һ��Ӳ��ԭ��ͼ ??
????????���ǽ����Ŀ���ǽ�itop4412�������ϵ�����led�ƿ����������ȿ�һ��ԭ��ͼ:

?

����GPIO��Ҫ�ĽӿںͶ���
1��Linux������GPIO��ͷ�ļ�
????????�C include/linux/gpio.h
��Ҫ�ṩһЩGPIO��������:

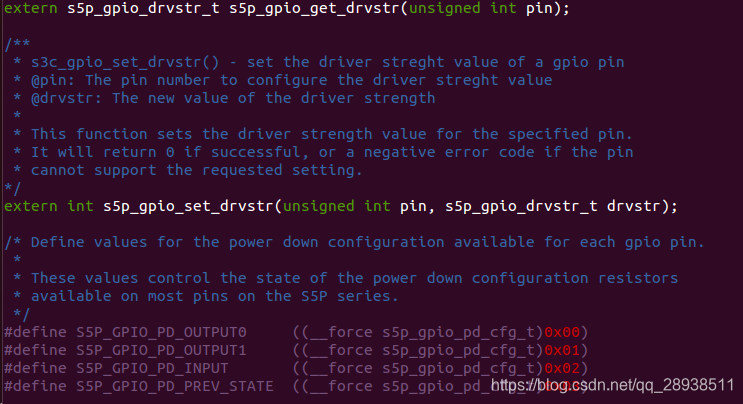
2������ƽ̨��GPIO���ú���ͷ�ļ�
????????�C arch/arm/plat-samsung/include/plat/gpio-cfg.h
? ? ? ? �C �����������д����������ú���
3������ƽ̨EXYNOSϵ��ƽ̨,GPIO���ò����궨��ͷ�ļ�
????????�C arch/arm/mach-exynos/include/mach/gpio.h
????????�C GPIO�ܽ������������ò����ȵ�
????????�C ���ò����ĺ궨��Ӧ����arch/arm/plat-samsung/include/plat/gpio-cfg.h�ļ���
4������ƽ̨4412ƽ̨,GPIO�궨��ͷ�ļ�(������ͷ�ļ�gpio.h��)
????????�C arch/arm/mach-exynos/include/mach/gpio-exynos4.h
????????�C ����4412���������е�GPIO�ĺ궨��
����GPIO������ʼ������
? linuxGPIO���뺯����ֵ����
????????�C gpio_request
????????�C gpio_set_value
? ����ƽ̨����GPIO����
????????�C s3c_gpio_cfgpin
? GPIO�������ģʽ�ĺ����
????????�C S3C_GPIO_OUTPUT
1��leds�������� leds.c :
#include <linux/init.h>
#include <linux/module.h>
/*����ע���ͷ�ļ�,���������Ľṹ���ע���ж�صĺ���*/
#include <linux/platform_device.h>
/*ע�������豸ͷ�ļ�*/
#include <linux/miscdevice.h>
/*ע���豸�ڵ���ļ��ṹ��*/
#include <linux/fs.h>
/*Linux������GPIO��ͷ�ļ�*/
#include <linux/gpio.h>
/*����ƽ̨��GPIO���ú���ͷ�ļ�*/
/*����ƽ̨EXYNOSϵ��ƽ̨,GPIO���ò����궨��ͷ�ļ�*/
#include <plat/gpio-cfg.h>
#include <mach/gpio.h>
/*����ƽ̨4412ƽ̨,GPIO�궨��ͷ�ļ�*/
#include <mach/gpio-exynos4.h>
#define DRIVER_NAME "itop4412_led_ctl"
#define DEVICE_NAME "itop4412_led_ctl"
#define LED_NUM 2
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("TOPEET");
static int led_gpios[LED_NUM] = {
EXYNOS4_GPL2(0),
EXYNOS4_GPK1(1),
};
static long itop4412_led_ioctl( struct file *files, unsigned int cmd, unsigned long arg){
printk("cmd is %d,arg is %d\n", cmd, arg);
if(cmd > 1){
printk("cmd is 0 or 1\n");
}
if(arg >= LED_NUM){
printk("arg is < %d\n",LED_NUM);
}
gpio_set_value(led_gpios[arg],cmd);
return 0;
}
static int leds_open(struct inode *inode, struct file *file){
printk(KERN_EMERG "leds open\n");
return 0;
}
static int leds_release(struct inode *inode, struct file *file){
printk(KERN_EMERG "leds release\n");
return 0;
}
static struct file_operations leds_ops = {
.owner = THIS_MODULE,
.open = leds_open,
.release = leds_release,
.unlocked_ioctl = itop4412_led_ioctl,
};
static struct miscdevice leds_dev = {
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &leds_ops,
};
static int leds_probe(struct platform_device *pdv){
int i;
int ret;
printk(KERN_EMERG "\t leds enter \n");
for(i = 0; i < LED_NUM; i++)
{
ret = gpio_request(led_gpios[i], "LED"); // ����GPIO
if (ret) {
printk("%s: request GPIO %d for LED failed, ret = %d\n", DRIVER_NAME, i, ret);
}
else{
s3c_gpio_cfgpin(led_gpios[i], S3C_GPIO_OUTPUT);
gpio_set_value(led_gpios[i], 1);
}
}
misc_register(&leds_dev);
if(ret<0){
printk("leds:register device failed!\n");
goto exit;
}
return 0;
exit:
misc_deregister(&leds_dev);
