SRAM
����չʾ��STM32 SRAM �ڴ���չ����
�����漰 :
SRAM �ڴ���չ����
FatFs �ļ�ϵͳ��ֲ
SPI������ֲ����
SPI�ֽ�����ģ�������д �����д
USART���ڵ�ʶ��
IO���������
�������ⲿ�жϴ���
32λ����ͨѶ,�ַ���ͨѶ,���ַ�ͨѶ
�������� : GitԴ������

����Ŀ¼
- ǰ��
- һ�� ���Ҫ��
- ����ʹ�ò���
- --����ԭ��ͼ
- (ע��)Keil ����״̬
- ���������� main.c
- ���� SRAM �ڴ�����ļ�SRAM_book.h
- ���� SRAM �ڴ�����ļ�SRAM_book.c
- ���� ϵͳ�ļ�diskio.c
- ��ͷ�ļ��ļ�diskio.h
- ����FatFs����� ͷ�ļ� FatFs_book.h
- ����FatFs����� ͷ�ļ� FatFs_book.c
- ����SPI����� ͷ�ļ� SPI_book.h
- ����SPI����� ͷ�ļ� SPI_book.c
- ����I2Cģ���� ͷ�ļ� I2C_soft_book.h
- ����I2Cģ���� ͷ�ļ� I2C_soft_book.c
- ����I2CӲ������� ͷ�ļ� I2C_book.h
- ����I2CӲ������� ͷ�ļ� I2C_book.c
- ����USART����� ͷ�ļ� USART_book.h
- ����USART�����C�ļ� USART_book.c
- ����DMA����� ͷ�ļ� DMA_book.h
- ����DMA�����C�ļ� DMA_book.c
- ����EXIT�� ͷ�ļ� Exit_book.h
- ����EXIT��C�ļ� Exit_book.c
- ����Key����� ͷ�ļ� Key_book.h
- ����Key��C�ļ� Key_book.c
- ����LED ��ͷ�ļ� Led_book.h
- ����LED �� �ļ� Led_book.c
- ���� Systick����� ͷ�ļ� Systick_book.h
- ���� Systick��C�ļ� Systick_book.c
- ���� ͷ�ļ����� ͷ�ļ� PROJ_book.h
ǰ��
STM32F1 ϵ��оƬʹ�� FSMC ������������չ�Ĵ洢��,FSMC ��Flexible StaticMemory Controller ����д,��Ϊ���ľ�̬�洢�������������������������� SRAM��NOR FLASH �Լ� NAND FLSAH ���͵Ĵ洢��,���������� SDRAM ���ֶ�̬�Ĵ洢������ STM32F429 ϵ�еĿ�������,������ FMC ����,֧�ֿ��� SDRAM �洢����


ͼ�������� Cortex-M3 �ں˵Ĵ洢�ռ����,�Ҳ��� STM32 FSMC ����ĵ�ַӳ�䡣���Կ��� FSMC �� NOR/PSRAM/SRAM/NAND FLASH �Լ� PC ���ĵ�ַ���� External RAM ��ַ�ռ��ڡ�������Ϊ���������ĵ�ַӳ��,ʹ�÷��� FSMC ���ƵĴ洢��ʱ,������ STM32 ��Ƭ������Ĵ���һ��(Ƭ������ĵ�ַӳ�伴ͼ�����ġ�Peripheral������)��
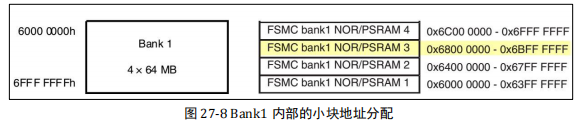
FSMC ������ External RAM �洢����ֳ��� 4 �� Bank ����,�������˵�ַ��Χ�����õĴ洢������,�� NOR �� SRAM �洢��ֻ��ʹ�� Bank1 �ĵ�ַ�� ��ÿ�� Bank ���ڲ��ֳַ��� 4 ��С��,ÿ��С������Ӧ�Ŀ���������������Ƭѡ�ź�,�� FSMC_NE[4:1]�ź��߿�����ѡ�� BANK1 �ڲ��� 4 С���ַ����,��ͼ 27-8,�� STM32 ���� 0x68000000-0x6BFFFFFF ��ַ�ռ�ʱ,����ʵ� Bank1 �ĵ� 3 С������,��Ӧ�� FSMC_NE3 �ź�����������ź�


�Զ�ʱ��Ϊ��,��ͼ��ʾһ���洢�����������ɵ�ַ��������(ADDSET)�����ݽ�������(DATAST)�Լ� 2 �� HCLK ������ɡ��ڵ�ַ����������,��ַ�߷���Ҫ���ʵĵ�ַ,���������ź���ָʾ��Ҫ��ȡ��ַ�ĸߡ����ֽڲ���,Ƭѡ�ź�ʹ�ܴ洢��оƬ;��ַ�������ڽ������ʹ���ź��߷�����ʹ���ź�,���Ŵ洢��ͨ�������ź��߰�Ŀ�����ݴ���� FSMC,FSMC ���������ںˡ�
дʱ������,����������һ���洢���������ڽ��ɵ�ַ��������(ADDSET)�����ݽ�������(DATAST)���,�������ݽ��������ڼ�дʹ���ź��߷���д�ź�,���� FSMC ������ͨ�������ߴ��䵽�洢���С���,��Ҫʹ����������洢������Ŀ������
һ�� ���Ҫ��
(1) ��ʼ��ͨѶʹ�õ�Ŀ�����ż��˿�ʱ��(2) ʹ�� FSMC �����ʱ��;
(3) ���� FSMC SRAM ��ʱ����ģʽ
(4) �������Ʒ����ⲿ SRAM �洢��
(5) ��д���Գ���,�Զ�д���ݽ���У��
����ʹ�ò���
�C����ԭ��ͼ

(ע��)Keil ����״̬
�ҵIJ�����������Ŀ���� ���;
�������
(https://blog.csdn.net/u012651389/article/details/119189949)
���������� main.c
�������� :
/**
******************************************************************************
* @file GPIO/JTAG_Remap/main.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main program body
******************************************************************************
* @attention
*
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "PROJ_book.h"
/* Private functions ---------------------------------------------------------*/
/**
* @brief Main program.
* @param None
* @retval None
*/
void fn_LED_Flash_Init(void);
void fn_usart_show_Init(void);
void fn_DMA_show_Init(void);
void fn_I2C_EE_Init(void);
void fn_I2C_EE_Soft_Init(void);
void fn_SPI_FLASH_Soft_Init(void);
void fn_FatFs_Document_Init(void);
void fn_SRAM_Init(void);
#define countof(a) (sizeof(a) / sizeof(*(a)))
#define _I2C_BufferSize (countof(writeData)-1)
static uint8_t writeData[_I2C_PageSize]={4,5,6,7,8,9,10,11};
static uint8_t writeData2[_I2C_PageSize]={24,25,26,27,28,29,30,31};
static uint8_t ReadData[_I2C_BufferSize]={0};
#define _SPI_BufferSize SPI_PAGE_SIZE //(countof(write_SPI_Data)-1)
static uint8_t write_SPI_Data[_SPI_BufferSize]={0};
static uint8_t Read_SPI_Data[_SPI_BufferSize]={0};
int main(void)
{
fn_RCC_Init(); //CPU ��Ƶ
fn_Led_Init(); //LED �����ʼ��
fn_Key_Init(); //���� �����ʼ��
fn_USART_Init(); //���������ʼ��
printf("\n\n\r\n********** ICϵͳ��ʼ���� **********\r\n");
fn_LED_Flash_Init(); //RGB �������
fn_usart_show_Init(); //�����������
fn_EXTI_GPIO_Config(); //�ⲿ�ж����
fn_DMA_show_Init(); //��ʼ��DMA������·
fn_I2C_EE_Init(); //��ʼ��Ӳ��I2C������·
fn_I2C_EE_Soft_Init(); //��ʼ������I2C������·
fn_SPI_FLASH_Soft_Init(); //SPI����ͨѶ
fn_FatFs_Document_Init(); //FatFs�ļ���ȡ����
fn_SRAM_Init(); //SRAM�ļ���ȡ����
while(1){
fn_LED_ALL_OFF();
fn_Systick_Delay(500,_Systick_ms);
__G_OUT__;
fn_Systick_Delay(500,_Systick_ms);
}
}
//======================================================================
//======================================================================
void fn_LED_Flash_Init(void){
uint16_t count_Init = 2;
printf("\n ---> LED��ʼ���� \n");
while(count_Init-->0){
fn_LED_ALL_OFF();
__R_OUT__;
fn_Systick_Delay(500,_Systick_ms);
fn_LED_ALL_OFF();
__G_OUT__;
fn_Systick_Delay(500,_Systick_ms);
fn_LED_ALL_OFF();
__B_OUT__;
fn_Systick_Delay(500,_Systick_ms);
fn_LED_ALL_OFF();
__R_OUT__;
}
}
//======================================================================
//======================================================================
void fn_usart_show_Init(void){
fn_Usart_Send_Byte(_DEBUG_USARTx,'\r');
printf("-->����ͨ��ָ������� \n");
fn_Usart_SendString(_DEBUG_USARTx," : wangqi \n");
}
//======================================================================
//======================================================================
void fn_DMA_show_Init(void){
printf("\n ---> DMA��ʼ���� \n");
_DMA_ROM_TO_RAM(Map_BUFFER_SIZE ,aSRC_Cont_Buffer , aDST_Buffer);
_DMA_RAM_TO_USART(Map_BUFFER_SIZE ,USART_Source_ADDR , aDST_Buffer);
printf("---> DMA������� \n");
}
//======================================================================
//======================================================================
void fn_I2C_EE_Init(void){
printf("\n-->I2C_����д�뿪ʼ \n");
_I2C_EE_Init();
I2C_Write_fun(writeData ,EEP_Firstpage ,_I2C_BufferSize);
I2C_Read_fun(ReadData ,EEP_Firstpage ,_I2C_BufferSize);
printf("--->I2C_��������\n\r");
}
//======================================================================
//======================================================================
void fn_I2C_EE_Soft_Init(void){
printf("\n-->I2C_��������д�뿪ʼ \n");
I2C_Soft_Init();
I2C_Soft_Write_fun(writeData2 ,EEP_Firstpage ,_I2C_BufferSize);
I2C_Soft_Read_fun(ReadData ,EEP_Firstpage ,_I2C_BufferSize);
printf("\n--->I2C_������������\n\r");
}
//======================================================================
//======================================================================
void fn_SPI_FLASH_Soft_Init(void){
uint16_t i,FlashID;
printf("-->SPIͨ��ָ���Կ�ʼ \n");
SPI_FLASH_Init();
FlashID = SPI_Read_ID() ;
if(FlashID == _SPI_FLASH_ID){
printf("-->SPI 0x%x \n",FlashID);
}
SPI_Erase_Sector(0); //���һ��ҳ�Ŀռ�
printf("\n\n-->SPI��տ�ʼ \n");
SPI_Read_Data(Read_SPI_Data , 0, SPI_PAGE_SIZE);
SPI_Show_Data(Read_SPI_Data , SPI_PAGE_SIZE);
printf("\n\n-->SPI������ \n");
for(i=0 ; i < _SPI_BufferSize ; i++){
write_SPI_Data[i] = 0xA7;
}
SPI_Show_Data(write_SPI_Data , SPI_PAGE_SIZE);
SPI_BufferWrite_Data(write_SPI_Data ,0x000000,_SPI_BufferSize);
printf("\n\n-->SPI������� \n");
SPI_Read_Data(Read_SPI_Data , 0x000000, _SPI_BufferSize);
SPI_Show_Data(Read_SPI_Data , _SPI_BufferSize);
printf("-->SPIͨ��ָ������� \n");
}
//======================================================================
//======================================================================
void fn_FatFs_Document_Init(void){
/*----------------------- ��ʽ������ -----------------*/
FatFs_equipment_flash("1:");
/*----------------------- �ļ�ϵͳ��д���� -------------------*/
FatFs_document_Text(FileTest_ADDR_Buffer_Document, "Wangqi����!\n" );
/*----------------------- �ļ���������ʶ�� -------------------*/
file_check(FileTest_ADDR_Buffer_Document);
/*----------------------- �ļ�Ŀ¼���IJ��� -------------------*/
FatFs_document_set_content(FileTest_ADDR_Buffer_Document , FileTest_ADDR_Buffer_path , FileTest_ADDR_Buffer_NewDocument2);
/*----------------------- �ļ���������ʶ�� -------------------*/
file_check(FileTest_ADDR_Buffer_NewDocument2);
/*----------------------- �ļ�Ŀ¼����ʶ�� -------------------*/
Scan_file_Check("1:");
/*----------------------- ��ɲ��� -------------------*/
FatFs_Close_flash("1:");
}
//======================================================================
//======================================================================
void fn_SRAM_Init(void){ //SRAM�ļ���ȡ����
printf("********** SRAM_��չ�ڴ���� ********** \n");
printf("-->�ⲿSRAM_�ڴ溯����ʼ����ʼ \n");
SRAM_Init();
printf("\n-->�ⲿSRAM_�ڴ溯�����Կ�ʼ \n");
SRAM_Test();
printf("\n-->�ⲿSRAM_�ڴ溯��д�뿪ʼ \n");
SRAM_Write();
}
//======================================================================
//======================================================================
void delay(int x){
int y = 0xFFFFF;
while((x--)>0){
while((y--)>0){
__NOP();
__NOP();
__NOP();
__NOP();
__NOP();
}
}
}
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
���� SRAM �ڴ�����ļ�SRAM_book.h
�������� :
#ifndef __SRAM_BOOK_H_
#define __SRAM_BOOK_H_
#include "stm32f10x.h"
//���������ַ ��Ϊ���ǵ�оƬ��1M�ֽڵ�
#define SRAM_BASE_ADDR (0x68000000)
#define SRAM_CHIP (1) //1M
#define SRAM_SIZE (SRAM_CHIP*1024*1024)
#define SRAM_END_ADDR (SRAM_BASE_ADDR + SRAM_SIZE)
/*A��ַ�ź���*/
#define FSMC_A0_GPIO_PORT GPIOF
#define FSMC_A0_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A0_GPIO_PIN GPIO_Pin_0
#define FSMC_A1_GPIO_PORT GPIOF
#define FSMC_A1_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A1_GPIO_PIN GPIO_Pin_1
#define FSMC_A2_GPIO_PORT GPIOF
#define FSMC_A2_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A2_GPIO_PIN GPIO_Pin_2
#define FSMC_A3_GPIO_PORT GPIOF
#define FSMC_A3_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A3_GPIO_PIN GPIO_Pin_3
#define FSMC_A4_GPIO_PORT GPIOF
#define FSMC_A4_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A4_GPIO_PIN GPIO_Pin_4
#define FSMC_A5_GPIO_PORT GPIOF
#define FSMC_A5_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A5_GPIO_PIN GPIO_Pin_5
#define FSMC_A6_GPIO_PORT GPIOF
#define FSMC_A6_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A6_GPIO_PIN GPIO_Pin_12
#define FSMC_A7_GPIO_PORT GPIOF
#define FSMC_A7_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A7_GPIO_PIN GPIO_Pin_13
#define FSMC_A8_GPIO_PORT GPIOF
#define FSMC_A8_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A8_GPIO_PIN GPIO_Pin_14
#define FSMC_A9_GPIO_PORT GPIOF
#define FSMC_A9_GPIO_CLK RCC_APB2Periph_GPIOF
#define FSMC_A9_GPIO_PIN GPIO_Pin_15
#define FSMC_A10_GPIO_PORT GPIOG
#define FSMC_A10_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A10_GPIO_PIN GPIO_Pin_0
#define FSMC_A11_GPIO_PORT GPIOG
#define FSMC_A11_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A11_GPIO_PIN GPIO_Pin_1
#define FSMC_A12_GPIO_PORT GPIOG
#define FSMC_A12_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A12_GPIO_PIN GPIO_Pin_2
#define FSMC_A13_GPIO_PORT GPIOG
#define FSMC_A13_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A13_GPIO_PIN GPIO_Pin_3
#define FSMC_A14_GPIO_PORT GPIOG
#define FSMC_A14_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A14_GPIO_PIN GPIO_Pin_4
#define FSMC_A15_GPIO_PORT GPIOG
#define FSMC_A15_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_A15_GPIO_PIN GPIO_Pin_5
#define FSMC_A16_GPIO_PORT GPIOD
#define FSMC_A16_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_A16_GPIO_PIN GPIO_Pin_11
#define FSMC_A17_GPIO_PORT GPIOD
#define FSMC_A17_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_A17_GPIO_PIN GPIO_Pin_12
#define FSMC_A18_GPIO_PORT GPIOD
#define FSMC_A18_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_A18_GPIO_PIN GPIO_Pin_13
/*D �����ź���*/
#define FSMC_D0_GPIO_PORT GPIOD
#define FSMC_D0_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D0_GPIO_PIN GPIO_Pin_14
#define FSMC_D1_GPIO_PORT GPIOD
#define FSMC_D1_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D1_GPIO_PIN GPIO_Pin_15
#define FSMC_D2_GPIO_PORT GPIOD
#define FSMC_D2_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D2_GPIO_PIN GPIO_Pin_0
#define FSMC_D3_GPIO_PORT GPIOD
#define FSMC_D3_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D3_GPIO_PIN GPIO_Pin_1
#define FSMC_D4_GPIO_PORT GPIOE
#define FSMC_D4_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D4_GPIO_PIN GPIO_Pin_7
#define FSMC_D5_GPIO_PORT GPIOE
#define FSMC_D5_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D5_GPIO_PIN GPIO_Pin_8
#define FSMC_D6_GPIO_PORT GPIOE
#define FSMC_D6_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D6_GPIO_PIN GPIO_Pin_9
#define FSMC_D7_GPIO_PORT GPIOE
#define FSMC_D7_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D7_GPIO_PIN GPIO_Pin_10
#define FSMC_D8_GPIO_PORT GPIOE
#define FSMC_D8_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D8_GPIO_PIN GPIO_Pin_11
#define FSMC_D9_GPIO_PORT GPIOE
#define FSMC_D9_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D9_GPIO_PIN GPIO_Pin_12
#define FSMC_D10_GPIO_PORT GPIOE
#define FSMC_D10_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D10_GPIO_PIN GPIO_Pin_13
#define FSMC_D11_GPIO_PORT GPIOE
#define FSMC_D11_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D11_GPIO_PIN GPIO_Pin_14
#define FSMC_D12_GPIO_PORT GPIOE
#define FSMC_D12_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_D12_GPIO_PIN GPIO_Pin_15
#define FSMC_D13_GPIO_PORT GPIOD
#define FSMC_D13_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D13_GPIO_PIN GPIO_Pin_8
#define FSMC_D14_GPIO_PORT GPIOD
#define FSMC_D14_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D14_GPIO_PIN GPIO_Pin_9
#define FSMC_D15_GPIO_PORT GPIOD
#define FSMC_D15_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_D15_GPIO_PIN GPIO_Pin_10
/*�����ź���*/
/*CSƬѡ*/
/*NE3 ,��Ӧ�Ļ���ַ0x68000000*/
// ����һ��Ҫע�� �Ǹ���ַ���ĸ���ַ
#define FSMC_CS_GPIO_PORT GPIOG
#define FSMC_CS_GPIO_CLK RCC_APB2Periph_GPIOG
#define FSMC_CS_GPIO_PIN GPIO_Pin_10
/*WEдʹ��*/
#define FSMC_WE_GPIO_PORT GPIOD
#define FSMC_WE_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_WE_GPIO_PIN GPIO_Pin_5
/*OE��ʹ��*/
#define FSMC_OE_GPIO_PORT GPIOD
#define FSMC_OE_GPIO_CLK RCC_APB2Periph_GPIOD
#define FSMC_OE_GPIO_PIN GPIO_Pin_4
/*UB��������*/
#define FSMC_UDQM_GPIO_PORT GPIOE
#define FSMC_UDQM_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_UDQM_GPIO_PIN GPIO_Pin_1
/*LB��������*/
#define FSMC_LDQM_GPIO_PORT GPIOE
#define FSMC_LDQM_GPIO_CLK RCC_APB2Periph_GPIOE
#define FSMC_LDQM_GPIO_PIN GPIO_Pin_0
void SRAM_Init(void);
uint8_t SRAM_Test(void);
void SRAM_Write(void);
#endif
���� SRAM �ڴ�����ļ�SRAM_book.c
�������� :
#include "SRAM_book.h"
#include "Systick_book.h"
#include "USART_book.h"
/**
* @brief ��ʼ������SRAM��IO
* @param ��
* @retval ��
*/
static void SRAM_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* ʹ��SRAM��ص�GPIOʱ�� */
/*��ַ�ź���*/
RCC_APB2PeriphClockCmd(FSMC_A0_GPIO_CLK | FSMC_A1_GPIO_CLK | FSMC_A2_GPIO_CLK |
FSMC_A3_GPIO_CLK | FSMC_A4_GPIO_CLK | FSMC_A5_GPIO_CLK |
FSMC_A6_GPIO_CLK | FSMC_A7_GPIO_CLK | FSMC_A8_GPIO_CLK |
FSMC_A9_GPIO_CLK | FSMC_A10_GPIO_CLK| FSMC_A11_GPIO_CLK|
FSMC_A12_GPIO_CLK| FSMC_A13_GPIO_CLK|FSMC_A14_GPIO_CLK|
FSMC_A15_GPIO_CLK|FSMC_A16_GPIO_CLK|FSMC_A17_GPIO_CLK|FSMC_A18_GPIO_CLK|
/*�����ź���*/
FSMC_D0_GPIO_CLK | FSMC_D1_GPIO_CLK | FSMC_D2_GPIO_CLK |
FSMC_D3_GPIO_CLK | FSMC_D4_GPIO_CLK | FSMC_D5_GPIO_CLK |
FSMC_D6_GPIO_CLK | FSMC_D7_GPIO_CLK | FSMC_D8_GPIO_CLK |
