Stm32f407zgt6与VL53L0激光测距程序讲解
这里,我是根据别人用stm32f1作为主控板更改的程序,同时他的程序没有LCD显示的程序,通过对程序的理解后,通过增加结构体,最终在主函数中显示距离。
1.VL53L0的简介:
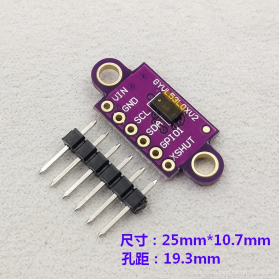
1、VIN:供电电压,可在3V~5V范围内进行供电,但如果自己进行电路搭建的话,则需要一个线性稳压电路,将输入电压稳定在2.8V进行芯片供电和芯片I/O端口的上拉,这个可以自己看它的数据手册;
2、GND:参考地;
3、SCL:I2C通信的时钟线;
4、SDA:I2C通信的数据线;
5、XSHUT:芯片的使能管脚,电平1代表有效,电平0代表无效;
6、GPIO1:芯片的中断管脚。
本文与STM32F407ZGT6的连线如下:
VIN--------------->3.3V
GND------------->GND
SCL-------------->PE0
SDA-------------->PE1
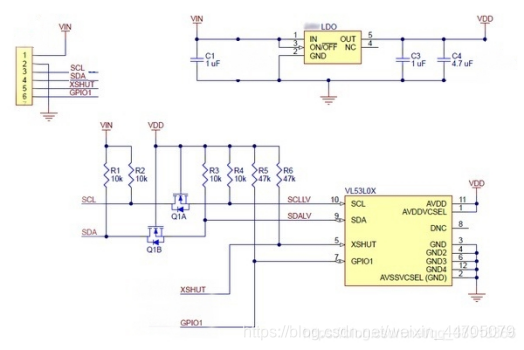
其中XSHUT与GPIO1没有连接,由电路可知,未连接时它们均上拉为高电平,XSHUT一直为高则代表芯片始终有效工作,如果有需要也可以进行连接,用单片机控制。在这里我没有使用到,因此直接不连接就行。
2.这里我主要想说的是程序,这个模块与其他模块的不同之处在于,一般的模块,它都只需要一个.c和一个.h文件,但是因为激光测距模块需要校准,所以它需要的.c和.h文件就比较多了,但好在,官方给的例程里,它的可移植性较强,从f1改到f4的东西也不是特别多,毕竟它也是用IIC通信的。其中,主要有以下.c文件:
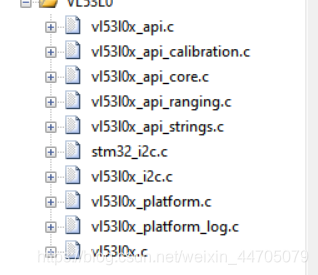
然后就是对应的.h文件,这里我就不一一细列举了,
3.然后就是改错了,具体主要改的就是GPIO引脚初始化,因为F1和F4的GPIO时钟线不同,所以要特别注意,其次是GPIO结构体有些不同,
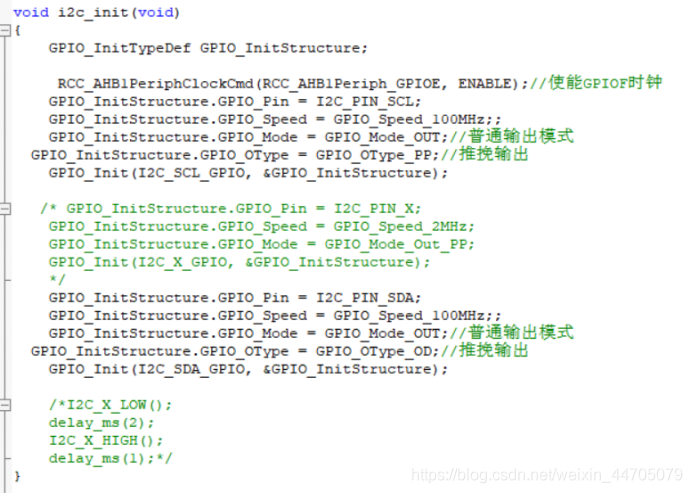
还有就是改

其他细节上的修改挺多,我就不一一细讲了,有什么问题可以私聊我。
4.距离用LCD显示:
首先我们需要在.h文件里定义我们的结构体:
其次我们需要在对应的.c文件里全局声明结构体

最好我们就可以调用结构体里的数据作为我们想要的数据了,这样我们就可以在主函数中调用我们在其他地方定义的数据了

最后改好的例程,我也会放在我的资源里
#include “vl53l0.h”
VL53L0X_Dev_t vl53l0x_dev;
VL53L0X_DeviceInfo_t vl53l0x_dev_info;
VL53L0X_RangingMeasurementData_t vl53l0x_data;
VL53L0X_Error vl53l0x_status;
struct Cmd control ;
/***************************************************************************************/
void print_pal_error(VL53L0X_Error Status)
{
char buf[VL53L0X_MAX_STRING_LENGTH];
VL53L0X_GetPalErrorString(Status, buf); //得到错误码与字符串
printf(“API Status: %i : %s\n”, Status, buf);
}
void print_range_status(VL53L0X_RangingMeasurementData_t* pdata)
{
char buf[VL53L0X_MAX_STRING_LENGTH];
uint8_t RangeStatus;
// New Range Status: data is valid when pdata->RangeStatus = 0
RangeStatus = pdata->RangeStatus;
VL53L0X_GetRangeStatusString(RangeStatus, buf);
printf("Range Status: %i : %s\n", RangeStatus, buf);
}
VL53L0X_Error vl53l0x_start_single_test(VL53L0X_Dev_t *pdev,
VL53L0X_RangingMeasurementData_t *pdata)
{
VL53L0X_Error status = VL53L0X_ERROR_NONE;
if(vl53l0x_status != VL53L0X_ERROR_NONE)
return vl53l0x_status;
status = VL53L0X_PerformSingleRangingMeasurement(pdev, pdata); //VL53L0X执行单一测量范围
if(status != VL53L0X_ERROR_NONE){
printf("error:Call of VL53L0X_PerformSingleRangingMeasurement\r\n");
return status;
}
print_range_status(pdata);
