��Դ:���ںš���ӥ̸��Ƭ����
����:��ӥOsprey
ID ??:emOsprey
��һƪ���¡�������ǿ PWM ������,1 MHz !����ӥ��������ǿ PWM һЩ��������,������ӥ��ԭ���Ͻ������ʵ�ָù��ܡ�
����֮ǰ,���Ƚ���һ�� STM32F103 TIM ��һЩ�������:
��ʹ���ⲿ�����ж����� DMA (��Щ�ͺſ���)
��ʹ�� TIM ͬʱ���������غ��½��������ڿ����濴���ĺ���ʵ��ʹ��ʱ�ܵ�������,����ʱ��1��8,ͨ�ö�ʱ��2��3��4��5������,��һ��103 ��ֻ����Щ��ʱ����

 3����Ƶ�ź�����ʱ,�жϽ����Ƶ��,����� 100 K Ƶ��,����Ҫ 5 us ����һ��(�ߵ͵�ƽ��һ��,������ռ�ձ�Ϊ 50 % �����,����ռ�ձ�������Ϊ����),��������жϴ�����ʽ,��������ж�����ɺܶ����(���־�����㡢��ת���Ե�),ͬʱ����Ҫ��֤�������жϲ��ܱ�ȫ���ж���ֹ,���߱������ȼ��ж����,����,��õ��Ŀ��ܾͲ���һ������ĸߵ�ƽ��,�������ռ�ձȡ�Ƶ�ʶ������������
3����Ƶ�ź�����ʱ,�жϽ����Ƶ��,����� 100 K Ƶ��,����Ҫ 5 us ����һ��(�ߵ͵�ƽ��һ��,������ռ�ձ�Ϊ 50 % �����,����ռ�ձ�������Ϊ����),��������жϴ�����ʽ,��������ж�����ɺܶ����(���־�����㡢��ת���Ե�),ͬʱ����Ҫ��֤�������жϲ��ܱ�ȫ���ж���ֹ,���߱������ȼ��ж����,����,��õ��Ŀ��ܾͲ���һ������ĸߵ�ƽ��,�������ռ�ձȡ�Ƶ�ʶ������������
����Ϊ����������,������ PWM �������DZȽϳ����Ĺ���,������Ҫһ����Ч�IJ��������ɸù���������ӥ������ܵ�ʵ��ԭ������Ϊ�������Ч�ġ�
100K Ƶ����� 0%,ռ�ձ����1%!
��Ƕ��ʽ��,100 K Ƶ���Ѿ���Ƚϸߵ���,��Ȼ���ڹ�עռ�ձ������,���ֻ��עƵ��,��ô�ɲ�����Ƶ�ʽ����ߡ�
������Щ�˻�̧��,˵,���ﲻʹ�� FPGA����ӥ��Ȼ֪���бȵ�Ƭ������Ч�IJ�������,��Ϊ���Լ������������(��������Ŀ�������ӥԤ��,���Ը�һ�����Ż�,Ԥ��������Ҫ10������)�Ϳ��Բ���ܸߵ�Ƶ�ʡ�����,���������ڳɱ�,�����б�Ҫ��?����������ǿ��Ǽ��ٴ���
�л�����˵,��ӥ���Ƚ���һ�¸ò����Ļ���ԭ����
