目录
前言
最近发现电机类的步进电机挺有趣的,于是趁快开学了有空再码一篇,分享一下自己的学习心得,有哪里写的不好欢迎随时指正。
 ?
?
一、关于步进电机那点事
这次使用的是二相步进电机,博客上也有许多关于步进电机的博文啊,质量也是参差不齐,今天就给大家仔细的介绍一下该电机,我主要还是继承以往的风格,资料方面我也讲的少,主要还是侧重实操方向,希望能够带给大家帮助
下面是图:?
首先要认识一下步进电机上的几条线:
四条线(红、蓝、绿、黑)
正常来说对应A+、A-、B+、B-,在电机上基本上也都会标明代表含义,其实步进电机的原理其实都差不多,主要就是学会使用和了解原理就基本上达到我们的目的了,如果想要深入学习,那可以再继续研究・・・・・・
那么怎么使用呢?首先就要搭配一款步进电机的驱动器了,网上随便都可以买到,如图:

?这里我们很明显可以看到它有12个接口,这里再详细介绍一下如何使用接口:
V+:连接电源正极(注意电压在9V~32V之间即可,过大的话你懂得)
GND:连接电源负极
A+:连接电机绕组A+相
A-?:?连接电机绕组A-相
B+:连接电机绕组B+相
B- :?连接电机绕组B-相
CP+:脉冲信号输入正 ( PUL+ )(取决于共阴、共阳接法再来接线,共阴的话CP-接地,CP+接脉冲信号即定时器PWM输出)
CP-:脉冲信号输入负? ( PUL-)
DIR+:电机正、反转控制正(同样取决于共阴共阳接法)
DIR-:电机正、反转控制负
EN+:电机脱机控制正(可以不接)
EN-:电机脱机控制负
二、接线问题
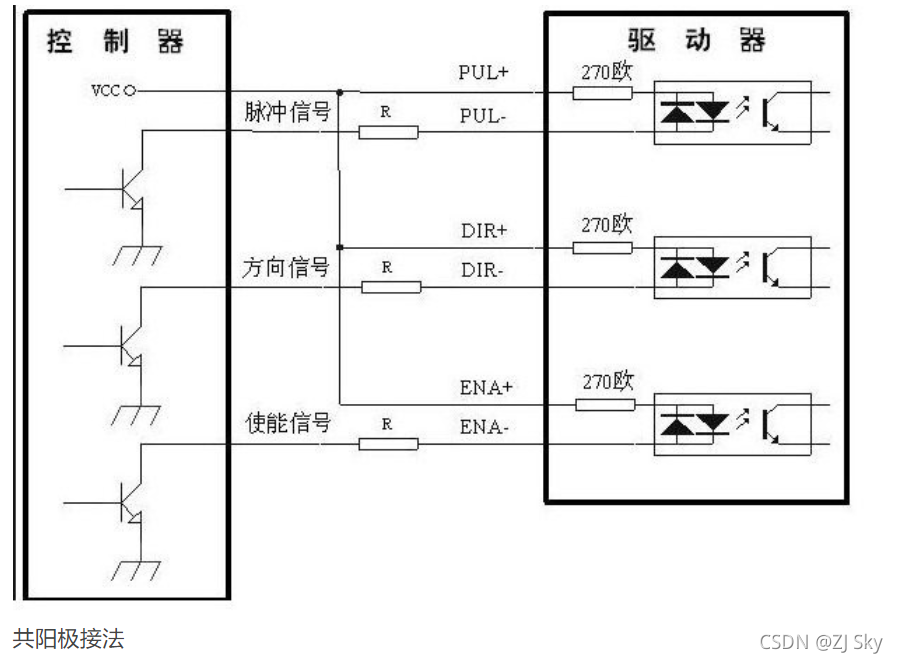
上面到这可能对它的接线有了一个想法了,那么具体如何接线呢?嘿嘿,这里有共阴和共阳的常见的两种接法,具体参照下图:
 ?
?
?这里我采用了共阴极的接法
那么我的接线:
DIR+:PA8(随便一个端口即可)
DIR-:GND
CP+:PA1(TIM2通道2)
CP-:GND
ENA不接
三、主要代码
这里的代码搬运后修改一些的,即可上手即可用
主函数
#include "stm32f10x.h"
#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "key.h"
#include "led.h"
#include "usmart.h"
#include "driver.h"
//共阴
/*
CP+->PA.1 CP-接GND
DIR+->PA.8 DIR-接GND
*/
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(115200);
KEY_Init();
Driver_Init();
TIM2_Init(999,72-1);
while(1)
{
Locate_Rle2(500,CW);
delay_ms(5000);
delay_ms(5000);
delay_ms(5000);
Locate_Rle2(500,CCW);
delay_ms(5000);
delay_ms(5000);
delay_ms(5000);
}
} ?定时器函数:
#include "stm32f10x.h"
#include "driver.h"
#include "delay.h"
#include "usart.h"
long current_pos[2]={0,0};
int motor_dir2=0;
u8 count[2]={0,0};
void Driver_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_8);
}
void TIM2_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //TIM2_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
TIM_UpdateRequestConfig(TIM2,TIM_UpdateSource_Regular);
TIM_SelectOnePulseMode(TIM2,TIM_OPMode_Single);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = arr>>1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_ITConfig(TIM2, TIM_IT_Update ,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
TIM_Cmd(TIM2, DISABLE);
}
/******* TIM2*********/
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_FLAG_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM2,TIM_FLAG_Update);
count[0]++;
TIM_GenerateEvent(TIM2,TIM_EventSource_Update);
TIM_Cmd(TIM2, ENABLE);
if(count[0]==200)
{
if(motor_dir2==CW)
current_pos[0]+=count[0];
else
current_pos[0]-=count[0];
TIM_Cmd(TIM2, DISABLE);
printf("motor2μ±?°????=%ld\r\n",current_pos[0]);
count[0]=0;
}
}
}
void TIM2_Startup(u32 frequency)
{
u16 temp_arr=1000000/frequency-1;
TIM_SetAutoreload(TIM2,temp_arr);
TIM_SetCompare2(TIM2,temp_arr>>1);
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
void Locate_Rle2(u32 frequency,DIR_Type dir)
{
if(TIM2->CR1&0x01)
{
printf("\r\nThe last time pulses is not send finished,wait please!\r\n");
return;
}
if((frequency<20)||(frequency>100000))
{
printf("\r\nThe frequency is out of range! please reset it!!(range:20Hz~100KHz)\r\n");
return;
}
motor_dir2=dir;
DRIVER_DIR2=motor_dir2;
TIM2_Startup(frequency);
}?到这里你就会发现其实原理还是相当简单的,剩下的也不再深入了,希望能够对大家帮助哈哈
实现目的:
该程序就是实现正转后隔一会再反转,大家可以根据自己需求设置到自己想要的转动情况,同时要让他停下来,只需要在自己需要的地方设置一个TIM_SetCompare2(TIM2,0)即可停下,可以自由设置。
四、总结
今天关于步进电机就暂且介绍到这里,后面有需要会再特别介绍一下,文章写得还是比较简单,相信对于你还是可以很轻松入手的,到这里别忘了给点个赞,收藏一波,顺道关注一下,厚着脸皮求三连哈哈。
有需要代码可以随时评论留下邮箱即可,看到即回,其他博文也一样,有需要即可评论带上邮箱,同时欢迎交流学习

题外话:
挺喜欢彭于晏说的一句话:“我就是没有才华,所以才用命去拼!”
学习32之路固然辛苦,但要是坚持下来了,那不是很酷?哈哈哈