����qemu-riscv��0��ʼ����Ƕ��ʽlinuxϵͳch8. U-Boot
U-Boot����
�������ǵ���Ŀ������u-boot,���źܶ�ѧϰ��Ƕ��ʽ�����Ѷ���������Ϥu-boot�����Ŀ,��armǶ��ʽ������uboot������Ϊ����loader����һ��loader,��������linux�ںˡ�uboot��������ΪBootLoader������,��Ҫ���ܾ���loader+boot,����u-boot������ڽ����Ǵӷ���ʧ�Լ����ں������ں�,��ӵ���˸����,����ͨ�����繦��,���������̼��ȵ�,������ǵ���Ŀ��Ҳ��uboot��ֲ������Ϊ���̵�һ����,�Ա㹦�ܵ�������,�������������������Ʒ,Ҳ����ѡ��ֱ��opensbi����kernel����uboot�Ρ�
����,uboot��һ��spl���ܵ�֧��,�ǽ�uboot��Ϊ������bl0��bl1,bl0ͨ��������xipģʽ��flash��,������ֻ��Ҫ�������ڴ�,���г�ʼ��ddr�ռ����������bl1���ֵ�ddr�ڽ��к���uboot�����������ǾͲ���Ҫspl����,������ǰ��opensbi������BL0�εĹ��ܡ�
U-Boot����
�ϻ�����˵��,ֱ�ӽ�������,����ȥ����ubootԴ��,������Ҫ�������µ�uboot-2021.07,ΪʲôҪ��ô�µİ汾��,��ʵ���ﻹ�и�С����,�ڿ�ʼ�����ϵ�в���ǰ,���Ѿ�����һ���ֹ�����,��ʱ��Ҫʹ��qemu��fw_cfg���ݲ�����Ŀ���,��ʱ��ʹ����qemu5.2��uboot-2021.04�İ汾,qemu��riscv��virt��û�м���fw_cfg֧��,��uboot������fw_cfg��mmio������û��,ֻ��x86������,����һ���Щʱ��ʵ����mmio������,��ʱ�����ύpatch��uboot����,���������uboot-2021.07-rc5�汾�п����߸ո��ύmmio������,��֪���Ͳ����Լ�д��,�պø����������ϵ�в��Ϳ�ʼ֮ʱ,uboot-2021.07��ʽ�淢����,���Ǿ�ֱ��ʹ������汾��,���õ�������ȱʧ�������ˡ�u-boot�ٷ����ص�ַ����������
���������Ȳ����κ���,ֱ��ʹ��riscv64_smode_defconfig�����ý��б���,���ɵ�u-boot�Լ�map�ļ����ǿ��������Ŀ¼�������ʹ��,����Ϊ��uboot�ĵ��Կ���ʹ��objdump��������ļ������u-boot.lst���Թ��鿴��
# ����uboot
if [ ! -d "$SHELL_FOLDER/output/uboot" ]; then
mkdir $SHELL_FOLDER/output/uboot
fi
cd $SHELL_FOLDER/u-boot-2021.07
make CROSS_COMPILE=/opt/riscv64--glibc--bleeding-edge-2020.08-1/bin/riscv64-linux- qemu-riscv64_smode_defconfig
make CROSS_COMPILE=/opt/riscv64--glibc--bleeding-edge-2020.08-1/bin/riscv64-linux- -j16
cp $SHELL_FOLDER/u-boot-2021.07/u-boot $SHELL_FOLDER/output/uboot/u-boot.elf
cp $SHELL_FOLDER/u-boot-2021.07/u-boot.map $SHELL_FOLDER/output/uboot/u-boot.map
cp $SHELL_FOLDER/u-boot-2021.07/u-boot.bin $SHELL_FOLDER/output/uboot/u-boot.bin
$CROSS_PREFIX-objdump --source --demangle --disassemble --reloc --wide $SHELL_FOLDER/output/uboot/u-boot.elf > $SHELL_FOLDER/output/uboot/u-boot.lst