�ܼ�,�������ö������������ʵ�ֵġ�(2038����-��ͼ)

���������ӥ�ڱʼ���Ҳ��ν��������е�Ӧ��,�����������С���չ��ʱ��������������ʱ��,������ټ�һ��Ӧ��,PWM ����(��ƪ�ʼDz������������ԭ��,���Կ���ʷ��رʼ�)��
����˵�������������,�ڸ����������ݴ������绢����,��Ҳ�������������������,����Ҫ���ø��������һЩɧ����,������� PWM ���������ˡ�
��һ����������ʹ�� DMA ��,��������Ч�ɿ���ԭ��
�������ǿ�����ʱ���Ĺ��ɿ�ͼ:

�����ע���־���Ϊʲô PWM ����ģʽֻ��ʹ��ͨ�� 1 ��ͨ�� 2 ��ԭ��
����������TI1��ΪPWM����,��������ͨ��ͬʱ���� TI1 Ϊ��˵����
������������:
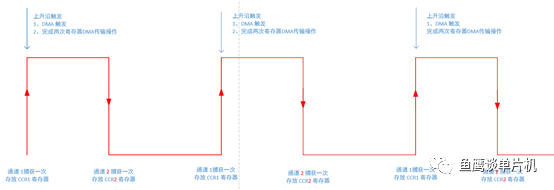
����ͨ�� 1 ���� DMA,ͬʱ��������������,����,ֻҪ�����ش�����,�����Զ��������DMA�������û����档ͨ�� 2 �½��ز���,������ DMA��
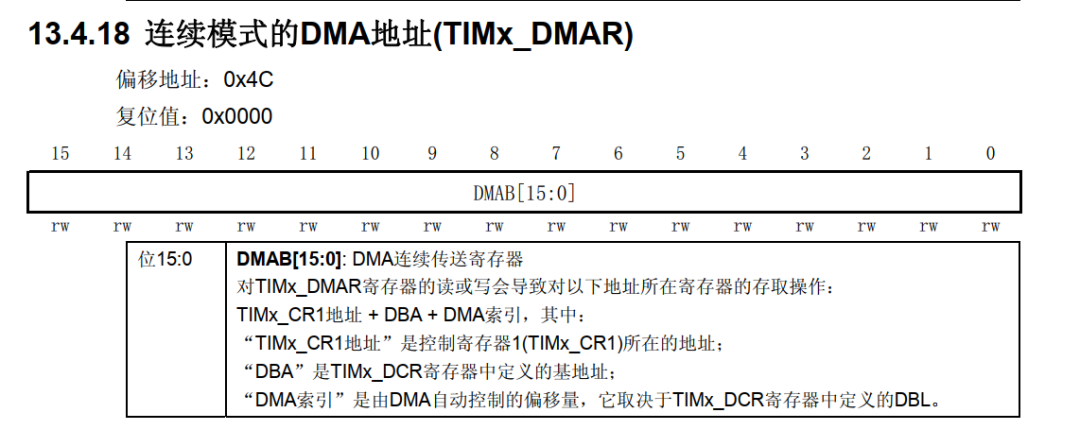
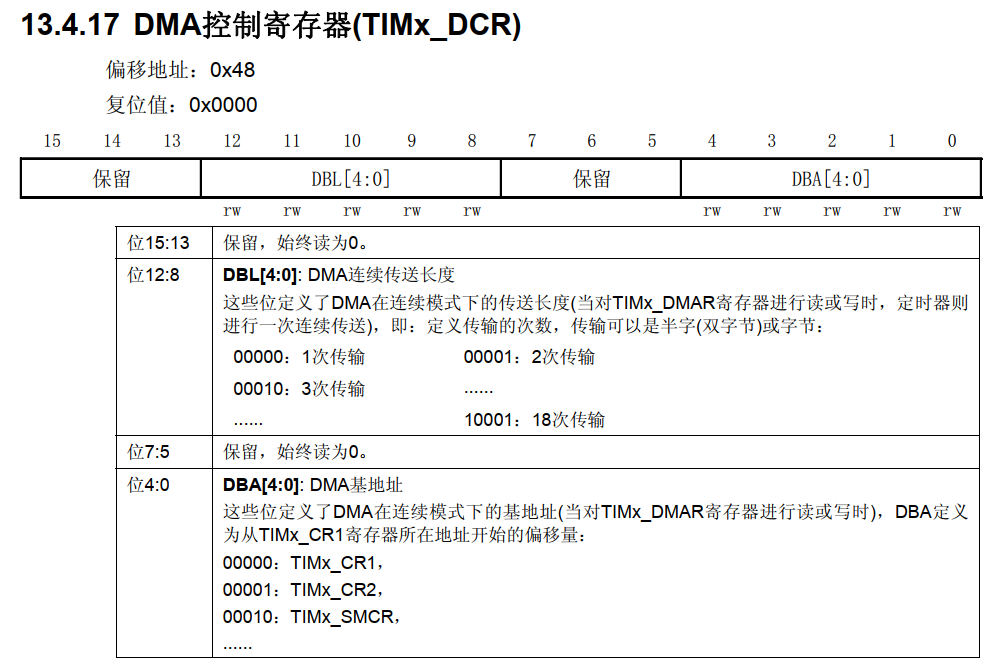
����DMA,���������ַ����ijһ���Ĵ���,���� DMAR,ͬʱ���ô�������,��һ���� 2 �ı���,��Ϊһ����Ҫ��������,32 λ���ȡ�
��Ϊ��Ҫ�������� CCRx,������Ҫ��ȷ���� DCR �Ĵ�����
�������þ�������������Ϊ�ؼ��IJ��֡������������������ܵIJ���ԭ��,����Ȼ֪��Ϊʲô��Ҫ��ô�����ˡ�
�������ȿ��� PWM ����ʱ������������:
�����Ҫ�˽� TIM һ������Ҫ��DMA ��������:ͨ�����üĴ���,����һ�δ���,���DMA��������,������������������Ҳ�������ˡ�
����������������?һ���������� DMA ����ʱ,���紮��,һ�������ַ���� DR �Ĵ���������������봫�� TIM �IJ���ֵ,���ǿ������ó� CCR1 �Ĵ����ĵ�ַ��
����Ҳ������������,����ֻ���ڴ���ʱ����һ���Ĵ�����ֵ,�����Ҫ�����β���ֵ������,��ô����Ҫ�������� DMA ͨ�����,���������漰�������� DMA ͨ��ͬ��������,��Ϊ��϶�ϣ��ÿ�βɼ����������ݶ�����ͬһ�����塣