FSMC_D9_GPIO_CLK | FSMC_D10_GPIO_CLK| FSMC_D11_GPIO_CLK|
FSMC_D12_GPIO_CLK| FSMC_D13_GPIO_CLK| FSMC_D14_GPIO_CLK|
FSMC_D15_GPIO_CLK|
/*�����ź���*/
FSMC_CS_GPIO_CLK | FSMC_WE_GPIO_CLK | FSMC_OE_GPIO_CLK |
FSMC_UDQM_GPIO_CLK|FSMC_LDQM_GPIO_CLK, ENABLE);
//UDQM UB����
/*-- GPIO ���� -----------------------------------------------------*/
/* ͨ�� GPIO ���� */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //����Ϊ���ù���
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //���Ǹ������깦����Ϊ����������ֲ�Ĺ涨
/*A��ַ�ź��� �����������*/
GPIO_InitStructure.GPIO_Pin = FSMC_A0_GPIO_PIN;
GPIO_Init(FSMC_A0_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A1_GPIO_PIN;
GPIO_Init(FSMC_A1_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A2_GPIO_PIN;
GPIO_Init(FSMC_A2_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A3_GPIO_PIN;
GPIO_Init(FSMC_A3_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A4_GPIO_PIN;
GPIO_Init(FSMC_A4_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A5_GPIO_PIN;
GPIO_Init(FSMC_A5_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A6_GPIO_PIN;
GPIO_Init(FSMC_A6_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A7_GPIO_PIN;
GPIO_Init(FSMC_A7_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A8_GPIO_PIN;
GPIO_Init(FSMC_A8_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A9_GPIO_PIN;
GPIO_Init(FSMC_A9_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A10_GPIO_PIN;
GPIO_Init(FSMC_A10_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A11_GPIO_PIN;
GPIO_Init(FSMC_A11_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A12_GPIO_PIN;
GPIO_Init(FSMC_A12_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A13_GPIO_PIN;
GPIO_Init(FSMC_A13_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A14_GPIO_PIN;
GPIO_Init(FSMC_A14_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A15_GPIO_PIN;
GPIO_Init(FSMC_A15_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A16_GPIO_PIN;
GPIO_Init(FSMC_A16_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A17_GPIO_PIN;
GPIO_Init(FSMC_A17_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_A18_GPIO_PIN;
GPIO_Init(FSMC_A18_GPIO_PORT, &GPIO_InitStructure);
/*DQ�����ź��� �����������*/
GPIO_InitStructure.GPIO_Pin = FSMC_D0_GPIO_PIN;
GPIO_Init(FSMC_D0_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D1_GPIO_PIN;
GPIO_Init(FSMC_D1_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D2_GPIO_PIN;
GPIO_Init(FSMC_D2_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D3_GPIO_PIN;
GPIO_Init(FSMC_D3_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D4_GPIO_PIN;
GPIO_Init(FSMC_D4_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D5_GPIO_PIN;
GPIO_Init(FSMC_D5_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D6_GPIO_PIN;
GPIO_Init(FSMC_D6_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D7_GPIO_PIN;
GPIO_Init(FSMC_D7_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D8_GPIO_PIN;
GPIO_Init(FSMC_D8_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D9_GPIO_PIN;
GPIO_Init(FSMC_D9_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D10_GPIO_PIN;
GPIO_Init(FSMC_D10_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D11_GPIO_PIN;
GPIO_Init(FSMC_D11_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D12_GPIO_PIN;
GPIO_Init(FSMC_D12_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D13_GPIO_PIN;
GPIO_Init(FSMC_D13_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D14_GPIO_PIN;
GPIO_Init(FSMC_D14_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_D15_GPIO_PIN;
GPIO_Init(FSMC_D15_GPIO_PORT, &GPIO_InitStructure);
/*�����ź���*/
GPIO_InitStructure.GPIO_Pin = FSMC_CS_GPIO_PIN;
GPIO_Init(FSMC_CS_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_WE_GPIO_PIN;
GPIO_Init(FSMC_WE_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_OE_GPIO_PIN;
GPIO_Init(FSMC_OE_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_UDQM_GPIO_PIN;
GPIO_Init(FSMC_UDQM_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = FSMC_LDQM_GPIO_PIN;
GPIO_Init(FSMC_LDQM_GPIO_PORT, &GPIO_InitStructure);
}
// дʱ������
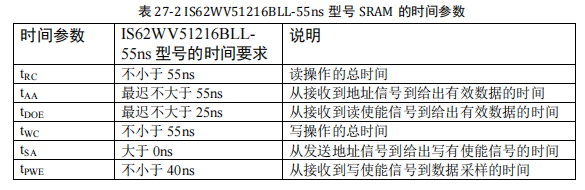
//ADDSET +1 + DATAST +1 > 55ns;
//DATAST +1 >40ns
//ADDSET +1 > 0 ns
// ����ʱ��
//ADDSET +1 > 25ns
//DATAST +1 > 0 ns
/ʱ�ӵ�λ 1.38*10-8S = 13.8ns
//дʱ��
//ADDSET
//DATAST
//
//��ʱ��
//ADDSET = 0
//DATAST = 2
//
//ADDSET +1 + DATAST +1 = (0+1+2+1)(13.8)=55.2> 55ns;
//DATAST +1 >=2+1*(13.8 = 41.4)40ns
//ADDSET +1 = 0+1*(13.8) = 13.8>0 ns
static void FSMC_ModleConfig(void){
//�ԼĴ�����������
FSMC_NORSRAMTimingInitTypeDef readTimingInitStruct ; //��ʱ��
FSMC_NORSRAMTimingInitTypeDef writeTimingInitStruct ; //дʱ��
FSMC_NORSRAMInitTypeDef SRAMInitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_FSMC,ENABLE); //ע��ʱ��ʹ��
//��
readTimingInitStruct.FSMC_AccessMode = FSMC_AccessMode_A ;/*���÷���ģʽ */
readTimingInitStruct.FSMC_AddressHoldTime = 0; //SRAM û���õ�
readTimingInitStruct.FSMC_BusTurnAroundDuration = 0;//SRAM û���õ�
readTimingInitStruct.FSMC_CLKDivision = 0;//SRAM û���õ�
readTimingInitStruct.FSMC_DataLatency = 0;//SRAM û���õ�
readTimingInitStruct.FSMC_AddressSetupTime = 0; //����ADDSET��λ13.8ns
readTimingInitStruct.FSMC_DataSetupTime =2;//����DATAST��λ13.8ns
//д
writeTimingInitStruct.FSMC_AccessMode = FSMC_AccessMode_A ;/*���÷���ģʽ */
writeTimingInitStruct.FSMC_AddressHoldTime = 0; //SRAM û���õ�
writeTimingInitStruct.FSMC_BusTurnAroundDuration = 0;//SRAM û���õ�
writeTimingInitStruct.FSMC_CLKDivision = 0;//SRAM û���õ�
writeTimingInitStruct.FSMC_DataLatency = 0;//SRAM û���õ�
writeTimingInitStruct.FSMC_AddressSetupTime = 0; //����ADDSET��λ13.8ns
writeTimingInitStruct.FSMC_DataSetupTime =2;//����DATAST��λ13.8ns
//���˶�ʱ��ṹ�����
SRAMInitStruct.FSMC_Bank = FSMC_Bank1_NORSRAM3;
SRAMInitStruct.FSMC_ExtendedMode = FSMC_ExtendedMode_Enable; //��дʱ��
SRAMInitStruct.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;
SRAMInitStruct.FSMC_MemoryType = FSMC_MemoryType_SRAM;
//SRAM û���õ�
SRAMInitStruct.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable ;
SRAMInitStruct.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable;
SRAMInitStruct.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable;
SRAMInitStruct.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
SRAMInitStruct.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
SRAMInitStruct.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
SRAMInitStruct.FSMC_WrapMode = FSMC_WrapMode_Disable;
SRAMInitStruct.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
SRAMInitStruct.FSMC_WriteOperation = FSMC_WriteOperation_Enable;
//��д�����ṹ������
SRAMInitStruct.FSMC_ReadWriteTimingStruct = &readTimingInitStruct;//��
SRAMInitStruct.FSMC_WriteTimingStruct = &writeTimingInitStruct;//д
//д���� ע��FSMC_ExtendedMode ���ó� FSMC_ExtendedMode_Enable ʱ������
// ������д��Ĵ���
FSMC_NORSRAMInit(&SRAMInitStruct);
//ʹ��FSMC
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM3,ENABLE);
}
/**
* @brief ����SRAM�Ƿ�����
* @param None
* @retval ��������1,�쳣����0
*/
uint8_t SRAM_Test(void){
/*д�����ݼ�����*/
uint32_t counter=0;
/* 8����� */
uint8_t ubWritedata_8b = 0, ubReaddata_8b = 0;
/* 16����� */
uint16_t uhWritedata_16b = 0, uhReaddata_16b = 0;
printf("���ڼ��SRAM,��8λ��16λ�ķ�ʽ��дsram...");
/*��8λ��ʽ��д����,��У��*/
/* ��SRAM����ȫ������Ϊ0 ,IS62WV51216_SIZE����8λΪ��λ�� */
for (counter = 0x00; counter < SRAM_SIZE; counter++)
{
*(__IO uint8_t*) (SRAM_BASE_ADDR + counter) = (uint8_t)0x0;
}
/* ������SRAMд������ 8λ */
for (counter = 0; counter < SRAM_SIZE; counter++)
{
*(__IO uint8_t*) (SRAM_BASE_ADDR + counter) = (uint8_t)(ubWritedata_8b + counter);
}
/* ��ȡ SRAM ���ݲ����*/
for(counter = 0; counter<SRAM_SIZE;counter++ )
{
ubReaddata_8b = *(__IO uint8_t*)(SRAM_BASE_ADDR + counter); //�Ӹõ�ַ��������
if(ubReaddata_8b != (uint8_t)(ubWritedata_8b + counter)) //�������,�������,��������,���ؼ��ʧ�ܽ����
{
printf("8λ���ݶ�д����!");
return 0;
}
}
/*��16λ��ʽ��д����,�����*/
/* ��SRAM����ȫ������Ϊ0 */
for (counter = 0x00; counter < SRAM_SIZE/2; counter++)
{
*(__IO uint16_t*) (SRAM_BASE_ADDR + 2*counter) = (uint16_t)0x00;
}
/* ������SRAMд������ 16λ */
for (counter = 0; counter < SRAM_SIZE/2; counter++)
{
*(__IO uint16_t*) (SRAM_BASE_ADDR + 2*counter) = (uint16_t)(uhWritedata_16b + counter);
}
/* ��ȡ SRAM ���ݲ����*/
for(counter = 0; counter<SRAM_SIZE/2;counter++ )
{
uhReaddata_16b = *(__IO uint16_t*)(SRAM_BASE_ADDR + 2*counter); //�Ӹõ�ַ��������
if(uhReaddata_16b != (uint16_t)(uhWritedata_16b + counter)) //�������,�������,��������,���ؼ��ʧ�ܽ����
{
printf("16λ���ݶ�д����!\n");
return 0;
}
}
printf("SRAM���������!\n");
/*�������,return 1 */
return 1;
}
/**
* @brief void SRAM_Init(void)
* @param ��ʼ��
* @retval
*/
void SRAM_Init(void){
SRAM_GPIO_Config();
FSMC_ModleConfig();
}
static uint8_t testSRAM_Value __attribute__ ((at (SRAM_BASE_ADDR)));
/**
* @brief void SRAM_Write(void)
* @param None
* @retval
*/
void SRAM_Write(void){
uint8_t* SRAM_P ;
uint16_t* SRAM_P16 ;
float* SRAM_Pf ;
//---------------------------------
SRAM_P = (uint8_t*)SRAM_BASE_ADDR;
*SRAM_P = 0xA2;
printf("����������Ϊ1: 0x%x\n",*SRAM_P);
//---------------------------------
SRAM_P16 = (uint16_t*)SRAM_BASE_ADDR;
*SRAM_P16 = 0x2AA2;
printf("����������Ϊ2: 0x%x\n",*SRAM_P16);
//---------------------------------
SRAM_Pf = (float*)SRAM_BASE_ADDR;
*SRAM_Pf = 83.65;
printf("����������Ϊ3: 0x%.2f\n",*SRAM_Pf);
//-----------���������----------------------
testSRAM_Value = 0x6A;
printf("����������Ϊ1: 0x%x\n",testSRAM_Value);
}
���� ϵͳ�ļ�diskio.c
�������� :
/*-----------------------------------------------------------------------*/
/* Low level disk I/O module skeleton for FatFs (C)ChaN, 2014 */
/*-----------------------------------------------------------------------*/
/* If a working storage control module is available, it should be */
/* attached to the FatFs via a glue function rather than modifying it. */
/* This is an example of glue functions to attach various exsisting */
/* storage control modules to the FatFs module with a defined API. */
/*-----------------------------------------------------------------------*/
#include "diskio.h" /* FatFs lower layer API */
#include "ff.h"
#include "SPI_book.h"
//#include "usbdisk.h" /* Example: Header file of existing USB MSD control module */
//#include "atadrive.h" /* Example: Header file of existing ATA harddisk control module */
//#include "sdcard.h" /* Example: Header file of existing MMC/SDC contorl module */
/* Definitions of physical drive number for each drive */
#define ATA 0 /* Example: Map ATA harddisk to physical drive 0 */
#define MMC 1 /* Example: Map MMC/SD card to physical drive 1 */
#define USB 2 /* Example: Map USB MSD to physical drive 2 */
#define SD_CARD 0
#define SPI_FLASH 1
/*-----------------------------------------------------------------------*/
/* Get Drive Status */
/*-----------------------------------------------------------------------*/
DSTATUS disk_status (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
DSTATUS stat = STA_NOINIT;
// int result;
switch (pdrv) {
case SD_CARD : break;
case SPI_FLASH :
if(SPI_Read_ID() == _SPI_FLASH_ID){
stat = RES_OK;
}else{
stat = RES_ERROR;
}
break;
default:
stat = STA_NOINIT;
}
return stat;
}
//disk_status ����ֻ��һ������ pdrv,��ʾ������š�һ�����Ƕ���ʹ�� switch ����ʵ
//�ֶ� pdrv �ķ�֧�жϡ����� SD ��ֻ��Ԥ���ӿ�,���ռ��ɡ����� SPI Flash оƬ,����ֱ
//�ӵ����� SPI_FLASH_ReadID()��ȡ�豸 ID,
/*-----------------------------------------------------------------------*/
/* Inidialize a Drive */
/*-----------------------------------------------------------------------*/
DSTATUS disk_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
DSTATUS stat = STA_NOINIT;
// int result;
switch (pdrv) {
case SD_CARD : break;
case SPI_FLASH :
SPI_FLASH_Init();
SPI_Flash_WAKEUP();
stat = disk_status(SPI_FLASH);
break;
default:
stat = STA_NOINIT;
}
return stat;
}
//disk_initialize ����Ҳ����һ������ pdrv,����ָ���豸������š����� SPI Flash оƬ
//���ǵ��� SPI_FLASH_Init()����ʵ�ֶ� SPI Flash оƬ���� GPIO ��ʼ�������Լ� SPI ͨ��
//�������á�SPI_Flash_WAKEUP()�������� SPI Flash оƬ,�� SPI Flash оƬ����˯��ģʽ
//ʱ��Ҫ����оƬ�ſ��Խ��ж�д������
/*-----------------------------------------------------------------------*/
/* Read Sector(s) */
/*-----------------------------------------------------------------------*/
DRESULT disk_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
DRESULT res = RES_PARERR;
//int result;
switch (pdrv) {
case SD_CARD : break;
case SPI_FLASH :
// ����ƫ��2MB �ⲿFlash �ļ�ϵͳ�ռ���� SPI_FLAH�����6MB�ռ�
sector += 512;
SPI_Read_Data(buff,(sector << 12),(count << 12));
res = RES_OK ;
break;
default:
res = RES_PARERR;
}
return res;
}
//SPI Flash оƬ�ͺ�Ϊ W25Q64FV,ÿ��������СΪ 4096 ���ֽ�(4KB),
//�ܹ��� 8M �ֽڿռ�,Ϊ���ݺ���ʵ�����,����ֻ���� 6MB �ռ����� FatFs ʹ��,
//ǰ���� 2MB �ռ���������ʵ����Ҫ,�� FatFs �Ǵ� 2MB �ռ俪ʼ,Ϊʵ�����Ч����Ҫ
//�����еĶ�д��ַ��ƫ�� 512 �������ռ�
/*-----------------------------------------------------------------------*/
/* Write Sector(s) */
/*-----------------------------------------------------------------------*/
#if _USE_WRITE
DRESULT disk_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
DRESULT res = RES_PARERR;
//int result;
if(!count){return res;}
switch (pdrv) {
case SD_CARD : break;
case SPI_FLASH :
// ����ƫ��2MB �ⲿFlash �ļ�ϵͳ�ռ���� SPI_FLAH�����6MB�ռ�
sector += 512;
SPI_Erase_Sector(sector << 12);
SPI_BufferWrite_Data((uint8_t *)buff ,sector << 12,count << 12);
res = RES_OK ;
break;
default:
res = RES_PARERR;
}
return res;
}
#endif
//disk_write �������ĸ��β�,pdrv Ϊ�豸������š�buff ָ���д���������ݵ���ַ��
//sector,ָ��Ҫд�����ݵ�������ַ��count ָ���������������� SPI Flash оƬ,��д��
//����֮ǰ��Ҫ�Ȳ���,�����õ�������������(SPI_FLASH_SectorErase)��Ȼ������ڵ���
//����д�뺯��(SPI_FLASH_BufferWrite)������д�뵽ָ��λ���ڡ�
/*-----------------------------------------------------------------------*/
/* Miscellaneous Functions */
/*-----------------------------------------------------------------------*/
#if _USE_IOCTL
DRESULT disk_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
DRESULT res = RES_PARERR;
// int result;
switch (pdrv) {
case SD_CARD : break;
case SPI_FLASH :{
switch(cmd){
//���� �����ĸ��� 1280*4096/1024/1024 = 5MB
case GET_SECTOR_COUNT:
*(DWORD * )buff = 1280;
break;
//����ÿһ�������Ĵ�С
case GET_SECTOR_SIZE:
*(DWORD * )buff = 4096;
break;
case GET_BLOCK_SIZE:
*(DWORD * )buff = 1;
break;
default:
return RES_PARERR;
}
res = RES_OK;
break;
}
default:
res = RES_PARERR;
}
return res;
}
#endif
DWORD get_fattime(void) {
/* ���ص�ǰʱ��� */
return ((DWORD)(2015 - 1980) << 25) /* Year 2015 */
| ((DWORD)1 << 21) /* Month 1 */
| ((DWORD)1 << 16) /* Mday 1 */
| ((DWORD)0 << 11) /* Hour 0 */
| ((DWORD)0 << 5) /* Min 0 */
| ((DWORD)0 >> 1); /* Sec 0 */
}
��ͷ�ļ��ļ�diskio.h
�������� :
/*---------------------------------------------------------------------------/
/ FatFs - FAT file system module configuration file R0.11a (C)ChaN, 2015
/---------------------------------------------------------------------------*/
#define _FFCONF 64180 /* Revision ID */
/*---------------------------------------------------------------------------/
/ Function Configurations
/---------------------------------------------------------------------------*/
#define _FS_READONLY 0
/* This option switches read-only configuration. (0:Read/Write or 1:Read-only)
/ Read-only configuration removes writing API functions, f_write(), f_sync(),
/ f_unlink(), f_mkdir(), f_chmod(), f_rename(), f_truncate(), f_getfree()
/ and optional writing functions as well. */
#define _FS_MINIMIZE 0
/* This option defines minimization level to remove some basic API functions.