printf("Measured distance: %i\n\r\n", pdata->RangeMilliMeter);
printf("Distance_data:%d\n\r\n", control.Distance_data );
control.Distance_data =pdata->RangeMilliMeter ;//保存最近一次测距测量数据
return status;
}
VL53L0X_Error vl53l0x_measure_init(VL53L0X_Dev_t *pMyDevice)
{
VL53L0X_Error Status = VL53L0X_ERROR_NONE;
//FixPoint1616_t LimitCheckCurrent;
uint32_t refSpadCount;
uint8_t isApertureSpads;
uint8_t VhvSettings;
uint8_t PhaseCal;
// Device Initialization
Status = VL53L0X_StaticInit(pMyDevice); //基本设备初始化
if(Status != VL53L0X_ERROR_NONE){ //判断是否初始化成功 失败打印错误信息
printf ("Call of VL53L0X_StaticInit\n");
print_pal_error(Status);
return Status;
}
// Device Initialization
Status = VL53L0X_PerformRefCalibration(pMyDevice, &VhvSettings, &PhaseCal); //执行参考校准
if(Status != VL53L0X_ERROR_NONE){ //判断是否校准成功
printf ("Call of VL53L0X_PerformRefCalibration\n");
print_pal_error(Status);
return Status;
}
// needed if a coverglass is used and no calibration has been performed
Status = VL53L0X_PerformRefSpadManagement(pMyDevice,&refSpadCount, &isApertureSpads);
if(Status != VL53L0X_ERROR_NONE){
printf ("Call of VL53L0X_PerformRefSpadManagement\n");
printf ("refSpadCount = %d, isApertureSpads = %d\n", refSpadCount, isApertureSpads);
print_pal_error(Status);
return Status;
}
// no need to do this when we use VL53L0X_PerformSingleRangingMeasurement 当我们使用VL53L0X_PerformSingleRangingMeasurement不需要
Status = VL53L0X_SetDeviceMode(pMyDevice, VL53L0X_DEVICEMODE_SINGLE_RANGING); // Setup in single ranging mode 设置单一测量模式
if(Status != VL53L0X_ERROR_NONE){
printf ("Call of VL53L0X_SetDeviceMode\n");
print_pal_error(Status);
return Status;
}
// Enable/Disable Sigma and Signal check
if(Status == VL53L0X_ERROR_NONE){
Status = VL53L0X_SetLimitCheckEnable(pMyDevice, //启用/禁用特定限制检查
VL53L0X_CHECKENABLE_SIGMA_FINAL_RANGE, 1);
}
if(Status == VL53L0X_ERROR_NONE){
Status = VL53L0X_SetLimitCheckEnable(pMyDevice,
VL53L0X_CHECKENABLE_SIGNAL_RATE_FINAL_RANGE, 1);
}
if(Status == VL53L0X_ERROR_NONE){
Status = VL53L0X_SetLimitCheckValue(pMyDevice,
VL53L0X_CHECKENABLE_SIGNAL_RATE_FINAL_RANGE,
(FixPoint1616_t)(0.25*65536));
}
if(Status == VL53L0X_ERROR_NONE){
Status = VL53L0X_SetLimitCheckValue(pMyDevice,
VL53L0X_CHECKENABLE_SIGMA_FINAL_RANGE,
(FixPoint1616_t)(18*65536));
}
if(Status == VL53L0X_ERROR_NONE){