���� TIM �����������Ĵ�������������,ͨ�� DMAR ��ת,�Ϳ������һ�δ���,������������ CCR ��ֵ��
��ؿ�������,��Ӧ�ô��֪���ò����ԭ����ʲô�ˡ�
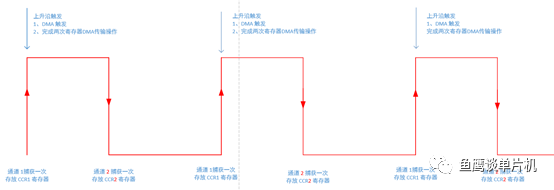
������ӥ�ٽ����ͼ����һ�¡�
��ʼ��(��ʱ����DMA��GPIO)��ɺ�,��ʱ�������ù�����,һ����һ����������,�����ش���,��ʱ��Ϊ������ DMA ����,ͬʱ�������������������Ĵ���,��������ѵ�ǰ�� CCR1 ����һ�β���� CCR2(�½��ش���)���䵽�û�����,�������� DMA ����,����DMA�ļ�������ݼ����Ρ����� CCR1 ��ֵ�� CCR2 ��ֵ��(��������������,���Ҳ�ֵ�����,��Сû������)������,��������δ���,���ǿ��Եõ����鲶�����ݡ�

ͨ�� (uint16_t)(CCR1 �C CCR2),���ǿ��Եõ��͵�ƽ,��ͨ������CCR1 ���� CCR2 �IJ�ֵ,���ǿ��Եõ���������������Ƶ�ʺ�ռ�ձȾͲ���ʲô�����ˡ��ر���Ҫע�����,���������ز����ڼ�,��ʱ�������Բ����������,�����ͨ����ʱ����Ƶʵ�֡���Ƶϵ��ԽС,�ֱ���Խ��,��Խ���������
����Ҫע�����,���Ƶ�ʱȽϸ�,����������������,Ȼ��ȡ���漸���������м�ƽ������ֵ����(������ݲ���ֵ��ȷ��),����ȷ�ȸ���һЩ,��Ϊ�տ�ʼ������Ϊ��ʼ����Ե��,�������Ⲷ��,���ǿ��ܵ�(�տ�ʼ��ȷ�����Բ�� 64 ����˵)��
����������� PWM Ƶ�ʻ�ռ�ձȻ����ϱ仯,Ҳ��Ҫ���������⼸��(��ʱ��),�����м���,���������պò��仯������,��֤�������Ŀɿ��ԡ�
��֮,��ôȥ����ij�����ӿɿ����Ǹ�λ���ѵ�������,��ӥֻ���ṩһ�����˼·��������ӥ�����ṩԴ�����λ����,���ɷ��Ӱɡ����ȷʵ����Ҫ�Ļ�,�ڱ�ƪ���¸���ǰ��ʱ����,�����й����ͻ������Ա��ö���ת��֧�ֵ����,��ôҲ����������ϵ��ӥ,��ӥ���Ը�һ�ݲο�����,�����ο�����ǰû�еľͱ�����ӥ�ˡ�
����,����������ǧ�ִ���,�����ټ���
------------------2021-08-29
�Ķ�ԭ������һƪ��һ����ʱ��ʵ��3·ʱ���ռ�ձȿɵ��IJ��Ρ�������,������һ��