/
/ 0: All basic functions are enabled.
/ 1: f_stat(), f_getfree(), f_unlink(), f_mkdir(), f_chmod(), f_utime(),
/ f_truncate() and f_rename() function are removed.
/ 2: f_opendir(), f_readdir() and f_closedir() are removed in addition to 1.
/ 3: f_lseek() function is removed in addition to 2. */
#define _USE_STRFUNC 1
/* This option switches string functions, f_gets(), f_putc(), f_puts() and
/ f_printf().
/
/ 0: Disable string functions.
/ 1: Enable without LF-CRLF conversion.
/ 2: Enable with LF-CRLF conversion. */
#define _USE_FIND 0
/* This option switches filtered directory read feature and related functions,
/ f_findfirst() and f_findnext(). (0:Disable or 1:Enable) */
#define _USE_MKFS 1
/* This option switches f_mkfs() function. (0:Disable or 1:Enable) */
//��ʽ������ѡ��,Ϊʹ�� FatFs ��ʽ������,��Ҫ��������Ϊ 1
#define _USE_FASTSEEK 0
/* This option switches fast seek feature. (0:Disable or 1:Enable) */
#define _USE_LABEL 0
/* This option switches volume label functions, f_getlabel() and f_setlabel().
/ (0:Disable or 1:Enable) */
#define _USE_FORWARD 0
/* This option switches f_forward() function. (0:Disable or 1:Enable)
/ To enable it, also _FS_TINY need to be set to 1. */
/*---------------------------------------------------------------------------/
/ Locale and Namespace Configurations
/---------------------------------------------------------------------------*/
#define _CODE_PAGE 936
//���Թ���ѡ��
/* This option specifies the OEM code page to be used on the target system.
/ Incorrect setting of the code page can cause a file open failure.
/
/ 1 - ASCII (No extended character. Non-LFN cfg. only)
/ 437 - U.S.
/ 720 - Arabic
/ 737 - Greek
/ 771 - KBL
/ 775 - Baltic
/ 850 - Latin 1
/ 852 - Latin 2
/ 855 - Cyrillic
/ 857 - Turkish
/ 860 - Portuguese
/ 861 - Icelandic
/ 862 - Hebrew
/ 863 - Canadian French
/ 864 - Arabic
/ 865 - Nordic
/ 866 - Russian
/ 869 - Greek 2
/ 932 - Japanese (DBCS)
/ 936 - Simplified Chinese (DBCS)
/ 949 - Korean (DBCS)
/ 950 - Traditional Chinese (DBCS)
*/
#define _USE_LFN 2
//2: Enable LFN with dynamic working buffer on the STACK.
//���ļ���֧��
#define _MAX_LFN 255
/* The _USE_LFN option switches the LFN feature.
/
/ 0: Disable LFN feature. _MAX_LFN has no effect.
/ 1: Enable LFN with static working buffer on the BSS. Always NOT thread-safe.
/ 2: Enable LFN with dynamic working buffer on the STACK.
/ 3: Enable LFN with dynamic working buffer on the HEAP.
/
/ When enable the LFN feature, Unicode handling functions (option/unicode.c) must
/ be added to the project. The LFN working buffer occupies (_MAX_LFN + 1) * 2 bytes.
/ When use stack for the working buffer, take care on stack overflow. When use heap
/ memory for the working buffer, memory management functions, ff_memalloc() and
/ ff_memfree(), must be added to the project. */
#define _LFN_UNICODE 0
/* This option switches character encoding on the API. (0:ANSI/OEM or 1:Unicode)
/ To use Unicode string for the path name, enable LFN feature and set _LFN_UNICODE
/ to 1. This option also affects behavior of string I/O functions. */
#define _STRF_ENCODE 3
/* When _LFN_UNICODE is 1, this option selects the character encoding on the file to
/ be read/written via string I/O functions, f_gets(), f_putc(), f_puts and f_printf().
/
/ 0: ANSI/OEM
/ 1: UTF-16LE
/ 2: UTF-16BE
/ 3: UTF-8
/
/ When _LFN_UNICODE is 0, this option has no effect. */
#define _FS_RPATH 0
/* This option configures relative path feature.
/
/ 0: Disable relative path feature and remove related functions.
/ 1: Enable relative path feature. f_chdir() and f_chdrive() are available.
/ 2: f_getcwd() function is available in addition to 1.
/
/ Note that directory items read via f_readdir() are affected by this option. */
/*---------------------------------------------------------------------------/
/ Drive/Volume Configurations
/---------------------------------------------------------------------------*/
#define _VOLUMES 2
/* Number of volumes (logical drives) to be used. */
//����Ԥ�� SD ���� SPI Flash оƬ
#define _STR_VOLUME_ID 0
#define _VOLUME_STRS "RAM","NAND","CF","SD1","SD2","USB1","USB2","USB3"
/* _STR_VOLUME_ID option switches string volume ID feature.
/ When _STR_VOLUME_ID is set to 1, also pre-defined strings can be used as drive
/ number in the path name. _VOLUME_STRS defines the drive ID strings for each
/ logical drives. Number of items must be equal to _VOLUMES. Valid characters for
/ the drive ID strings are: A-Z and 0-9. */
#define _MULTI_PARTITION 0
/* This option switches multi-partition feature. By default (0), each logical drive
/ number is bound to the same physical drive number and only an FAT volume found on
/ the physical drive will be mounted. When multi-partition feature is enabled (1),
/ each logical drive number is bound to arbitrary physical drive and partition
/ listed in the VolToPart[]. Also f_fdisk() funciton will be available. */
#define _MIN_SS 512
#define _MAX_SS 4096
//SPI Flash оƬ������Сһ������Ϊ 4096 �ֽ�
/* These options configure the range of sector size to be supported. (512, 1024,
/ 2048 or 4096) Always set both 512 for most systems, all type of memory cards and
/ harddisk. But a larger value may be required for on-board flash memory and some
/ type of optical media. When _MAX_SS is larger than _MIN_SS, FatFs is configured
/ to variable sector size and GET_SECTOR_SIZE command must be implemented to the
/ disk_ioctl() function. */
#define _USE_TRIM 0
/* This option switches ATA-TRIM feature. (0:Disable or 1:Enable)
/ To enable Trim feature, also CTRL_TRIM command should be implemented to the
/ disk_ioctl() function. */
#define _FS_NOFSINFO 0
/* If you need to know correct free space on the FAT32 volume, set bit 0 of this
/ option, and f_getfree() function at first time after volume mount will force
/ a full FAT scan. Bit 1 controls the use of last allocated cluster number.
/
/ bit0=0: Use free cluster count in the FSINFO if available.
/ bit0=1: Do not trust free cluster count in the FSINFO.
/ bit1=0: Use last allocated cluster number in the FSINFO if available.
/ bit1=1: Do not trust last allocated cluster number in the FSINFO.
*/
/*---------------------------------------------------------------------------/
/ System Configurations
/---------------------------------------------------------------------------*/
#define _FS_TINY 0
/* This option switches tiny buffer configuration. (0:Normal or 1:Tiny)
/ At the tiny configuration, size of the file object (FIL) is reduced _MAX_SS
/ bytes. Instead of private sector buffer eliminated from the file object,
/ common sector buffer in the file system object (FATFS) is used for the file
/ data transfer. */
#define _FS_NORTC 0
#define _NORTC_MON 1
#define _NORTC_MDAY 1
#define _NORTC_YEAR 2015
/* The _FS_NORTC option switches timestamp feature. If the system does not have
/ an RTC function or valid timestamp is not needed, set _FS_NORTC to 1 to disable
/ the timestamp feature. All objects modified by FatFs will have a fixed timestamp
/ defined by _NORTC_MON, _NORTC_MDAY and _NORTC_YEAR.
/ When timestamp feature is enabled (_FS_NORTC == 0), get_fattime() function need
/ to be added to the project to read current time form RTC. _NORTC_MON,
/ _NORTC_MDAY and _NORTC_YEAR have no effect.
/ These options have no effect at read-only configuration (_FS_READONLY == 1). */
#define _FS_LOCK 0
/* The _FS_LOCK option switches file lock feature to control duplicated file open
/ and illegal operation to open objects. This option must be 0 when _FS_READONLY
/ is 1.
/
/ 0: Disable file lock feature. To avoid volume corruption, application program
/ should avoid illegal open, remove and rename to the open objects.
/ >0: Enable file lock feature. The value defines how many files/sub-directories
/ can be opened simultaneously under file lock control. Note that the file
/ lock feature is independent of re-entrancy. */
#define _FS_REENTRANT 0
#define _FS_TIMEOUT 1000
#define _SYNC_t HANDLE
/* The _FS_REENTRANT option switches the re-entrancy (thread safe) of the FatFs
/ module itself. Note that regardless of this option, file access to different
/ volume is always re-entrant and volume control functions, f_mount(), f_mkfs()
/ and f_fdisk() function, are always not re-entrant. Only file/directory access
/ to the same volume is under control of this feature.
/
/ 0: Disable re-entrancy. _FS_TIMEOUT and _SYNC_t have no effect.
/ 1: Enable re-entrancy. Also user provided synchronization handlers,
/ ff_req_grant(), ff_rel_grant(), ff_del_syncobj() and ff_cre_syncobj()
/ function, must be added to the project. Samples are available in
/ option/syscall.c.
/
/ The _FS_TIMEOUT defines timeout period in unit of time tick.
/ The _SYNC_t defines O/S dependent sync object type. e.g. HANDLE, ID, OS_EVENT*,
/ SemaphoreHandle_t and etc.. A header file for O/S definitions needs to be
/ included somewhere in the scope of ff.c. */
#define _WORD_ACCESS 0
/* The _WORD_ACCESS option is an only platform dependent option. It defines
/ which access method is used to the word data on the FAT volume.
/
/ 0: Byte-by-byte access. Always compatible with all platforms.
/ 1: Word access. Do not choose this unless under both the following conditions.
/
/ * Address misaligned memory access is always allowed to ALL instructions.
/ * Byte order on the memory is little-endian.
/
/ If it is the case, _WORD_ACCESS can also be set to 1 to reduce code size.
/ Following table shows allowable settings of some type of processors.
/
/ ARM7TDMI 0 *2 ColdFire 0 *1 V850E 0 *2
/ Cortex-M3 0 *3 Z80 0/1 V850ES 0/1
/ Cortex-M0 0 *2 x86 0/1 TLCS-870 0/1
/ AVR 0/1 RX600(LE) 0/1 TLCS-900 0/1
/ AVR32 0 *1 RL78 0 *2 R32C 0 *2
/ PIC18 0/1 SH-2 0 *1 M16C 0/1
/ PIC24 0 *2 H8S 0 *1 MSP430 0 *2
/ PIC32 0 *1 H8/300H 0 *1 8051 0/1
/
/ *1:Big-endian.
/ *2:Unaligned memory access is not supported.
/ *3:Some compilers generate LDM/STM for mem_cpy function.
*/
����FatFs����� ͷ�ļ� FatFs_book.h
�������� :
#ifndef __FATFS_BOOK_H_
#define __FATFS_BOOK_H_
#include "ff.h" /* Declarations of FatFs API */
extern FATFS fs; /* FatFs �ļ�ϵͳ���� */
extern FIL fnew; /* �ļ����� */
extern FRESULT res_flash; /* �ļ�������� */
extern UINT fnum; /* �ļ��ɹ���д���� */
extern BYTE FATFS_buffer[0]; /* �������� */
extern BYTE textFile_Buffer[];
extern BYTE textFile_Buffer2[];
extern BYTE File_Read_Buffer[1024];
#define textFile_Buffer "��ӭ�Լ���ɵ�һ�λع���������,������� �����Ǹ�������,�½��ļ�ϵͳ�����ļ�\r\n"
#define FileTest_ADDR_Buffer_Document "1:Wangqi.txt"
#define FileTest_ADDR_Buffer_NewDocument "1:Wangqi/Wangqi.txt"
#define FileTest_ADDR_Buffer_path "1:test"
#define FileTest_ADDR_Buffer_NewDocument2 "1:test/testdir.txt"
FRESULT FatFs_equipment_flash(
const TCHAR* path
);
FRESULT FatFs_Close_flash(
const TCHAR* path
);
BYTE* FatFs_document_Text(
const TCHAR* _File_ADDR ,
BYTE* Text_Buffer
);
void FatFs_document_set_content(
const TCHAR* _File_ADDR ,
const TCHAR* _File_OldPath ,
const TCHAR* _File_NewPath
);
FRESULT file_check(const TCHAR* FileTest_ADDR);
FRESULT Scan_file_Check(const TCHAR* File_ADDR);
#endif
����FatFs����� ͷ�ļ� FatFs_book.c
�������� :
#include "FatFs_book.h"
#include "Systick_book.h"
#include "USART_book.h"
#include "string.h"
FATFS fs; /* FatFs �ļ�ϵͳ���� */
FIL fnew; /* �ļ����� */
FRESULT res_flash; /* �ļ�������� */
UINT fnum; /* �ļ��ɹ���д���� */
BYTE FATFS_buffer[0]; /* �������� */
/**************************************************************
* @brief
* FRESULT FatFs_equipment_flash(const TCHAR* path )
* @param
*
*FatFs �ĵ�һ����������ʹ�� f_mount �������ع�������f_mount �����������β�,��
*һ��������ָ�� FATFS ����ָ��,�����ֵΪ NULL ����ȡ�������豸���ء��ڶ�������
*Ϊ���豸���,ʹ���豸��·����ʾ,�������豸��Źҹ�,�ڴ����嵥 26-1 �����Ƕ�
*�� SPI Flash оƬ�������Ϊ 1,��������ʹ�á�1:����������������ѡ 0 �� 1,1 ��ʾ��
*������,0 ��ʾ����������,�ӳٹ��ء� f_mount �����᷵��һ�� FRESULT ����ֵ,ָʾ
*���������
*��� f_mount ��������ֵΪ FR_NO_FILESYSTEM,˵��û�� FAT �ļ�ϵͳ,������
*������ SPI Flash оƬ��û�� FAT �ļ�ϵͳ�����Ǿͱ���������豸���и�ʽ��������ʹ��
*f_mkfs ��������ʵ�ָ�ʽ��������f_mkfs �����������β�,��һ������Ϊ���豸���;
*�ڶ�������ѡ 0 ���� 1,0 ��ʾ�豸Ϊһ��Ӳ��,1 ��ʾ�豸Ϊ���̡�����������ָ������
*��С,���Ϊ 0,��ʾͨ�������嵥 26-6 �� disk_ioctl ������ȡ����ʽ���ɹ�����Ҫ��ȡ��
*����ԭ���豸,�����¹����豸��
*
*/
FRESULT FatFs_equipment_flash(
const TCHAR* path
){
//���ⲿ SPI Flash �����ļ�ϵͳ,�ļ�ϵͳ����ʱ��� SPI �豸��ʼ��
//��ʼ������������������
//f_mount()->find_volume()->disk_initialize->SPI_FLASH_Init()
DIR dir;
FATFS *pfs;
DWORD fre_clust , fre_sect , tot_sect ;
printf("\n********** �ⲿSPIFlash�����ļ�ϵͳ **********\r\n");
printf(" ���ⲿSPI Flash�����ļ�ϵͳ,�ļ�ϵͳ����ʱ���SPI�豸��ʼ��\r\n");
res_flash = f_mount(&fs ,path,1); //SPI Flash оƬ�������Ϊ 1,��������ʹ�á�1:����
/* Pointer to the file system object (NULL:unmount)*/
/* Logical drive number to be mounted/unmounted */
/* 0:Do not mount (delayed mount), 1:Mount immediately */
/*----------------------- ��ʽ������ -----------------*/
/* ���û���ļ�ϵͳ��ʽ�����������ļ�ϵͳ */
if(res_flash == FR_NO_FILESYSTEM ){
printf("��FLASH ��û���ļ�ϵͳ,��������Flash FatFS ��ʽ��...\r\n");
/* ��ʽ�� */
res_flash=f_mkfs(path,0,0);/* Create a file system on the volume */
/* Logical drive number */
/* Partitioning rule 0:FDISK, 1:SFD */
/* Size of allocation unit in unit of byte or sector */
//��ʽ���,��ȡ������
if(res_flash == FR_OK ){
printf("��FLASH �ѳɹ���ʽ���ļ�ϵͳ��\r\n");
res_flash = f_mount(NULL ,path ,1);
//���¹���
res_flash = f_mount(&fs ,path ,1);
}else{
printf("����ʽ��ʧ�ܡ� \r\n");
return res_flash;
}
}
else if(res_flash != FR_OK){
printf("!�ⲿ Flash �����ļ�ϵͳʧ�ܡ�(%d)\r\n",res_flash);
printf("!����ԭ��:SPI Flash ��ʼ�����ɹ���\r\n");
return res_flash;
}
else{
printf("���ļ�ϵͳ���سɹ�,���Խ��ж�д����\r\n");
}
//��ȡ�豸��Ϣ�Ϳռ�Ĵ�С
res_flash = f_getfree(path ,&fre_clust ,&pfs );
//����õ��������������Ϳ���������
tot_sect = (pfs->n_fatent-2)*pfs->csize ;
fre_sect = fre_clust * pfs->csize ;
/* ��ӡ��Ϣ(4096 �ֽ�/����) */
printf("���豸�ܿռ�:%10lu KB��\n�����ÿռ�: %10lu KB��\r\n", tot_sect<<2, fre_sect<<2);
return FR_OK;
}
/**************************************************************
* @brief
* FRESULT FatFs_Close_flash( const TCHAR* path )
* @param
* �ر�Flash����
**************************************************************/
FRESULT FatFs_Close_flash(
const TCHAR* path
){
res_flash=f_mkfs(path,0,0);
/* ����ʹ���ļ�ϵͳ,ȡ�������ļ�ϵͳ */
return f_mount(NULL ,path ,1);
}
/**************************************************************
* @brief
* void FatFs_document_Text(
* const TCHAR* _File_ADDR , �ļ���Ŀ¼
* BYTE* Text_Buffer ��Ҫд�������
*)
* @param
* �ر�Flash�ļ��Ķ�д����
