基于STM32f103c8t6和L292N驱动设计避障小车(核心函数的建立为自己所写)
一.项目感触
完成这个项目自己一开始也是无法从本身上出发,看着这个最小系统板和这个电机驱动模块上面想着怎样实现让这两块板子实现四个电机上面转动呢,还要加入避障模块,自己一开始一头雾水,于是开始了漫长的借鉴之路,首先作为一个开发者,我觉得学习的地方首选是B站,所以我找了相关的做智能小车的视频
首先是B站智能小车教程,这位up主的思路和视频十分的有条理,作为一个上手的小白十分有用,同时这个视频考完了自己也就几乎完成了一大半的工作量,但是,毕竟这个up主的车子使用的电机驱动是他们自己标配的,
我们的是使用的是L298N驱动模块,使用上还是需要注意。(一不注意就踩坑,搞鼓了3天才解决问题)
关于L298N模块上的超级详解
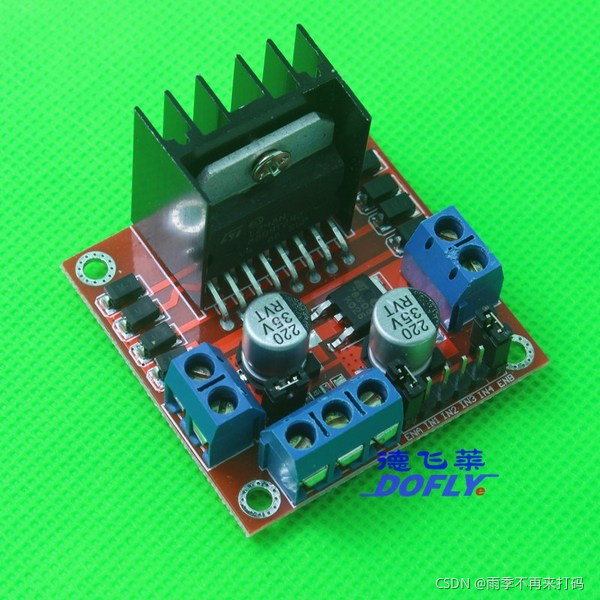
想了解这个电机的我把链接放上面了,可以自己看,有专门讲这个模块的使用。
但是我还是需要提醒各位创友们一下几个需要注意的几个方面:
(1)该模块在使用的时候,必须与单片机共地(可使用5V输出电压作为单片机的驱动电源),这样做的目的是为了使控制时所用的逻辑电平均是以同一个地做参考
(2)步进电机的驱动: 板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。ENA为A1和A2的使能端,ENB为B1和IB2的使能端。BJ接步进电机公共端。(这里的使能不是只是给电平那么简单,他还是需要调制PWM脉冲带宽,这个调制卡死了我技术的脖子,PWM没有调制一样频率会使得电机驱动上面的电容发生振荡,并有声响,同时自己在使能管脚上无法检测出电机的转向)
二.代码初讲
核心代码精讲,代码的实现是由控制PWM的输出,从而让两个使能上控制的不同的脉冲输入,函数
TIM4_PWM_Init( int mR,int mL),其中mR是控制右轮的速度,同时mL是左轮的速度
//对电机驱动管脚使能
void TIM4_PWM_Init( int mR,int mL){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//配置时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);//配置管脚