Status = VL53L0X_SetMeasurementTimingBudgetMicroSeconds(pMyDevice, //设置微秒时间
200000);
}
if(Status != VL53L0X_ERROR_NONE){
printf ("Sigma and Signal check error\n");
print_pal_error(Status);
return Status;
}
/*
* Step 4 : Test ranging mode
*/
/* for(i=0;i<10;i++){
printf (“Call of VL53L0X_PerformSingleRangingMeasurement\n”);
Status = VL53L0X_PerformSingleRangingMeasurement(pMyDevice,
&vl53l0x_data);
print_pal_error(Status);
print_range_status(&vl53l0x_data);
VL53L0X_GetLimitCheckCurrent(pMyDevice,
VL53L0X_CHECKENABLE_RANGE_IGNORE_THRESHOLD, &LimitCheckCurrent);
printf("RANGE IGNORE THRESHOLD: %f\n\n", (float)LimitCheckCurrent/65536.0);
if (Status != VL53L0X_ERROR_NONE) break;
printf("Measured distance: %i\n\n", vl53l0x_data.RangeMilliMeter);
}
*/
return Status; //返回0
}
VL53L0X_Error vl53l0x_init(void)
{
VL53L0X_Error Status = VL53L0X_ERROR_NONE; //初始值赋值为0
VL53L0X_Dev_t *pMyDevice = &vl53l0x_dev; //得到设备地址
pMyDevice->I2cDevAddr = 0x52; //iic地址
pMyDevice->comms_type = 1; //选择IIC还是SPI iic=1;SPI=0
pMyDevice->comms_speed_khz = 400; //iic速率
VL53L0X_i2c_init(); //IIC配置
Status = VL53L0X_DataInit(pMyDevice); // Data initialization //VL53L0X_DataInit:一次设备的初始化,初始化成功返回0
if(Status != VL53L0X_ERROR_NONE){ //判断如果状态不为0 打印错误信息
print_pal_error(Status);
return Status; // 返回错误值 可通过此值DEBUG查找错误位置
}
Status = VL53L0X_GetDeviceInfo(pMyDevice, &vl53l0x_dev_info); //读取给定设备的设备信息
if(Status != VL53L0X_ERROR_NONE){
print_pal_error(Status);
return Status;
}
printf("VL53L0X_GetDeviceInfo:\n");
printf("Device Name : %s\n", vl53l0x_dev_info.Name); //设备名
printf("Device Type : %s\n", vl53l0x_dev_info.Type); //产品类型VL53L0X = 1, VL53L1 = 2
printf("Device ID : %s\n", vl53l0x_dev_info.ProductId); // 设备ID
printf("ProductRevisionMajor : %d\n", vl53l0x_dev_info.ProductRevisionMajor);
printf("ProductRevisionMinor : %d\n", vl53l0x_dev_info.ProductRevisionMinor);
if ((vl53l0x_dev_info.ProductRevisionMajor != 1) && (vl53l0x_dev_info.ProductRevisionMinor != 1)){
printf("Error expected cut 1.1 but found cut %d.%d\n",
vl53l0x_dev_info.ProductRevisionMajor, vl53l0x_dev_info.ProductRevisionMinor);
Status = VL53L0X_ERROR_NOT_SUPPORTED;
print_pal_error(Status);
return Status;
}
Status = vl53l0x_measure_init(pMyDevice); //测量配置
vl53l0x_status = Status;
if(Status != VL53L0X_ERROR_NONE){ //判断如果不为0打印错误信息
print_pal_error(Status);
return Status;
}
return Status; //返回0
}