**************************************************************/
BYTE* FatFs_document_Text(
const TCHAR* _File_ADDR ,
BYTE* Text_Buffer
){
BYTE File_Read_Buffer[1024]={0} ;
printf("\n******** �ļ�%s��λ��ʽ��д�빦�ܲ��� ********\r\n",File_Read_Buffer);
res_flash = f_open(&fnew , _File_ADDR, FA_OPEN_ALWAYS|FA_WRITE|FA_READ );
if( res_flash == FR_OK ){
//res_flash = f_write(&fnew,Text_Buffer ,sizeof(Text_Buffer), &fnum); ������������:sizeof(Text_Buffer)
//f_printf(&fnew ,Text_Buffer );
printf("******** �ļ���λ������ ********\r\n");
res_flash = f_lseek(&fnew , f_size(&fnew)); //�ļ���λ�� �ļ���ĩβ Move file pointer of a file object
if( res_flash == FR_OK ){
//��ʽ��д�� ������ʽ����printf����
f_printf(&fnew ,Text_Buffer );
res_flash = f_lseek(&fnew,0);
res_flash = f_read(&fnew , File_Read_Buffer , f_size(&fnew),&fnum );
if(res_flash == FR_OK){
printf("> �ļ�����:\n%s\n" ,File_Read_Buffer );
}
}
}
else{
printf("!! ���ļ�ʧ��:%d\n",res_flash);
printf("!! ������Ҫ�ٴ����С�FatFs��ֲ���д���ԡ�����\n");
}
f_close(&fnew);
return File_Read_Buffer;
}
/**************************************************************
* @brief
*void FatFs_document_set_content(
* const TCHAR* _File_ADDR , //�ļ�ԭʼ����·��
* const TCHAR* _File_OldPath ,//�����µ��ļ���Ŀ¼
* const TCHAR* _File_NewPath //�ļ��ƶ��Ժ���ļ�Ŀ¼
*)
* @param
* �ļ�Ŀ¼�ĸ���
**************************************************************/
void FatFs_document_set_content(
const TCHAR* _File_ADDR ,
const TCHAR* _File_OldPath ,
const TCHAR* _File_NewPath
){
DIR dir;
//���Դ�Ŀ¼��
printf("\n********** Ŀ¼���������������ܲ��� **********\r\n");
res_flash = f_opendir(&dir,_File_OldPath);
if(res_flash != FR_OK){
printf("!! ��Ŀ¼%s ʧ�ܿ�ʼ���Դ����µ�Ŀ¼\n",_File_OldPath);
res_flash = f_mkdir(_File_OldPath);
res_flash = f_opendir(&dir,_File_OldPath);
if(res_flash != FR_OK){
printf("!! �����µ�Ŀ¼����ʧ��(%d) \n",res_flash);
return;
}
}
else{
printf("!! ���Ŀ¼�Ѿ�����,�ر���\n");
res_flash = f_closedir(&dir);
//ɾ���ļ�
f_unlink(_File_NewPath);
}
//���������ƶ��ļ�
res_flash=f_rename(_File_ADDR , _File_NewPath);
printf("> ���������ƶ��ļ�%d��� \n",res_flash);
}
/**************************************************************
* @brief
* FRESULT file_check(const TCHAR* File_ADDR)
* @param
* �ļ����ԵIJ鿴
**************************************************************/
FRESULT file_check(const TCHAR* File_ADDR){
static FILINFO fno;
printf("\n********** file_check ���� **********\r\n");
/* ��ȡ�ļ���Ϣ,����ȷ���ļ�����*/
res_flash = f_stat(File_ADDR,&fno);
if(res_flash==FR_OK){
printf("%s �ļ���Ϣ:\n",File_ADDR);
printf("���ļ���С: %ld(�ֽ�)\n", fno.fsize);
printf("��ʱ���: %u/%02u/%02u, %02u:%02u\n",
(fno.fdate >> 9) + 1980, fno.fdate >> 5 & 15, fno.fdate & 31,
fno.ftime >> 11, fno.ftime >> 5 & 63);
printf("������: %c%c%c%c%c\n\n",
(fno.fattrib & AM_DIR) ? 'D' : '-', // ��һ��Ŀ¼
(fno.fattrib & AM_RDO) ? 'R' : '-', // ֻ���ļ�
(fno.fattrib & AM_HID) ? 'H' : '-', // �����ļ�
(fno.fattrib & AM_SYS) ? 'S' : '-', // ϵͳ�ļ�
(fno.fattrib & AM_ARC) ? 'A' : '-'); // �����ļ�
}
else{
printf("������ %ld(�ֽ�)\n",res_flash);
}
return res_flash;
}
/**************************************************************
* @brief
* FRESULT scan_file(char* File_ADDR)
* @param
* �ļ�Ŀ¼���ݵIJ鿴
**************************************************************/
static FRESULT scan_file(char* File_ADDR){
FRESULT res; //�����ڵݹ���̱��ĵı���
FILINFO fno;
DIR dir;
int i;
TCHAR* fn;
#if _USE_LFN
//���ļ���֧��
//����������Ҫ2���ֽڱ���һ����
static char lfn[_MAX_LFN*2 + 1];
fno.lfname = lfn;
fno.lfsize = sizeof(lfn);
#endif
//��Ŀ¼
res = f_opendir(&dir, File_ADDR);
if(res == FR_OK){
i = strlen(File_ADDR);
while(1){
//��ȡ Ŀ¼�µ�����,�ٶ����Զ���ȡ��һ���ļ�
res = f_readdir(&dir , &fno);
//Ϊ��ʱ���ʾ��ȡ���
if((res != FR_OK) || (fno.fname[0] == 0 )){
break;}
#if _USE_LFN
fn = *fno.lfname ?fno.lfname : fno.fname ;
#else
fn = fno.fname;
#endif
//��ʾ��ǰĿ¼����
if(*fn == '.'){continue;}
//Ŀ¼ �ݹ��ȡ
if( fno.fattrib & AM_DIR ){
//�ϳ�����Ŀ¼��
sprintf(&File_ADDR[i], "/%s", fn);
//�ݹ����
res = scan_file(File_ADDR);
//��ʧ��,����ѭ��
File_ADDR[i] = 0;
if(res != FR_OK ){break;}
}else{
printf( "%s/%s\r\n" , File_ADDR , fn);
}
}
}
else{
printf("������ %d \n",res);
}
return res;
}
/**************************************************************
* @brief
* FRESULT Scan_file_Check(const TCHAR* File_ADDR)
* @param
* �ļ�Ŀ¼���ݵIJ鿴
**************************************************************/
FRESULT Scan_file_Check(const TCHAR* File_ADDR){
BYTE fpath[100]; /* ���浱ǰɨ��·�� */
printf("\n********** file_·������ **********\r\n");
strcpy(fpath,File_ADDR);
return scan_file(fpath);
}
����SPI����� ͷ�ļ� SPI_book.h
�������� :
#ifndef __SPI_BOOK_H_
#define __SPI_BOOK_H_
#include "stm32f10x.h"
//#define _SPI_FLASH_ID 0xEF3015 //W25X16
//#define _SPI_FLASH_ID 0xEF4015 //W25Q16
//#define _SPI_FLASH_ID 0XEF4018 //W25Q128
#define _SPI_FLASH_ID 0XEF4017 //W25Q64
//---------------- �����װ�� I2C ͨѶ������Ϣ -------------------
#define _FLASH_SPIx SPI1
#define _FLASH_SPI_APBxClock_FUN RCC_APB2PeriphClockCmd
#define _FLASH_SPI_CLK RCC_APB2Periph_SPI1
#define _FLASH_SPI_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define _FLASH_SPI_GPIO_CLK RCC_APB2Periph_GPIOA
#define _FLASH_SPI_SCL_PORT GPIOA
#define _FLASH_SPI_SCL_PIN GPIO_Pin_5
#define _FLASH_SPI_MISO_PORT GPIOA
#define _FLASH_SPI_MISO_PIN GPIO_Pin_6
#define _FLASH_SPI_MOSI_PORT GPIOA
#define _FLASH_SPI_MOSI_PIN GPIO_Pin_7
#define _FLASH_SPI_CSS_PORT GPIOA
#define _FLASH_SPI_CSS_PIN GPIO_Pin_4
//FLASH_SPI ��������
#define _FLASH_CSS_HIGH() _FLASH_SPI_CSS_PORT->BSRR = _FLASH_SPI_CSS_PIN
#define _FLASH_CSS_LOW() _FLASH_SPI_CSS_PORT->BRR = _FLASH_SPI_CSS_PIN
/*ͨѶ�ȴ���ʱʱ��*/
#define FLASH_SPI_TIMEOUT ((uint32_t)0x6000)
#define FLASH_SPI_LONG_TIMEOUT ((uint32_t)(10*FLASH_SPI_TIMEOUT))
//��Ϣ���
#define FLASH_ERROR(fmt,arg...) printf("<<-FLASH-ERROR->> "fmt"\n",##arg)
//
#define SPI_PAGE_SIZE 4096
#define SPI_PAGE_Write_SIZE 256
//FLASH ָ��
#define FLASH_SPI_DUMMY 0x00
#define FLASH_SPI_READ_JEDEC_ID 0x9f
#define FLASH_SPI_REASE_SECTOR 0x20
#define FLASH_SPI_READ_STATUS 0x05
#define FLASH_SPI_READ_DATA 0x03
#define FLASH_SPI_WRITE_ENABLE 0x06
#define FLASH_SPI_WRITE_DATA 0x02
#define FLASH_SPI_ChipErase 0xC7
void SPI_FLASH_Init(void);
uint32_t SPI_Read_ID(void);
uint32_t SPI_Read_DeviceID(void);
void SPI_Erase_Sector(uint32_t addr);
void SPI_FLASH_BulkErase(void);
void SPI_Read_Data(uint8_t *readBuffer , uint32_t addr ,uint16_t numByteToRead );
void SPI_BufferRead_Data(uint8_t *writeBuffer , uint32_t WriteAddr ,uint16_t numByteToWrite );
void SPI_Write_Data(uint8_t *writeBuffer , uint32_t addr ,uint16_t numByteToRead );
void SPI_BufferWrite_Data(uint8_t *writeBuffer , uint32_t WriteAddr ,uint16_t numByteToWrite );
void SPI_Show_Data(uint8_t *readBuffer , uint16_t numByteToRead);
#endif
����SPI����� ͷ�ļ� SPI_book.c
�������� :
#include "SPI_book.h"
#include "Systick_book.h"
static __IO uint32_t SPITimeout = FLASH_SPI_LONG_TIMEOUT;
/**
* @brief SPII/O����
* @param ��
* @retval ��
*/
static void SPI_GPIO_Config(void){
GPIO_InitTypeDef GPIO_InitStructure;
//ʹ����SPI �йص�ʱ��
_FLASH_SPI_APBxClock_FUN(_FLASH_SPI_CLK , ENABLE);
_FLASH_SPI_GPIO_APBxClock_FUN(_FLASH_SPI_GPIO_CLK , ENABLE);
//MISO MOSI SCK
GPIO_InitStructure.GPIO_Pin = _FLASH_SPI_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(_FLASH_SPI_SCL_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = _FLASH_SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(_FLASH_SPI_SCL_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = _FLASH_SPI_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(_FLASH_SPI_SCL_PORT,&GPIO_InitStructure);
//��ʼ��CSS����,ʹ����������,����ֱ������Ϊ�������
GPIO_InitStructure.GPIO_Pin = _FLASH_SPI_CSS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(_FLASH_SPI_SCL_PORT,&GPIO_InitStructure);
_FLASH_CSS_HIGH();
}
/**
* @brief static void SPI_Mode_Config(void) ����
* @param ��
* @retval ��
*/
static void SPI_Mode_Config(void){
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2 ; //������Ԥ��ƵֵΪ 2
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge ; //���ݲ����ڵڶ���ʱ����
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //ʱ�����ո�
SPI_InitStructure.SPI_CRCPolynomial = 0; //��ʹ��CRC����,��ֵ���д
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI ���ͽ��� 8 λ֡�ṹ
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex ; //˫��ȫ˫��
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //���ݴ���� MSB λ��ʼ
SPI_InitStructure.SPI_Mode = SPI_Mode_Master ; //������ SPI
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //�ڲ� NSS �ź��� SSI λ����
SPI_Init(_FLASH_SPIx , &SPI_InitStructure ); //д�����õ��Ĵ���
SPI_Cmd(_FLASH_SPIx , ENABLE); //ʹ��SPI
}
/**
* @brief void SPI_FLASH_Init(void) ��ʼ��
* @param ��
* @retval ��
*/
void SPI_FLASH_Init(void){
SPI_GPIO_Config();
SPI_Mode_Config();
}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// ͨѶ��������
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
/**
* @brief Basic management of the timeout situation.
* @param errorCode:�������,����������λ���ĸ����ڳ���.
* @retval ����0,��ʾSPI��ȡʧ��.
*/
static uint32_t SPI_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* Block communication and all processes */
FLASH_ERROR("SPI �ȴ���ʱ!errorCode = %d",errorCode);
return 0;
}
/**
* @brief uint8_t SPI_FLASH_Send_Byte(uint8_t data) ��ʼ��
* @param ���Ͳ��ҽ���һ���ֽ�
* @retval ��
*/
static uint8_t SPI_FLASH_Send_Byte(uint8_t data){
SPITimeout = FLASH_SPI_TIMEOUT;
//��鲢�ȴ���TX������
while(SPI_I2S_GetFlagStatus(_FLASH_SPIx,SPI_I2S_FLAG_TXE) == RESET){//���ͻ���ձ�־λ
if(SPITimeout--==0) {return SPI_TIMEOUT_UserCallback(0);}
}
//�жϳ����Ѿ�Ϊ��
SPI_I2S_SendData(_FLASH_SPIx , data);
//�жϽ��ܻ���ǿ�
SPITimeout = FLASH_SPI_TIMEOUT;
while(SPI_I2S_GetFlagStatus(_FLASH_SPIx,SPI_I2S_FLAG_RXNE) == RESET){//���ܻ���ǿձ�־λ��־λ
if(SPITimeout--==0) {return SPI_TIMEOUT_UserCallback(1);}
}
//���������.������Ҫ����һ���ֽ�
return SPI_I2S_ReceiveData(_FLASH_SPIx);
}
/**
* @brief uint8_t SPI_FLASH_Send_Byte(uint8_t data) ��ʼ��
* @param ���Ͳ��ҽ���һ���ֽ�
* @retval ��
*/
static uint8_t SPI_FLASH_SendHalf_Byte(uint16_t Halfdata){
SPITimeout = FLASH_SPI_TIMEOUT;
//��鲢�ȴ���TX������
while(SPI_I2S_GetFlagStatus(_FLASH_SPIx,SPI_I2S_FLAG_TXE) == RESET){//���ͻ���ձ�־λ
if(SPITimeout--==0) {return SPI_TIMEOUT_UserCallback(2);}
}
//�жϳ����Ѿ�Ϊ��
SPI_I2S_SendData(_FLASH_SPIx , Halfdata);
//�жϽ��ܻ���ǿ�
SPITimeout = FLASH_SPI_TIMEOUT;
while(SPI_I2S_GetFlagStatus(_FLASH_SPIx,SPI_I2S_FLAG_RXNE) == RESET){//���ܻ���ǿձ�־λ��־λ
if(SPITimeout--==0) {return SPI_TIMEOUT_UserCallback(3);}
}
//���������.������Ҫ����һ���ֽ�
return SPI_I2S_ReceiveData(_FLASH_SPIx);
}
/**
* @brief uint32_t SPI_Read_ID(void)
* @param ��ȡID��
* @retval
*/
uint32_t SPI_Read_ID(void){
uint32_t flash_id;
//Ƭѡʹ��
_FLASH_CSS_LOW();
SPI_FLASH_Send_Byte(FLASH_SPI_READ_JEDEC_ID);
flash_id = SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Memory typeID
flash_id<<=8;
flash_id|=SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Capcity typeID
flash_id<<=8;
flash_id|=SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Capcity typeID
_FLASH_CSS_HIGH();
return flash_id;
}
/**
* @brief uint32_t SPI_Read_ID(void)
* @param ��ȡID��
* @retval
*/
//uint32_t SPI_Read_DeviceID(void){
// uint32_t flash_id;
// //Ƭѡʹ��
// _FLASH_CSS_LOW();
// SPI_FLASH_Send_Byte(FLASH_SPI_READ_JEDEC_ID);
// SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Memory typeID
// SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Capcity typeID
// SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Capcity typeID
// flash_id = SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);//Capcity typeID
// _FLASH_CSS_HIGH();
// return flash_id;
//}
/**
* @brief void SPI_Write_Enable(void)
* @param д��ʹ��
* @retval
*/
static void SPI_Write_Enable(void){
//Ƭѡʹ��
_FLASH_CSS_LOW();
SPI_FLASH_Send_Byte(FLASH_SPI_WRITE_ENABLE);
_FLASH_CSS_HIGH();
}
/**
* @brief static void SPI_WaitForWriteEnd(void);
* @param //�ȴ�FLASH�ڲ�ʱ��������
* @retval
*/
static SPI_WaitForWriteEnd(void){
uint8_t status_reg = 0; //�ж����λS0 erse or write in progress
// Ƭѡָ��
_FLASH_CSS_LOW();
SPI_FLASH_Send_Byte(FLASH_SPI_READ_STATUS);
do{
status_reg = SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY); //��Ҫ��ȡ������Ҫ��������
}while((status_reg & 0x01)==1); //У�����λ����У��
_FLASH_CSS_HIGH();
}
/**
* @brief svoid SPI_Erase_Sector(uint32_t addr)
* @param ����FLASHָ������
* @retval
*/
void SPI_Erase_Sector(uint32_t addr){
SPI_Write_Enable();
/* �������� */
/* ѡ��FLASH: CS�͵�ƽ */
_FLASH_CSS_LOW();
/* ������������ָ��*/
SPI_FLASH_Send_Byte(FLASH_SPI_REASE_SECTOR);
/*���Ͳ���������ַ�ĸ�λ*/
SPI_FLASH_Send_Byte((addr & 0xFF0000) >> 16);
/* ���Ͳ���������ַ����λ */
SPI_FLASH_Send_Byte((addr & 0xFF00) >> 8);
/* ���Ͳ���������ַ�ĵ�λ */
SPI_FLASH_Send_Byte(addr & 0xFF);
/* ֹͣ�ź� FLASH: CS �ߵ�ƽ */
_FLASH_CSS_HIGH();
/* �ȴ��������*/
SPI_WaitForWriteEnd();
}
/**
* @brief ����FLASH����,��Ƭ����
* @param ��
* @retval ��
*/
void SPI_FLASH_BulkErase(void){
//����FLASH дʹ������
SPI_Write_Enable();
//����Erase
//ѡ��FLASH :CS �͵�ƽ
_FLASH_CSS_LOW();
SPI_FLASH_Send_Byte(FLASH_SPI_ChipErase);
/* ֹͣ�ź� FLASH: CS �ߵ�ƽ */
_FLASH_CSS_HIGH();
/* �ȴ��������*/
SPI_WaitForWriteEnd();
}
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
// �����
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
/**
* @brief void SPI_Read_Data(uint8_t *readBuffer , uint32_t addr ,uint32_t numByteToRead ));
* @param ��ȡFLASH������
* @retval
*/
void SPI_Read_Data(uint8_t *readBuffer , uint32_t addr ,uint16_t numByteToRead ){
//Ƭѡʹ��
_FLASH_CSS_LOW();
//���͵�ַ
/* ���� �� ָ�� */
SPI_FLASH_Send_Byte(FLASH_SPI_READ_DATA);
/* ���� �� ��ַ��λ */
SPI_FLASH_Send_Byte((addr>>16)&0xff);
/* ���� �� ��ַ��λ */
SPI_FLASH_Send_Byte((addr>>8)&0xff);
/* ���� �� ��ַ��λ */
SPI_FLASH_Send_Byte(addr&0xff);
// if(numByteToRead > SPI_PAGE_SIZE){
// numByteToRead = SPI_PAGE_SIZE;
// printf("SPI_FLASH_PageWrite too large!\n");
// }
/* ��ȡ���� */
while(numByteToRead--){
/* ��ȡһ���ֽ�*/
*readBuffer = SPI_FLASH_Send_Byte(FLASH_SPI_DUMMY);
/* ָ����һ���ֽڻ����� */
readBuffer++;
}
/* ֹͣ�ź� FLASH: CS �ߵ�ƽ */
_FLASH_CSS_HIGH();
}
/**
* @brief void SPI_Write_Data(uint8_t *readBuffer , uint32_t addr ,uint32_t numByteToRead ));
* @param ��ȡFLASH������
* @retval
*/
void SPI_Write_Data(uint8_t *writeBuffer , uint32_t addr ,uint16_t numByteToRead ){
SPI_Write_Enable();
//Ƭѡʹ��
_FLASH_CSS_LOW();
/* дҳдָ��*/
SPI_FLASH_Send_Byte(FLASH_SPI_WRITE_DATA);
/*����д��ַ�ĸ�λ*/
SPI_FLASH_Send_Byte((addr&0xff0000)>>16);
/*����д��ַ����λ*/
SPI_FLASH_Send_Byte((addr&0xff00)>>8);
/*����д��ַ�ĵ�λ*/
SPI_FLASH_Send_Byte(addr&0xff);