ubootͬ����Ҫ�豸���ļ�,���ǽ����±�дһ���豸���ļ�����uboot��linux kernel��opensbiʹ�õ��豸����ͬ����Ҫ��ɾ����opensbi��domian�������,����:
/dts-v1/;
/ {
#address-cells = <0x2>;
#size-cells = <0x2>;
compatible = "riscv-quard-star";
model = "riscv-quard-star,qemu";
chosen {
bootargs = "console=ttyS0";
stdout-path = "/soc/uart0@10000000";
};
memory@80000000 {
device_type = "memory";
reg = <0x0 0x80000000 0x0 0x30000000>;
};
cpus {
#address-cells = <0x1>;
#size-cells = <0x0>;
timebase-frequency = <0x989680>;
cpu0: cpu@0 {
phandle = <0xf>;
device_type = "cpu";
reg = <0x0>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0x10>;
};
};
cpu1: cpu@1 {
phandle = <0xd>;
device_type = "cpu";
reg = <0x1>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0xe>;
};
};
cpu2: cpu@2 {
phandle = <0xb>;
device_type = "cpu";
reg = <0x2>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0xc>;
};
};
cpu3: cpu@3 {
phandle = <0x9>;
device_type = "cpu";
reg = <0x3>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0xa>;
};
};
cpu4: cpu@4 {
phandle = <0x7>;
device_type = "cpu";
reg = <0x4>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0x8>;
};
};
cpu5: cpu@5 {
phandle = <0x5>;
device_type = "cpu";
reg = <0x5>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0x6>;
};
};
cpu6: cpu@6 {
phandle = <0x3>;
device_type = "cpu";
reg = <0x6>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0x4>;
};
};
cpu7: cpu@7 {
phandle = <0x1>;
device_type = "cpu";
reg = <0x7>;
status = "okay";
compatible = "riscv";
riscv,isa = "rv64imafdcsu";
mmu-type = "riscv,sv48";
interrupt-controller {
#interrupt-cells = <0x1>;
interrupt-controller;
compatible = "riscv,cpu-intc";
phandle = <0x2>;
};
};
cpu-map {
cluster0 {
core0 {
cpu = <0xf>;
};
core1 {
cpu = <0xd>;
};
core2 {
cpu = <0xb>;
};
core3 {
cpu = <0x9>;
};
core4 {
cpu = <0x7>;
};
core5 {
cpu = <0x5>;
};
core6 {
cpu = <0x3>;
};
core7 {
cpu = <0x1>;
};
};
};
};
soc {
#address-cells = <0x2>;
#size-cells = <0x2>;
compatible = "simple-bus";
ranges;
uart0: uart0@10000000 {
interrupts = <0xa>;
interrupt-parent = <0x11>;
clock-frequency = <0x384000>;
reg = <0x0 0x10000000 0x0 0x100>;
