原理解释
使用50Hz的不同占空比的PWM波来控制舵机
舵机的控制一般需要一个20ms 50Hz的脉冲,角度对应如下:
t = 0.5ms――――――-舵机会转动 0 °
t = 1.0ms――――――-舵机会转动 45°
t = 1.5ms――――――-舵机会转动 90°
t = 2.0ms――――――-舵机会转动 135°
t = 2.5ms――――――-舵机会转动180°
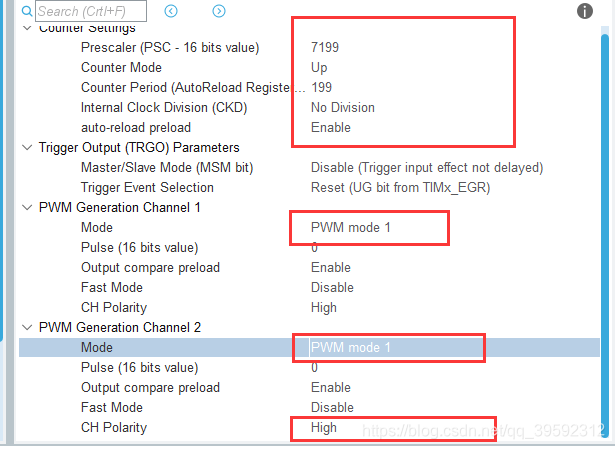
STM32Cube配置
Keil配置
定时器使能
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 7199;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 199;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);//使能TIM3定时器PWM输出
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//使能TIM3定时器PWM输出
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
调节占空比
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, Steering_Engine_Angle);