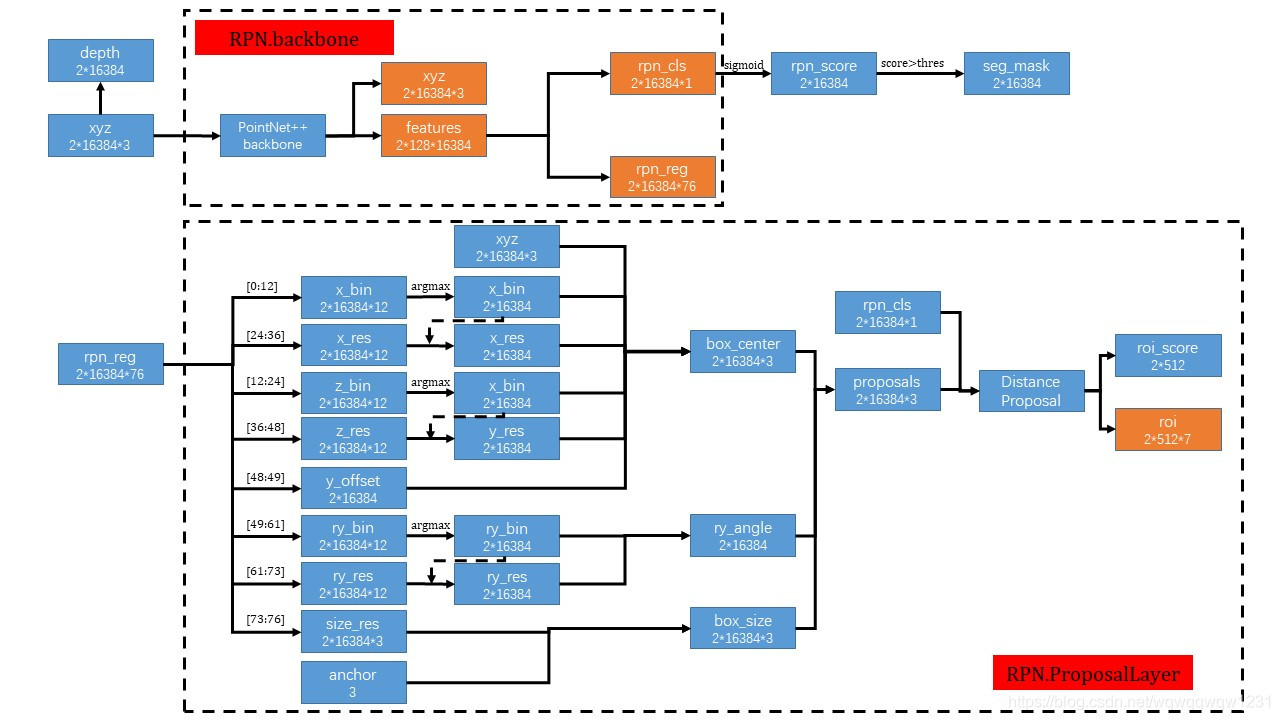
?ЕквЛНзЖЮ
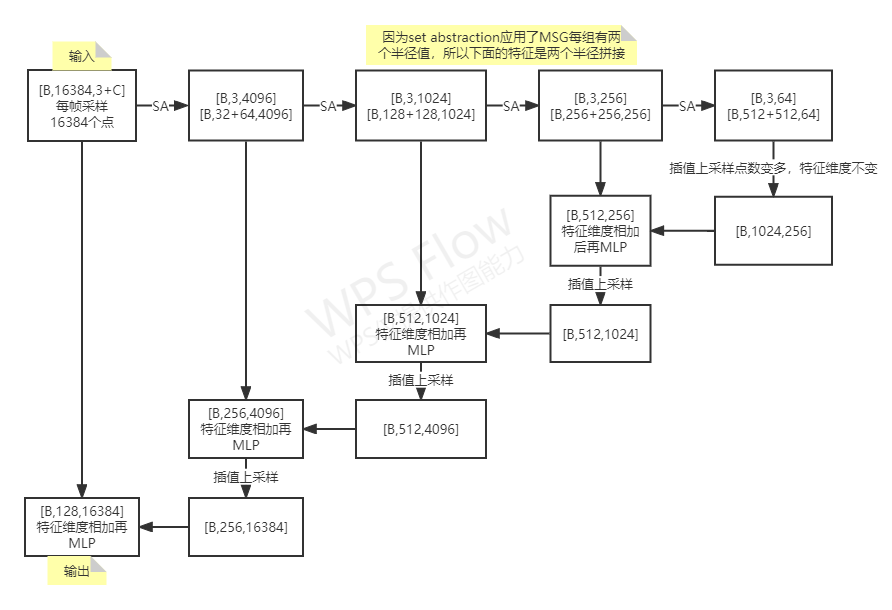
ЮвУЧЭЈЙ§ж№ЕуЕибЇЯАЬиеїРДЗжИюдЪМЕудЦ,ВЂЧвДгЗжИюКУЕФЧАОАЕужаЩњГЩ3DКђбЁПђ,етжжЗНЗЈЮвУЧБмУтСЫЩшжУДѓСПЕФ3DУЊПђ,МЋДѓЕФЯожЦСЫ3DКђбЁПђЕФЩњГЩКђбЁПеМфЁЃЮЊСЫбЇЯАгаЧјБ№ЕФж№ЕуЬиеїРДУшЪідЪМЕудЦ,ЮвУЧЪЙгУДјгаЖрГпЖШЗжзщЕФPointNet++зїЮЊЙЧИЩЭјТч,КѓУцдіМгСЫвЛИіЙРМЦЧАОАбкТыЕФЗжИюЭЗКЭвЛИіЩњГЩ3DКђбЁПђЕФЛиЙщЭЗ,ЭЌЪБНјааЧАОАЗжИюКЭКђбЁПђЛиЙщЁЃЖдгкДѓГпЖШЕФЭтОА,ЧАОАЕуЪ§СПдЖаЁгкБГОАЕу,ЫљвдЮвУЧЪЙгУFocal Loss.
