/**
* @brief 初始化MPU6050芯片
* @param
* @retval
*/
void MPU6050_Init(void)
{
//在初始化之前要延时一段时间,若没有延时,则断电后再上电数据可能会出错
Delay(100);
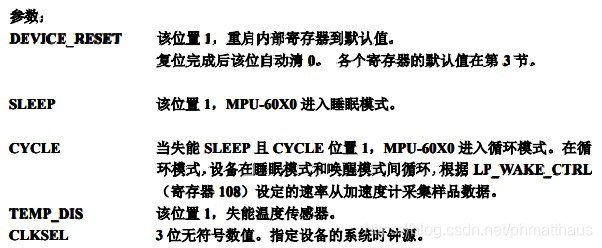
MPU6050_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00); //解除休眠状态
MPU6050_WriteReg(MPU6050_RA_SMPLRT_DIV, 0x07); //陀螺仪采样率
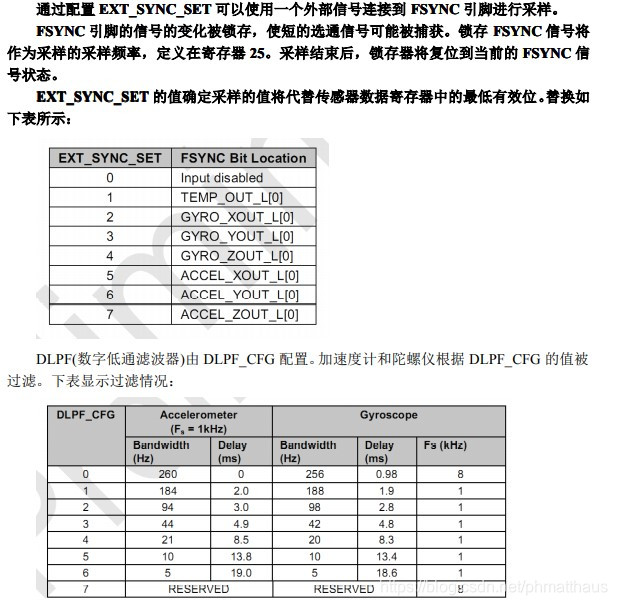
MPU6050_WriteReg(MPU6050_RA_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_RA_ACCEL_CONFIG, 0x01); //配置加速度传感器工作在2G模式
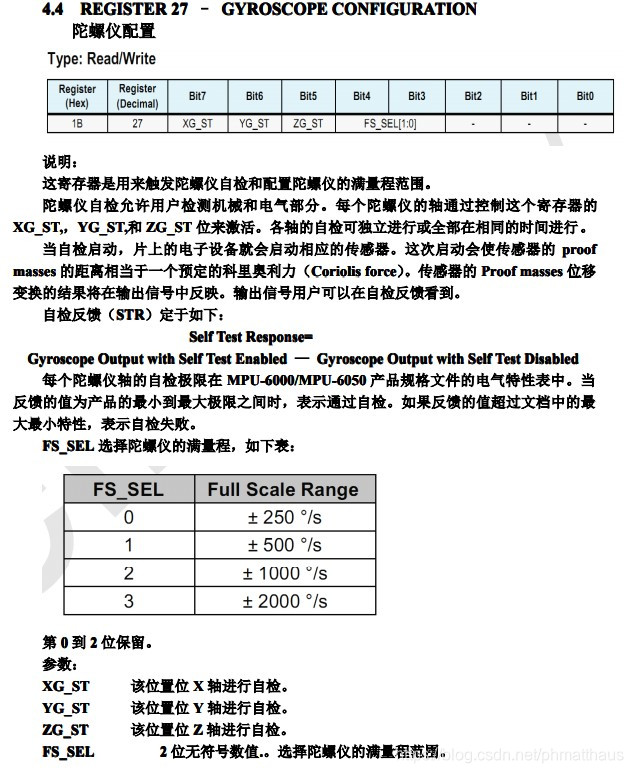
MPU6050_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
Delay(200);
}#define MPU6050_RA_PWR_MGMT_1 0x6B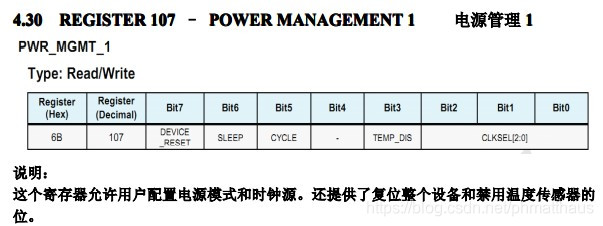
?
