一、硬件方面
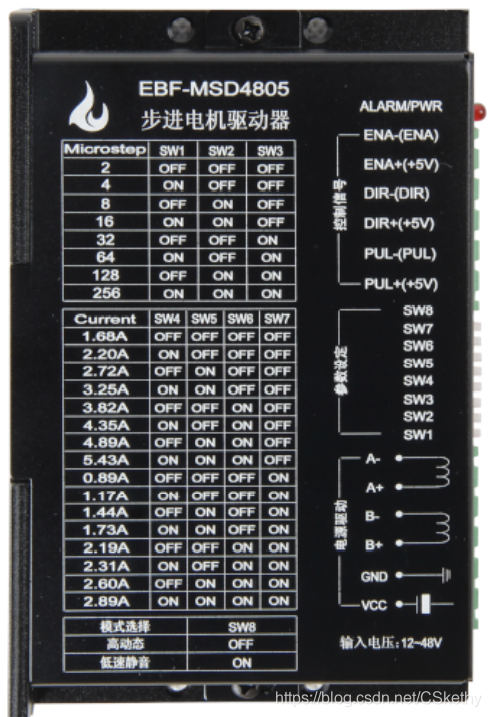
本次步进电机使用的是混合式二相步进电机
?电机与驱动的连接
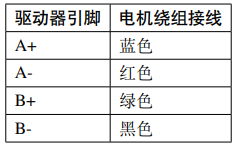
二相步距角为1.8°,对于硬件连接(电机驱动和stm32单片机)方面有共阴共阳两种方式
本次采用共阳的连接方式,如图中驱动器的控制信号,PUL连接PC7? DIR连接PE5,ENA连接PE6
其余正信号均连接+5V至单片机
?
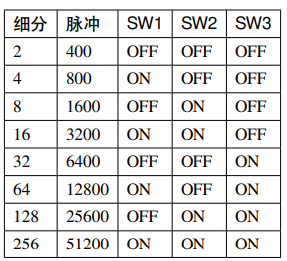
SW1~SW3的细分设置?
?
二、软件方面
程序主要分为主函数、驱动模块、串口(非必须)、PWM、TIM
main.c:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "usmart.h"
#include "key.h"
#include "driver.h"
#include "encoder.h"
#include "pwm.h"
#include "tim.h"
#include "lcd.h"
int main(void)
{
u8 i;
u8 keyval;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//系统中断优先级
delay_init(168);
uart_init(115200); //初始化串口波特率
usmart_dev.init(84); //初始化串口
LED_Init();
KEY_Init();
Driver_Init();
TIM8_OPM_RCR_Init(999,168-1); //1MHz计数频率
while(1)
{
keyval=KEY_Scan(0);
if(keyval==KEY0_PRES)
{
Locate_Abs(0,3000);//按下keyo回原点
}else if(keyval==WKUP_PRES)
{
Locate_Rle(1048,500,CW);//顺时针1048脉冲
}
// else if(keyval==KEY0_PRES)
{
Locate_Rle(1048,500,CCW);//逆时针1045脉冲,频率为500Hz
}
delay_ms(1);
i++;
if(i==50)
{
i=0;
LED1=!LED1;
}
}
}
driver.c:
其中包含绝对定位函数和相对定位函数
#include "driver.h"
#include "delay.h"
#include "usart.h"
u8 rcr_remainder; //重复计数余数部分
u8 is_rcr_finish=1; //重复计数器是否设置完成
long rcr_integer; //重复计数整数部分
long target_pos=0; //有符号方向
long current_pos=0; //有符号方向
DIR_Type motor_dir=CW;//顺时针
/************** 驱动器控制信号线初始化 ****************/
void Driver_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIOE时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6; //DRIVER_DIR DRIVER_OE对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE5,6
GPIO_SetBits(GPIOE,GPIO_Pin_5);//PE5输出高 顺时针方向 DRIVER_DIR
GPIO_ResetBits(GPIOE,GPIO_Pin_6);//PE6输出低 使能输出 DRIVER_OE
}
/***********************************************
//TIM8_CH2(PC7) 单脉冲输出+重复计数功能初始化
//TIM8 时钟频率 84*2=168MHz
//arr:自动重装值
//psc:时钟预分频数
************************************************/
void TIM8_OPM_RCR_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8,ENABLE); //TIM8时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); //使能PORTC时钟
GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_TIM8); //GPIOC7复用为定时器8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //GPIOC7
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //下拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ClearITPendingBit(TIM8,TIM_IT_Update);
TIM_UpdateRequestConfig(TIM8,TIM_UpdateSource_Regular); /********* 设置只有计数溢出作为更新中断 ********/
