GPIOѧϰ
CubeMX�ϵ�gpio����
���output����ѡ��

| ѡ�� | ���� | ��ѡģʽ |
|---|---|---|
| GPIO output level | ���ŵ�ƽ���� | High/Low (��/��) |
| GPIO mode | GPIOģʽ | Output Push Pull/Output Open Drain ( �������/��©���) |
| GPIO Pull-up/Pull-dowm | ������������ | Pull-up/Pull-down/No Pull-up and no pull-down (��������/��������/������������) |
| Maxinum output speed | �����ٶ����� | Low/Medium/High (2MHZ ����/25MHZ����/50MHZ����) |
| User Label | �û���ǩ | �������������� ��LED0 |
����input����ѡ��
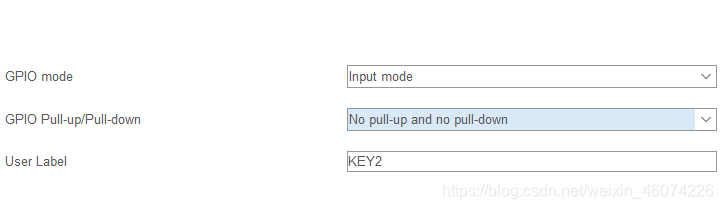
| ѡ�� | ���� | ��ѡģʽ |
|---|---|---|
| GPIO mode | GPIOģʽ | Output Push Pull/Output Open Drain ( ��������/��©����) |
| GPIO Pull-up/Pull-dowm | ������������ | Pull-up/Pull-down/No Pull-up and no pull-down (��������/��������/������������) |
| User Label | �û���ǩ | �������������� KEY0 |
����Ϊ�ⲿ�ж�ʱ������ѡ��
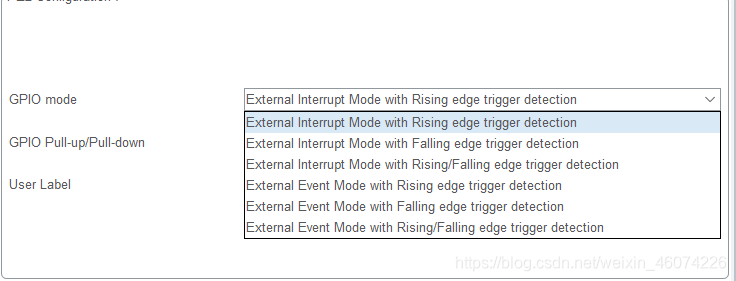
| ѡ�� | ���� | ��ѡģʽ |
|---|---|---|
| GPIO Mode | �ⲿ�ж�ģʽѡ�� | External interrupt with Rising edge triggerdetection(��������Ч�����ⲿ�ж�) |
| External interrupt with Falling edge triggerdetection(�½�����Ч�����ⲿ�ж�) | ||
| External interrupt with Rising /Falling edge triggerdetection(������/�½�����Ч�����ⲿ�ж�) | ||
| External Event Mode with Rising edge trigger detection (��������Ч�����ⲿ�¼�) | ||
| External Event Mode with Falling edge trigger detection(�½�����Ч�����ⲿ�¼�) | ||
| External Event Mode with Rising/Falling edge trigger detection(����/�½�����Ч�����ⲿ�¼�) | ||
| GPIO Pull-up/Pull-dowm | ������������ | Pull-up/Pull-down/No Pull-up and no pull-down (��������/��������/������������) |
| User Label | �û���ǩ | �������������� KEY0 |
ע��:�ж�ģʽ��ָ�ⲿ�źŲ�����ƽ�仯ʱ,EXTI�����źŸ�NVIC����,�Ӷ������ж�,ִ���жϷ�����,��ɶ�Ӧ������
�жϺ��¼��IJ���Դ��һ����,�ж���Ҫ����ʵ����Ӧ����,���¼�����Ӳ��������ִ����Ӧ������ǰ����ҪCPU���빦��ʵ��,����ʵ�ֵĹ��ܸ���,��������CPU����,���и��ߵ���Ӧ�ٶȡ�
�¼�ģʽ��ָ�ⲿ�źŲ�����ƽ�仯ʱ,EXTI��������,����ADC��TIMִ����ز�����
gpio���ļ�����(stm32f1xx_hal_gpio.c)
�ڹٷ���HAL��stm32f1xx_hal_gpio.c�ļ���,���еĺ�������ʹ��˵��,����:
* @brief Reads the specified input port pin. //����
* @param GPIOx: where x can be (A..G depending on device used) to select the GPIO peripheral
* @param GPIO_Pin: specifies the port bit to read. //����˵��
* This parameter can be GPIO_PIN_x where x can be (0..15).