if(numByteToRead > SPI_PAGE_SIZE){
numByteToRead = SPI_PAGE_SIZE;
printf("SPI_FLASH_PageWrite too large!\n");
}
//�����
while(numByteToRead--){
//���͵�ǰҪд����ֽ�����
SPI_FLASH_Send_Byte(*writeBuffer);
//ָ�������ֽ�����
writeBuffer++;
}
/* ֹͣ�ź� FLASH: CS �ߵ�ƽ */
_FLASH_CSS_HIGH();
/* �ȴ�д�����*/
SPI_WaitForWriteEnd();
}
/**
* @brief SPI_Write_Data(uint8_t *writeBuffer , uint32_t addr ,uint32_t numByteToRead ){
* @param ��ȡFLASH������
* @retval
*/
void SPI_BufferWrite_Data(uint8_t *writeBuffer , uint32_t WriteAddr ,uint16_t numByteToWrite ){
uint32_t NumOfPage , NumOfSingle , BufferAddr ,count , temp;
if(numByteToWrite == 0){printf("SPI_FLASH_PageWrite too small!\n"); return;}
BufferAddr = WriteAddr % SPI_PAGE_Write_SIZE;
/*��ַ��Ӧҳ��ǰ����������*/
count = SPI_PAGE_Write_SIZE - BufferAddr;
/*��ǰҳʣ�µ�ȫ����ַ����*/
if(count >= numByteToWrite){
//ʣ�µ����ݿ���һ��д��
SPI_Write_Data(writeBuffer ,WriteAddr ,numByteToWrite );
return;
}
SPI_Write_Data(writeBuffer ,WriteAddr ,(uint16_t)count );//�ָ�д�뵥��ҳ��
temp = numByteToWrite - count ; //�ų����ಿ��
WriteAddr += count;
writeBuffer+=count;
NumOfPage = temp / SPI_PAGE_Write_SIZE ; //�Դ�����ָ�����
NumOfSingle = temp % SPI_PAGE_Write_SIZE ;
if(NumOfPage == 0){
SPI_Write_Data(writeBuffer ,WriteAddr ,(uint16_t)NumOfSingle );
return;
}else{
while(NumOfPage--){
SPI_Write_Data(writeBuffer ,WriteAddr ,SPI_PAGE_Write_SIZE );
WriteAddr += SPI_PAGE_Write_SIZE;
writeBuffer += SPI_PAGE_Write_SIZE;
}
SPI_Write_Data(writeBuffer ,WriteAddr ,(uint16_t)NumOfSingle );
return;
}
}
/**
* @brief void SPI_Show_Data(uint8_t *readBuffer);
* @param ��ȡFLASH������
* @retval
*/
void SPI_Show_Data(uint8_t *readBuffer , uint16_t numByteToRead){
uint32_t i;
for(i=0 ;i<numByteToRead ;i++ ){
if(i%SPI_PAGE_Write_SIZE == 0){ //ÿ��256�ֽڻ���
printf("\r\n ");
}
printf("0x%x ",readBuffer[i]);
}
}
(1) ʹ�� GPIO_InitTypeDef���� GPIO��ʼ���ṹ�����,�Ա��������ڴ洢 GPIO ����;
(2) ���ÿ⺯�� RCC_APB2PeriphClockCmd ��ʹ�� SPI ����ʹ�õ� GPIO �˿�ʱ�ӡ�
(3) �� GPIO ��ʼ���ṹ�帳ֵ,�� SCK/MOSI/MISO ���ų�ʼ���ɸ�������ģʽ���� CS(NSS)��������ʹ����������,���ǰ�������Ϊ��ͨ���������ģʽ��
(4) ʹ�����ϳ�ʼ���ṹ�������,���� GPIO_Init ������Ĵ���д�����,��� GPIO �� ��ʼ��
SPI_FLASH_SendByte ����ʵ����ǰ�潲��ġ�SPI ͨѶ���̡�: (1) �������в����� SPI ��ʼ��ֹͣ�ź�,ֻ���շ�����Ҫ����,�����ڵ��ñ����� ǰ��Ҫ������ʼ��ֹͣ�źŵIJ���;
(2) �� SPITimeout ������ֵΪ�� SPIT_FLAG_TIMEOUT����� SPITimeout �������� ��� while ѭ����ÿ��ѭ���� 1,��ѭ��ͨ�����ÿ⺯�� SPI_I2S_GetFlagStatus �� ���¼�,�����¼�,�����ͨѶ����һ��,��δ���¼���ͣ���ڴ˴� һֱ���,����� SPIT_FLAG_TIMEOUT �ζ���û�ȴ����¼�����ΪͨѶʧ��, ���õ� SPI_TIMEOUT_UserCallback ���������Ϣ,���˳�ͨѶ;
(3) ͨ����� TXE ��־,��ȡ���ͻ�������״̬,�����ͻ�����Ϊ��,���ʾ���ܴ� �ڵ���һ�������Ѿ��������;
(4) �ȴ������ͻ�����Ϊ�պ�,���ÿ⺯�� SPI_I2S_SendData ��Ҫ���͵����ݡ�byte�� д�뵽 SPI �����ݼĴ��� DR,д�� SPI ���ݼĴ��������ݻ�洢�����ͻ�����, �� SPI ���跢�ͳ�ȥ;
(5) д����Ϻ�ȴ� RXNE �¼�,�����ջ������ǿ��¼������� SPI ˫��ȫ˫��ģʽ �� MOSI �� MISO ���ݴ�����ͬ����(��Աȡ�SPI ͨѶ���̡��Ķ�),�����ջ��� ���ǿ�ʱ,��ʾ��������ݷ������,�ҽ��ջ�����Ҳ�յ��µ�����;
(6) �ȴ������ջ������ǿ�ʱ,ͨ�����ÿ⺯�� SPI_I2S_ReceiveData ��ȡ SPI ������ �Ĵ��� DR,�Ϳ��Ի�ȡ���ջ������е��������ˡ�������ʹ�ùؼ��֡�return�� �ѽ��յ������������Ϊ SPI_FLASH_SendByte �����ķ���ֵ,�������ǿ��Կ� �������涨��� SPI �������ݺ��� SPI_FLASH_ReadByte,��ֻ�Ǽص����� SPI_FLASH_SendByte �����������ݡ�Dummy_Byte��,Ȼ���ȡ�䷵��ֵ(��Ϊ ����ע���͵�����,���Դ�ʱ�����������Dummy_Byte������Ϊ����ֵ)������ ��������ԭ���� SPI �Ľ��չ��̺ͷ�����ʵ����һ����,�շ�ͬ������,�ؼ� �������ǵ��ϲ�Ӧ����,��ע���Ƿ��ͻ��ǽ��յ����ݡ�
����I2Cģ���� ͷ�ļ� I2C_soft_book.h
�������� :
#ifndef __I2C_SOFT_BOOK_H_
#define __I2C_SOFT_BOOK_H_
#include "stm32f10x.h"
//---------------- �����װ�� I2C ͨѶ������Ϣ -------------------
#define _Soft_I2C_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define _Soft_I2C_GPIO_CLK RCC_APB2Periph_GPIOB
#define _Soft_I2C_SCL_PORT GPIOB
#define _Soft_I2C_SCL_PIN GPIO_Pin_6
#define _Soft_I2C_SDA_PORT GPIOB
#define _Soft_I2C_SDA_PIN GPIO_Pin_7
#define _I2C_SCL_1() _Soft_I2C_SCL_PORT->BSRR = _Soft_I2C_SCL_PIN
#define _I2C_SCL_0() _Soft_I2C_SCL_PORT->BRR = _Soft_I2C_SCL_PIN
#define _I2C_SDA_1() _Soft_I2C_SCL_PORT->BSRR = _Soft_I2C_SDA_PIN
#define _I2C_SDA_0() _Soft_I2C_SCL_PORT->BRR = _Soft_I2C_SDA_PIN
#define _I2C_SDA_READ() ((_Soft_I2C_SCL_PORT->IDR & _Soft_I2C_SDA_PIN)!=0)
#define I2C_WR 0 /* ���bit */
#define I2C_RD 1 /* ������bit */
//----------------������ַ--------------------
/*
* AT24C02 2kb = 2048bit = 2048/8 B = 256 B
* 32 pages of 8 bytes each
*
* Device Address
* 1 0 1 0 A2 A1 A0 R/W
* 1 0 1 0 0 0 0 0 = 0XA0
* 1 0 1 0 0 0 0 1 = 0XA1
*/
/* EEPROM Addresses defines */
#define Soft_EEPROM_ADDRESS 0xA0 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA2 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA4 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA6 /* E2 = 0 */
/*��ȡ���ݵĸ�ʽ�Լ��ַ�����*/
#define _I2C_Soft_PageSize 8
#define _I2C_Soft_SIZE 256 /* 24xx02������ */
/*I2C �洢��ַ*/
#define EEP_Soft_Firstpage 0x90
void I2C_Soft_Init(void);
void EE_Soft_Trase(void);
uint8_t I2C_Soft_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite);
uint8_t I2C_Soft_Read_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite);
#endif
����I2Cģ���� ͷ�ļ� I2C_soft_book.c
�������� :
#include "I2C_soft_book.h"
#include "Systick_book.h"
static I2C_GPIO_Soft_Config(void){
GPIO_InitTypeDef GPIO_InitStructure;
_Soft_I2C_GPIO_APBxClock_FUN(_Soft_I2C_GPIO_CLK , ENABLE);
GPIO_InitStructure.GPIO_Pin = _Soft_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //��©���
GPIO_Init(_Soft_I2C_SCL_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = _Soft_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //��©���
GPIO_Init(_Soft_I2C_SDA_PORT,&GPIO_InitStructure);
}
/**
* @brief I2C_EE_Init �����ʼ��
* @param ��
* @retval ��
*/
static void I2C_Start(void){
// ��SCL�ߵ�ƽʱ��SDA ����һ���½��ر��λI2C ���������ź�
_I2C_SCL_1();
_I2C_SDA_1();
fn_Systick_Delay(50,_Systick_us);
_I2C_SDA_0();
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_0();
fn_Systick_Delay(50,_Systick_us);
}
/**
* @brief I2C_Stop �����ʼ��
* @param ��
* @retval ��
*/
static void I2C_Stop(void){
// ��SCL�ߵ�ƽ,SDA���������ر�ʾI2C����ֹͣ�ź�
_I2C_SDA_0();
_I2C_SCL_1();
fn_Systick_Delay(50,_Systick_us);
_I2C_SDA_1();
}
/**
* @brief I2C_SendByte �����ʼ��
* @param ��
* @retval ��
*/
static void I2C_SendByte(uint8_t _ucByte){
uint8_t i;
//�����ֽڵĸ�λ
for( i=0; i<8;i++ ){
if(_ucByte & 0x80){
_I2C_SDA_1();
}else{
_I2C_SDA_0();
}
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_1();
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_0();
_ucByte <<=1; //------ע�����ﲻ̫һ��
fn_Systick_Delay(50,_Systick_us);
}
_I2C_SDA_1();// �ͷ�����
}
/**
* @brief I2C_ReadByte �����ʼ��
* @param ��
* @retval ��
*/
static uint8_t I2C_ReadByte(void){
uint8_t i;
uint8_t value;
//������1��bit Ϊ���ݵ�bit7
value = 0;
for(i=0 ;i<8 ;i++ ){
value <<=1;
_I2C_SCL_1();
fn_Systick_Delay(50,_Systick_us);
if(_I2C_SDA_READ()){
value++;
}
_I2C_SCL_0();
fn_Systick_Delay(50,_Systick_us);
}
return value;
}
/**
* @brief I2C_WaitAck
* @param ��
* @retval ��
*/
static uint8_t I2C_WaitAck(void){
uint8_t re;
_I2C_SDA_1();
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_1();
fn_Systick_Delay(50,_Systick_us);
if(_I2C_SDA_READ()){
re = 1;
}else{
re = 0;
}
_I2C_SCL_0();
fn_Systick_Delay(50,_Systick_us);
return re;
}
/**
* @brief I2C_ACK
* @param ��
* @retval ��
*/
static void I2C_ACK(void){
_I2C_SDA_0(); //CPU ����SDA = 0;
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_1(); //CPU ����1��ʱ��
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_0();
fn_Systick_Delay(50,_Systick_us);
_I2C_SDA_1(); //CPU �ͷ�SDA����
}
/**
* @brief I2C_ACK
* @param ��
* @retval ��
*/
static void I2C_NACK(void){
_I2C_SDA_1(); //CPU ����SDA = 1;
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_1(); //CPU ����1��ʱ��
fn_Systick_Delay(50,_Systick_us);
_I2C_SCL_0();
fn_Systick_Delay(50,_Systick_us);
}
static uint8_t I2C_CheckDevice(uint8_t _Address){
uint8_t ucAck;
I2C_GPIO_Soft_Config();
I2C_Start();
I2C_SendByte(_Address | I2C_WR);
ucAck = I2C_WaitAck(); /* ����豸��ACKӦ�� */
I2C_Stop(); /* ����ֹͣ�ź� */
return ucAck;
}
//----------------------I2C �����--------------------
//------------------------------------------------------
/**
* @brief EE_Soft_Check_State
* @param �жϴ���EERPOM�Ƿ�����
* @retval ��
*/
static uint8_t EE_Soft_Check_State(void){
if(I2C_CheckDevice(Soft_EEPROM_ADDRESS)==0){return 1;}
else{I2C_Stop(); /* ����ֹͣ�ź� */ return 0;}
}
/**
* @brief uint8_t I2C_Soft_BufferRead(uint8_t* pBuffer,
* uint8_t ReadAddr, uint16_t NumByteToRead)
* @param �жϴ���EERPOM�Ƿ�����
* @retval ��
*/
static uint8_t I2C_Soft_BufferRead(uint8_t* pBuffer, uint8_t ReadAddr, uint16_t NumByteToRead){
uint16_t i ;
//����ȡ�����ɸ��ֽ�
// ����I2C���������ź�
I2C_Start();
//���Ϳ����ֽڵ�ַ�Ͷ�ȡ�����ź�
I2C_SendByte(Soft_EEPROM_ADDRESS | I2C_WR);
//�ȴ�Ӧ��״̬
if(I2C_WaitAck()!=0){printf("EEPROM ���� 1 !\r\n"); goto CMD_Fail;}
//�������ݶ�ȡλ����Ϣ�ź�
I2C_SendByte((uint8_t)ReadAddr);
//�ȴ�Ӧ��״̬
if(I2C_WaitAck()!=0){printf("EEPROM ���� 2 !\r\n");goto CMD_Fail;}
//--------------
//��������I2C����
I2C_Start();
//����������ַ
I2C_SendByte(Soft_EEPROM_ADDRESS| I2C_RD);
//�ȴ�Ӧ��״̬
if(I2C_WaitAck()!=0){printf("EEPROM ����3 !\r\n"); goto CMD_Fail;}
for(i=0 ;i<NumByteToRead ;i++ ){
pBuffer[i] = I2C_ReadByte();
if(i!=NumByteToRead-1){
I2C_ACK();
}else{
I2C_NACK();
}
}
I2C_Stop();
return 1;
CMD_Fail:
I2C_Stop();
return 0;
}
/**
* @brief uint8_t EE_Soft_WriteBytes(uint8_t* pBuffer,
* uint8_t ReadAddr, uint16_t NumByteToRead)
* @param �жϴ���EERPOM�Ƿ�����
* @retval ��
*/
static uint8_t EE_Soft_WriteBytes(uint8_t* pBuffer, uint8_t ReadAddr, uint16_t NumByteToRead){
uint16_t i , m;
uint16_t usAddr;
/*
д����EEPROM �������������������ȡ�ܶ��ֽ�ÿ��д����ֻ����ͬһ��page
����24C page size = 8
�Ĵ�������Ϊ ���ֽ�д����ģʽ,дһ���ֽڶ����͵�ַ
Ϊ���������д��Ч�� ����������Page write����
*/
usAddr = ReadAddr;
for(i=0 ;i<NumByteToRead;i++ ){
// �����͵�һ���ֽڻ���ҳ����ַʱ,��Ҫ���·��������źź͵�ַ
if((i==0)||(usAddr)&(_I2C_Soft_PageSize-1)==0){
// ����ֹͣ�ź�
I2C_Stop();
//ͨ��������ж��ڴ�д���Ƿ�ɹ�
m = 100;
for (m = 0; m < 100; m++){
//����I2C����
I2C_Start();
//����������ַ
I2C_SendByte(Soft_EEPROM_ADDRESS| I2C_WR);
//�ȴ�Ӧ��״̬
if(I2C_WaitAck()==0){break;}
}
if(m==100){printf("EEPROM ���� 4 !\r\n"); goto CMD_FAIL_bytes ; }
I2C_SendByte((uint8_t)usAddr);
if(I2C_WaitAck()!=0){printf("EEPROM ���� 5 !\r\n"); goto CMD_FAIL_bytes;}
}
// ��ʼд������
I2C_SendByte(pBuffer[i]);
//�ȴ�Ӧ��״̬
if(I2C_WaitAck()!=0){printf("EEPROM ���� 7 !\r\n"); goto CMD_FAIL_bytes;}
usAddr++;
}
// ����ֹͣ�ź�
I2C_Stop();
return 1;
CMD_FAIL_bytes:
// ����ֹͣ�ź�
I2C_Stop();
return 0;
}
/**
* @brief void EE_Soft_Trase(void)
* @param �жϴ���EERPOM�Ƿ�����
* @retval ��
*/
void EE_Soft_Trase(void){
uint16_t i ;
uint8_t buf[_I2C_Soft_SIZE]={0};
// ��仺����
for(i=0 ;i<_I2C_Soft_SIZE ;i++ ){
buf[i] = 0xFF;
}
//дEEPROM ��ʼ��ַ= 0 ���ݳ���Ϊ256
if(EE_Soft_WriteBytes(buf,0,_I2C_Soft_SIZE)==0){
printf("����EEPROM����!\r\n");
return;
}else{
printf("����EEPROM����!\r\n");
}
}
/**
* @brief void I2C_Soft_Init(void)
* @param
* @retval ��
*/
void I2C_Soft_Init(void){
if(EE_Soft_Check_State()==0){
/* û�м�EEPROM */
printf("û�м�����EEPROM!\r\n");
}
}
/**
* @brief void I2C_Soft_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite)
* @param �жϴ���EERPOM�Ƿ�����
* @retval ��
*/
uint8_t I2C_Soft_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
uint16_t i;
//-------------------------------
if(EE_Soft_Check_State()==0){
/* û�м�EEPROM */
printf("û�м�����EEPROM!\r\n");
return 1;
}
//------------�I2C-------------------
if(EE_Soft_WriteBytes(pBuffer,WriteAddr ,NumByteToWrite)==0){
/* û�м�EEPROM */
printf("дEEPROM����!\r\n");
return 1;
}else{
/* û�м�EEPROM */
printf("дEEPROM�ɹ�!\r\n");
}
fn_Systick_Delay(150,_Systick_us);
//--------------���ݼ��--------------
printf("EEPROMд�����ݼ����\r\n");
for(i=0 ;i<NumByteToWrite ;i++ ){
printf(" %d ",pBuffer[i]);
if((i & 15)==15){
printf("\r\n");
}
}
return 0;
}
uint8_t I2C_Soft_Read_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
uint16_t i;
//-------------��ȡI2C------------------
if(I2C_Soft_BufferRead(pBuffer,WriteAddr,NumByteToWrite)==0){
/* û�м�EEPROM */
printf("��EEPROM����!\r\n");
return 1;
}else{
/* û�м�EEPROM */
printf("\n��EEPROM�ɹ�!\r\n");
}
//--------------���ݼ��--------------
printf("EEPROM��ȡ�������ݼ�� \r\n");
for(i=0 ;i<NumByteToWrite ;i++ ){
printf(" %d ",pBuffer[i]);
if((i & 15)==15){
printf("\r\n");
}
}
return 1;
}
/*********************END OF FILE**********************/
����I2CӲ������� ͷ�ļ� I2C_book.h
�������� :
#ifndef __I2C_BOOK_H_
#define __I2C_BOOK_H_
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "USART_book.h"
//---------------- �����װ�� I2C ͨѶ������Ϣ -------------------
#define _EEPROM_I2Cx I2C1
#define _EEPROM_I2C_APBxClock_FUN RCC_APB1PeriphClockCmd
#define _EEPROM_I2C_CLK RCC_APB1Periph_I2C1
#define _EEPROM_I2C_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define _EEPROM_I2C_GPIO_CLK RCC_APB2Periph_GPIOB
#define _EEPROM_I2C_SCL_PORT GPIOB
#define _EEPROM_I2C_SCL_PIN GPIO_Pin_6
#define _EEPROM_I2C_SDA_PORT GPIOB
#define _EEPROM_I2C_SDA_PIN GPIO_Pin_7
/*STM32 I2C �ٶ�ģʽ */
#define _I2C_Speed 400000
/* I2C ������ַ */
#define _I2Cx_OWN_ADDRESS7 0x5f
/*��ȡ���ݵĸ�ʽ�Լ��ַ�����*/
#define _I2C_PageSize 8
/*I2C �洢��ַ*/
#define EEP_Firstpage 0x90
#define EEP_SIZE 0xFF
//----------------������ַ--------------------
/*
* AT24C02 2kb = 2048bit = 2048/8 B = 256 B
* 32 pages of 8 bytes each
*
* Device Address
* 1 0 1 0 A2 A1 A0 R/W
* 1 0 1 0 0 0 0 0 = 0XA0
* 1 0 1 0 0 0 0 1 = 0XA1
*/
/* EEPROM Addresses defines */
#define EEPROM_ADDRESS 0xA0 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA2 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA4 /* E2 = 0 */
//#define EEPROM_ADDRESS 0xA6 /* E2 = 0 */
//----------------��������--------------------
//I2C Ӧ�ú���
void _I2C_EE_Init(void);
void I2C_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite);
void I2C_Read_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite);
#endif
����I2CӲ������� ͷ�ļ� I2C_book.c
�������� :
#include "I2C_book.h"
#include "Systick_book.h"
/**
* @brief I2C_EE_Init �����ʼ��
* @param ��
* @retval ��
*/
static void I2C_GPIO_Config(void){
GPIO_InitTypeDef GPIO_InitStructure;
// ��ʼ�� I2C ���ʱ��
_EEPROM_I2C_APBxClock_FUN(_EEPROM_I2C_CLK,ENABLE);
_EEPROM_I2C_GPIO_APBxClock_FUN(_EEPROM_I2C_GPIO_CLK,ENABLE);
// ��ʼ��I2C_SCL SDA
GPIO_InitStructure.GPIO_Pin = _EEPROM_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; //��©���
GPIO_Init(_EEPROM_I2C_SCL_PORT,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = _EEPROM_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; //��©���
GPIO_Init(_EEPROM_I2C_SDA_PORT,&GPIO_InitStructure);
}
/**
* @brief I2C_EE_Init �����ʼ��
* @param ��
* @retval ��
*/
static void I2C_Mode_Config(void){
I2C_InitTypeDef I2C_InitStructure;
/* i2C ���� */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
// �ߵ�ƽ�����ȶ�,�͵�ƽ���ݱ仯 SCL ʱ���ߵ�ռ�ձ�
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = _I2Cx_OWN_ADDRESS7;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
//I2C Ѱַģʽ
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
//ͨѶƵ��
I2C_InitStructure.I2C_ClockSpeed = _I2C_Speed;
//I2C ��ʼ��
I2C_Init(_EEPROM_I2Cx,&I2C_InitStructure);
//ʹ��I2C
I2C_Cmd(_EEPROM_I2Cx,ENABLE);
}
/**************************************/
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode){
fn_Usart_SendString(_DEBUG_USARTx,"I2C �ȴ���ʱ!errorCode =");
printf("%d\n",errorCode);
return 0;
}
/**************************************/
/*ͨѶ�ȴ���ʱʱ��*/
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x6000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10*I2CT_FLAG_TIMEOUT))
static uint16_t I2CTimeout;
/**************************************/
/**
* @brief дһ���ֽڵ� I2C EEPROM ��
* @param pBuffer:������ָ��
* @param WriteAddr:д��ַ
* @retval �������� 1,�쳣���� 0
*/
static uint32_t I2C_EE_ByteWrite(u8* pBuffer, uint8_t WriteAddr ){
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_GetFlagStatus(_EEPROM_I2Cx , ENABLE)){
if((I2CTimeout--) == 0){return I2C_TIMEOUT_UserCallback(4);}
}
//����I2C��ʼ�ź�
I2C_GenerateSTART(_EEPROM_I2Cx , ENABLE);
I2CTimeout = I2CT_LONG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV5 �¼��������ʶλ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(5);}
}
//����EEPROM �豸��ַ
I2C_Send7bitAddress(_EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter);
I2CTimeout = I2CT_LONG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV6 �¼��������ʶλ
while(I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(6);}
}
//����Ҫд���EEPROM �ڲ���ַ(��EEPROM�ڲ��洢���ַ);
I2C_SendData(_EEPROM_I2Cx,WriteAddr);
I2CTimeout = I2CT_LONG_TIMEOUT;
//���EV8 �¼������־λ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTED)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(2);}
}
//����Ҫд���EEPROM �ڲ�������;
I2C_SendData(_EEPROM_I2Cx,*pBuffer);
I2CTimeout = I2CT_LONG_TIMEOUT;
//���EV8 �¼������־λ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTED)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(3);}
}
//����Ҫд���EEPROM �ڲ�������;
I2C_SendData(_EEPROM_I2Cx,ENABLE);
return 1;
}
/**
* @brief ���������е�����д�� I2C EEPROM ��,���õ��ֽ�д��ķ�ʽ,�ٶȱ�ҳд����
* @param pBuffer:������ָ��
* @param WriteAddr:д��ַ
* @param NumByteToWrite:д���ֽ���
*/
static void I2C_EE_WaitEepromStandbyState(void){
vu16 SR1_Tmp = 0;
do{
//����I2C��ʼ�ź�
I2C_GenerateSTART(_EEPROM_I2Cx,ENABLE);
//��ȡI2C1 SR1 �Ĵ���
SR1_Tmp = I2C_ReadRegister(_EEPROM_I2Cx, I2C_Register_SR1);
//����EEPROM ��ַ+ ����
I2C_Send7bitAddress(_EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter);
}while(!(I2C_ReadRegister(_EEPROM_I2Cx, I2C_Register_SR1) & 0x0002));
/* ��� AF λ */
I2C_ClearFlag(_EEPROM_I2Cx, I2C_FLAG_AF);
//����ֹͣλ�ź�
I2C_GenerateSTOP(_EEPROM_I2Cx , ENABLE);
}
//zuozuo04-30
/**
* @brief �� EEPROM ��һ��дѭ���п���д����ֽ�,��һ��д����ֽ���
* ���ܳ��� EEPROM ҳ�Ĵ�С,AT24C02 ÿҳ�� 8 ���ֽ�
* @param
* @param pBuffer:������ָ��
* @param WriteAddr:д��ַ
* @param NumByteToWrite:Ҫд���ֽ���Ҫ�� NumByToWrite С��ҳ��С
* @retval �������� 1,�쳣���� 0
*/
static uint8_t I2C_EE_PageWrite(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_GetFlagStatus(_EEPROM_I2Cx , ENABLE)){
if((I2CTimeout--) == 0){return I2C_TIMEOUT_UserCallback(4);}
}
//����I2C��ʼ�ź�
I2C_GenerateSTART(_EEPROM_I2Cx , ENABLE);
I2CTimeout = I2CT_LONG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV5 �¼��������ʶλ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_MODE_SELECT)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(5);}
}
//����EEPROM �豸��ַ
I2C_Send7bitAddress(_EEPROM_I2Cx,EEPROM_ADDRESS,I2C_Direction_Transmitter);
I2CTimeout = I2CT_LONG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV6 �¼��������ʶλ
while(I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(6);}
}
//����Ҫд���EEPROM�ڲ���ַ(EEPROM�ڲ��洢����ַ)
I2C_SendData(_EEPROM_I2Cx,WriteAddr);
I2CTimeout = I2CT_LONG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV7 �¼��������ʶλ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTING)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(7);}
}
//ѭ������ NumByteToWrite������
while(NumByteToWrite--){
//���ͻ�����������
I2C_SendData(_EEPROM_I2Cx,*pBuffer++);
I2CTimeout = I2CT_FLAG_TIMEOUT; //�����������ʱ�쳣ʱ��
//���EV8 �¼��������ʶλ
while(!I2C_CheckEvent(_EEPROM_I2Cx,I2C_EVENT_MASTER_BYTE_TRANSMITTED)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(8);}
}
}
//����ֹͣ�ź�
I2C_GenerateSTOP(_EEPROM_I2Cx,ENABLE);
return 1;
}
/** ����д��һҳ
* @brief �������������� I2C EEPROM ��
* @param
* @arg pBuffer:������ָ��
* @arg WriteAddr:д��ַ
* @arg NumByteToWrite:д���ֽ���
* @retval ��
*/
#define I2C_PageSize 8 //AT24C01 02 ÿҳ��8���ֽ�
static void I2C_EE_BufferWrite(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
u8 NumOfPage = 0, NumOfSingle = 0 , Addr = 0 , count = 0,temp = 0;
//Mod ��������,���writeAddr �� I2C_PageSize ���鱶,������λAddrΪ0
Addr = WriteAddr % I2C_PageSize;
//��count����ֵ,�պÿ��Զ��뵽ҳ���ַ
count = I2C_PageSize - Addr;
//�����Ҫд��������ҳ
NumOfPage = NumByteToWrite / I2C_PageSize;
//mod����������������һҳ���ֽ���
NumOfSingle = NumByteToWrite % I2C_PageSize;
// Addr = 0,��WriteAddr �պð�ҳ����aligned
// �����ͺܼ���,ֱ��д�Ϳ���д����ҳ��
// ��ʣ�µIJ���һҳ��д�꼴��
if(Addr == 0){
//��� NumByteToWrite < I2C_PageSize
if(NumOfPage==0){
I2C_EE_PageWrite(pBuffer , WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}//���NumByteToWrite > I2C_PageSize
else{
//�Ȱ�����ҳд��
while(NumOfPage--){
I2C_EE_PageWrite(pBuffer , WriteAddr, I2C_PageSize);
I2C_EE_WaitEepromStandbyState();
WriteAddr += I2C_PageSize ;
pBuffer += I2C_PageSize ;
}
//���ж���IJ���һҳ������,����д��
if(NumOfSingle != 0){
I2C_EE_PageWrite(pBuffer , WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
}
}
//��� WriteAddr ���ǰ� I2C_PageSize ����
//�Ǿ�������뵽ҳ��ַ����Ҫ��������,Ȼ���Ȱ��⼸������д��,ʣ�¿�ʼ�ĵ�ַ���Ѿ�����
//��ҳ��ַ��,�����ظ�����ļ���
else{
//���NumByteToWrite < I2C_PageSize
if(NumOfPage == 0){
//��NumOfSingle > count,��ǰ��д����,Ҫд��һҳ
if(NumOfSingle > count){
temp = NumOfSingle - count;
I2C_EE_PageWrite(pBuffer , WriteAddr, count);
I2C_EE_WaitEepromStandbyState();
WriteAddr += count ;
pBuffer += count ;
I2C_EE_PageWrite(pBuffer , WriteAddr, temp);
I2C_EE_WaitEepromStandbyState();
}else{//��count �� NumOfSingle��
I2C_EE_PageWrite(pBuffer , WriteAddr, NumByteToWrite);
I2C_EE_WaitEepromStandbyState();
}
}
//��� NumByteToWrite > I2C_PageSize
else{
//��ַ����������Count �ֿ�����,�������������
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize ;
NumOfSingle = NumByteToWrite % I2C_PageSize;
//�Ȱ� WriteAddr ����ҳ��ʣ���ֽ�д��
if(count!=0){
I2C_EE_PageWrite(pBuffer , WriteAddr, count);
I2C_EE_WaitEepromStandbyState();
//���� count ��,��ַ�Ͷ��뵽ҳ��
WriteAddr += count ;
pBuffer += count ;
}
//����ҳ��д��
while(NumOfPage--){
I2C_EE_PageWrite(pBuffer , WriteAddr, I2C_PageSize);
I2C_EE_WaitEepromStandbyState();
WriteAddr += I2C_PageSize ;
pBuffer += I2C_PageSize ;
}
//������IJ�����һҳ,�Ͱ���д��
if(NumOfSingle !=0){
I2C_EE_PageWrite(pBuffer , WriteAddr, NumOfSingle);
I2C_EE_WaitEepromStandbyState();
}
}
}
}
/* EEPROM ��ȡ
* @brief �� EEPROM �����ȡһ������
* @param pBuffer:��Ŵ� EEPROM ��ȡ�����ݵĻ�����ָ��
* @param ReadAddr:�������ݵ� EEPROM �ĵ�ַ
* @param NumByteToRead:Ҫ�� EEPROM ��ȡ���ֽ���
* @retval �������� 1,�쳣���� 0
*/
static uint8_t I2C_EE_BufferRead(uint8_t* pBuffer, uint8_t ReadAddr, uint16_t NumByteToRead){
I2CTimeout = I2CT_LONG_TIMEOUT ;
while(I2C_GetFlagStatus(_EEPROM_I2Cx , I2C_FLAG_BUSY)){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(9);}
}
//����I2C��ʼ�ź�
I2C_GenerateSTART(_EEPROM_I2Cx , ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
//���EV10 �¼��������ע
while(! I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_MODE_SELECT)){
if((I2CTimeout--)==0){ return I2C_TIMEOUT_UserCallback(10);}
}
//����EEPROM �豸��ַ
I2C_Send7bitAddress(_EEPROM_I2Cx , EEPROM_ADDRESS , I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
//���EV11 �¼������
while(! I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)){
if((I2CTimeout--)==0){ return I2C_TIMEOUT_UserCallback(11);}
}
//ͨ����������PEλ���EV12�¼�
I2C_Cmd(_EEPROM_I2Cx ,ENABLE );
//����Ҫ��ȡ��EEPROM�ڲ���ַ(��EEPROM�ڲ��洢����ַ)
I2C_SendData(_EEPROM_I2Cx, ReadAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT ;
//���EV12 �¼������
while(! I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_BYTE_TRANSMITTED)){
if((I2CTimeout--)==0){ return I2C_TIMEOUT_UserCallback(12);}
}
//�����ڶ���I2C��ʼ�ź�
I2C_GenerateSTART(_EEPROM_I2Cx , ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
//���EV13 �¼������
while(! I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_MODE_SELECT)){
if((I2CTimeout--)==0){ return I2C_TIMEOUT_UserCallback(13);}
}
//����EEPROM �豸��ַ
I2C_Send7bitAddress(_EEPROM_I2Cx , EEPROM_ADDRESS , I2C_Direction_Receiver);
I2CTimeout = I2CT_FLAG_TIMEOUT;
//���EV14 �¼������
while(! I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)){
if((I2CTimeout--)==0){ return I2C_TIMEOUT_UserCallback(14);}
}
//��ȡNumByteToRead������
while(NumByteToRead){
//��� NumByteToRead=1,��ʾ�Ѿ��յ����һ��������
//����Ӧ���źŽ������
if(NumByteToRead == 1){
//���ͷ�Ӧ���ź�
I2C_AcknowledgeConfig(_EEPROM_I2Cx , DISABLE);
}
I2CTimeout = I2CT_LONG_TIMEOUT;
while(I2C_CheckEvent(_EEPROM_I2Cx , I2C_EVENT_MASTER_BYTE_RECEIVED)==0){
if((I2CTimeout--)==0){return I2C_TIMEOUT_UserCallback(3);}
}
//ͨ��I2C,���豸�ж�ȡһ���ֽڵ�����
*pBuffer = I2C_ReceiveData(_EEPROM_I2Cx);
//�洢���ݵ�ָ��ָ���µ�ַ
pBuffer++;
//���������Լ�
NumByteToRead--;
}
//����ֹͣ�ź�
I2C_GenerateSTOP(_EEPROM_I2Cx , ENABLE);
//ʹ�ܴ�Ӧ,����һ��I2C���
I2C_AcknowledgeConfig(_EEPROM_I2Cx , ENABLE);
return 1;
}
//--------------------------------------------------------
/**
* @brief void _I2C_EE_Init(void)
* @param ��
* @retval �������� 1 ,���������� 0
*/
void _I2C_EE_Init(void){
I2C_GPIO_Config();
I2C_Mode_Config();
}
/**
* @brief I2C_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite)
* @param ��
* @retval �������� 1 ,���������� 0
*/
void I2C_Write_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
u16 i;
printf("I2C_����� \n");
I2C_EE_WaitEepromStandbyState();
I2C_EE_PageWrite(pBuffer,WriteAddr, NumByteToWrite);
for(i=0 ;i<NumByteToWrite ;i++ ){
printf("%d ", *pBuffer++);
if(i%16 == 15)
printf("\n\r");
}
printf("\nI2C_�������� \n");
I2C_EE_WaitEepromStandbyState();
for(i=0 ;i<NumByteToWrite ;i++ ){
printf("%d ", pBuffer[i]);
if(i%16 == 15)
printf("\n\r");
}
}
/**
* @brief I2C(void I2C_Read_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite))�����
* @param ��
* @retval EEP_SIZE
*/
void I2C_Read_fun(uint8_t* pBuffer, uint8_t WriteAddr, uint16_t NumByteToWrite){
u16 i;
printf("I2C_���ݼ�� \n");
I2C_EE_BufferRead(pBuffer,WriteAddr,NumByteToWrite);
printf("\nI2C_���ݶ�ȡ��� \n");
for(i=0 ;i<NumByteToWrite ;i++ ){
printf("%d ", pBuffer[i]);
if(i%16 == 15)
printf("\n\r");
}
printf("\n--->I2C_���ݼ�����\n");
}
����USART����� ͷ�ļ� USART_book.h
�������� :
#ifndef __USART_BOOK_H_
#define __USART_BOOK_H_
#include "stm32f10x.h"
#include <stdio.h>
#include "stm32f10x_usart.h"
#include "stm32f10x_rcc.h"
//���ڵĺ궨�� ��ͬ�Ĵ��ڹ��ڵ����ߺ�IO��һ��
//����1
#define _DEBUG_USARTx USART1
#define _DEBUG_USART_CLK RCC_APB2Periph_USART1
#define _DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define _DEBUG_USART_BAUDRATE 115200
// USART GPIO ���Ŷ���
#define _DEBUG_USART_GPIO_CLK RCC_APB2Periph_GPIOA
#define _DEBUG_USART_GPIO_APBxCLKCmd RCC_APB2PeriphClockCmd
#define _DEBUG_USART_TX_GPIO_PORT GPIOA
#define _DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define _DEBUG_USART_TX_GPIO_MODE GPIO_Mode_AF_PP
#define _DEBUG_USART_RX_GPIO_PORT GPIOA
#define _DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define _DEBUG_USART_RX_GPIO_MODE GPIO_Mode_IN_FLOATING
#define _DEBUG_NVIC_USART_IRQ USART1_IRQn
#define _DRBUG_USART_IRQHandler USART1_IRQHandler
void fn_USART_IO_Config(void);
void fn_USART_Config(void);
void fn_USART_Init(void);
void fn_Usart_Send_Byte(USART_TypeDef * pUSARTx , uint8_t ch );
void fn_Usart_SendString(USART_TypeDef *pUSARTx , char * str);
void Usart_SendHalf_32_Word( USART_TypeDef * pUSARTx, uint32_t ch);
int fputc (int ch , FILE *f);
int fgetc(FILE *f);
void _DRBUG_USART_IRQHandler(void);
#endif
����USART�����C�ļ� USART_book.c
�������� :
#include "USART_book.h"
/**************************************************************
* @brief
* void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x ,
* LED_Corporate_state_t _LED_Corporate_state_t );
* @param
* //����1
* #define _DEBUG_NVIC_USART_IRQ USART1_IRQn
* #define _DRBUG_NVIC_USART_IRQHandler USART1_IRQHandler
* @retval
*************************************************************/
static void NVIC_Configuration(void){
NVIC_InitTypeDef NVIC_InitStructure;
/* Ƕ�������жϿ��ƼĴ�����ѡ��*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* ���� USART Ϊ�ж�Դ */
NVIC_InitStructure.NVIC_IRQChannel = _DEBUG_NVIC_USART_IRQ;
/* �������ȼ�Ϊ 1 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* �����ȼ�Ϊ 1 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* ʹ���ж� */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* ��ʼ������ NVIC */
NVIC_Init(&NVIC_InitStructure);
}
/**************************************************************
* @brief
* void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x ,
* LED_Corporate_state_t _LED_Corporate_state_t );
* @param
* //����1
* // USART GPIO ���Ŷ���
* #define _DEBUG_USART_GPIO_CLK RCC_APB2Periph_GPIOA
* #define _DEBUG_USART_GPIO_APBxCLKCmd RCC_APB2PeriphClockCmd
*
* #define _DEBUG_USART_TX_GPIO_PORT GPIOA
* #define _DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
* #define _DEBUG_USART_TX_GPIO_MODE GPIO_Mode_AF_PP
* #define _DEBUG_USART_RX_GPIO_PORT GPIOA
* #define _DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
* #define _DEBUG_USART_RX_GPIO_MODE GPIO_Mode_AF_FLOATING
* @retval
*************************************************************/
void fn_USART_IO_Config(void){
GPIO_InitTypeDef GPIO_InitStructure;
// ���� GPIO ��ʱ��
_DEBUG_USART_GPIO_APBxCLKCmd(_DEBUG_USART_GPIO_CLK , ENABLE);
//��USART TX ��GPIO����Ϊ����ģʽ
GPIO_InitStructure.GPIO_Pin = _DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = _DEBUG_USART_TX_GPIO_MODE;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(_DEBUG_USART_TX_GPIO_PORT,&GPIO_InitStructure);