compatible = "ns16550a";
};
uart1: uart1@10001000 {
interrupts = <0xa>;
interrupt-parent = <0x11>;
clock-frequency = <0x384000>;
reg = <0x0 0x10001000 0x0 0x100>;
compatible = "ns16550a";
};
plic@c000000 {
phandle = <0x11>;
riscv,ndev = <0x35>;
reg = <0x0 0xc000000 0x0 0x210000>;
interrupts-extended = <0x10 0xb 0x10 0x9 0xe 0xb 0xe 0x9 0xc 0xb 0xc 0x9 0xa 0xb 0xa 0x9 0x8 0xb 0x8 0x9 0x6 0xb 0x6 0x9 0x4 0xb 0x4 0x9 0x2 0xb 0x2 0x9>;
interrupt-controller;
compatible = "riscv,plic0";
#interrupt-cells = <0x1>;
#address-cells = <0x0>;
};
clint@2000000 {
interrupts-extended = <0x10 0x3 0x10 0x7 0xe 0x3 0xe 0x7 0xc 0x3 0xc 0x7 0xa 0x3 0xa 0x7 0x8 0x3 0x8 0x7 0x6 0x3 0x6 0x7 0x4 0x3 0x4 0x7 0x2 0x3 0x2 0x7>;
reg = <0x0 0x2000000 0x0 0x10000>;
compatible = "riscv,clint0";
};
};
};
������opensbi��dts�ļ���domain��������ַ:
udomain: untrusted-domain {
compatible = "opensbi,domain,instance";
possible-harts = <&cpu0 &cpu1 &cpu2 &cpu3 &cpu4 &cpu5 &cpu6>;
regions = <&tmem 0x0>, <&tuart 0x0>, <&allmem 0x7>;
boot-hart = <&cpu0>;
next-arg1 = <0x0 0x82000000>; /* ��������ַ֮���Ը�Ϊ���ԭ������ΪĬ�ϵ�riscv64_smode_defconfig����ubootʹ������������ַ,������ʹ��Ĭ������������uboot,���������¹滮�ڴ���� */
next-addr = <0x0 0x80200000>;
next-mode = <0x1>;
system-reset-allowed;
};
dts�����Լ��̼����:
# ����uboot.dtb
cd $SHELL_FOLDER/dts
dtc -I dts -O dtb -o $SHELL_FOLDER/output/uboot/quard_star_uboot.dtb quard_star_uboot.dts
# �ϳ�firmware�̼�
if [ ! -d "$SHELL_FOLDER/output/fw" ]; then
mkdir $SHELL_FOLDER/output/fw
fi
cd $SHELL_FOLDER/output/fw
rm -rf fw.bin
dd of=fw.bin bs=1k count=32k if=/dev/zero
dd of=fw.bin bs=1k conv=notrunc seek=0 if=$SHELL_FOLDER/output/lowlevelboot/lowlevel_fw.bin
dd of=fw.bin bs=1k conv=notrunc seek=512 if=$SHELL_FOLDER/output/opensbi/quard_star_sbi.dtb
dd of=fw.bin bs=1k conv=notrunc seek=1K if=$SHELL_FOLDER/output/uboot/quard_star_uboot.dtb
dd of=fw.bin bs=1k conv=notrunc seek=2K if=$SHELL_FOLDER/output/opensbi/fw_jump.bin
dd of=fw.bin bs=1k conv=notrunc seek=4K if=$SHELL_FOLDER/output/trusted_domain/trusted_fw.bin
dd of=fw.bin bs=1k conv=notrunc seek=8K if=$SHELL_FOLDER/output/uboot/u-boot.bin