ЫфШЛжЛЪЧДгЧАОАЕуЛиЙщ3DЛиЙщПђЮЛжУ,УЛгаДгБГОАЕуЛиЙщ,ЕЋвђЮЊЕудЦЭјТчЕФИаЪмвА,БГОАЕувВЮЊboxЕФЩњГЩЬсЙЉСЫаХЯЂЁЃЮЊСЫЙРМЦвЛИіФПБъЕФжааФЮЛжУ,ЮвУЧНЋУПИіЧАОАЕужмЮЇЕФxzжсЗжИюГЩвЛЯЕСаРыЩЂЕФbin,ЮвУЧЗЂЯжЖдx-zжсЪЙгУЛљгкbinЕФНЛВцьиЫ№ЪЇЗжРрБШжБНгsmoothL1 LOSSЛиЙщФмЕУГіИќМгОЋШЗТГАєЕФжааФЖЈЮЛЁЃЖјyжсжБНгL1 LossОЭПЩвдЛёЕУОЋШЗЕФyжЕЁЃЮяЬхЕФЗНЯђЙРМЦвВЪЧЛљгкbinЕФ,hwlдђЪЧжБНггЩећИібЕСЗМЏУПИіРрЕФЦНОљГпДчжБНгЛиЙщЕУЕН

?ЮЊСЫвЦГ§ШпгрЕФКђбЁПђ,ЮвУЧЖдФёюЋЭМЕФЖЈЯђIOUЪЙгУNMS,РДЩњГЩЩйаЉИпжЪСПЕФКђбЁПђ,бЕСЗЪБЮвУЧНЋIOUЩшжУЮЊ0.85,NMSБЃСєЧА300ИіИјЖўНзЖЮЁЃЭЦРэЪБ,ЩшжУIOUуажЕЮЊ0.8,NMSБЃСєЧА100ИіИјЖўНзЖЮЁЃ
 ??
??