return ret;
}
static int leds_remove(struct platform_device *pdv){
printk(KERN_EMERG "\t remove\n");
misc_deregister(&leds_dev);
return 0;
}
static void leds_shutdown(struct platform_device *pdv){
;
}
static int leds_suspend(struct platform_device *pdv,pm_message_t pmt){
return 0;
}
static int leds_resume(struct platform_device *pdv){
return 0;
}
struct platform_driver leds_driver = {
.probe = leds_probe,
.remove = leds_remove,
.shutdown = leds_shutdown,
.suspend = leds_suspend,
.resume = leds_resume,
.driver = {
.name = DRIVER_NAME,
.owner = THIS_MODULE,
}
};
static int leds_init(void)
{
int DriverState;
printk(KERN_EMERG "leds_init enter!\n");
DriverState = platform_driver_register(&leds_driver);
printk(KERN_EMERG "\tDriverState is %d\n",DriverState);
return 0;
}
static void leds_exit(void)
{
printk(KERN_EMERG "leds_exit exit!\n");
platform_driver_unregister(&leds_driver);
}
module_init(leds_init);
module_exit(leds_exit);
2����������Makefile,�ں�Դ��·����ģ�����Ƽǵøij�ƥ�����Լ������,Ȼ�����1��2��һ��,makeһ�¡�����leds.ko
#!/bin/bash
#֪ͨ����������Ҫ����ģ�����ЩԴ��
#�����DZ���itop4412_hello.c����ļ�������м��ļ�itop4412_hello.o
obj-m += leds.o
#Դ��Ŀ¼����,�����û���Ҫ����ʵ�����ѡ��·��
#�����ǽ�Linux��Դ�뿽����Ŀ¼/home/topeet/android4.0�²���ѹ��
KDIR := /home/topeet/android4.0/iTop4412_Kernel_3.0
#��ǰĿ¼����
PWD ?= $(shell pwd)
#make����Ĭ��Ѱ�ҵ�һ��Ŀ��
#make -C����ָ����ִ�е�·��
#$(KDIR)LinuxԴ��Ŀ¼,��������ָ����/home/topeet/android4.0/iTop4412_Kernel_3.0
#$(PWD)��ǰĿ¼����
#modulesҪִ�еIJ���
all:
make -C $(KDIR) M=$(PWD) modules
#make cleanִ�еIJ�����ɾ����Ϊo���ļ�
clean:
rm -rf *.o
3���������������Ӧ�ô��� leds_app.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <string.h>
#define LEDS 2
int main(int argc, char *argv[]){
int fd, i, cmd = 2, led = 2;
char *led_ctl_node = "/dev/itop4412_led_ctl";
char *led0 = "0";
char *led1 = "1";
char *cmd0 = "0";
char *cmd1 = "1";
if(strcmp(argv[1], led0) == 0){
led = 0;
printf("led is 0!\n");
}
if(strcmp(argv[1], led1) == 0){
led = 1;
printf("led is 1!\n");
}
if(strcmp(argv[2], cmd0) == 0){
cmd = 0;
printf("cmd is 0!\n");
}
if(strcmp(argv[2], cmd1) == 0){
cmd = 1;
printf("cmd is 1!\n");
}
/*O_RDWRֻ����,O_NDELAY��������ʽ*/
if((fd = open(led_ctl_node, O_RDWR | O_NDELAY)) < 0){
printf("app open %s failed!\n", led_ctl_node);
}
else{
printf("app open %s success!\n", led_ctl_node);
ioctl(fd, cmd, led);
printf("app ioctl %s ,led is %d,cmd is %d!\n", led_ctl_node, led, cmd);
}
close(fd);
}ͨ��arm-none-linux-gnueabi-gcc -o leds_app leds_app.c -static����һ�¡�����leds_app��
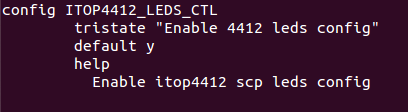
4����drivers/char/Kconfig����һ��menuconfigѡ��
????????���忴<linux�ں������ü�>��
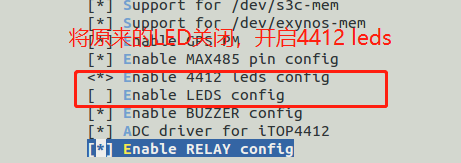
?5������menuconfig
?6���豸ע��
?????????��arch/arm/mach-exynos/mach-itop4412.c��,�������´���,���忴��linux����ƽ̨�豸ע����


?7�������ں�,���������ں��ļ�zImage
?8������leds.koģ��,�ǵ�һ��Ҫ�ȹ��ء�
9������leds_app������:
