�ջ�����ϵͳ

������(Ŀ��ת��)�������ǵ�Ŀ��ֵ,��ȥ���װ�ô�������ʵ��ֵ(��������õ�ת��),����ʵ��ƫ���ƫ�����뵽������(STM32),����֮�����ִ�л���(������͵��),�����������
��ͨ��λʽ�����㷨
�ص�:
1.����źűȽϵ�һ,Ҫô�Ǹߵ�ѹҪô�ǵ͵�ѹ��
2.����źŵ�������,�����ǰֵС���趨ֵ,���ֵ���趨��;�����ǰֵ��С���趨ֵ,���ֵ���趨��;���㷨ֻ�ǵ�ǰֵ��ʵ��ֵ�ļȽϡ�
3.ֻ���ǿ��ƶ���ǰ��״ֵ̬��
**ȱ��:**���ڿ��ƶ����ڹ���,(ִ�в����������õ����ƶ�����,���ᵼ�¿��ƶ��������仯,���������仯������й���),����,����ǰֵ���ڵ����趨ֵʱ,���ֵ�趨Ϊ��,�������ڹ���,��ǰֵ�����������Ȼ�����ڴ�ʱ���ֵΪ��,���Ե�ǰֵ����С,�����ֵ�ǰֵС���趨ֵʱ,���ֵ�趨Ϊ��,�������ڹ���,��ǰֵ���������С�������ͻᵼ��,��ǰֵ��Զ���趨ֵ���²���,�����Ǹպôﵽ�趨ֵ��
PID�����㷨
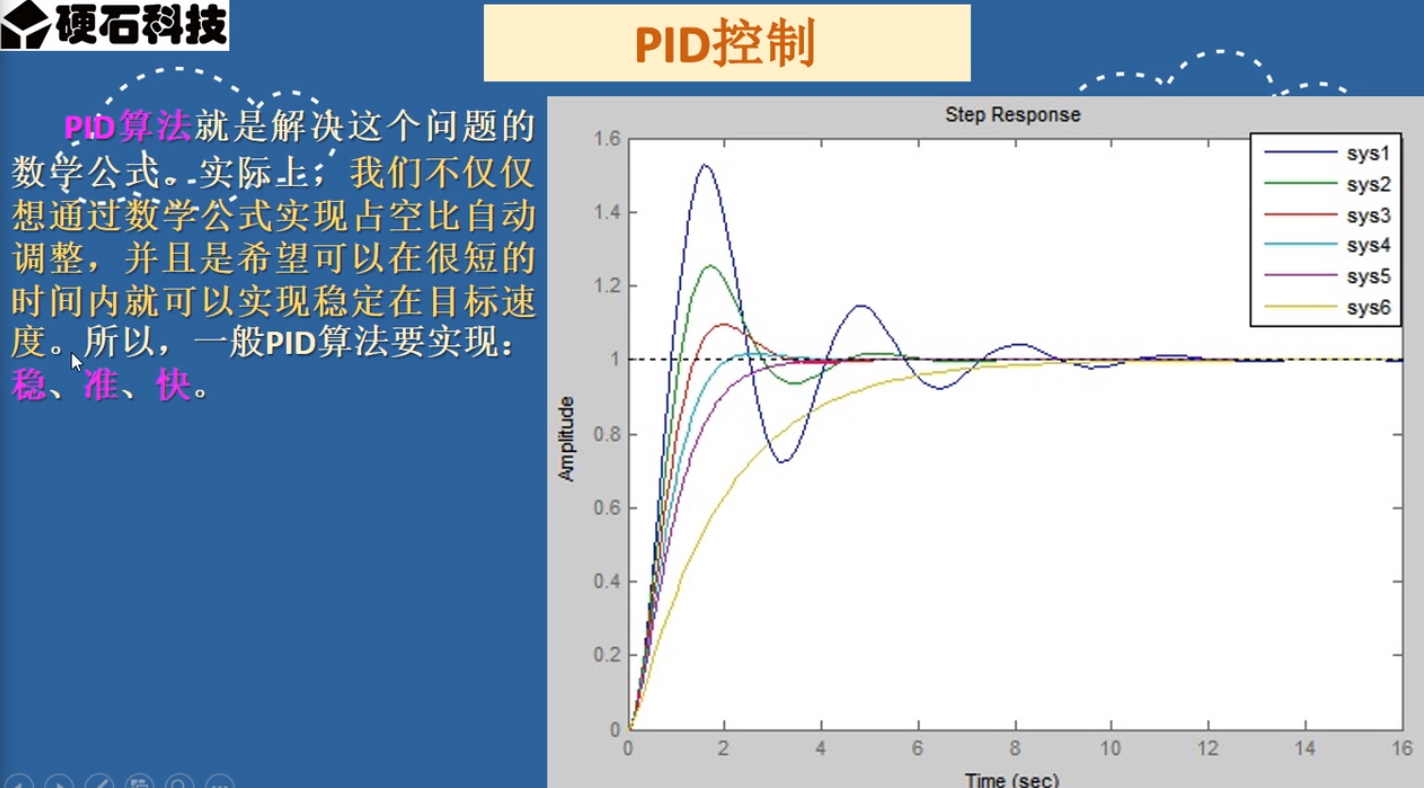
PID�����㷨
˼��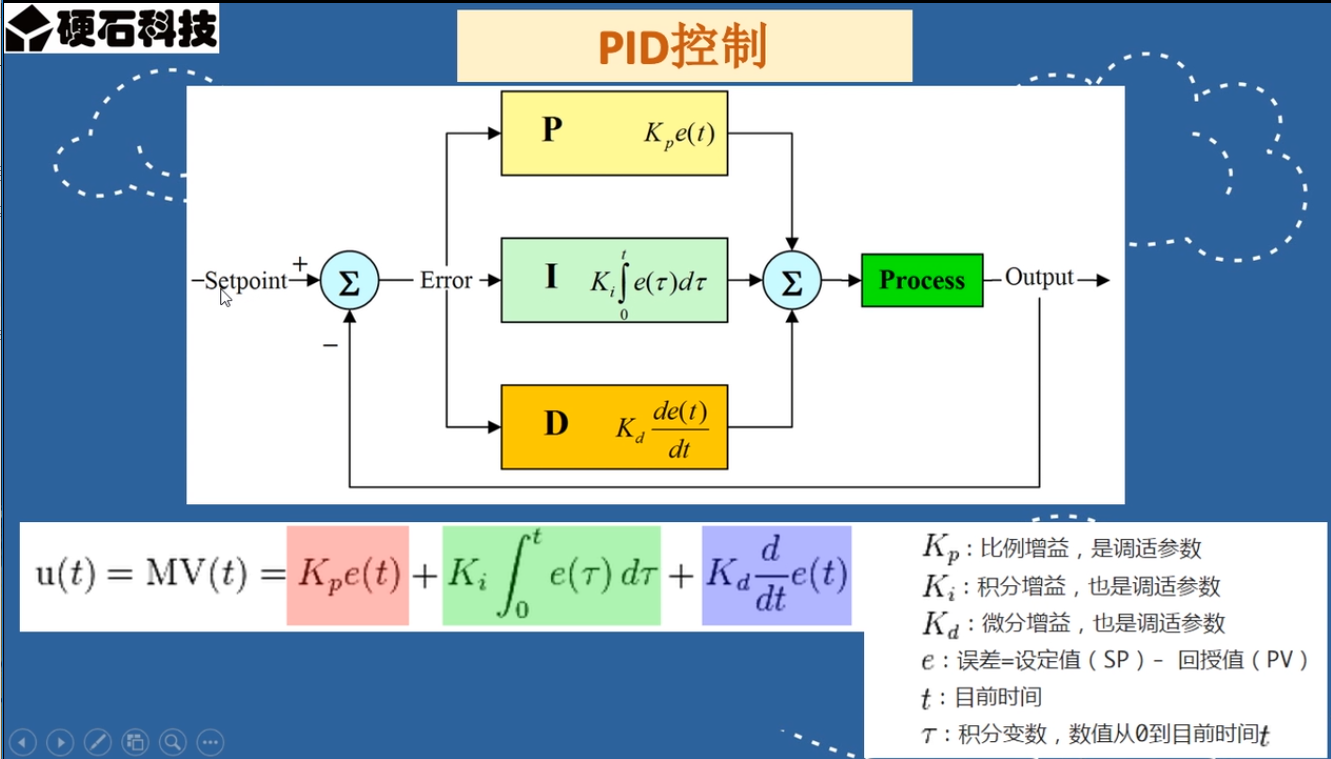
P��I��Dʵ������ͬʱ�����˵�ǰƫ���ʷƫ����(��ǰƫ���ǰ������)ƫ�Ȼ�������ƫ��������Ե���,�γ����ֵ��
ǰ���ϵ��K,ʵ����һ���Ŵ�������˥������
�㷨����
���贫����ÿ1s��ȡһ�ε�ǰֵ,��i���ΪXi,�������в��������ݴ洢������
��ô��k��ĵ�ǰƫ��Ϊ
Ek���ܴ��ڡ����ڡ�С��0��
��������
���ֿ���
���ǰ����вɼ����ĵ�ǰƫ���ӡ�
��Sk>0,˵����ȥ���ʱ��,����������δ����;Sk=0�ļ��ʺ�С,˵����ʷ���������Ǵ���;Sk<0,˵����ȥ���ʱ��,���������dz����;

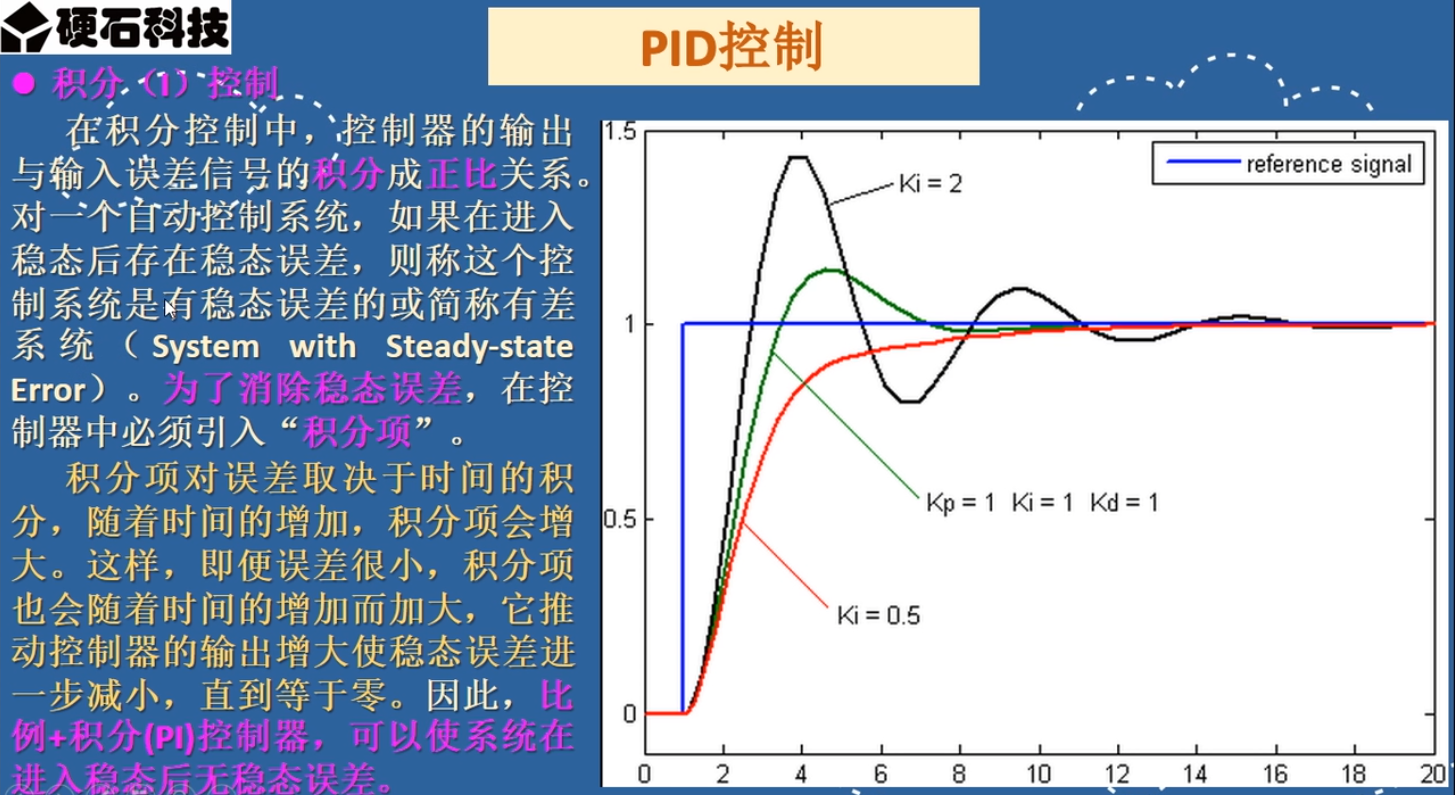
���ܵ�������I����,���������Pһ��������,��Ҫ����Ϊ������P���Ƶ���̬��
�����ֵ��һ�ε���Ŀ��ֵ֮ǰ,���ֿ��ƶ�ϵͳ�Dz����ġ���Ϊ,�������ʷƫ���ۼ�Ϊһ���ܴ��ֵ,��ô����ʱ��ǰֵǡ�ô��,ȴ���������������,��ô���ԾͰ��������������,Ȼ����ͨ�����ֿ���������˥����ǰֵ,��ɵ�ǰֵ���趨ֵ������һ�ᡣ
�ֿ���
ֻ��������ε�ƫ����д���,Ԥ�������ƫ��ı仯���ơ�
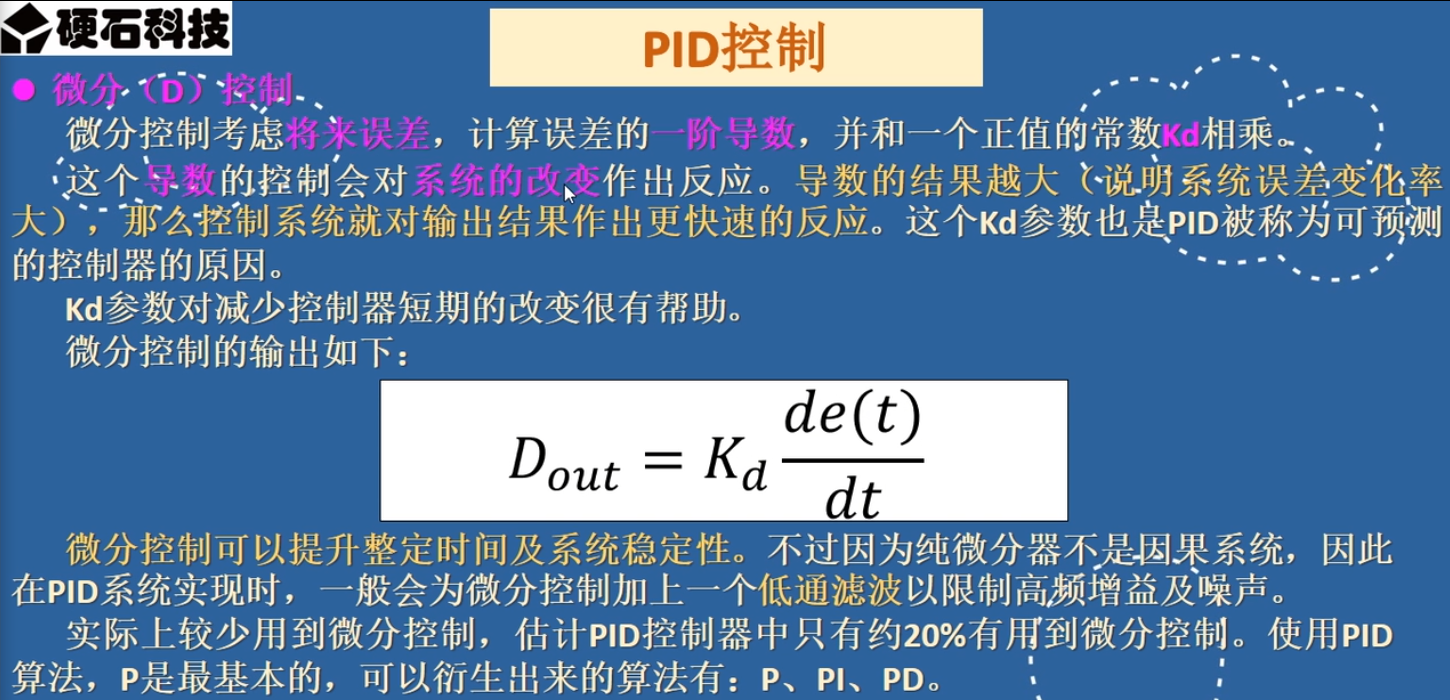
���ܵ�������D����,���������Pһ��������,��Ҫ����Ϊ����ƫ��ӽ�0ʱ(ƫ��ı仯���Ƶ���0),����ƫ������þͱ�Ϊ0��

λ��ʽ������ʽPID�㷨

λ��ʽPID�㷨
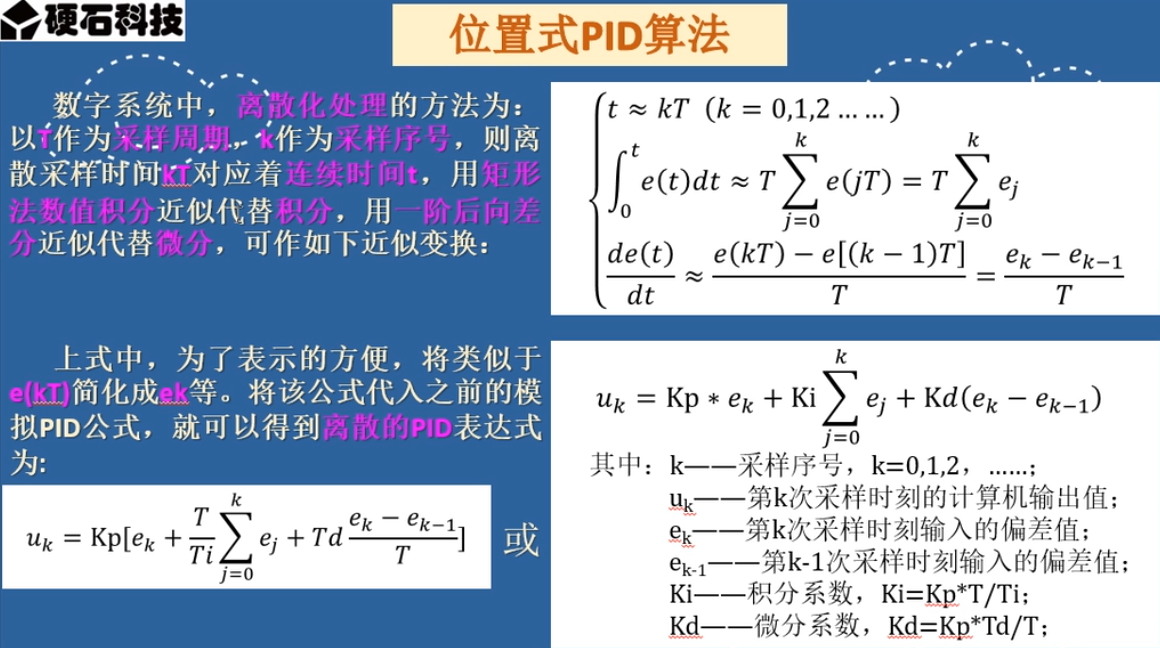
1.TΪ��������(��������),Ҳ��PID�㷨�������������,������С�ڿ�������(PWM�źŵ�����)��Ҳ����̫��,̫���˻�����ֿ���ʧЧ����ֵ���ǹ̶���,Ҫ���ݲ�ͬʵ�����������
2.TiΪ����ʱ��,��PI��ͬ���õ�ʱ��;��ֵ���ǹ̶���,Ҫ���ݲ�ͬʵ������������������һ�ε���Ŀ��ֵ֮ǰ,��Ti���õĴ�һ��,�û��ֿ��ƾ�����ҪӰ�쵽ϵͳ;���������һ�ε���Ŀ��ֵ֮��,���ֿ��Ƶ����ò����ֳ�����
3.TdΪ��ʱ��,��PD��ͬ���õ�ʱ��;��ֵ���ǹ̶���,Ҫ���ݲ�ͬʵ�����������
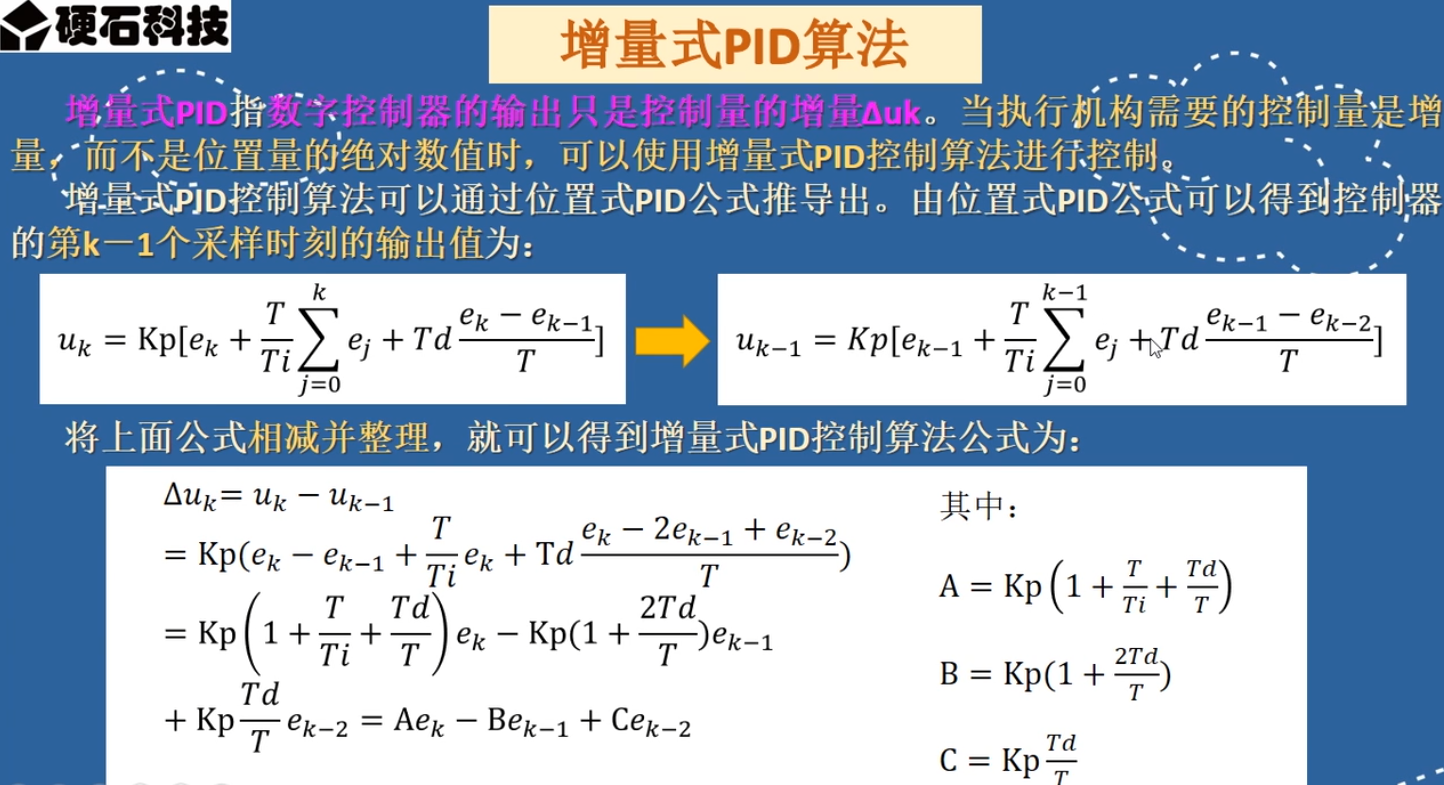
����ʽPID�㷨
EkΪ��ǰƫ��ֵ,E(k-1)Ϊ�ϴ�ƫ��ֵ��
����ʽPID�ٶȱջ��������
�ڽ�PID���ڵ������ʱ,�����PID����������DZ���������ֵ��Ŀ��λ��,�ҵ����PWM�Ǹ�ʲô������?���PWM������-1��+1��ռ�ձ�,Ҳ�����DZȽϼĴ�������ֵ,����ARR��3000,PWM���������1500,����PWMռ�ձ�50%,���еĻ���,�����ҵ�encoder��1000,target��2000,��ôpid.ek
= 1000,����pid.kp = 10����,��ôpid.kp*pid.ek = 10000,Ҳ����˵������pwm�������ռ�ձ�-1�C+1�Ļ�,ԶԶ�������ķ�Χ,���Dz������������߹�ʽ��������?�����Dz���pwm���������岻����?��ʵ��û�й�ϵ��,��Ϊ���ռ���10000����1,PWM=1,��ô��ȫ����ռ�ձ�1����,�ȵ�encoder=targetʱ,pwm=0,����Ͳ����˶���,������Ŀ��λ��;��������Ҫ���Ѵ��,encoder��target������������ֵ,���ߵIJ�ֵ�϶�������,����pid.kp=10֮��,�϶�����1,����PWMʼ����100%ռ�ձ�,�����п���ʱ�����ҵ�Ŀ��λ��,����pid.kp=10����������þͲ�����,��������pid.kp=0.001,��encoder��target��ֵ�����1000����,PWM�Ϳ�����-1�C+1֮��,����������������������,����kp��ֵ�����Ǵ����������,Ҫ���ݿ�������ʵ����������ֵ��ʵ������,�趨����,����ʵ�������äĿϹ����������ʵ��䷴��
�������������������������������� ��Ȩ����:��������CSDN����������������ԭ������,��ѭCC 4.0
BY-SA��ȨЭ��,ת���븽��ԭ�ij������Ӽ���������
ԭ������:https://blog.csdn.net/u014453443/article/details/100573722
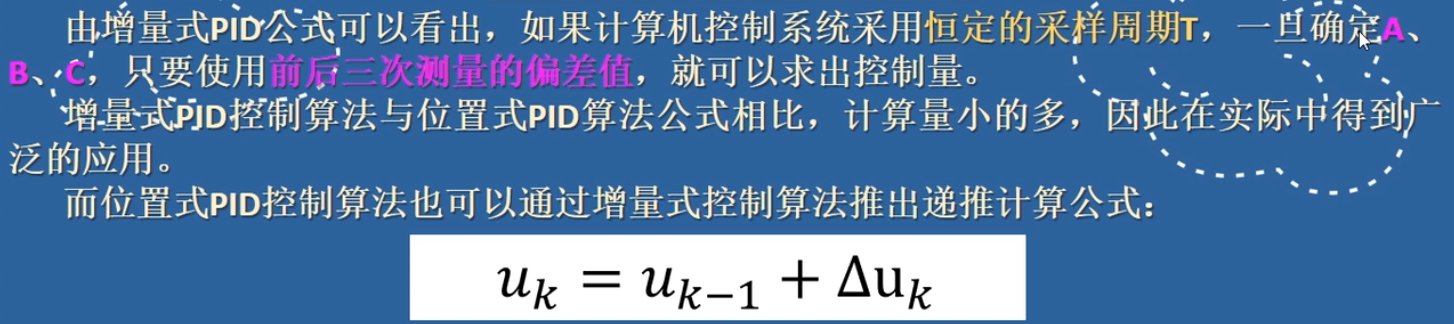
����ʽ��λ��ʽPID������
����ʽ��λ��ʽ����:
1����ʽ�㷨����Ҫ���ۼ�,������������ȷ�������������ƫ�����ֵ�й�,�������Կ���
�������Ӱ���С����λ��ʽ�㷨Ҫ�õ���ȥƫ����ۼ�ֵ,���ײ����ϴ���ۼ���2����ʽ�㷨�ó����ǿ�����������,�����ڷ��ſ�����,ֻ������ſ��ȵı仯����,����
Ӱ��С,��Ҫʱ����ͨ�����ж����ƻ��ֹ�������,��������Ӱ��ϵͳ�Ĺ����� ��λ��ʽ�����ֱ�Ӷ�Ӧ��������,��˶�ϵͳӰ��ϴ�3����ʽPID����������ǿ���������,����������,��˸÷���������ִ�л��������ֲ����Ķ���,�粽�������,��λ��ʽPID������ִ�л����������ֲ����Ķ���,���Һ�ŷ�����
4�ڽ���PID����ʱ,λ��ʽPID��Ҫ�л������������,������ʽPIDֻ�������
λ��ʽPID��ȱ��:
�ŵ�:
��λ��ʽPID��һ�ַǵ���ʽ�㷨,��ֱ�ӿ���ִ�л���(��ƽ��С��),u(k)��ֵ��ִ�л�����ʵ��λ��(��С����ǰ�Ƕ�)��һһ��Ӧ��,�����ִ�л����������ֲ����Ķ����п��Ժܺ�Ӧ��ȱ��: ��ÿ����������ȥ��״̬�й�,����ʱҪ��e(k)�����ۼ�,���㹤������
����ʽPID��ȱ��:
�ŵ�: ������ʱӰ��С,��Ҫʱ�������жϵķ���ȥ���������ݡ�
���ֶ�/�Զ��л�ʱ���С,����ʵ�����Ŷ��л��������������ʱ,���ܱ���ԭֵ��
����ʽ�в���Ҫ�ۼӡ�����������u(k)��ȷ���������3�εIJ���ֵ�йء�ȱ��: �ٻ��ֽض�ЧӦ��,����̬���;
�������Ӱ����еı��ض���������ʽ��̫��; ��������������������������������
��Ȩ����:��������CSDN������ZС������ԭ������,��ѭCC 4.0 BY-SA��ȨЭ��,ת���븽��ԭ�ij������Ӽ���������
ԭ������:https://blog.csdn.net/as480133937/article/details/89508034