* @retval The input port pin value. //����ֵ
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
//��ʼ��������Ҫ�õ������ŵĹ���ģʽ,�����������ŵĹ����ٶȡ��Ƿ���ģʽ���������ȵȲ�����
void HAL_GPIO_DeInit(GPIO_TypeDef *GPIOx, uint32_t GPIO_Pin)
//����ʼ��֮������Żָ���Ĭ�ϵ�״̬�C�����Ĵ�����λʱ��ֵ
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
//��ȡ������Ҫ֪�������ŵĵ�ƽ״̬����������ֵΪ0��1��
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
//��ij������д0��1,���Dz�Ҫ�����,д1����ʹ��֮�����˼,��Щ�Ĵ���д1�Dz�������˼
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
//��תij�����ŵĵ�ƽ״̬
HAL_StatusTypeDef HAL_GPIO_LockPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
//���һ���ܽŵĵ�ǰ״̬��1,���ܽ�ֵʹ������,������ܽŵ�ƽ�仯ʱ��������ʱ��ֵ,ֱ�����òŸı�
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
//����������ⲿ�жϷ�����,������Ӧ�ⲿ�жϵĴ���,����ʵ����������������,1������жϱ��λ,2�ǵ�������Ҫ���ܵĻص�������ʵ�ʵ��õ����±ߵ��жϻص�����
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
//�жϻص�����,��������Ϊ�жϺ�������Ҫ��Ӧ�Ķ����� ���չٷ���ʾ����Ӧ���ٴζ���ú���,__weak ��һ��������ʶ,��������ĺ�������һ����������,����������������ط�дһ�����ƺͲ�����һģһ���ĺ���,�������ͻ������һ������,��ȥִ����д���Ǹ�����
�����ⲿ�ж�
ʵ������
�ⲿ�ж���������,ʵ�ְ�������LED�ƵĿ���
����KEY0����LED1������
����KEY1����LED0������
���ڰ����Ķ���,ԭ��:�ж����ȼ�û�н�������,������,����Ҫ����,������ж����ȼ���
ʵ���豸
����ԭ����ս��V3 STM32F103ZET6������ѧϰ��
st-link��¼��
�жϹ���(�ж�Ƕ��)
