ͨ�ö�ʱ��PWM����:
STM32 PWM��������:
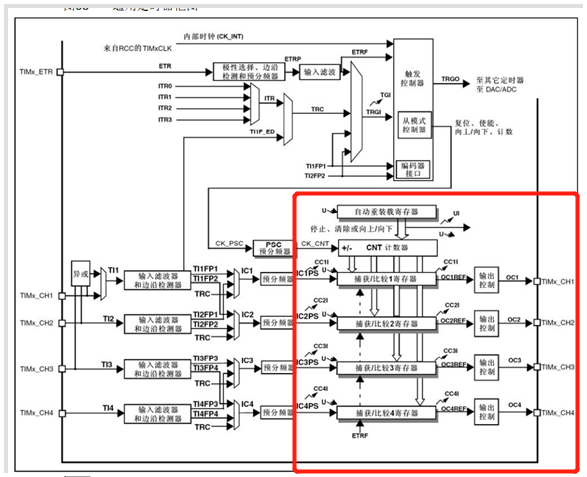
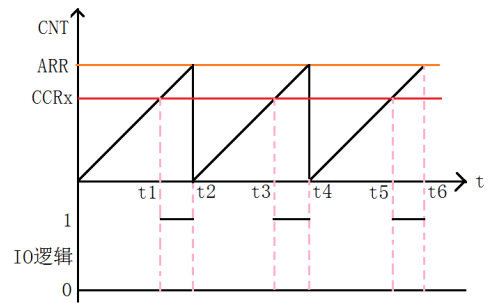
TIMx��CCRxСʱ(��0-t1)����͵�ƽ,��CCRx��ʱ(��t1-t2)����ߵ�ƽ��
ͨ��һΪ��:
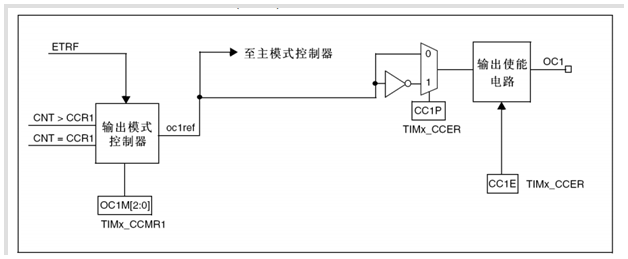
CCR1:����Ƚ�(ֵ)�Ĵ���(x=1,2,3,4):���ñȽ�ֵ��
CCMR1: OC1M[2:0]λ:
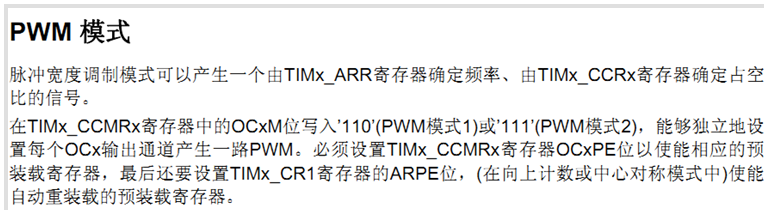
����PWM��ʽ��,��������PWMģʽ1��110������PWMģʽ2��111��
CCER:CC1Pλ:����/����1������ԡ�0:�ߵ�ƽ��Ч,1:�͵�ƽ��Ч��
CCER:CC1Eλ:����/����1���ʹ�ܡ�0:�ر�,1:��
PWMģʽ1 & PWMģʽ2:
�Ĵ���TIMx_CCMR1��OC1M[2:0]λ������:

STM32 PWM:
�⺯��:
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
//�Զ����ص�Ԥװ�ؼĴ���
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
COPYARPE=1,ARR������Ч��APRE=0,ARR�����¸��Ƚ�������Ч��
STM32 ��ʱ��3���ͨ������:
PWM����⺯������:
PWM����⺯��
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);COPYtypedef struct
{
uint16_t TIM_OCMode; //PWMģʽ1����ģʽ2
uint16_t TIM_OutputState; //���ʹ�� ORʧ��
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //�Ƚ�ֵ,дCCRx
uint16_t TIM_OCPolarity; //�Ƚ��������
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
COPYTIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWMģʽ2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //�Ƚ����ʹ��
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //�������:TIM����Ƚϼ��Ը�
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //����Tָ���IJ�����ʼ������TIM3 OC2
COPY-
���ñȽ�ֵ����:
void TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t Compare2);COPY -
ʹ������Ƚ�Ԥװ��:
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);COPY -
ʹ���Զ���װ�ص�Ԥװ�ؼĴ�������λ:
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);COPY
ʵ��:
Ҫ��:
ʹ�ö�ʱ��3��PWM����,���ռ�ձȿɱ��PWM��,��������LED��,�Ӷ��ﵽLED[PB5]�����ɰ�����,�ִ����䰵,���ѭ����
PWM�������:
1,ʹ�ܶ�ʱ��3�����IO��ʱ�ӡ�
ʹ�ܶ�ʱ��3ʱ��:RCC_APB1PeriphClockCmd();
ʹ��GPIOBʱ��:RCC_APB2PeriphClockCmd();
2, ��ʼ��IO��Ϊ���ù������������:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
3,����������Ҫ��PB5������ʱ����PWM�������,����Ҫ��ӳ������,
������Ҫ����AFIOʱ�ӡ�ͬʱ������ӳ�䡣
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
4, ��ʼ����ʱ��:ARR,PSC��:TIM_TimeBaseInit();
5, ��ʼ������Ƚϲ���:TIM_OC2Init();
6, ʹ��Ԥװ�ؼĴ���: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
7, ʹ�ܶ�ʱ����TIM_Cmd();
8, ���ϸı�Ƚ�ֵCCRx,�ﵽ��ͬ��ռ�ձ�Ч��:TIM_SetCompare2();
��д����(��ע��):
��дtimer.h:
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_Int_Init(u16 arr,u16 psc);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
COPY��дtimer.c:
#include "timer.h"
#include "led.h"
#include "usart.h"
//ͨ�ö�ʱ��3�жϳ�ʼ��
//����ʱ��ѡ��ΪAPB1��2��,��APB1Ϊ36M
//arr:�Զ���װֵ��
//psc:ʱ��Ԥ��Ƶ��
//����ʹ�õ��Ƕ�ʱ��3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //ʱ��ʹ��
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ ������5000Ϊ500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ 10Khz�ļ���Ƶ��
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //ʹ��ָ����TIM3�ж�,���������ж�
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3�ж�
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //��ռ���ȼ�0��
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //�����ȼ�3��
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨ����ʹ��
NVIC_Init(&NVIC_InitStructure); //����NVIC_InitStruct��ָ���IJ�����ʼ������NVIC�Ĵ���
TIM_Cmd(TIM3, ENABLE); //ʹ��TIMx����
}
//��ʱ��3�жϷ������
void TIM3_IRQHandler(void) //TIM3�ж�
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //���ָ����TIM�жϷ������:TIM �ж�Դ
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //���TIMx���жϴ�����λ:TIM �ж�Դ
LED1=!LED1;
}
}
//TIM3 PWM���ֳ�ʼ��
//PWM�����ʼ��
//arr:�Զ���װֵ
//psc:ʱ��Ԥ��Ƶ��
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //ʹ�ܶ�ʱ��3ʱ��
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //ʹ��GPIO�����AFIO���ù���ģ��ʱ��
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3������ӳ�� TIM3_CH2->PB5
//���ø�����Ϊ�����������,���TIM3 CH2��PWM���岨�� GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //�����������
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//��ʼ��GPIO
//��ʼ��TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //��������һ�������¼�װ�����Զ���װ�ؼĴ������ڵ�ֵ
TIM_TimeBaseStructure.TIM_Prescaler =psc; //����������ΪTIMxʱ��Ƶ�ʳ�����Ԥ��Ƶֵ
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //����ʱ�ӷָ�:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM���ϼ���ģʽ
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //����TIM_TimeBaseInitStruct��ָ���IJ�����ʼ��TIMx��ʱ�������λ
//��ʼ��TIM3 Channel2 PWMģʽ
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //ѡ��ʱ��ģʽ:TIM������ȵ���ģʽ2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //�Ƚ����ʹ��
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //�������:TIM����Ƚϼ��Ը�
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //����Tָ���IJ�����ʼ������TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //ʹ��TIM3��CCR2�ϵ�Ԥװ�ؼĴ���
TIM_Cmd(TIM3, ENABLE); //ʹ��TIM3
}
COPYmain.c:
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "timer.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //��ʱ������ʼ��
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //����NVIC�жϷ���2:2λ��ռ���ȼ�,2λ��Ӧ���ȼ�
uart_init(115200); //���ڳ�ʼ��Ϊ115200
LED_Init(); //LED�˿ڳ�ʼ��
TIM3_PWM_Init(899,0); //����Ƶ��PWMƵ��=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}
}
COPY����ת����:��ʱ��PWM���ʵ�� �C ��������
��ӭ��ע�������ں�,��ȡ����Ӳ��ѧϰ�ɻ�!

?
������Ϊ���ṩʲô?
��������:C++��Java��Ƕ��ʽ����/Ӳ��
��Ŀ����:����/Ӳ����Ŀ����ʵѵ��Ŀ
��ҵ����:��ҵȫ���̸�����������ҵ֧��
�Խ���ҵHR:���������������˲�
?