PID������������
һ�㲽��
a.ȷ����������P ����ȷ����������P
ʱ,����ȥ��PID�Ļ����������,һ������Ti->�����Td=0(�����PID�IJ����趨˵��),ʹPIDΪ���������ڡ������趨Ϊϵͳ���������ֵ��60%70%,��0�Ӵ��������P,ֱ��ϵͳ������;�ٷ�����,�Ӵ�ʱ�ı�������P��С,ֱ��ϵͳ����ʧ,��¼��ʱ�ı�������P,�趨PID�ı�������PΪ��ǰֵ��60%70%����������P������ɡ�
����b.ȷ������ʱ�䳣��Ti
������������Pȷ����,�趨һ���ϴ�Ļ���ʱ�䳣��Ti�ij�ֵ,Ȼ����СTi,ֱ��ϵͳ������,֮���ڷ�����,�Ӵ�Ti,ֱ��ϵͳ����ʧ����¼��ʱ��Ti,�趨PID�Ļ���ʱ�䳣��TiΪ��ǰֵ��150%~180%������ʱ�䳣��Ti������ɡ�
����c.ȷ����ʱ�䳣��Td ��������ʱ�䳣��Tdһ�㲻���趨,Ϊ0���ɡ���Ҫ�趨,��ȷ�� P��Ti�ķ�����ͬ,ȡ����ʱ��30%��
����d.ϵͳ���ء���������,�ٶ�PID����������,ֱ������Ҫ��