TIM_SelectOnePulseMode(TIM8,TIM_OPMode_Single);/******* 单脉冲模式 **********/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出2使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; /****** 比较输出2N失能 *******/
TIM_OCInitStructure.TIM_Pulse = arr>>1; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM8, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable); //CH2预装载使能
TIM_ARRPreloadConfig(TIM8, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_ITConfig(TIM8, TIM_IT_Update ,ENABLE); //TIM8 使能或者失能指定的TIM中断
NVIC_InitStructure.NVIC_IRQChannel = TIM8_UP_TIM13_IRQn; //TIM8中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级1级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //从优先级1级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_ClearITPendingBit(TIM8, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}
/******* TIM8更新中断服务程序 *********/
void TIM8_UP_TIM13_IRQHandler(void)
{
if(TIM_GetITStatus(TIM8,TIM_FLAG_Update)!=RESET)//更新中断
{
TIM_ClearITPendingBit(TIM8,TIM_FLAG_Update);//清除更新中断标志位
if(is_rcr_finish==0)//重复计数器未设置完成
{
if(rcr_integer!=0) //整数部分脉冲还未发送完成
{
TIM8->RCR=RCR_VAL;//设置重复计数值
rcr_integer--;//减少RCR_VAL+1个脉冲
}else if(rcr_remainder!=0)//余数部分脉冲 不位0
{
TIM8->RCR=rcr_remainder-1;//设置余数部分
rcr_remainder=0;//清零
is_rcr_finish=1;//重复计数器设置完成
}else goto out; //rcr_remainder=0,直接退出
TIM_GenerateEvent(TIM8,TIM_EventSource_Update);//产生一个更新事件 重新初始化计数器
TIM_CtrlPWMOutputs(TIM8,ENABLE); //MOE 主输出使能
TIM_Cmd(TIM8, ENABLE); //使能TIM8
if(motor_dir==CW) //如果方向为顺时针
current_pos+=(TIM8->RCR+1);//加上重复计数值
else //否则方向为逆时针
current_pos-=(TIM8->RCR+1);//减去重复计数值
}else
{
out: is_rcr_finish=1;//重复计数器设置完成
TIM_CtrlPWMOutputs(TIM8,DISABLE); //MOE 主输出关闭
TIM_Cmd(TIM8, DISABLE); //关闭TIM8
printf("当前位置=%ld\r\n",current_pos);//打印输出
}
}
}
/***************** 启动TIM8 *****************/
void TIM8_Startup(u32 frequency) //启动定时器8
{
u16 temp_arr=1000000/frequency-1;
TIM_SetAutoreload(TIM8,temp_arr);//设定自动重装值
TIM_SetCompare2(TIM8,temp_arr>>1); //匹配值2等于重装值一半,是以占空比为50%
TIM_SetCounter(TIM8,0);//计数器清零
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}
/********************************************
//相对定位函数
//num 0~2147483647
//frequency: 20Hz~100KHz
//dir: CW(顺时针方向) CCW(逆时针方向)
*********************************************/
void Locate_Rle(long num,u32 frequency,DIR_Type dir) //相对定位函数
{
if(num<=0) //数值小等于0 则直接返回
{
printf("\r\nThe num should be greater than zero!!\r\n");
return;
}
if(TIM8->CR1&0x01)//上一次脉冲还未发送完成 直接返回
{
printf("\r\nThe last time pulses is not send finished,wait please!\r\n");
return;
}
if((frequency<20)||(frequency>100000))//脉冲频率不在范围内 直接返回