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 99 ;
TIM_TimeBaseStructure.TIM_Prescaler = 719;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV2;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = mR;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = mL;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM4, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM4, ENABLE);
TIM_Cmd(TIM4, ENABLE);
}
实现小车向前
void Motor_F(int RSpeed,int LSpeed){
Motor_Init();
GPIOB->BSRR|= GPIO_Pin_0;
GPIOB->BRR |= GPIO_Pin_1;
GPIOC->BSRR|= GPIO_Pin_14;
GPIOC->BRR |= GPIO_Pin_15;
TIM4_PWM_Init( RSpeed,LSpeed );
}
实现小车向后
void Motor_B(int Speed,int LSpeed){
Motor_Init();
GPIOB->BRR |= GPIO_Pin_0;
GPIOB->BSRR|= GPIO_Pin_1;
GPIOC->BRR |= GPIO_Pin_14;
GPIOC->BSRR|= GPIO_Pin_15;
TIM4_PWM_Init( Speed,LSpeed );
}
实现小车向右
void Motor_L(int Speed,int LSpeed){
Motor_Init();
GPIOB->BSRR |= GPIO_Pin_0;
GPIOB->BRR|= GPIO_Pin_1;
GPIOC->BRR |= GPIO_Pin_14;
GPIOC->BSRR|= GPIO_Pin_15;
TIM4_PWM_Init( Speed,LSpeed );
}
实现小车向左
void Motor_R(int Speed,int LSpeed){
Motor_Init();
GPIOB->BRR |= GPIO_Pin_0;
GPIOB->BSRR|= GPIO_Pin_1;
GPIOC->BRR |= GPIO_Pin_14;
GPIOC->BSRR|= GPIO_Pin_15;
TIM4_PWM_Init( Speed,LSpeed );
}
避障设置
float Senor_Using(void)
{
float length=0,sum=0;
u16 tim;
int i=0;
/*测5次数据计算一次平均值*/
while(i!=5)
{
GPIOB->BSRR |=(1<<8); //拉高信号,作为触发信号
delay_us(20); //高电平信号超过10us
GPIOB->BRR |=(1<<8);
/*等待回响信号*/
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==RESET);
TIM_Cmd(TIM4,ENABLE);//回响信号到来,开启定时器计数
i+=1; //每收到一次回响信号+1,收到5次就计算均值
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==SET);//回响信号消失
TIM_Cmd(TIM4,DISABLE);//关闭定时器
tim=TIM_GetCounter(TIM4);//获取计TIM4数寄存器中的计数值,一边计算回响信号时间
length=(tim+overcount*1000)/58.0;//通过回响信号计算距离
sum=length+sum;
TIM4->CNT=0; //将TIM4计数寄存器的计数值清零
overcount=0; //中断溢出次数清零
delay_ms(10);
}
length=sum/5;
return length;//距离作为函数返回值