#define MPU6050_RA_SMPLRT_DIV 0x19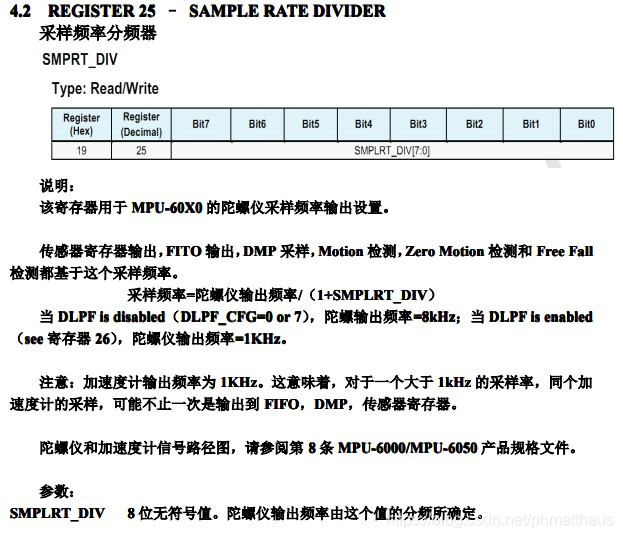
#define MPU6050_RA_CONFIG 0x1A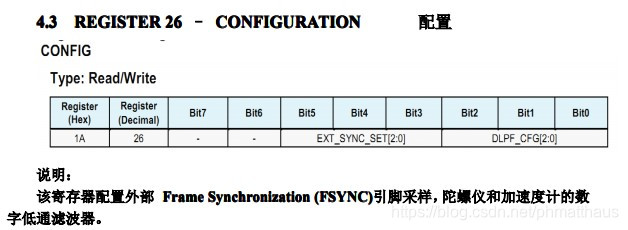
?
#define MPU6050_RA_ACCEL_CONFIG 0x1C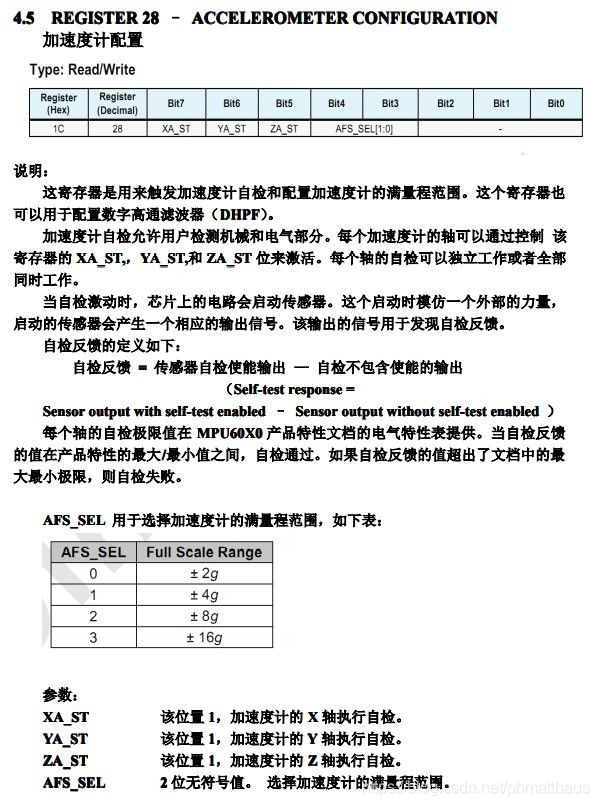
#define MPU6050_RA_GYRO_CONFIG 0x1B