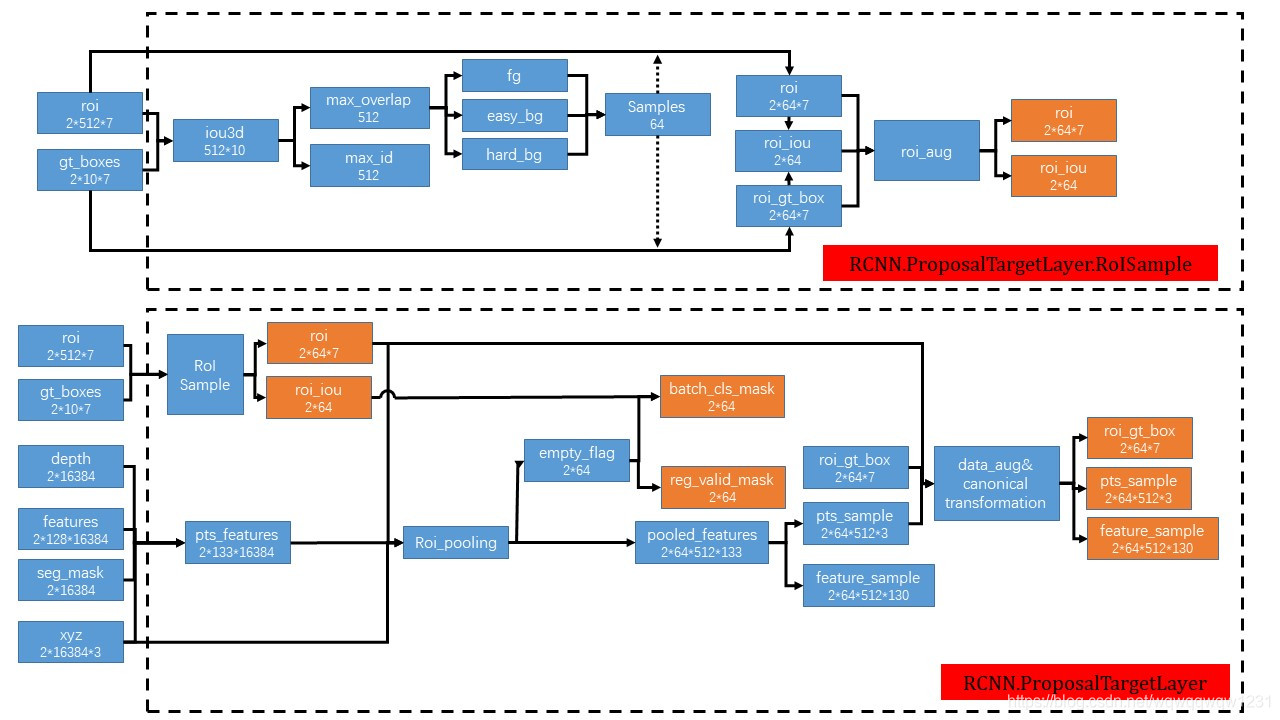
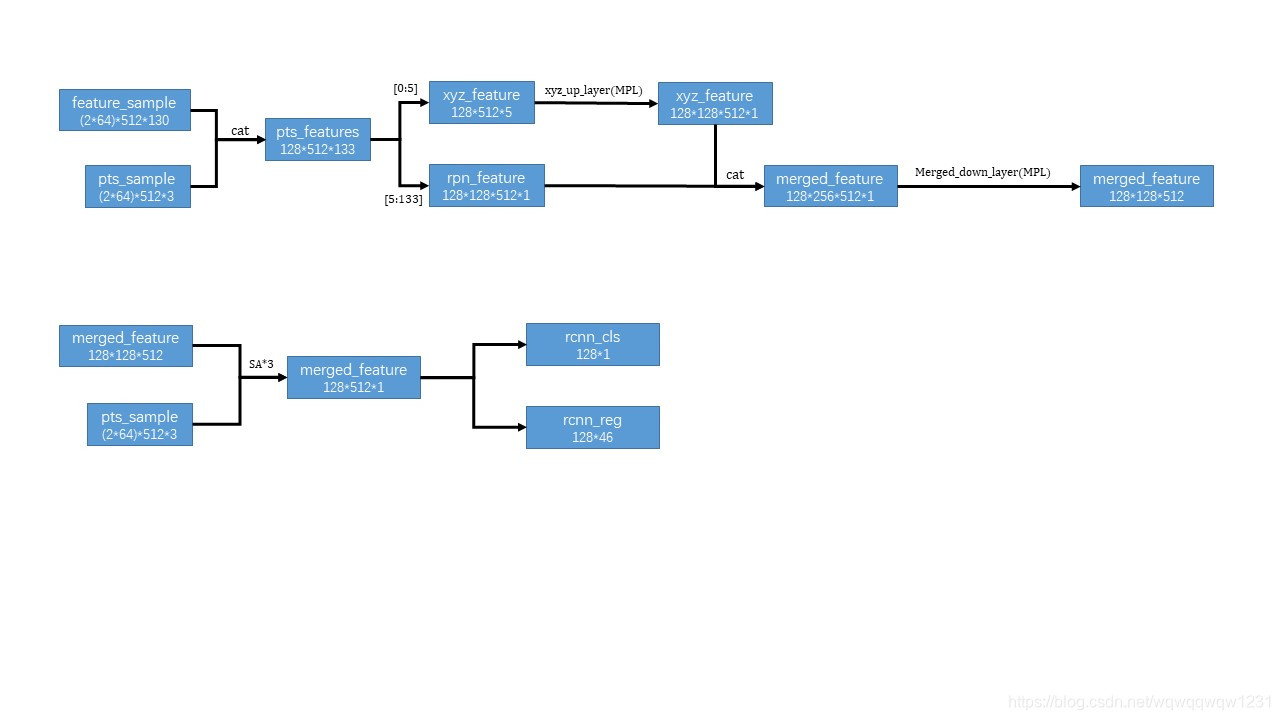
ЕкЖўНзЖЮ
ЮЊСЫбЇЯАУПИіКђбЁПђИќМгОпЬхЕФОжВПЬиеї,ЮвУЧИљОнУПИіЭЦМіПђРДГиЛЏ(ОЭЪЧНЕВЩбљ)ЫќЕФ3DЕувдМАЖдгІЬиеїЁЃЮвУЧЖдКђбЁПђНјааРЉДѓ,РДДгХдБпЛёШЁгагУЕФЛЗОГаХЯЂ,ЖдгкУПвЛИіЕуХаЖЯдкВЛдкРЉДѓЕФПђРя,дкЕФЛАетИіЕуКЭЫћЕФЬиеїОЭБЛБЃСєгУРДЮЂЕїКђбЁПђЁЃКѓУцПђФкзјБъЭГвЛзЊЛЛЮЊе§дђзјБъЯЕЯТЕФОжВПзјБъ,вђЮЊетбљПЩвдИќКУЕФбЇЯАУПИіproposalsЕФОжВПЬиеїЁЃЖдгкУПИіКђбЁПђФкЕФЕу,ЫћЕФОжВППеМфЬиеї,ЗжИюбкТыКЭПеМфОрРыОЙ§MLPгыЕквЛНзЖЮЕуЬиеїНсКЯ,ЮЙНјPointNet++ЭјТчНјаажУаХЖШКЭboxЯИЛЏЁЃ