��lowlevelboot���������������ݼ���uboot�Ͷ�Ӧ��dtb�ļ�(ע���ַ����)��
//load qemu_uboot.dtb
//[0x20100000:0x20180000] --> [0x82000000:0x82080000]
li a0, 0x201
slli a0, a0, 20 //a0 = 0x20100000
li a1, 0x820
slli a1, a1, 20 //a1 = 0x82000000
li a2, 0x8208
slli a2, a2, 16 //a2 = 0x82080000
load_data a0,a1,a2
//load u-boot.bin
//[0x20800000:0x20C00000] --> [0x80200000:0x80600000]
li a0, 0x208
slli a0, a0, 20 //a0 = 0x20800000
li a1, 0x802
slli a1, a1, 20 //a1 = 0x80200000
li a2, 0x806
slli a2, a2, 20 //a2 = 0x80600000
load_data a0,a1,a2
ok,������������,ִ�б���ű�,�������С�
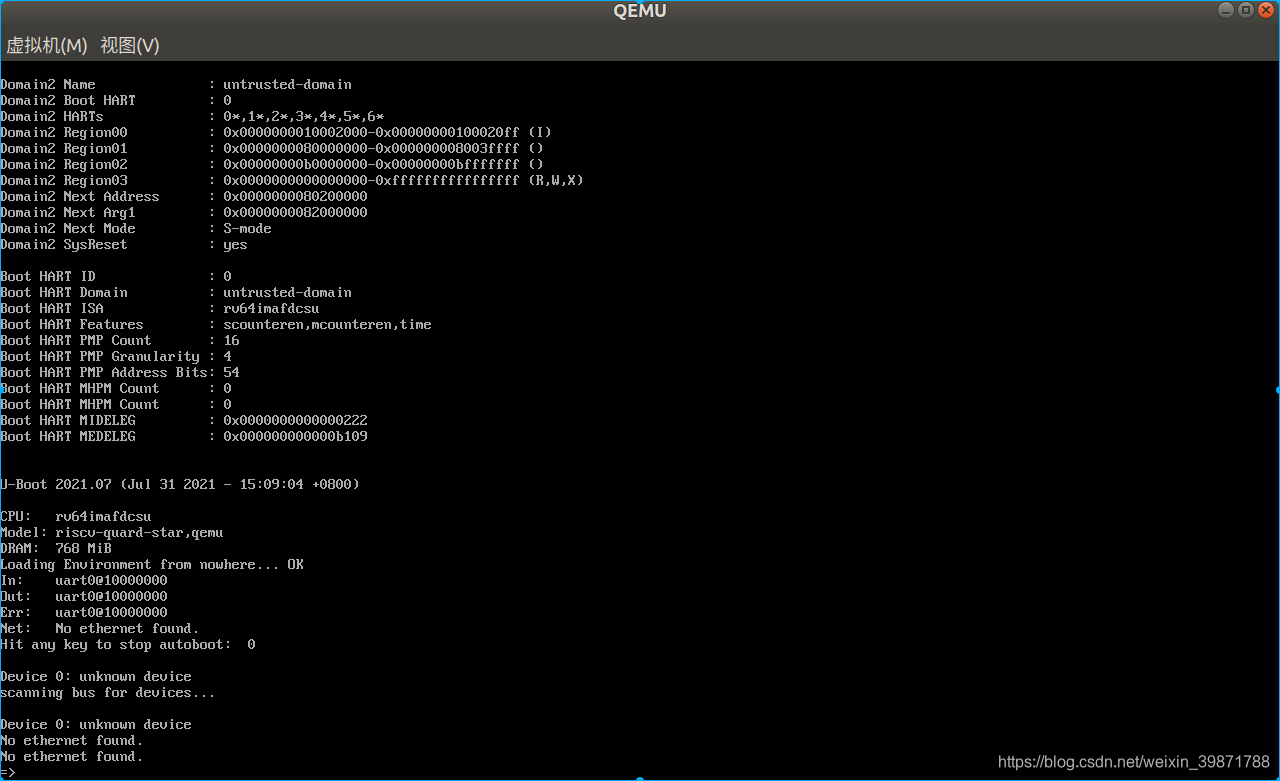
��������help���Բ鿴uboot���ɵ�����,����Ϥuboot�����ѿ��Գ��Ը�������,��uboot������Ϥ��
U-Boot�������̳�����
riscvĿǰuboot����������λ��u-boot-2021.07/arch/riscv/cpu/start.S��,���ӽű�λ��u-boot-2021.07/arch/riscv/cpu/u-boot.lds,���Բ鿴Դ�뷢�ֳ����_start��ʼִ��,���smpϵͳboot����ִ�����ڵij�ʼ������,��������Ϊboard_init_f�C>>harts_early_init�C>>gd_init�C>>relocate_code�C>>board_init_r��board_init_r��ʼ��ȫ�����C������,��֮ǰboad_init_f��,������u-boot-2021.07/common/board_f.c��init_sequence_f������,��Ҫ�����ڴ�ʱ�ӵȳ�ʼ���Լ�һЩ���ڳ�ʼ������,��Ȼ��ʹ��C����,��һ��Ҫע���ʱ������ʼ���˲���ȫ�ֱ���(��Ҫ��gd)��board_init_rλ��u-boot-2021.07/common/board_r.c,init_sequence_r����ָ����ڰ������ν��г�ʼ��������,����һЩ�����ij�ʼ��(dm���������ṹ),�б����һ�����run_main_loop�C>>main_loop,main_loopλ��u-boot-2021.07/common/main.c,������Ҫ����cli_init,autoboot_command,cli_loop,Ҳ���dz�ʼ��uboot�е��������ն�,������ִ���Զ�bootָ��,�����Զ�boot��Uboot��Distro Boot���Ǻ����½�Ҫչ�������������,���ڽ�����uboot����������һ����������,�����ҵļ�����,��Ӧ���Ѿ��������uboot�������̵ij�����֪,�ܽἴʱuboot��Ϊ���γ�ʼ��,��һ��board_init_f,�����ڳ�ʼ��,�漰�ڴ�Ȼ�����ʼ��,Ȼ��չ��data��,bss��,��ջ�Ⱥ����board_init_r,���������ʼ��,֮�����������cli��ִ���ⲿ������Զ������ں����̡�
�����ﱾƪ���ݽ�����ɡ��������ݳɹ���������u-boot������udomian��,����u-boot���˳�����ʶ,���Ǻܶ�����ϸ���Լ��ڴ��ַ��ѡ��������û���������,��һ�����ǽ��������չ��������
���̵̳�
github�ֿ�:https://github.com/QQxiaoming/quard_star_tutorial
gitee�ֿ�:https://gitee.com/QQxiaoming/quard_star_tutorial
��������tag:ch8