STM32���жϹ����������ں˲���,������оƬ���衣STM32F103ZET6��Cortex-M3�ں˵�IC��Cortex-M3�ں�֧��256���ж�,���а�����16���ں��жϺ�240���ⲿ�ж�,���Ҿ���256(2��8����)���Ŀɱ���ж����á����Ŀɱ���ж����á���STM32��û��ʹ��CM3�ں˵�ȫ������,����ֻ��������һ����:STM32ֻ��84���ж�,����16���ں��жϺ�68���������ж�,����16(4λ)���ɱ�̵��ж����ȼ���
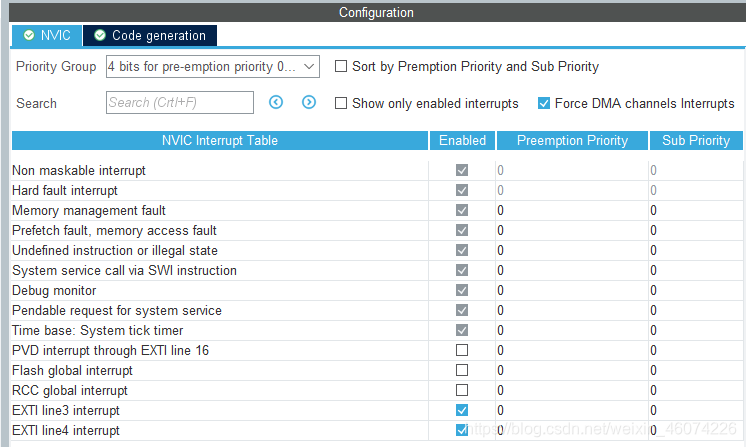
STM32���ж����ȼ�����:STM32���жϷ�Ϊ5����,��0-4���÷������������SCB>AIRCR �Ĵ�����bit10~8������ġ�����ķ����ϵ�����ʾ:
| Column 1 | Column | Column | Column |
|---|---|---|---|
| �� | AIRCR[10:8] | bit[7:4] | ������� |
| 0 | 111 | 0:4 | 0λ��ռ���ȼ�,4λ��Ӧ���ȼ� |
| 1 | 110 | 1:3 | 1λ��ռ���ȼ�,3λ��Ӧ���ȼ� |
| 2 | 101 | 2:2 | 2λ��ռ���ȼ�,2λ��Ӧ���ȼ� |
| 3 | 100 | 3:1 | 3λ��ռ���ȼ�,1λ��Ӧ���ȼ� |
| 4 | 011 | 4:0 | 4λ��ռ���ȼ�,0λ��Ӧ���ȼ� |
����ԭ�ӿ���ָ���ж����ȼ��Ľ���:
����������Ϊ3,��ô��ʱ���е�60���ж�,ÿ���жϵ��ж����ȼĴ����ĸ���λ�е����3λ����ռ���ȼ�,��1λ����Ӧ���ȼ���ÿ���ж�,�����������ռ���ȼ�Ϊ0~7(2^3) ,��Ӧ���ȼ�Ϊ1��0(2^1)����ռ���ȼ��ļ��������Ӧ���ȼ�������ֵԽС�����������ȼ���Խ�ߡ�
������Ҫע������:��һ,��������жϵ���ռ���ȼ�����Ӧ���ȼ�����һ���Ļ�,���ĸ��ж��ȷ�������ִ��;�ڶ�,�����ȼ�����ռ���ȼ��ǿ��Դ�����ڽ��еĵ���ռ���ȼ��жϵġ�����ռ���ȼ���ͬ���ж�,�����ȼ�����Ӧ���ȼ������Դ�ϵ���Ӧ���ȼ����жϡ�
���ʵ��˵��һ��:�ٶ������ж����ȼ���Ϊ2,Ȼ�������ж�3(RTC�ж�)����ռ���ȼ�Ϊ2,��Ӧ���ȼ�Ϊ1���ж�6(�ⲿ�ж�0)����ռ���ȼ�Ϊ3,��Ӧ���ȼ�Ϊ0���ж�7(�ⲿ�ж�1)����ռ���ȼ�Ϊ2,��Ӧ���ȼ�Ϊ0����ô��3���жϵ����ȼ�˳��Ϊ:�ж�7>�ж�3>�ж�6��
���������е��ж�3���ж�7�����Դ���ж�6���жϡ����ж�7���ж�3ȴ����������!
�жϷ�������д��Ҫ��
- ���ܷ���ֵ;
- ������ISR���ݲ���;
- ISRӦ�þ����ܵĶ�С����;
- printf(char *lpFormatString,��)����������������������,������ISR���
���岽��
1.RCC������sys����


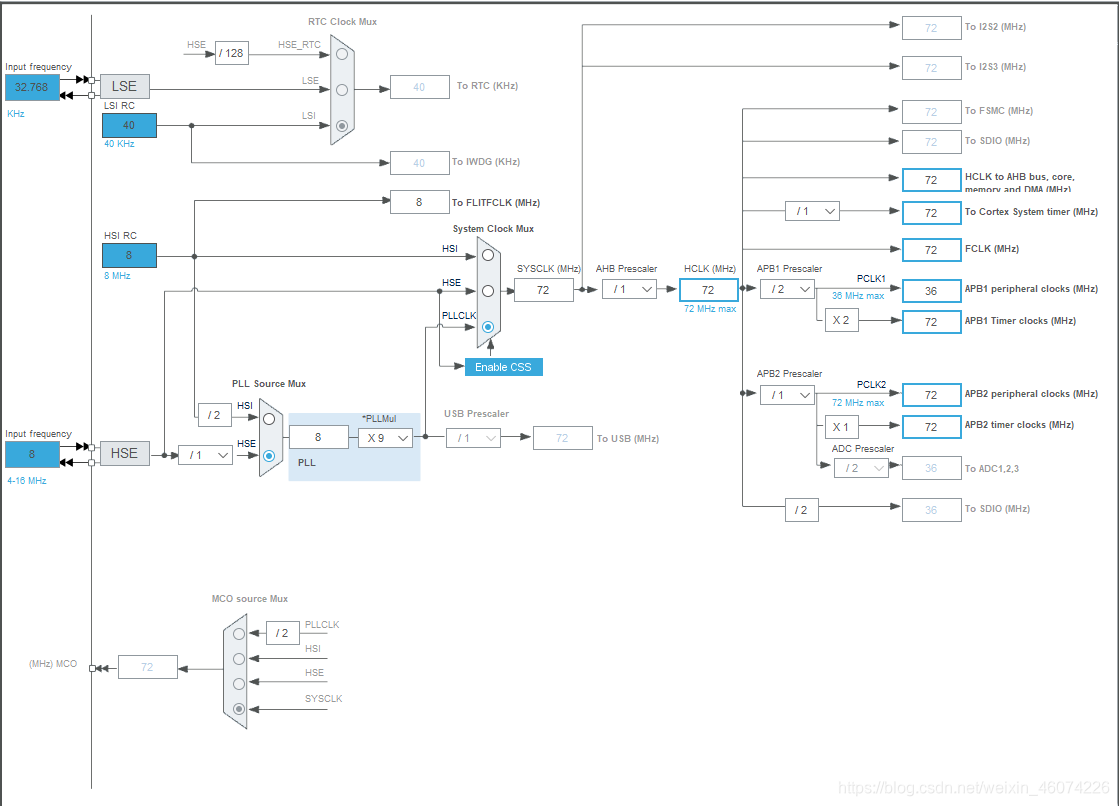
2.ʱ��������
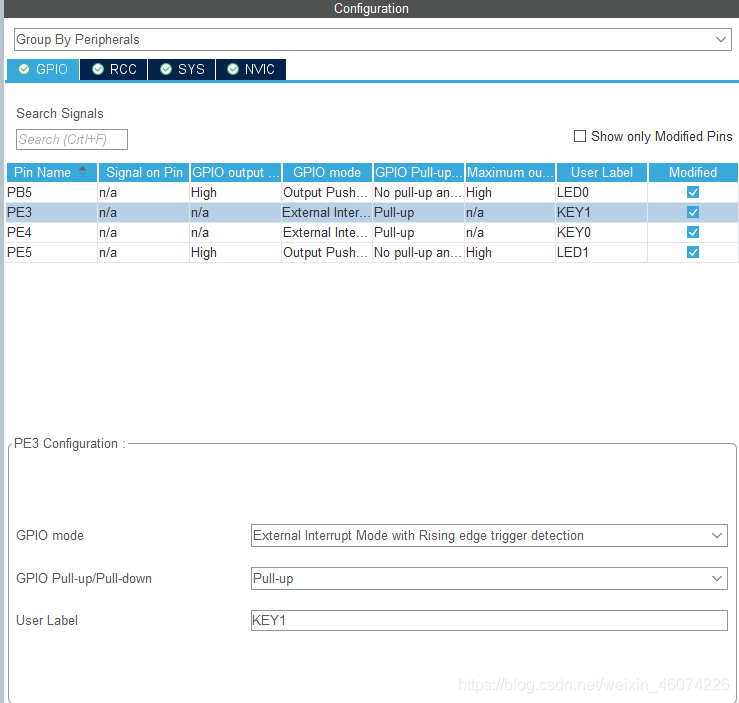
3.GPIO����
4.�ж����ȼ�����
5.��Ŀ����

�����д
Cube MX���ɵ�main.c
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
�����ж����õö�Ӧ������������ stm32f1xx_it.c��
��Ӧ���жϷ���ص���������,��������ֻ��Ҫ��main.c�б�д������Ҫ���жϷ���������
void EXTI3_IRQHandler(void)
{
/* USER CODE BEGIN EXTI3_IRQn 0 */
/* USER CODE END EXTI3_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);
/* USER CODE BEGIN EXTI3_IRQn 1 */
/* USER CODE END EXTI3_IRQn 1 */
}
/**
* @brief This function handles EXTI line4 interrupt.
*/
void EXTI4_IRQHandler(void)
{
/* USER CODE BEGIN EXTI4_IRQn 0 */
/* USER CODE END EXTI4_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_4);
/* USER CODE BEGIN EXTI4_IRQn 1 */
/* USER CODE END EXTI4_IRQn 1 */
}
��main.c�б�д���жϷ�����
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) //��Ĭ�ϵ��ж����ȼ�����ʱ,�����ж�����д��ʱ�����Ῠ��
{
if(GPIO_Pin==KEY0_Pin)
{
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
}
if(GPIO_Pin==KEY1_Pin)
{
HAL_GPIO_TogglePin(LED0_GPIO_Port,LED0_Pin);
}
}
/* USER CODE END 4 */
Դ�ļ����Ե��https://download.csdn.net/download/weixin_46074226/20551206����