?Цфжаx,y,z,h,w,l,НЧЖШЕФМЦЫуКЭвЛНзЖЮвЛбљ,гаМИИівВЪЧЛљгкbinЕФ,ВЛЙ§етДЮbinЕФЫбЫїЗЖЮЇИќаЁ,жЛЪЧгУРДЮЂЕїЁЃ
?ЫФЁЂДњТыЗжЮі
ДњТыдТлЮФРяКЭOpenPCdetРяЕФВЛЪЧКмвЛбљ,ЕЋдзїепЫЕOpenPCdetРяаЇЙћИќЮШЖЈ,ЮвУЧвдOpenPCdetДњТыЮЊжїЁЃ
ЕквЛНзЖЮЕудЦЬиеїЬсШЁ
?ЕквЛНзЖЮЗжРрЭЗКЭЛиЙщЭЗ

?ЕкЖўНзЖЮPointRCNNHeadЮЂЕї
(4ЬѕЯћЯЂ) PointRCNNТлЮФКЭж№ДњТыЯъНт_NNNNNathanЕФВЉПЭ-CSDNВЉПЭ_pointrcnnДњТы
(4ЬѕЯћЯЂ) PointRCNNЕФlossМЦЫугыЭЦРэЪЕЯж_NNNNNathanЕФВЉПЭ-CSDNВЉПЭ
?
ЮхЁЂReference
(6ЬѕЯћЯЂ) Point RCNNТлЮФЗвыМАЭМНт_KirutoCodeЕФВЉПЭ-CSDNВЉПЭ
(6ЬѕЯћЯЂ) ЁОДњТыдФЖСЁПPointRCNNЭјТчПЩЪгЛЏ,ДњТыЯъНт_їшїшЙўЖћЕФВЉПЭ-CSDNВЉПЭ_pointrcnnдДТы??????