{
printf("\r\nThe frequency is out of range! please reset it!!(range:20Hz~100KHz)\r\n");
return;
}
motor_dir=dir;//得到方向
DRIVER_DIR=motor_dir;//设置方向
if(motor_dir==CW)//顺时针
target_pos=current_pos+num;//目标位置
else if(motor_dir==CCW)//逆时针
target_pos=current_pos-num;//目标位置
rcr_integer=num/(RCR_VAL+1);//重复计数整数部分
rcr_remainder=num%(RCR_VAL+1);//重复计数余数部分
is_rcr_finish=0;//重复计数器未设置完成
TIM8_Startup(frequency);//开启TIM8
}
/********************************************
//绝对定位函数
//num -2147483648~2147483647
//frequency: 20Hz~100KHz
*********************************************/
void Locate_Abs(long num,u32 frequency)//绝对定位函数
{
if(TIM8->CR1&0x01)//上一次脉冲还未发送完成 直接返回
{
printf("\r\nThe last time pulses is not send finished,wait please!\r\n");
return;
}
if((frequency<20)||(frequency>100000))//脉冲频率不在范围内 直接返回
{
printf("\r\nThe frequency is out of range! please reset it!!(range:20Hz~100KHz)\r\n");
return;
}
target_pos=num;//设置目标位置
if(target_pos!=current_pos)//目标和当前位置不同
{
if(target_pos>current_pos)
motor_dir=CW;//顺时针
else
motor_dir=CCW;//逆时针
DRIVER_DIR=motor_dir;//设置方向
rcr_integer=abs(target_pos-current_pos)/(RCR_VAL+1);//重复计数整数部分
rcr_remainder=abs(target_pos-current_pos)%(RCR_VAL+1);//重复计数余数部分
is_rcr_finish=0;//重复计数器未设置完成
TIM8_Startup(frequency);//开启TIM8
}
}
driver.h :
#ifndef __DRIVER_H
#define __DRIVER_H
#include "sys.h"
#include "stdlib.h"
#define DRIVER_DIR PEout(5) // 旋转方向
#define DRIVER_OE PEout(6) // 使能脚 低电平有效
#define RCR_VAL 255 //每计数(RCR_VAL+1)次,中断一次,这个值(0~255)设置大一些可以降低中断频率
typedef enum
{
CW = 1,//高电平顺时针
CCW = 0,//低电平逆时针
}DIR_Type;//运行方向
extern long target_pos;//有符号方向
extern long current_pos;//有符号方向
void Driver_Init(void);//驱动器初始化
void TIM8_OPM_RCR_Init(u16 arr,u16 psc);//TIM8_CH2 单脉冲输出+重复计数功能初始化
void TIM8_Startup(u32 frequency); //启动定时器8
void Locate_Rle(long num,u32 frequency,DIR_Type dir); //相对定位函数
void Locate_Abs(long num,u32 frequency);//绝对定位函数
#endif
串口程序就不一一细讲了
pwm.c:
#include "pwm.h"
#include "led.h"
#include "usart.h"
//TIM14 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM14_PWM_Init(u32 arr,u32 psc)
{
//此部分需手动修改IO口设置
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9复用为定时器14
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);//初始化定时器14
//初始化TIM14 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低
TIM_OC1Init(TIM14, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable); //使能TIM14在CCR1上的预装载寄存器
TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPE使能
TIM_Cmd(TIM14, ENABLE); //使能TIM14
} 以上程序部分主要就是这些,希望对大家能有帮助。