}
void TIM4_IRQHandler(void) //中断,当回响信号很长是,计数值溢出后重复计数,用中断来保存溢出次数
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除中断标志
overcount++;
}
}
//对超声波模块进行处理
//===============================================================
/*void Elude_Input_Init_JX(void ){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE );
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void Elude_detect_barrier_JX(void ){
S_Elude_Input = 0;
S_Elude_Input = (((u8)GPIOA->IDR)&0x06)>>1;
}*/
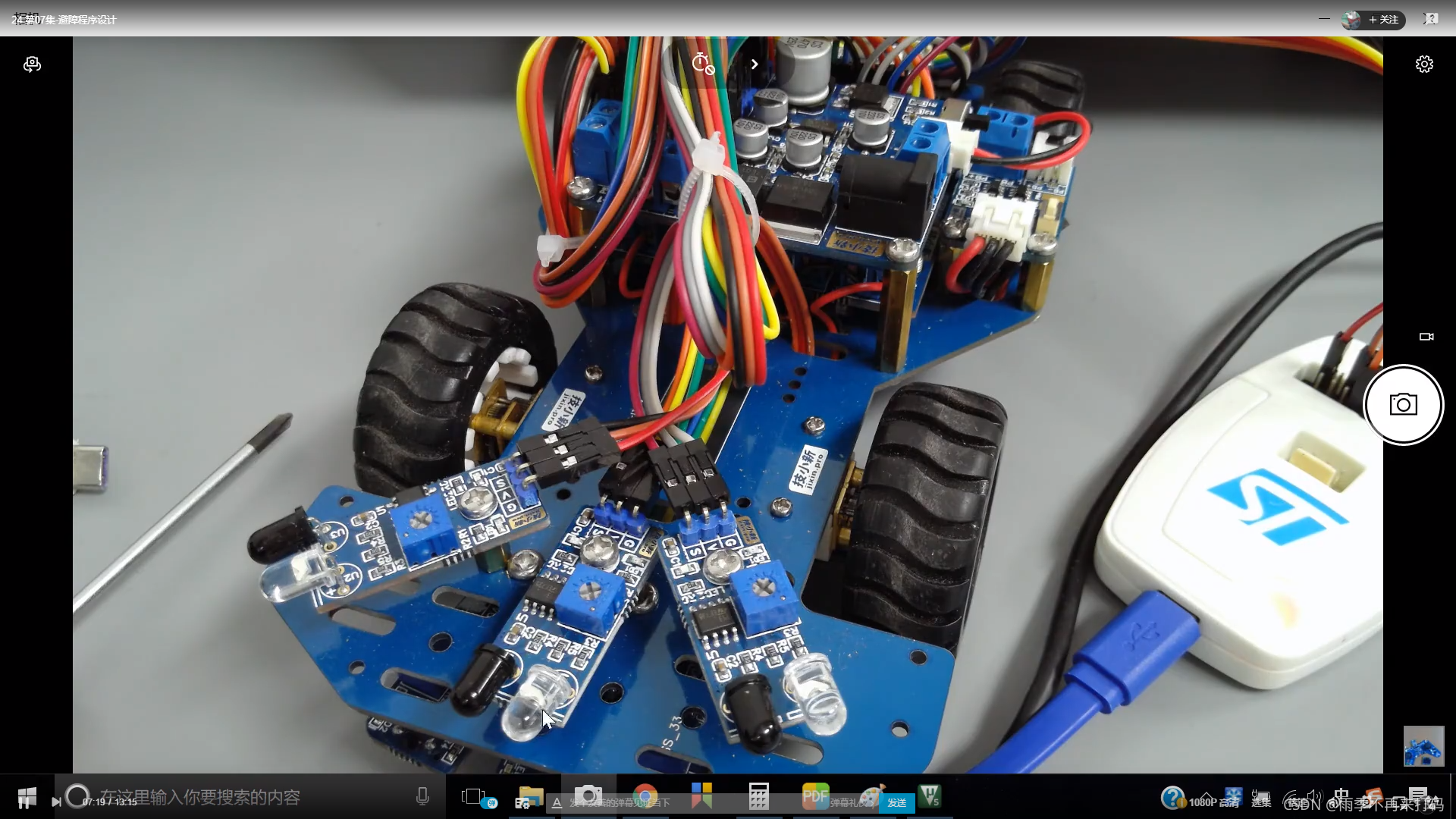
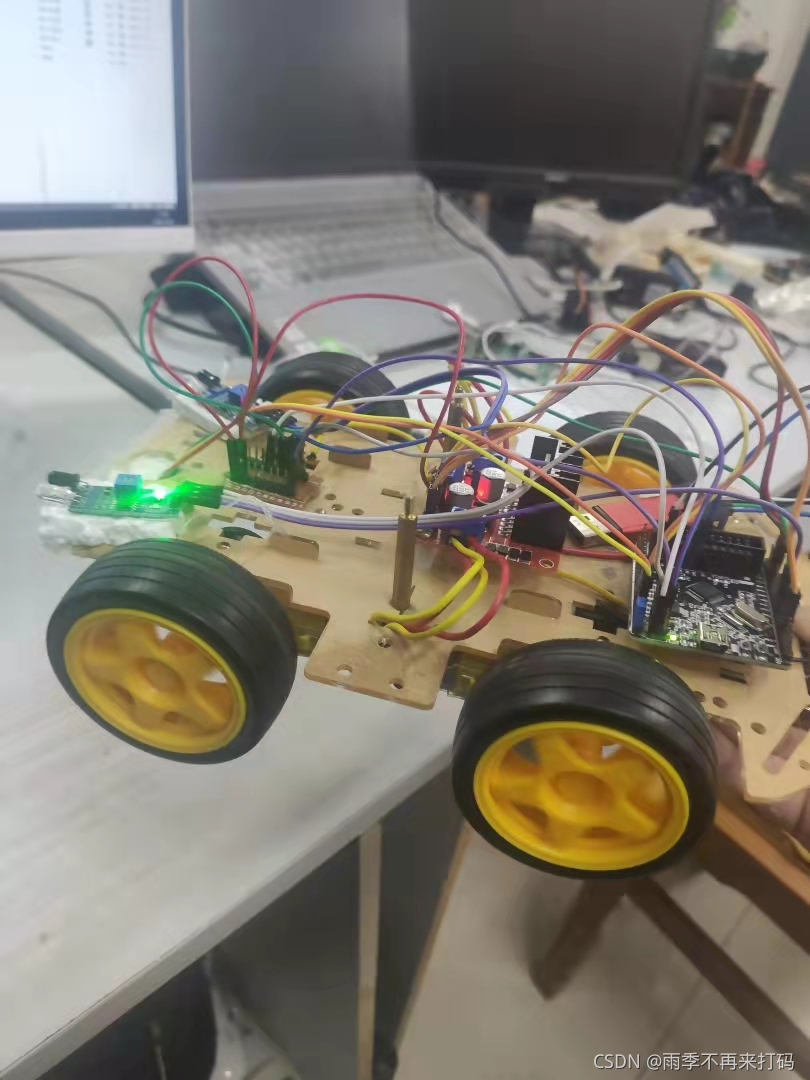
三.项目成果展示
小车没有障碍物:
遇到右侧有障碍物时:
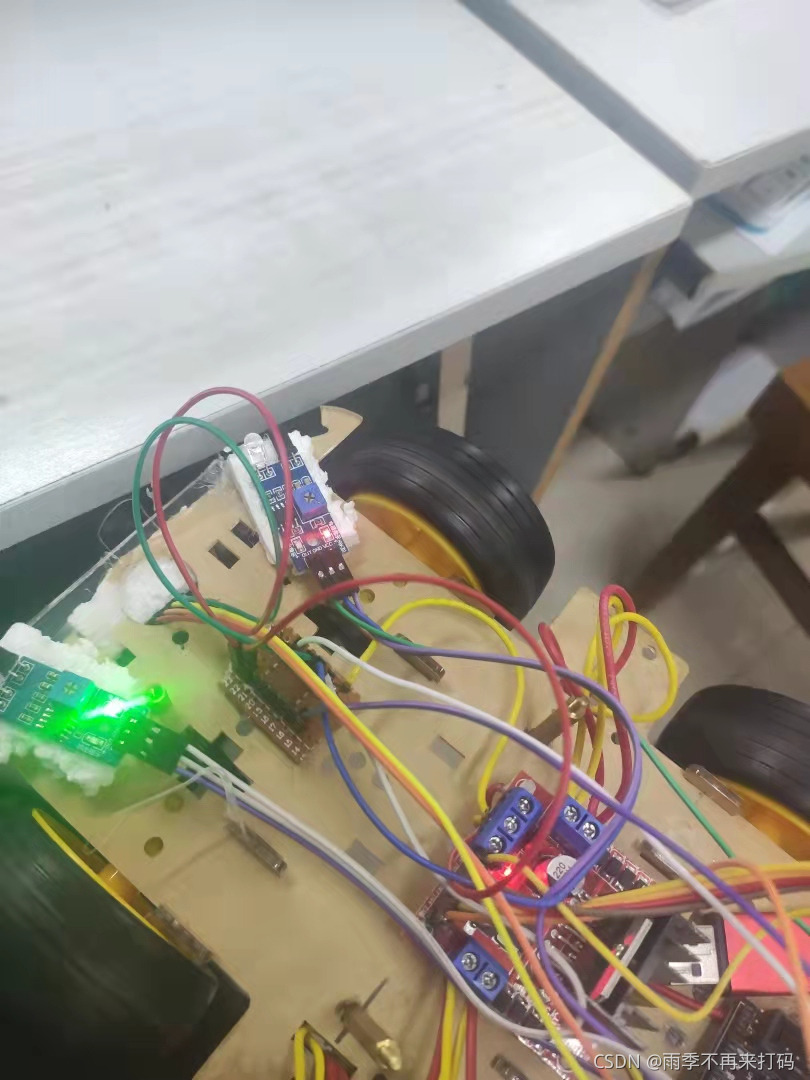
右侧车轮后退,左侧先后退,(左侧速度大于右侧速度)
遇到左侧有障碍物时:
右侧车轮后退,左侧先后退,(右侧速度大于左侧速度)
//个人还写了超声波模块,这个代码在上面应经注释;
同时为了更好的让大家学习,我将我的工程打包,这个工程有点乱,但是用做学习和梳理还是很有条理,看个人看法,我发至下载安装地,无需任何的投币和积分,同时还可以在这个渠道获取[]([51黑子网](http://www.51hei.com/bbs/space-uid-836950.html))[51黑子网](http://www.51hei.com/bbs/forum.php?mod=viewthread&tid=212128&page=1#pid1020741)谢谢大家支持。