//��USART RX ��GPIO������������
GPIO_InitStructure.GPIO_Pin = _DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = _DEBUG_USART_RX_GPIO_MODE;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(_DEBUG_USART_RX_GPIO_PORT,&GPIO_InitStructure);
}
/**************************************************************
* @brief
* void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x ,
* LED_Corporate_state_t _LED_Corporate_state_t );
* @param
* //����1
* #define _DEBUG_USARTx USART1
* #define _DEBUG_USART_CLK RCC_APB2Periph_USART1
* #define _DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
* #define _DEBUG_USART_BAUDRATE 115200
* @retval
*************************************************************/
void fn_USART_Config(void){
USART_InitTypeDef USART_InitStructure;
// ���������ʱ��
_DEBUG_USART_APBxClkCmd(_DEBUG_USART_CLK , ENABLE);
//���ô��ڵĹ�������
USART_InitStructure.USART_BaudRate = _DEBUG_USART_BAUDRATE;
//������
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// ���� �������ֳ�
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// ����ֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;
// ����У��λ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// ����Ӳ��������
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx ;
// ���ù���ģʽ,�շ�һ��
USART_Init(_DEBUG_USARTx , &USART_InitStructure);// ��ɴ��ڵij�ʼ������
NVIC_Configuration();// �����ж����ȼ�����
USART_ITConfig(_DEBUG_USARTx , USART_IT_RXNE , ENABLE);// ʹ�ܴ��ڽ����ж�
USART_Cmd(_DEBUG_USARTx , ENABLE);// ʹ�ܴ���
}
/**************************************************************
* @brief
* void fn_Usart_Send_Byte(USART_TypeDef * pUSARTx , uint8_t ch );
* @param
* //����1
* #define _DEBUG_USARTx USART1
* #define _DEBUG_USART_CLK RCC_APB2Periph_USART1
* #define _DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
* #define _DEBUG_USART_BAUDRATE 115200
* @retval
*************************************************************/
void fn_Usart_Send_Byte(USART_TypeDef * pUSARTx , uint8_t ch ){
/*����һ���ֽ����ݵ�USART*/
USART_SendData(pUSARTx , ch);
/*�ȴ��������ݼĴ���Ϊ��*/
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TXE)==RESET);
}
/**************************************************************
* @brief
* void fn_Usart_SendString(USART_TypeDef *pUSARTx , char * str);
* @param
* //����1
* #define _DEBUG_USARTx USART1
* #define _DEBUG_USART_CLK RCC_APB2Periph_USART1
* #define _DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
* #define _DEBUG_USART_BAUDRATE 115200
* @retval
*************************************************************/
void fn_Usart_SendString(USART_TypeDef *pUSARTx , char * str){
unsigned int k = 0;
do{
fn_Usart_Send_Byte(pUSARTx,*(str + k++));
}while(*(str + k)!='\0');
/*�ȴ��������*/
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC));
}
/**************************************************************
* @brief
* void Usart_SendHalf_32_Word( USART_TypeDef * pUSARTx, uint32_t ch);
* @param
* @retval
*************************************************************/
void Usart_SendHalf_32_Word( USART_TypeDef * pUSARTx, uint32_t ch){
uint32_t temp_Half32;
uint8_t temp_Half=0,i_Half=4;
temp_Half32 =ch;
while(i_Half-->0){
temp_Half=(temp_Half32 & 0xFF000000)>>24;
temp_Half32<<=8;
fn_Usart_Send_Byte(pUSARTx,temp_Half);
}
/*�ȴ��������*/
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC));
}
/**************************************************************
* @brief
* void fn_USART_Init(void);
* @param
* @retval
*************************************************************/
void fn_USART_Init(void){
fn_USART_IO_Config();
fn_USART_Config();
}
//���� MDK �Ĺ���ѡ��ѡ�Use MicroLIB����ѡ��,MicoroLIB ��ȱʡ C ��ı�ѡ��,����
//�� C ������˸߶��Ż�ʹ�������,ռ�ø�����Դ��
/**************************************************************
* @brief
* int fputc (int ch , FILE *f)
* @param ���¶���C�⺯��Printf ��USART1
* @retval
*************************************************************/
int fputc (int ch , FILE *f){
/*����һ���ֽ����ݵ�USART*/
USART_SendData(_DEBUG_USARTx , (uint8_t)ch);
/*�ȴ��������ݼĴ���Ϊ��*/
while(USART_GetFlagStatus(_DEBUG_USARTx,USART_FLAG_TXE)==RESET);
return (ch);
}
/**************************************************************
* @brief
* int fgetc(FILE *f);
* @param ���¶���C�⺯��Printf ��USART1
* @retval
*************************************************************/
int fgetc(FILE *f){
//�ȴ�����1��������
while(USART_GetITStatus(_DEBUG_USARTx,USART_IT_RXNE)==RESET);
return (int)USART_ReceiveData(_DEBUG_USARTx);
}
/**************************************************************
* @brief
* void USART1_IRQHandler(void); �жϷ���
* @param
* @retval
*************************************************************/
void _DRBUG_USART_IRQHandler(void){
uint8_t ucTemp = 0;
if(USART_GetITStatus(_DEBUG_USARTx,USART_IT_RXNE)!=RESET){
ucTemp = USART_ReceiveData(_DEBUG_USARTx);
USART_SendData(_DEBUG_USARTx ,ucTemp );
}
}
����DMA����� ͷ�ļ� DMA_book.h
�������� :
#ifndef __DMA_BOOK_H_
#define __DMA_BOOK_H_
#include "stm32f10x.h"
#define DMA_CLOCK RCC_AHBPeriph_DMA1 //DMA ʱ��
/****** A ****************** ROM �� RAM ��DMA��� *******************************/
#define Map_DMA_CHANNEL DMA1_Channel6 // ��ʹ�ô洢�����洢��ģʽʱ��,ͨ���������ѡ,û��Ӳ�ԵĹ涨
#define Map_BUFFER_SIZE 20 // Ҫ���͵����ݴ�С
#define DMA_FLAG_TC DMA1_FLAG_TC6 // ������ɱ�־
/* ���� aSRC_Const_Buffer ������Ϊ DMA ��������Դ
* const �ؼ��ֽ� aSRC_Const_Buffer �����������Ϊ��������
* ��ʾ���ݴ洢���ڲ��� FLASH ��*/
extern const uint32_t aSRC_Cont_Buffer[Map_BUFFER_SIZE] ;
/* ���� DMA ����Ŀ��洢���洢���ڲ��� SRAM ��*/
extern uint32_t aDST_Buffer[Map_BUFFER_SIZE];
/*************************************************************************************/
/******** B **************** USART �� RAM ��DMA��� *******************************/
#define USART_DMA_CHANNEL DMA1_Channel4 //���ڶ�Ӧ�� DMA ����ͨ��
#define USART_Source_ADDR (USART1_BASE+0x04) //�������ݵĵ�ַ
extern uint32_t USART_BUFFER_SIZE ; // Ҫ���͵����ݴ�С
extern uint32_t* USART_DMA_Buffer ;
/************************************************************************************/
void _DMA_Config(DMA_Channel_TypeDef* _DMAy_Channelx , uint32_t _BUFFER_SIZE , uint32_t _DMA_OutSource_ADDR, uint32_t _DMA_InSource_ADDR , uint32_t _DMA_DIR);
void _USART_DMA_Config(DMA_Channel_TypeDef* _DMAy_Channelx , uint32_t _BUFFER_SIZE , uint32_t _DMA_OutSource_ADDR, uint32_t _DMA_InSource_ADDR , uint32_t _DMA_DIR);
uint8_t _Buffercmp(const uint32_t *pBuffer, uint32_t * pBuffer1 , uint16_t BufferLength);
void _Buffer_Show(uint32_t * pBuffer , uint16_t BufferLength);
//DMA���ڴ�ROM���ݵ�ȡ��
void _DMA_ROM_TO_RAM(uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR );
//DMA��RAM��USART���ݵ�ȡ��
void _DMA_RAM_TO_USART(uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR );
#define _Map_DMA_Config_ _DMA_Config(Map_DMA_CHANNEL ,Map_BUFFER_SIZE ,aSRC_Cont_Buffer , aDST_Buffer , DMA_DIR_PeripheralSRC)
// ROM �� RAM ��DMA��� �ij����ʼ�� DMA_DIR_PeripheralSRC:Ϊ�������赽�ڴ�
#define _USART_DMA_Config_ _USART_DMA_Config(USART_DMA_CHANNEL ,USART_BUFFER_SIZE ,USART_Source_ADDR , USART_DMA_Buffer , DMA_DIR_PeripheralDST)
// ROM �� RAM ��DMA��� �ij����ʼ�� DMA_DIR_PeripheralDST:Ϊ�������赽�ڴ�
#define _DMA_InnerChange_ _Buffercmp(aSRC_Cont_Buffer , aDST_Buffer, Map_BUFFER_SIZE)
// ROM �� RAM ��DMA��� ��������֤
#define _RMA_InnerShow_ _Buffer_Show(aDST_Buffer, Map_BUFFER_SIZE)
#endif
����DMA�����C�ļ� DMA_book.c
�������� :
#include "DMA_book.h"
#include "USART_book.h"
#include "Systick_book.h"
const uint32_t aSRC_Cont_Buffer [Map_BUFFER_SIZE]={
'W','E','L','L',
'C','O','M','E',
' ','S','T','M',
'3','2',' ','S',
'T','U','D','Y',
};
uint32_t aDST_Buffer[Map_BUFFER_SIZE] ;
uint32_t* USART_DMA_Buffer ;
uint32_t USART_BUFFER_SIZE ;
void _DMA_Config(DMA_Channel_TypeDef* _DMAy_Channelx , uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR , uint32_t _DMA_DIR){
DMA_InitTypeDef DMA_InitStructure ;
//����DMAʱ��
RCC_AHBPeriphClockCmd(DMA_CLOCK,ENABLE);
//Դ���ݻ����ַ(�����ַ)
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)_DMA_Source_ADDR ;
//ת�������ַ��ַ(�ڴ��ַ)
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)_DMA_AIM_ADDR;
//����:���赽�洢��(������������ڲ���FLASH)DMA_DIR_PeripheralSRC:Ϊ�������赽�ڴ� DMA_DIR_PeripheralDST:Ϊ�������赽�ڴ�
DMA_InitStructure.DMA_DIR = _DMA_DIR ;
//�����С
DMA_InitStructure.DMA_BufferSize = _BUFFER_SIZE;
//����(�ڲ���FLASH)��ַ����
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Enable;
//�ڴ��ַ����
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
//�������ݵ�λ
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
//�ڴ����ݵ�λ
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;
//DMAģʽ,һ�λ���ѭ��ģʽ
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
//DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
//���ȼ�:��
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
//ʹ���ڴ浽�ڴ�Ĵ���
DMA_InitStructure.DMA_M2M = DMA_M2M_Enable;
//����DMAͨ��
DMA_Init(_DMAy_Channelx , &DMA_InitStructure);
//ʹ��DMA
DMA_Cmd(_DMAy_Channelx , ENABLE);
}
void _USART_DMA_Config(DMA_Channel_TypeDef* _DMAy_Channelx , uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR , uint32_t _DMA_DIR){
DMA_InitTypeDef DMA_InitStructure ;
//����DMAʱ��
RCC_AHBPeriphClockCmd(DMA_CLOCK,ENABLE);
//Դ���ݻ����ַ(�����ַ)
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)_DMA_Source_ADDR ;
//ת�������ַ��ַ(�ڴ��ַ)
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)_DMA_AIM_ADDR;
//����:���赽�洢��(������������ڲ���FLASH)DMA_DIR_PeripheralSRC:Ϊ�������赽�ڴ� DMA_DIR_PeripheralDST:Ϊ�������赽�ڴ�
DMA_InitStructure.DMA_DIR = _DMA_DIR ;
//�����С
DMA_InitStructure.DMA_BufferSize = _BUFFER_SIZE;
//����(�ڲ���FLASH)��ַ����
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//�ڴ��ַ����
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
//�������ݵ�λ
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;//DMA_PeripheralDataSize_Byte; //ע��������Ҫ�����������;�����
//�ڴ����ݵ�λ
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;//DMA_MemoryDataSize_Byte; //ע��������Ҫ�����������;�����
//DMAģʽ,һ�λ���ѭ��ģʽ
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
//DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
//���ȼ�:��
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;
//ʹ���ڴ浽�ڴ�Ĵ���
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
//����DMAͨ��
DMA_Init(_DMAy_Channelx , &DMA_InitStructure);
//ʹ��DMA
DMA_Cmd(_DMAy_Channelx , ENABLE);
}
///Դ������Ŀ���ַ���ݶԱ�
uint8_t _Buffercmp(const uint32_t *pBuffer, uint32_t * pBuffer1 , uint16_t BufferLength){
/*���ݳ��ȵݼ�*/
while(BufferLength--){
// Usart_SendHalf_32_Word(_DEBUG_USARTx,*pBuffer);
// Usart_SendHalf_32_Word(_DEBUG_USARTx,*pBuffer1);
/*�ж���������Դ�Ƿ����*/
if(*pBuffer != *pBuffer1){
/* ��Ӧ����Դ����������˳�����,������ 0 */
return 0;
}
/* ������������Դ�ĵ�ַָ�� */
pBuffer++;
pBuffer1++;
}
/* ����жϲ��Ҷ�Ӧ������� */
return 1;
}
//��RAM���ݽ���չʾ
void _Buffer_Show(uint32_t * pBuffer , uint16_t BufferLength){
/*���ݳ��ȵݼ�*/
while(BufferLength--){
Usart_SendHalf_32_Word(_DEBUG_USARTx,*pBuffer++);
}
}
//DMA���ڴ�ROM���ݵ�ȡ��
void _DMA_ROM_TO_RAM(uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR ){
//----------------------------------------------------------------
printf("��ʼ ROM�ڴ浽RAM�ڴ��DMA���� \n");
//�ڴ浽�ڴ�DMA��ʼ��
_DMA_Config(Map_DMA_CHANNEL ,_BUFFER_SIZE ,_DMA_Source_ADDR , _DMA_AIM_ADDR , DMA_DIR_PeripheralSRC);
while(DMA_GetFlagStatus(DMA_FLAG_TC) == RESET); //�ж�DMA�������Ƿ���ȷ
if(_DMA_InnerChange_== 0 ){
printf("ROM�ڴ浽DMA�����쳣 \n");
}else{
printf("ROM�ڴ浽DMA�������� \n");
}
_RMA_InnerShow_;
}
//DMA��RAM��USART���ݵ�ȡ��
void _DMA_RAM_TO_USART(uint32_t _BUFFER_SIZE , uint32_t _DMA_Source_ADDR, uint32_t _DMA_AIM_ADDR ){
// ��ʼ USART�ڴ浽RAM�ڴ��DMA����
printf("\n��ʼ ROM��USART�Ĵ��ͳ�ʼ��\n");
USART_BUFFER_SIZE = _BUFFER_SIZE;
USART_DMA_Buffer = _DMA_AIM_ADDR;
//�ڴ浽USART DMA��ʼ��
_USART_DMA_Config(USART_DMA_CHANNEL ,USART_BUFFER_SIZE ,_DMA_Source_ADDR , USART_DMA_Buffer , DMA_DIR_PeripheralDST);
USART_DMACmd(_DEBUG_USARTx , USART_DMAReq_Tx , ENABLE); //����DMAʹ��
/*USART_DMACmd �������ڿ��� USART �� DMA ����������رա�������������
��,��һ�������������ô�������,������ USART1/2/3 �� UART4/5 �� 5 ��������ѡ,��
�����������ô��ڵľ��� DMA ����,�д��ڷ������� USART_DMAReq_Tx �ͽ�������
USART_DMAReq_Rx ��ѡ,�������������������������� ENABLE ���߹ر�����*/
fn_Systick_Delay(250,_Systick_ms); //DMA ��������н���LED�����˸
while(USART_GetFlagStatus(_DEBUG_USARTx,USART_FLAG_TXE)==RESET);
printf("\rROM�ڴ浽USART�����DMA�������\n");//���������ҪDelay һ��ʱ��ſ�����
}
//----------------------------------------------------------------
����EXIT�� ͷ�ļ� Exit_book.h
�������� :
#ifndef __EXIT_BOOK_H_
#define __EXIT_BOOK_H_
#include "stm32f10x.h"
#define _KEY_EXTI_IN_GPIO_Port GPIOA
#define _KEY_EXTI_IN_GPIO_Pin GPIO_Pin_0
#define _EXTI_IN_GPIO_PortSource GPIO_PortSourceGPIOA
#define _EXTI_IN_GPIO_PinSource GPIO_PinSource0
#define _EXTI_IN_EXTI_Line EXTI_Line0
#define _EXTI_IN_EXTI_Trigger EXTI_Trigger_Rising
#define _EXTI_IN_GPIO_Clock RCC_APB2Periph_AFIO
#define _EXTI_IN_EXTI_Mode EXTI_Mode_Interrupt
#define _EXTI_IN_EXTI_LineCmd ENABLE
#define _NVIC_IN_EXTI_IRQChannel EXTI0_IRQn
#define _NVIC_IN_EXTI_IRQChannelCmd ENABLE
#define _KEY2_EXTI_IN_GPIO_Port GPIOC
#define _KEY2_EXTI_IN_GPIO_Pin GPIO_Pin_13
#define _EXTI_IN2_GPIO_PortSource GPIO_PortSourceGPIOC
#define _EXTI_IN2_GPIO_PinSource GPIO_PinSource13
#define _EXTI_IN2_EXTI_Line EXTI_Line13
#define _EXTI_IN2_EXTI_Trigger EXTI_Trigger_Falling
#define _EXTI_IN2_GPIO_Clock RCC_APB2Periph_AFIO
#define _EXTI_IN2_EXTI_Mode EXTI_Mode_Interrupt
#define _EXTI_IN2_EXTI_LineCmd ENABLE
#define _NVIC_IN2_EXTI_IRQChannel EXTI15_10_IRQn
#define _NVIC_IN2_EXTI_IRQChannelCmd ENABLE
void fn_EXTI_GPIO_Config(void);
void fn_NVIC_Config(void);
void EXTI0_IRQHandler(void);
#endif
����EXIT��C�ļ� Exit_book.c
�������� :
#include "Exit_book.h"
#include "Led_book.h"
/**************************************************************
* @brief
* void fn_EXTI_GPIO_Config(void)
* @param
*
* #define _KEY_EXTI_IN_GPIO_Port GPIOA
* #define _KEY_EXTI_IN_GPIO_Pin GPIO_Pin_0
* #define _EXTI_IN_GPIO_PortSource GPIO_PortSourceGPIOA
* #define _EXTI_IN_GPIO_PinSource GPIO_PinSource0
* #define _EXTI_IN_EXTI_Line EXTI_Line0
* #define _EXTI_IN_EXTI_Trigger EXTI_Trigger_Rising
* #define _EXTI_IN_GPIO_Clock RCC_APB2Periph_AFIO
* #define _EXTI_IN_EXTI_Mode EXTI_Mode_Interrupt
* #define _EXTI_IN_EXTI_LineCmd ENABLE
*
* #define _KEY2_EXTI_IN_GPIO_Port GPIOC
* #define _KEY2_EXTI_IN_GPIO_Pin GPIO_Pin_13
* #define _EXTI_IN2_GPIO_PortSource GPIO_PortSourceGPIOC
* #define _EXTI_IN2_GPIO_PinSource GPIO_PinSource13
* #define _EXTI_IN2_EXTI_Line EXTI_Line13
* #define _EXTI_IN2_EXTI_Trigger EXTI_Trigger_Falling
* #define _EXTI_IN2_GPIO_Clock RCC_APB2Periph_AFIO
* #define _EXTI_IN2_EXTI_Mode EXTI_Mode_Interrupt
* #define _EXTI_IN2_EXTI_LineCmd ENABLE
* @retval
*************************************************************/
void fn_EXTI_GPIO_Config(void){
EXTI_InitTypeDef EXIT_InitStruck;
RCC_APB2PeriphClockCmd(_EXTI_IN_GPIO_Clock , ENABLE);
//ע��:���dz��˿� GPIO �Ķ˿�ʱ����,���ǻ����� AFIO ��ʱ��
GPIO_EXTILineConfig(_EXTI_IN_GPIO_PortSource | _EXTI_IN2_GPIO_PortSource , _EXTI_IN_GPIO_PinSource | _EXTI_IN2_GPIO_PinSource);
/* ѡ�� EXTI ���ź�Դ */
// GPIO_EXTILineConfig ��������ָ���ж�/�¼��ߵ�����Դ,��ʵ�����趨�ⲿ�ж���
// �üĴ����� AFIO_EXTICRx ֵ,�ú���������������,��һ������ָ�� GPIO �˿�Դ,��
// ��������Ϊѡ���Ӧ GPIO ����Դ��š�
EXIT_InitStruck.EXTI_Line = _EXTI_IN_EXTI_Line ; /* ѡ�� EXTI ���ź�Դ */
EXIT_InitStruck.EXTI_Mode = _EXTI_IN_EXTI_Mode; /* EXTI Ϊ�ж�ģʽ */
EXIT_InitStruck.EXTI_Trigger = _EXTI_IN_EXTI_Trigger ; /* �������ж� */
EXIT_InitStruck.EXTI_LineCmd = _EXTI_IN_EXTI_LineCmd; /* ʹ���ж� */
EXTI_Init(&EXIT_InitStruck);
// EXTI��ʼ�����õı���
// fn_NVIC_Config();
// ���� NVIC_Configuration������ɶ��� 1������ 2 ���ȼ����ò�ʹ���ж�ͨ��
EXIT_InitStruck.EXTI_Line = _EXTI_IN2_EXTI_Line; /* ѡ�� EXTI ���ź�Դ */
EXIT_InitStruck.EXTI_Mode = _EXTI_IN2_EXTI_Mode; /* EXTI Ϊ�ж�ģʽ */
EXIT_InitStruck.EXTI_Trigger = _EXTI_IN2_EXTI_Trigger; /* �½����ж� */
EXIT_InitStruck.EXTI_LineCmd = _EXTI_IN_EXTI_LineCmd;/* ʹ���ж� */
EXTI_Init(&EXIT_InitStruck);
fn_NVIC_Config();
}
/**************************************************************
* @brief
* void fn_NVIC_Config(void)
* @param
* #define _NVIC_IN_EXTI_IRQChannel EXTI0_IRQn
* #define _NVIC_IN_EXTI_IRQChannelCmd ENABLE
* #define _NVIC_IN2_EXTI_IRQChannel EXTI15_10_IRQn
* #define _NVIC_IN2_EXTI_IRQChannelCmd ENABLE
* @retval
*************************************************************/
void fn_NVIC_Config(void){
NVIC_InitTypeDef NVIC_InitStruct;
/* ���� NVIC Ϊ���ȼ��� 1 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* �����ж�Դ: */
NVIC_InitStruct.NVIC_IRQChannel = _NVIC_IN_EXTI_IRQChannel; //EXTI0_IRQn;
/* ������ռ���ȼ�:1 */
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
/* ���������ȼ�:1 */
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
/* ʹ���ж�ͨ�� */
NVIC_InitStruct.NVIC_IRQChannelCmd = _NVIC_IN_EXTI_IRQChannelCmd; //ENABLE
NVIC_Init(&NVIC_InitStruct);
/* �����ж�Դ: */
NVIC_InitStruct.NVIC_IRQChannel = _NVIC_IN2_EXTI_IRQChannel; //EXTI0_IRQn;
NVIC_Init(&NVIC_InitStruct);
}
/**************************************************************
* @brief
* void fn_NVIC_Config(void)
* @param
* #define _KEY_EXTI_IN_GPIO_Port GPIOA
* #define _KEY_EXTI_IN_GPIO_Pin GPIO_Pin_0
* @retval
*************************************************************/
void EXTI0_IRQHandler(void){
// EXTI_GetITStatus ����������ȡ EXTI ���жϱ�־λ״̬,��� EXTI �����жϷ�����
//�����ء�SET�����ء�RESET����ʵ����,EXTI_GetITStatus ������ͨ����ȡ
//EXTI_PR�Ĵ���ֵ���ж� EXTI��״̬�ġ�
if(EXTI_GetITStatus(_EXTI_IN_EXTI_Line)!= RESET){
if(GPIO_ReadInputDataBit(_KEY_EXTI_IN_GPIO_Port, _KEY_EXTI_IN_GPIO_Pin)==1){
__LED_Change__;
}
}
EXTI_ClearITPendingBit(_EXTI_IN_EXTI_Line); // ��Ҫ������жϱ�־λ
}
void EXTI15_10_IRQHandler(void){
if(EXTI_GetITStatus(_EXTI_IN2_EXTI_Line)!= RESET){
if(GPIO_ReadInputDataBit(_KEY2_EXTI_IN_GPIO_Port, _KEY2_EXTI_IN_GPIO_Pin)==0){
__LED_Change__;
}
}
EXTI_ClearITPendingBit(_EXTI_IN2_EXTI_Line); // ��Ҫ������жϱ�־λ
}
����Key����� ͷ�ļ� Key_book.h
�������� :
#ifndef __KEY_BOOK_H_
#define __KEY_BOOK_H_
#include "stm32f10x.h"
#include "Led_book.h"
#define KEY_IN_GPIO_Port GPIOA
#define KEY_IN_GPIO_Clock RCC_APB2Periph_GPIOA
#define KEY_IN_GPIO_Pin GPIO_Pin_0
#define KEY_IN_GPIO_Pin_Bit 0
#define Key_IN_GPIO_Modle GPIO_Mode_IN_FLOATING //��������
#define KEY2_IN_GPIO_Port GPIOC
#define KEY2_IN_GPIO_Clock RCC_APB2Periph_GPIOC
#define KEY2_IN_GPIO_Pin GPIO_Pin_13
#define KEY2_IN_GPIO_Pin_Bit 13
#define Key2_IN_GPIO_Modle GPIO_Mode_IN_FLOATING //��������
typedef union {
struct{
unsigned char BIT0:1;unsigned char BIT1:1;unsigned char BIT2:1;unsigned char BIT3:1;
unsigned char BIT4:1;unsigned char BIT5:1;unsigned char BIT6:1;unsigned char BIT7:1;
//unsigned char BIT8:1;unsigned char BIT9:1;unsigned char BIT10:1;unsigned char BIT11:1;
//unsigned char BIT12:1;unsigned char BIT13:1;unsigned char BIT14:1;unsigned char BIT15:1;
}DATA_BIT;
uint8_t DATA_BYTE;
}Per_key_type;
extern volatile Per_key_type key_flag;
#define bkey_10ms key_flag.DATA_BIT.BIT0
#define bkey_judge key_flag.DATA_BIT.BIT1
#define bkey_judge_long key_flag.DATA_BIT.BIT2
#define bkey_Effect key_flag.DATA_BIT.BIT3
#define bkey_LongEffect key_flag.DATA_BIT.BIT4
#define bkey_Effect_Lose key_flag.DATA_BIT.BIT5
#define bkey_Effect_LLose key_flag.DATA_BIT.BIT6
void fn_Key_GPIO_Config( GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock , uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef );
void fn_Key_Init(void);
void fn_key_judge(void);
void fn_key_Effect(void);
void fn_key_Check(void);
#endif
����Key��C�ļ� Key_book.c
�������� :
#include "Key_book.h"
volatile Per_key_type key_flag;
/**************************************************************
* @brief
* void fn_Key_GPIO_Config( GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock ,
* uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef );
* @param
* #define KEY_IN_GPIO_Port GPIOA
* #define KEY_IN_GPIO_Clock RCC_APB2Periph_GPIOA
* #define KEY_IN_GPIO_Pin GPIO_Pin_0
* #define KEY_IN_GPIO_Pin_Bit 0
* #define Key_IN_GPIO_Modle GPIO_Mode_IN_FLOATING //��������
*
* #define KEY2_IN_GPIO_Port GPIOC
* #define KEY2_IN_GPIO_Clock RCC_APB2Periph_GPIOC
* #define KEY2_IN_GPIO_Pin GPIO_Pin_13
* #define KEY2_IN_GPIO_Pin_Bit 13
* #define Key2_IN_GPIO_Modle GPIO_Mode_IN_FLOATING //��������
* @retval
*************************************************************/
void fn_Key_GPIO_Config( GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock , uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef ){
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = _GPIOMode_TypeDef;
GPIO_InitStruct.GPIO_Pin = _GPIO_Pin_x;
RCC_APB2PeriphClockCmd(_GPIO_Clock,ENABLE);
GPIO_Init(_GPIO_x , &GPIO_InitStruct);
}
/**************************************************************
* @brief
* void fn_Key_Init(void);
* @param
* @retval
*************************************************************/
void fn_Key_Init(void){
fn_Key_GPIO_Config(KEY_IN_GPIO_Port,KEY_IN_GPIO_Clock,KEY_IN_GPIO_Pin,Key_IN_GPIO_Modle);
fn_Key_GPIO_Config(KEY2_IN_GPIO_Port,KEY2_IN_GPIO_Clock,KEY2_IN_GPIO_Pin,Key2_IN_GPIO_Modle);
}
/************************************************************
* @brief
* void fn_key_judge(void);
* @param
* @retval
**************************************************************/
#define _LONG_key 30
static uint16_t count_key ;
void fn_key_judge(void){
if(!bkey_10ms){return;}
bkey_10ms = 0;
if(GPIO_ReadInputDataBit(KEY_IN_GPIO_Port,KEY_IN_GPIO_Pin)){
if(count_key++<3){return;}
if(!bkey_judge){
bkey_judge = 1;
bkey_Effect = 1;
}else{
if(count_key>_LONG_key){
bkey_judge_long = 1;
bkey_LongEffect = 1;
}
}
}
else{
count_key = 0;
if(bkey_judge){
bkey_judge = 0;
if(bkey_judge_long){
bkey_judge_long = 0;
bkey_Effect_LLose = 1;
}else{
bkey_judge_long = 0;
bkey_Effect_Lose = 1;
}
}else{
bkey_judge = 0;
}
}
}
/************************************************************
* @brief
* void fn_key_Effect(void);
* @param
* @retval
*************************************************************/
void fn_key_Effect(void){
if(bkey_Effect){
bkey_Effect = 0;
fn_LED_Corporate(LED_OUT_GPIO_Port,LED_OUT_GPIO_Pin,LED_Corporate_Toggle);
}
}
/**************************************************************
* @brief
* void fn_key_Check(void);
* @param
* @retval
*************************************************************/
void fn_key_Check(void){
fn_key_judge();
fn_key_Effect();
}
����LED ��ͷ�ļ� Led_book.h
�������� :
#ifndef __LED_BOOK_H_
#define __LED_BOOK_H_
#include "stm32f10x.h"
#define LED_OUT_GPIO_Port GPIOB //GPIO Point
#define LED_OUT_GPIO_Clock RCC_APB2Periph_GPIOB //GPIO clock
#define LED_OUT_GPIO_Pin GPIO_Pin_5
#define LED_OUT_GPIO_Pin_Bit 5
#define LED_OUT_GPIO_Modle GPIO_Mode_Out_PP
#define LED_R_OUT_GPIO_Pin GPIO_Pin_5
#define LED_G_OUT_GPIO_Pin GPIO_Pin_0
#define LED_B_OUT_GPIO_Pin GPIO_Pin_1
typedef enum {
LED_Corporate_On = 1,
LED_Corporate_OFF = 2,
LED_Corporate_Toggle = 3,
} LED_Corporate_state_t;
void fn_LED_GPIO_Config(GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock ,\
uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef);
void fn_Led_Init(void);
void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x , \
LED_Corporate_state_t _LED_Corporate_state_t );
void fn_LED_ALL_OFF(void);
#define __LED_Change__ fn_LED_Corporate(LED_OUT_GPIO_Port,LED_OUT_GPIO_Pin,LED_Corporate_Toggle)
#define __R_OUT__ GPIO_ResetBits(LED_OUT_GPIO_Port,LED_R_OUT_GPIO_Pin)
#define __G_OUT__ GPIO_ResetBits(LED_OUT_GPIO_Port,LED_G_OUT_GPIO_Pin)
#define __B_OUT__ GPIO_ResetBits(LED_OUT_GPIO_Port,LED_B_OUT_GPIO_Pin)
#endif
����LED �� �ļ� Led_book.c
�������� :
#include "Led_book.h"
/**************************************************************
* @brief
* void fn_LED_GPIO_Config(GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock ,
* uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef);
* @param
* @retval
*************************************************************/
#define LED_GPIO_Speed GPIO_Speed_10MHz
void fn_LED_GPIO_Config(GPIO_TypeDef* _GPIO_x , uint32_t _GPIO_Clock ,uint16_t _GPIO_Pin_x , GPIOMode_TypeDef _GPIOMode_TypeDef){
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = _GPIOMode_TypeDef;
GPIO_InitStruct.GPIO_Pin = _GPIO_Pin_x;
GPIO_InitStruct.GPIO_Speed = LED_GPIO_Speed;
RCC_APB2PeriphClockCmd(_GPIO_Clock ,ENABLE);
GPIO_Init(_GPIO_x , &GPIO_InitStruct) ;
GPIO_SetBits(_GPIO_x,_GPIO_Pin_x);
}
/**************************************************************
* @brief
* void fn_Led_Init(void);
* @param
* @retval
*************************************************************/
void fn_Led_Init(void){
fn_LED_GPIO_Config (LED_OUT_GPIO_Port,LED_OUT_GPIO_Clock,LED_OUT_GPIO_Pin,LED_OUT_GPIO_Modle);
fn_LED_GPIO_Config (LED_OUT_GPIO_Port,LED_OUT_GPIO_Clock,LED_R_OUT_GPIO_Pin,LED_OUT_GPIO_Modle);
fn_LED_GPIO_Config (LED_OUT_GPIO_Port,LED_OUT_GPIO_Clock,LED_G_OUT_GPIO_Pin,LED_OUT_GPIO_Modle);
fn_LED_GPIO_Config (LED_OUT_GPIO_Port,LED_OUT_GPIO_Clock,LED_B_OUT_GPIO_Pin,LED_OUT_GPIO_Modle);
fn_LED_ALL_OFF();
}
/**************************************************************
* @brief
* void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x ,
* LED_Corporate_state_t _LED_Corporate_state_t );
* @param
* @retval
*************************************************************/
void fn_LED_Corporate(GPIO_TypeDef* _GPIO_x , uint16_t _GPIO_Pin_x , LED_Corporate_state_t _LED_Corporate_state_t ){
switch(_LED_Corporate_state_t){
case LED_Corporate_On :
GPIO_SetBits(_GPIO_x,_GPIO_Pin_x);
break;
case LED_Corporate_OFF:
GPIO_ResetBits(_GPIO_x,_GPIO_Pin_x);
break;
case LED_Corporate_Toggle:
GPIO_ReadOutputDataBit(_GPIO_x,_GPIO_Pin_x)?GPIO_ResetBits(_GPIO_x,_GPIO_Pin_x):GPIO_SetBits(_GPIO_x,_GPIO_Pin_x);
break;
}
}
void fn_LED_ALL_OFF(void){
GPIO_SetBits(LED_OUT_GPIO_Port,LED_R_OUT_GPIO_Pin);
GPIO_SetBits(LED_OUT_GPIO_Port,LED_G_OUT_GPIO_Pin);
GPIO_SetBits(LED_OUT_GPIO_Port,LED_B_OUT_GPIO_Pin);
}
//practice
//fn_LED_GPIO_Config (LED_OUT_GPIO_Port,LED_OUT_GPIO_Clock,LED_OUT_GPIO_Pin,LED_OUT_GPIO_Modle);
// while(1){
// delay(10000);
// fn_LED_Corporate(LED_OUT_GPIO_Port,LED_OUT_GPIO_Pin,LED_Corporate_Toggle);
// }
���� Systick����� ͷ�ļ� Systick_book.h
�������� :
#ifndef __SYSTIC_BOOK_H_
#define __SYSTIC_BOOK_H_
#include "stm32f10x.h"
#include "Key_book.h"
typedef enum {
_Systick_us = 1,
_Systick_ms = 2,
_Systick_s = 3,
} Systick_time_state_t;
void fn_Systick_Delay(uint32_t _Delay_time , Systick_time_state_t _Systick_time_state_t);
void fn_Systick_Delay_Handler_set(uint32_t _Delay_ms , Systick_time_state_t _Systick_time_state_t);
void fn_SysTick_delay_decrement(void);
void SysTick_Handler(void);
#define __Systick_Delay_Handler_set__ fn_Systick_Delay_Handler_set(10,_Systick_ms)
#endif
���� Systick��C�ļ� Systick_book.c
�������� :
#include "Systick_book.h"
/************************************************************
* @brief
* void fn_Systick_Delay(uint32_t _Delay_time , \
Systick_time_state_t _Systick_time_state_t){
* @param
* @retval
*************************************************************/
void fn_Systick_Delay(uint32_t _Delay_time , Systick_time_state_t _Systick_time_state_t){
uint32_t i;
if(_Systick_time_state_t == _Systick_us){SysTick_Config(SystemCoreClock/1000000);}
if(_Systick_time_state_t == _Systick_ms){
SysTick_Config(SystemCoreClock/1000);
}
else{SysTick_Config(SystemCoreClock);}
for( i=0;i<_Delay_time ; i++){
while(!((SysTick->CTRL)&(1<<16)));
}
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
/************************************************************
* @brief
* void fn_Systick_Delay_Handler_set(uint32_t _Delay_ms , \
* Systick_time_state_t _Systick_time_state_t){
* @param
* @retval
*************************************************************/
static uint32_t _SysTick_delay = 0 ;
void fn_Systick_Delay_Handler_set(uint32_t _Delay_ms , Systick_time_state_t _Systick_time_state_t){
if(_Systick_time_state_t == _Systick_us){SysTick_Config(SystemCoreClock/1000000);}
if(_Systick_time_state_t == _Systick_ms){
SysTick_Config(SystemCoreClock/1000);
}
else{SysTick_Config(SystemCoreClock);}
_SysTick_delay = _Delay_ms ;
}
/************************************************************
* @brief
* void fn_SysTick_delay_decrement(void)
* @param
* @retval
*************************************************************/
static uint32_t SysTick_delay = 0 ;
void fn_SysTick_delay_decrement(void){
if(SysTick_delay++ > _SysTick_delay){
SysTick_delay = 0;
bkey_10ms = 1;
}
}
/************************************************************
* @brief
* void SysTick_Handler(void)
* @param
* @retval
*************************************************************/
void SysTick_Handler(void){
fn_SysTick_delay_decrement();
}
���� ͷ�ļ����� ͷ�ļ� PROJ_book.h
�������� :
#ifndef __PROJ_BOOK_H__
#define __PROJ_BOOK_H__
#include "stm32f10x.h"
#include "Led_book.h"
#include "Key_book.h"
#include "RCC_book.h"
#include "Systick_book.h"
#include "Exit_book.h"
#include "USART_book.h"
#include "DMA_book.h"
#include "I2C_book.h"
#include "I2C_soft_book.h"
#endif
